
Abstract
Extensive research efforts have been made to address the motion control of rigid-link electrically-driven (RLED) robots in literature. However, most existing results were designed in joint space and need to be converted to task space as more and more control tasks are defined in their operational space. In this work, the direct task-space regulation of RLED robots with uncertain kinematics is studied by using neural networks (NN) technique. Radial basis function (RBF) neural networks are used to estimate complicated and calibration heavy robot kinematics and dynamics. The NN weights are updated on-line through two adaptation laws without the necessity of off-line training. Compared with most existing NN-based robot control results, the novelty of the proposed method lies in that asymptotic stability of the overall system can be achieved instead of just uniformly ultimately bounded (UUB) stability. Moreover, the proposed control method can tolerate not only the actuator dynamics uncertainty but also the uncertainty in robot kinematics by adopting an adaptive Jacobian matrix. The asymptotic stability of the overall system is proven rigorously through Lyapunov analysis. Numerical studies have been carried out to verify efficiency of the proposed method.
Introduction
A great many methods for motion control of robot manipulators have been proposed in literature in the past decades. It is noticed that for many of these control methods such as Slotine and Weiping 1 ; Tomei 2 ; Arimoto 3 ; Kelly 4 ; Lin 5 ; Bascetta and Rocco 6 ; Wai and Muthusamy 7 ; Nojavanzadeh and Badamchizadeh 8 ; Wu et al., 9 the controllers are formulated in the joint space. Nevertheless, for more and more modern applications of robot manipulators (e.g. service robot, surgical robot, and other human-robot interactions) the control task is defined in task/operational space. One major constraint of the joint-space control methods is that in order to fulfill the given task-space control objectives the desired or reference joint position or path must be calculated based on the robot’s inverse kinematics. Considering the complexity of inverse kinematics calculation, a first regulation control method that is designed directly in task-space was developed in Takegaki and Arimoto 10 by using a transposed Jacobian matrix. Later on, many other results have been developed for task-space robot manipulator control such as Miyazaki and Masutani 11 ; Lewis et al. 12 ; Kelly 13 ; Kelly et al. 14 These task-space control methods are based on the common basis that the kinematic information of the robot manipulator is accurately known such that the exact Jacobian matrix mapping joint-space velocity to its task-space counter-part is available. But in real practice, the robot kinematics may not be perfectly known mainly due to two sources of uncertainty: robot calibration errors; end position change of the grasped object after/during pick-up manipulation and interaction with the working environment. In such cases, the robot kinematics cannot be accurately obtained and thus lead to degraded performance or even instability if the above task-space control methods are directly applied. To handle the uncertain kinematics issue, several task-space control strategies have been proposed based on the concept of “approximate Jacobian matrix” in Yazarel and Cheah 15 ; Liu and Cheah 16 ; Liu et al. 17
It should be noted that, including the above-mentioned control methods, many robot manipulator motion control methods in literature only consider the manipulator dynamics assuming the required control torque can be faithfully generated by perfect joint actuators with no time-delay. However, if good control performance for the robot manipulator with high-speed and high-accuracy requirements is to be achieved, the actuator dynamics should be considered in the overall system control design as well as indicated by Good et al. 18 To explicitly consider the actuator dynamics in control system design, several methods based on nonlinear feedback linearization, singular perturbation, adaptive, robust and fuzzy techniques have been developed to address the motion control problem for rigid-link electrically-driven (RLED) robots as in Good et al. 18 ; Guenther and Hsu 19 ; Su and Stepanenko 20 ; Burg et al. 21 ; Ishii et al. 22 ; Oya et al. 23 ; Khorashadizadeh and Fateh 24 ; Soltanpour et al. 25 ; Rani and Kumar. 26 During the last few decades, neural network (NN) techniques have been employed for motion control of RLED robot manipulators, such as Lewis et al. 27 ; Ge and Hang 28 ; Kim and Lewis. 29 The advantage of neural network techniques when used for robot manipulator control is their capability to online approximate unknown nonlinear models. In Kwan et al., 30 a robust NN controller was proposed for robots with actuator dynamics. The proposed method only guarantees uniformly ultimately bounded (UUB) stability of the closed-loop system and hence the position errors are not guaranteed to converge. Later on, other types of NN-based methods have been proposed to address the same control problem with similar conclusions on motion tracking errors such as Huang et al. 31 ; Wu et al. 32 ; Zeng and Wang. 33 The work in Shafiei and Soltanpour 34 shows that asymptotic error convergence can be achieved using robust neural network control. But all these results are confined to joint-space control and only system uncertainties in dynamics are considered. Robot kinematics uncertainties are not taken into account in these control designs and therefore they suffer the same problem as the aforementioned joint-space controllers.1–14,18–26
In this paper, we propose a new adaptive neural networks control method for task-space regulation of RLED robots with uncertainties existing in kinematics. The main contribution of the proposed method lies in that, different from most existing NN-based controllers for RLED robots, asymptotic stability of the overall system can be guaranteed with the presence of all uncertainties in the robot kinematics, dynamics and the actuator dynamics. Also, compared with the control methods using approximate Jacobian matrix to handle kinematics uncertainty in Yazarel and Cheah 15 ; Liu and Cheah 16 ; Liu et al., 17 no task-space velocity measurement is required. Two radial basis function (RBF) neural networks are employed to approximate unknown dynamics functions involving uncertain kinematics terms and the NN weights are updated on-line through two adaptation laws without the necessity of off-line training. The numerical studies confirm that the developed method is efficient for the RLED robot regulation task considering the uncertainties in kinematics and dynamics of the robot and actuator system.
Preliminaries
Important properties of RLED robot
Kinematics
When the control task is formulated in the operational/task space, reference position or trajectory for the robot manipulator to follow is usually defined directly in the corresponding operational/task space. The kinematic relationship between the joint space coordinates and the corresponding task space coordinates can be defined as 17 :

where

where
Dynamics
When the actuator dynamics is considered in the overall robot manipulator system, the dynamics of RLED robot with


where

where
For the voltage-driven actuator dynamics which is expressed by (4),
In this work, some important properties about the dynamics and kinematics of the robot manipulator will be used in the control design and stability analysis and hence are introduced here 3 :
Property A: The inertia matrix
Property B: The matrix

Property C: The robot kinematics parameters can be linearized and extracted in form of a vector as

where
Property A, B will be shown important in the Lyapunov analysis of overall system stability, and Property C enables an adaptive Jacobian matrix to be designed to handle the uncertainty in robot kinematics.
Neural networks approximation
Neural networks possess many important properties. In control engineering, its capability to approximate a given nonlinear function
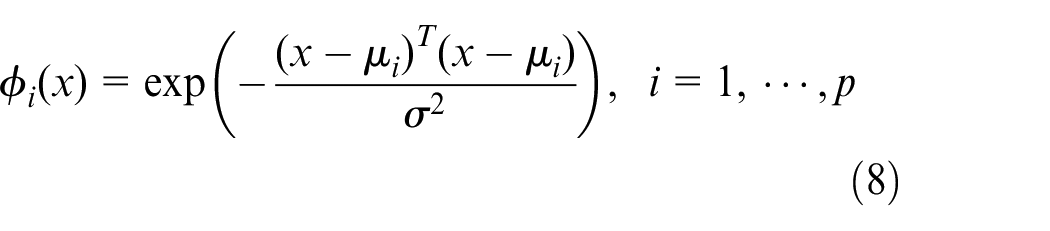
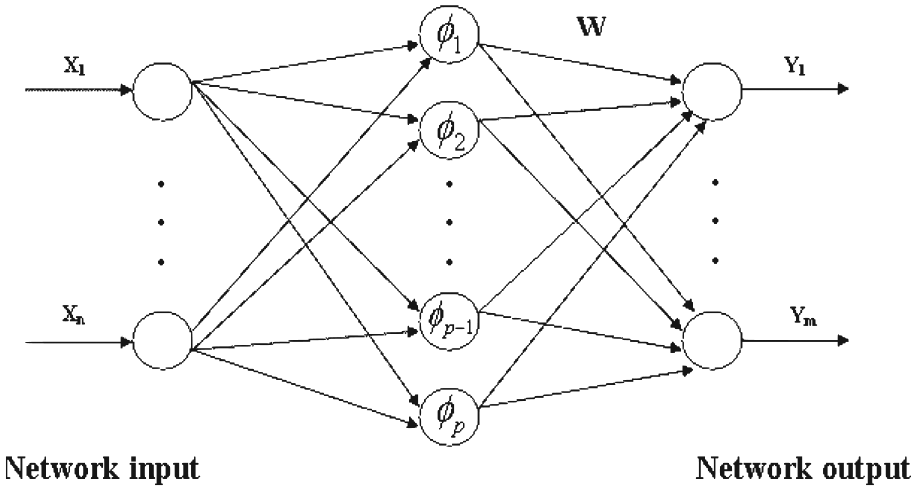
RBF neural network.
where

where

where
Adaptive neural network regulation of RLED robot
In this section, a task-space adaptive neural network regulation method is proposed for RLED robots. The control development employs the backstepping technique. The general idea is to separate the actuator control voltage input design into two steps: the first step is to formulate an actuator armature current reference command
Armature current reference design
The robot manipulator dynamics as defined in (3) could be re-formulated by considering the reference armature current

where
Considering the existence of uncertainty in robot kinematics, the accurate Jacobian matrix is not available. Then an adaptive Jacobian matrix

where
There are constants

An illustrative example of such kind of saturated function could be the hyperbolic tangent function
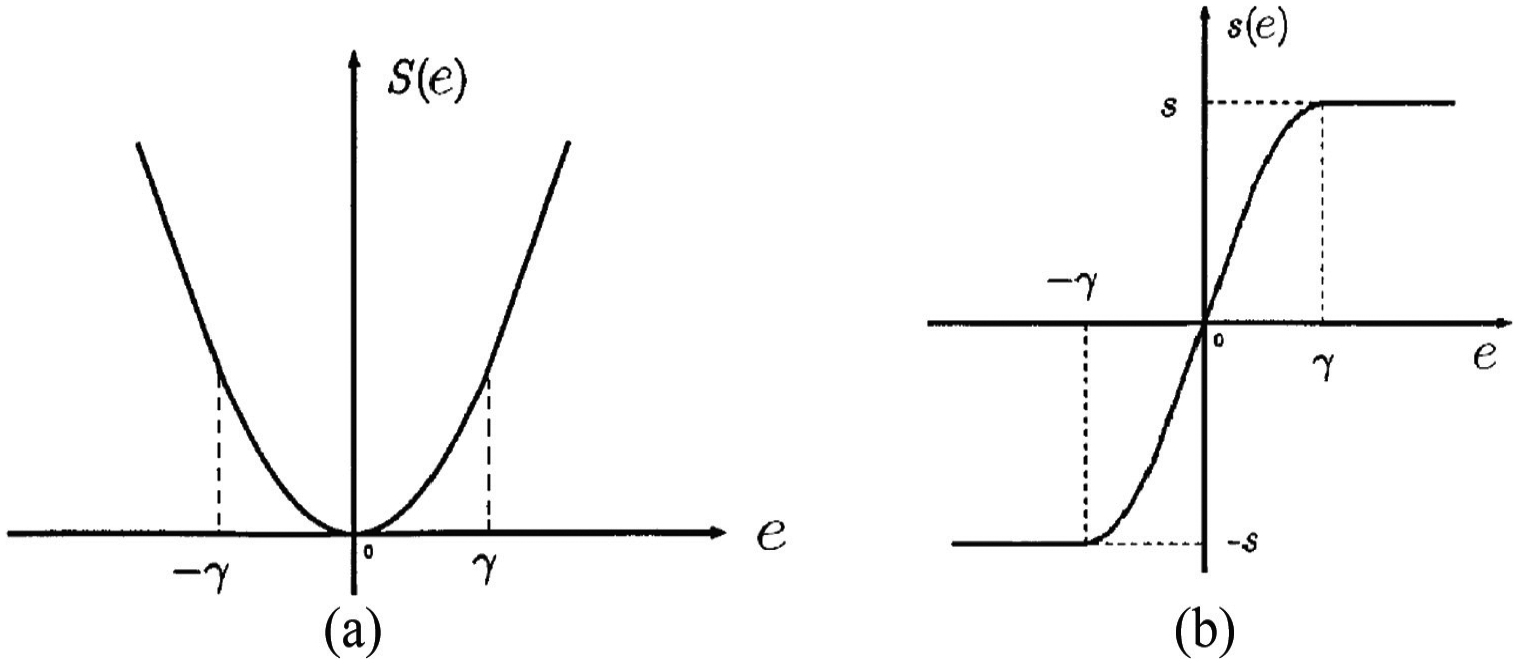
(a) The integration S(e) of saturated function (b) The saturated function s(e).
Since the actuator dynamics parameters are assumed to be unknown, let

where

where

where
Since the real kinematic parameters in
Substituting the desired current (14) into (11), we have
It can be further written as
The following nonlinear function can be approximated by a RBF neural network using basis function

where
Note that
Substituting equation (21) into (19), the closed-loop manipulator dynamics can be obtained as:

where
Control voltage input design
After a desired armature current has been formulated, in this step a control voltage input will be designed which should serve to make the actual current follow the desired signal. From the actuator dynamics subsystem (4), we have

where
Similar as in the preceding step, the following nonlinear function can be represented by a neural network with certain “ideal” weight matrix

where
Substituting (24) into (23), we have

The control voltage input can be proposed as

where

Substituting

where
Overall system stability analysis
In the preceding two subsections, the closed-loop manipulator and actuator subsystems have been obtained with the proposed desired current and control voltage input. Now the stability of the overall closed-loop system will be evaluated using Lyapunov theory.
We propose a Lyapunov function for the overall RLED robot system in the following form
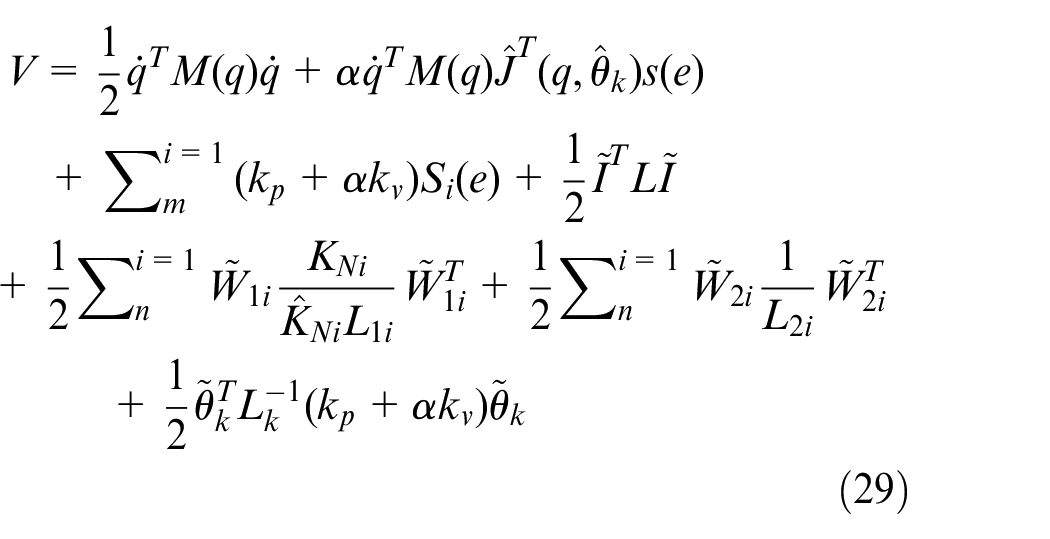
where
Note that
and the control parameters

where
Hence by substituting inequality (31) into (29), it has
It’s clear that if inequality (31) is satisfied, the Lyapunvo candidate
Differentiating
Since
Substituting
here Property B has been used.
Substituting the NN weights updating laws (15) and (27) and using equation (12), the above inequality can be written as
According to adaptation law (16) and the definition of the projection operator, it’s easily verified that 38

Hence we have
Now define the two robustifying terms


where
Then inequality (38) can be simplified to
where
According to


then matrix

Then we can reach the following Theorem:
Theorem: With the armature current reference design (14), the control voltage input
Proof: If condition (31) is satisfied, it is clear from inequality (32) that
Remark 1: It should be noted that the stability conditions (31), (43), and (44) are not really restrictive and can be achieved by simply choosing large enough control gains
Remark 2: Although
Numerical study
In order to evaluate the efficiency of the proposed control strategy, numerical studies have been carried out based on a 2-link RLED robot holding an objected as illustrated in Figure 3. The regulation task is to move the end-point of the grasped object from a staring position to a desired position defined in the robot base frame which can be taken as the world frame or Cartesian frame in this study. The object position is supposed to be obtained through an external measure system (e.g. camera, optical tracker, etc.). The robot kinematics parameters together with the object length and its grasping angle are assumed to be unknown as well as the manipulator and actuator dynamics parameters, which presents a challenging task for the RLED robot control.
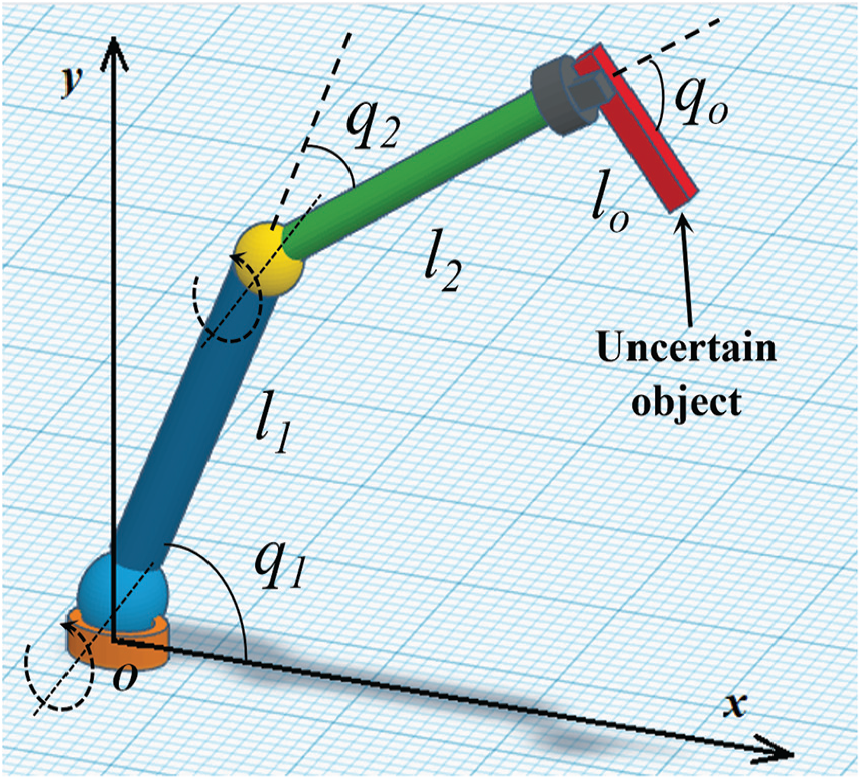
Two-link robot grasping uncertain object.
Three case studies were carried out taking into consideration of different initial and desired positions in the regulation control task in order to demonstrate the general effectiveness of the proposed controller within the robot workspace and its robustness against uncertainties. Case 1 sets the initial position of the object end-point to
It should be noted that for all three case studies the same control parameters have been used as

The two Gaussian RBF neural networks used in this simulation each contains 20 nodes, and the values of
Ground truth settings
The true robot manipulator and object kinematic and dynamic parameters (ground-truth) are set to the following:
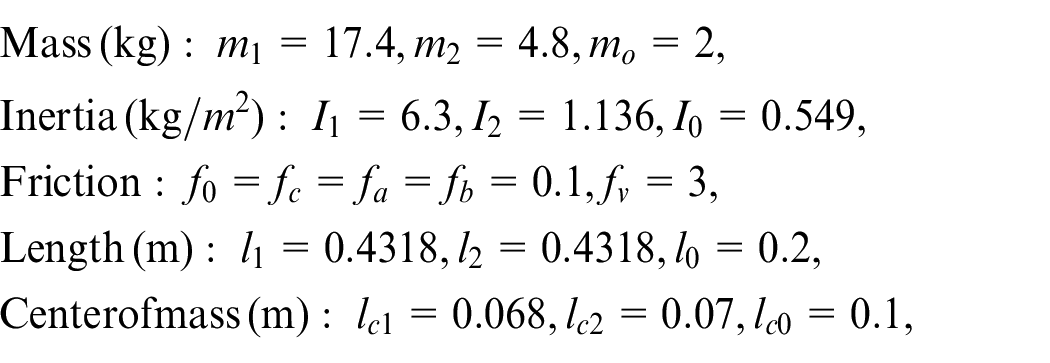
and the object grasping angle is set as

Computational method
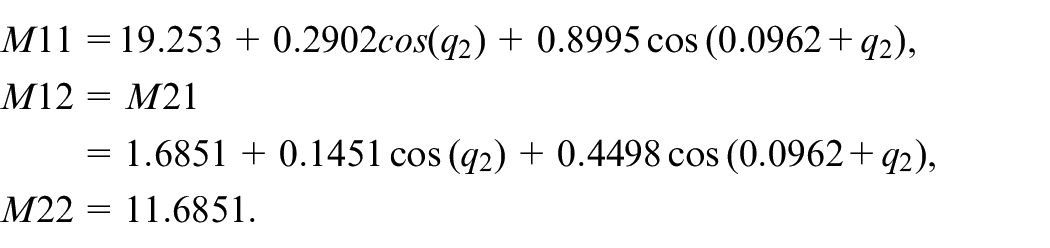
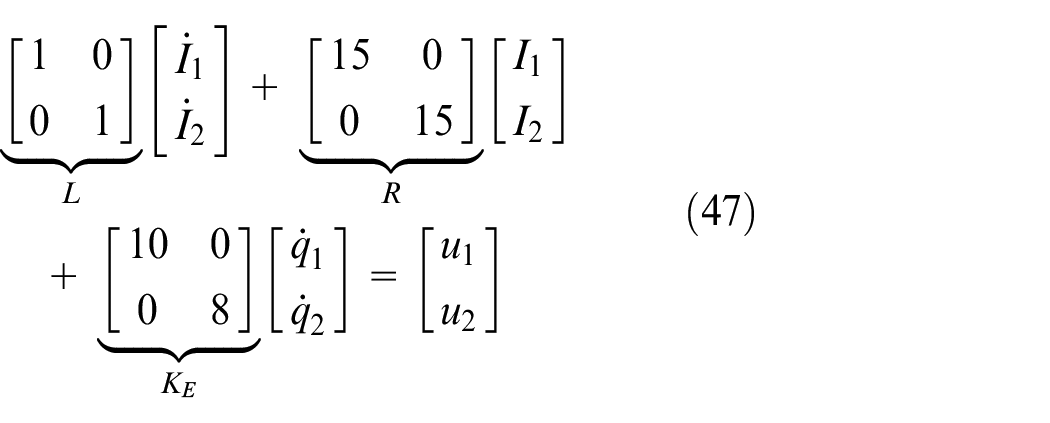
The system diagram of the proposed control method is illustrated in Figure 4 and serves as the guidance of the computational method development in the numerical studies. With the ground truth parameters, the 2-link (2-DoF) RLED system dynamics as expressed in (3) and (4) can be explicitly written in form of (46) and (47):
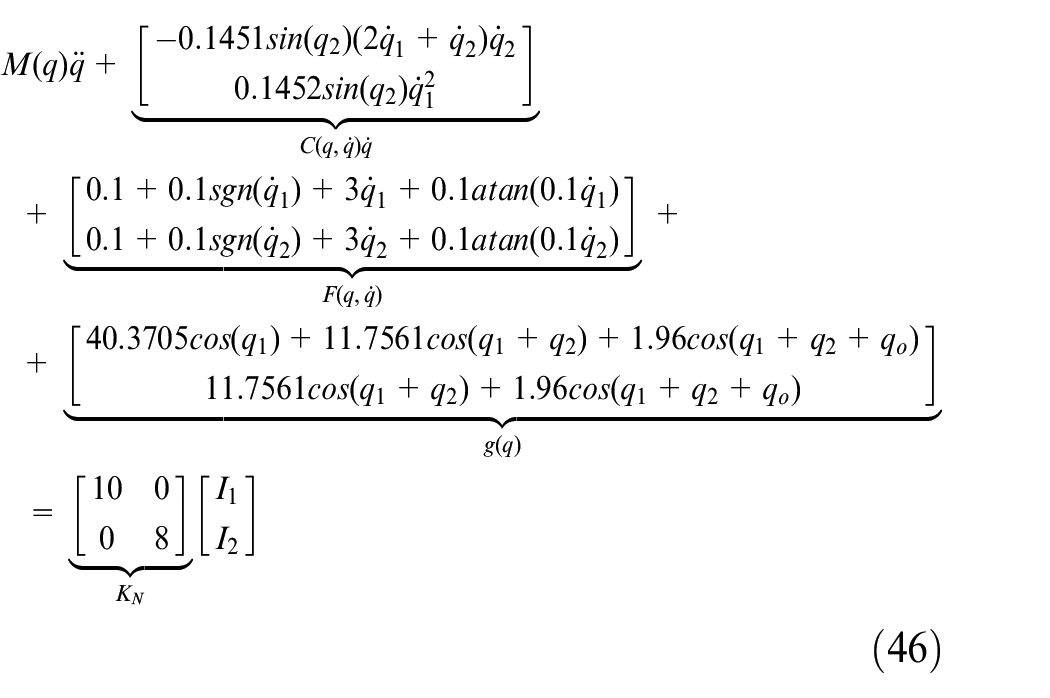
where
Using the defined control parameters and defining the saturation function as

and

where the specific values of
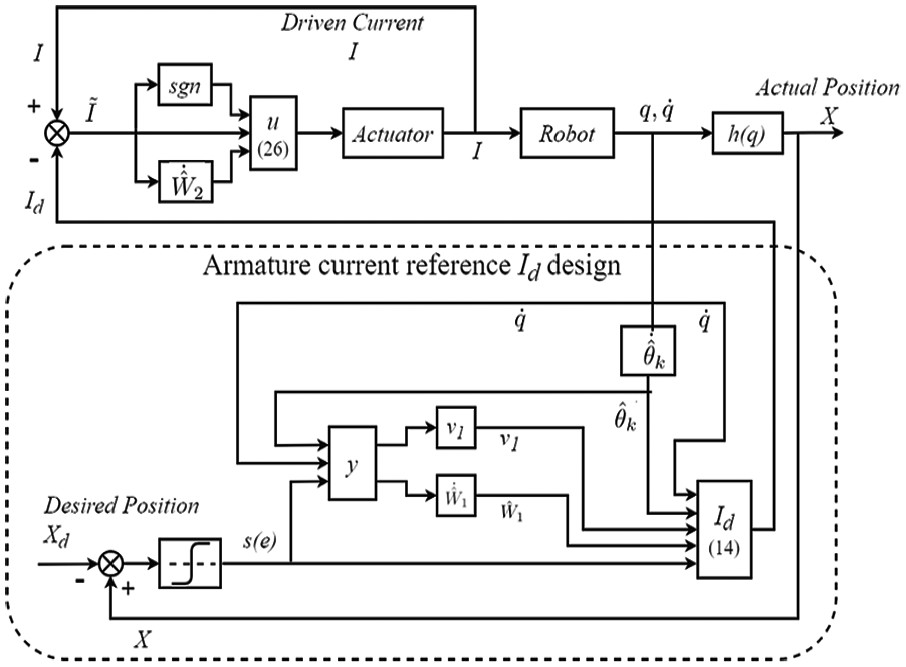
Control system diagram.
The adaptive parameters



whose general forms are given in (15), (27), and (16) of the control design section.
Case studies
Case 1
In the first case study, control performances of the proposed method facing two different levels of system uncertainties are evaluated. First of all, small uncertainties are introduced into the control design and the following inaccurate kinematic and dynamic parameters

and the approximate actuator matrix
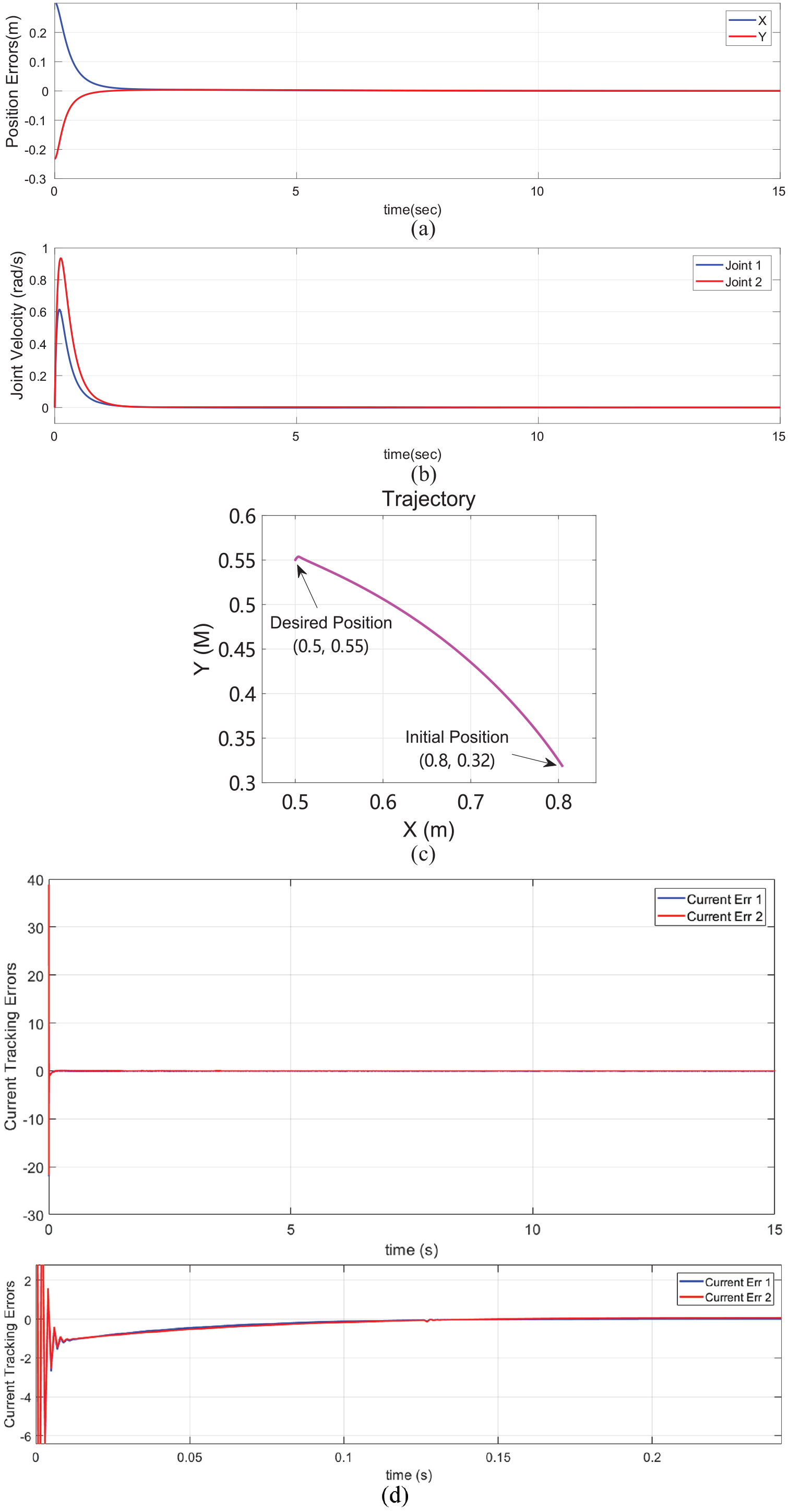
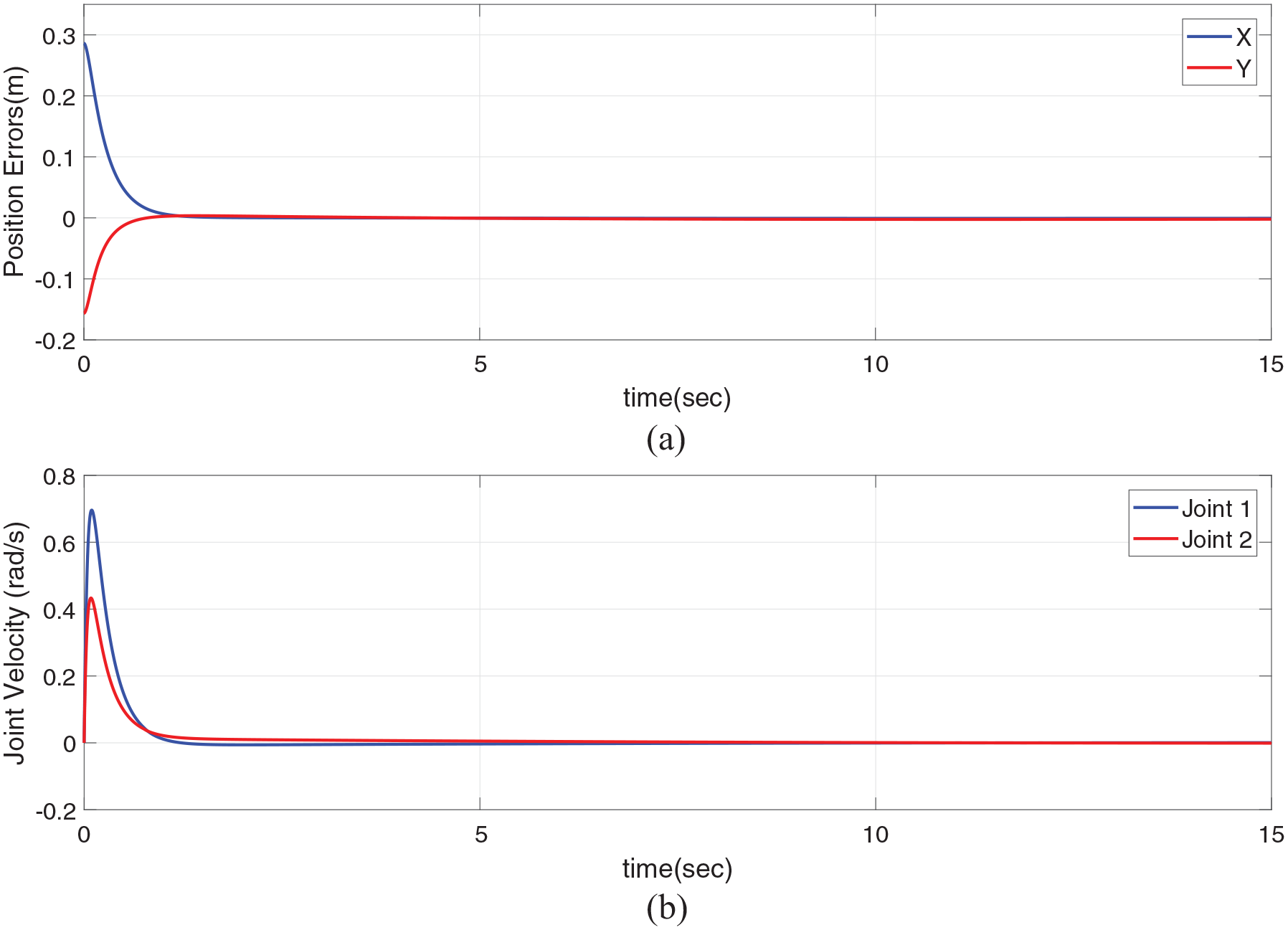
Case 1.a:
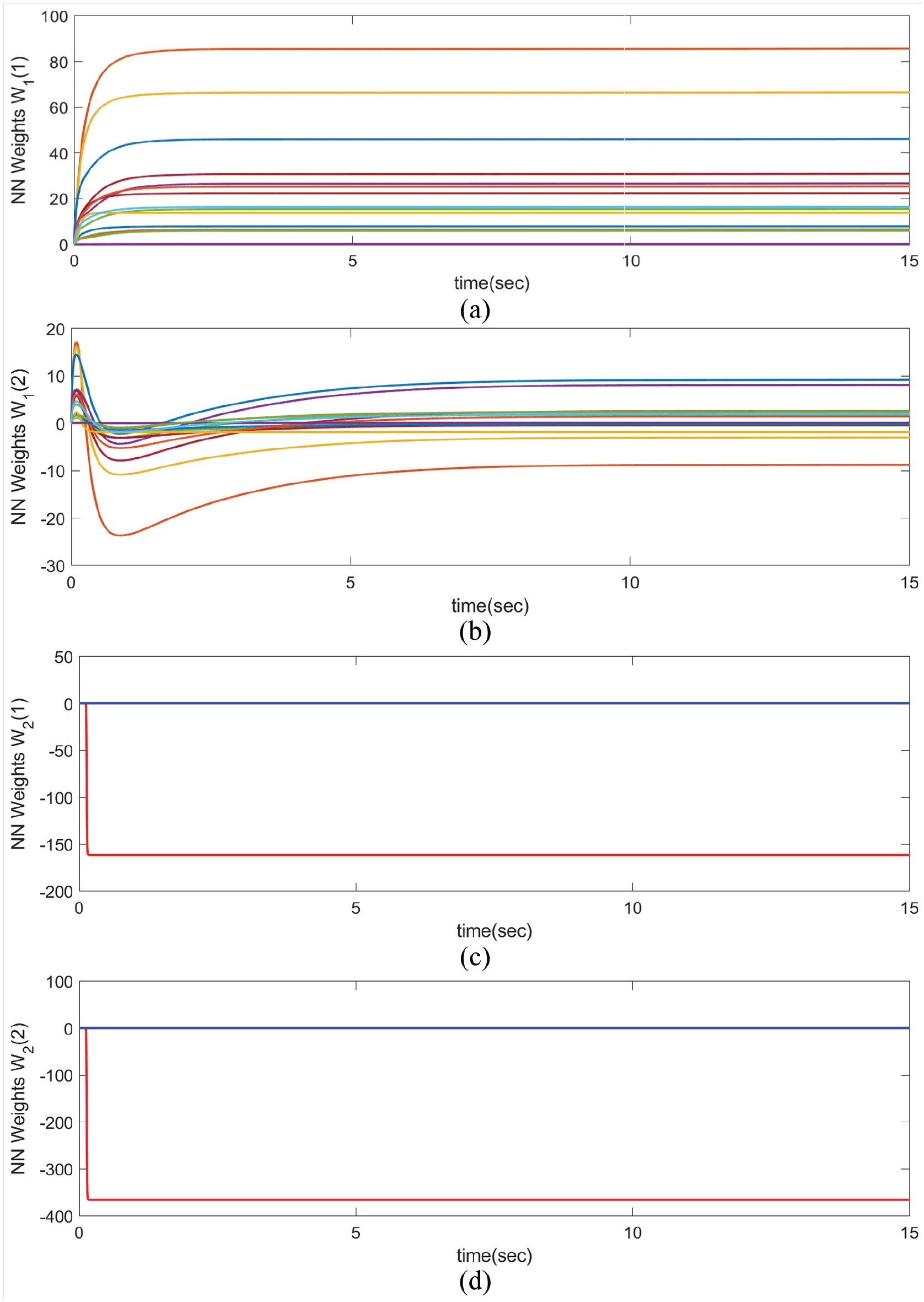
Case 1.a: Time evolution of NN weights: (a) Ŵ1(1), (b) Ŵ1(2), (c) Ŵ2(1), and (d) Ŵ2(2).
Next, larger uncertainties are introduced into the RLED robot system and the approximate kinematic and dynamic parameters used in the control design are

and the approximate actuator matrix is set to
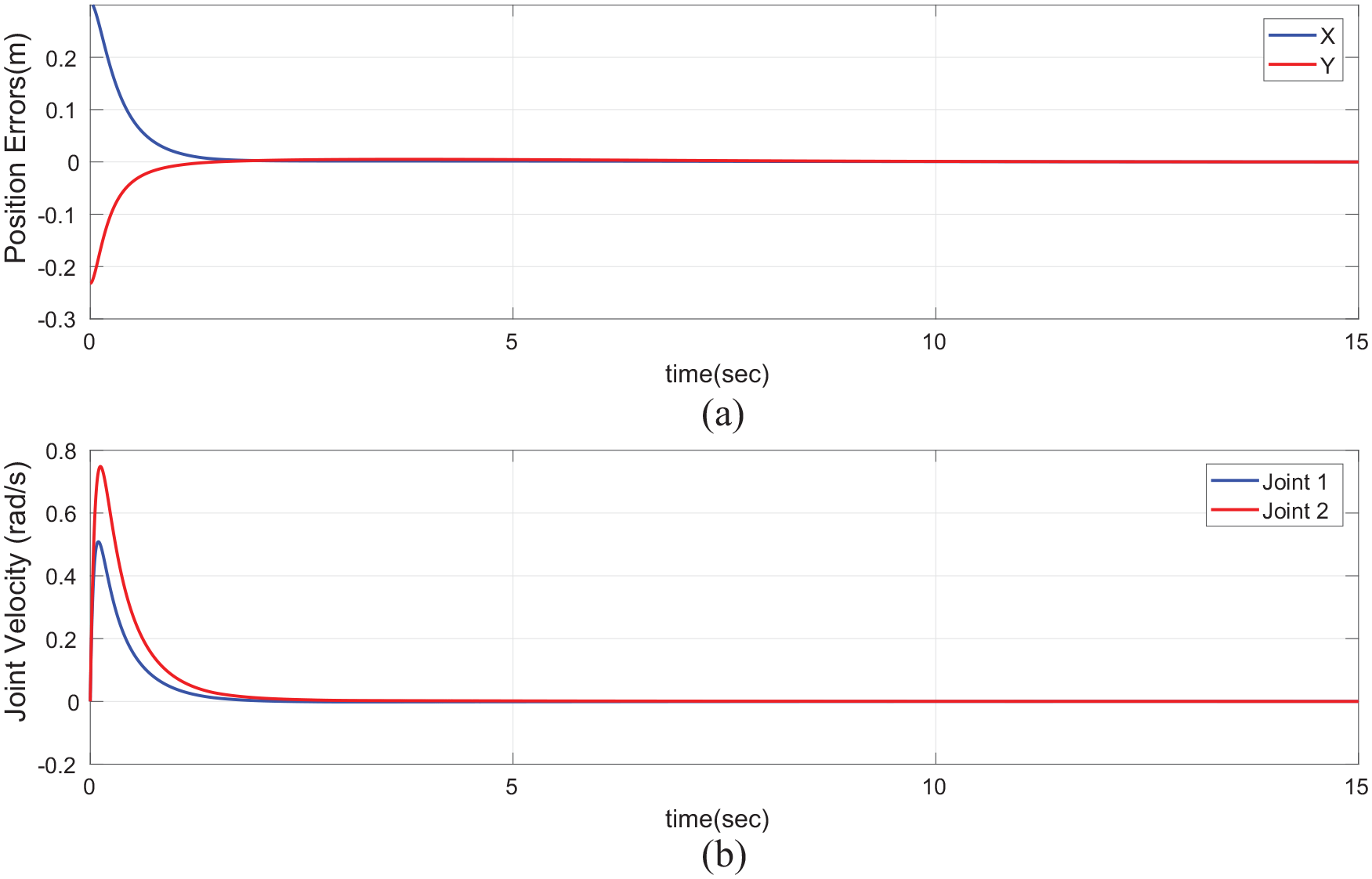
Case 1.b:
Case 2
In this case study, the position regulation task is to move from the same initial position

With the same control parameters as in
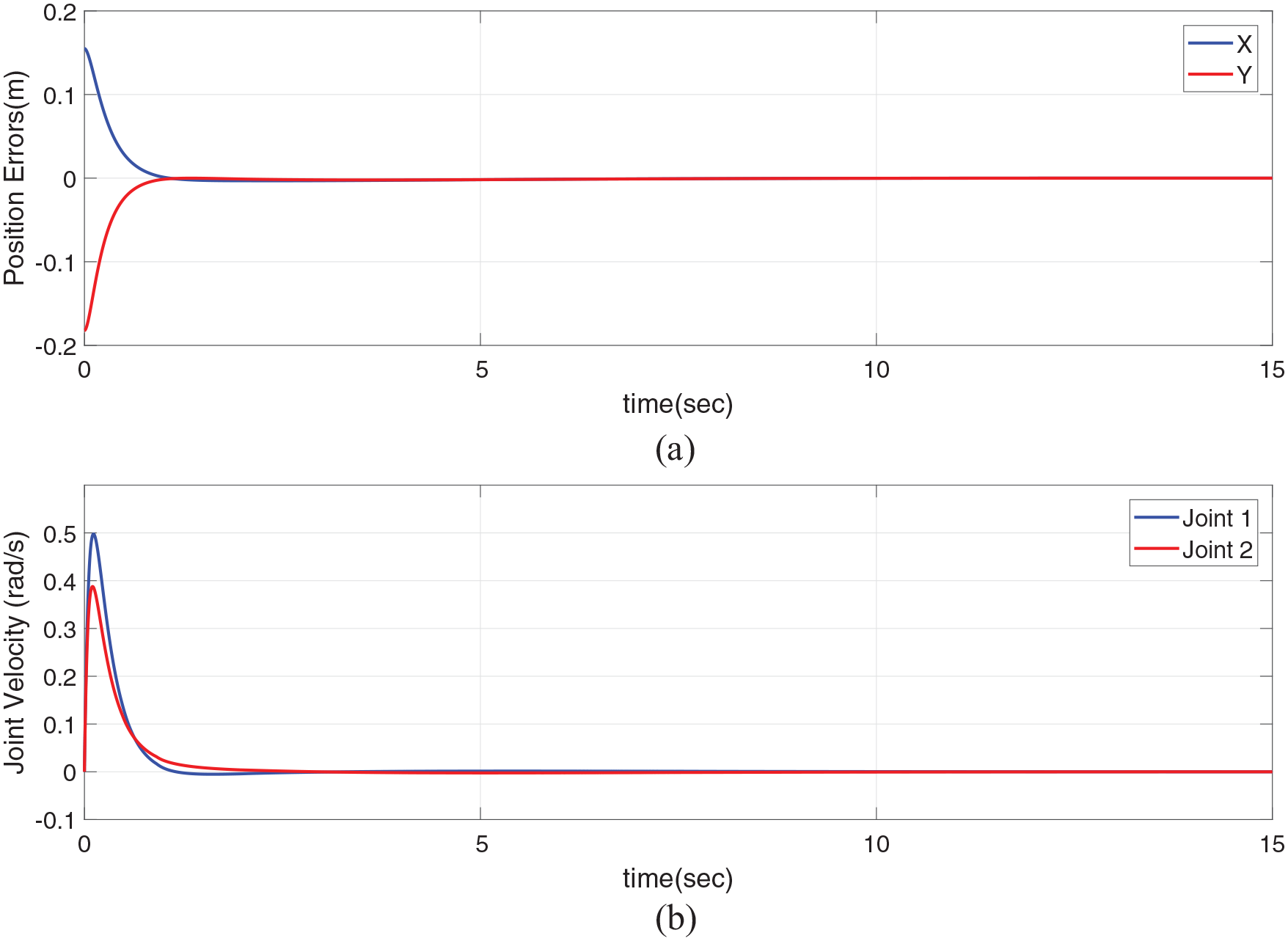
Case 2:
Case 3
In this case study, the position regulation task is to move from a different initial position
Case 3:
Discussions
From the results of the three numerical studies, it can be seen that despite the existence of relatively large uncertainties in the kinematics and dynamics of RLED robot system the proposed regulation method can always provide good control performance with fast and smooth convergence of position errors
From the numerical study results, it is also noted that the use of neural network with online updating weight gains does not lead to slow response of the control system which again confirms its utility in real-time robot control as reported in literature. Indeed, the neural network weights settle down quickly as shown in Figure 6. More precisely, the NN weight

where the current tracking error

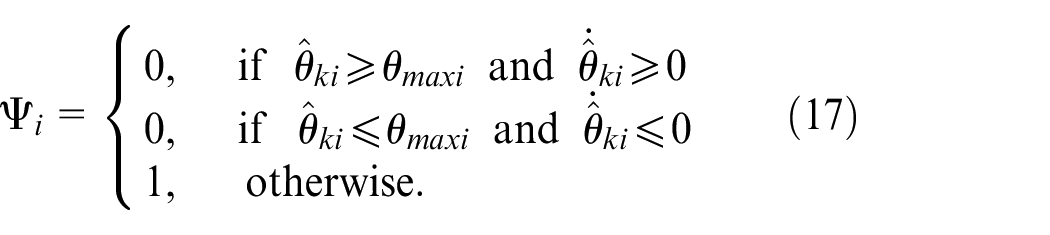
Another important remark to make is that there’s no guarantee for the adaptive parameters (
Conclusion
This paper presents a new task-space regulation method to solve the uncertain kinematics and dynamics problem for rigid-link electrically-driven (RLED) robots by resorting to adaptive Jacobian matrix and neural network technique. The proposed method can tolerate inaccuracy or changes in robot kinematics and dynamics caused by malcalibration or perturbations during the control process. The two Gaussian RBF neural networks employed in the controller can approximate complicated nonlinear dynamics functions and therefore eliminate the tedious and time-consuming regressors development work as required by traditional adaptive control methods. The NN weights are updated on-line without the necessity of off-line training. It is shown through rigorous Lyapunov analysis that asymptotic stability of the closed-loop overall system can be achieved instead of only uniformly ultimate boundedness as concluded by most existing neural network robot control methods. The numerical studies including three case studies with different regulation positions and different levels of system uncertainties have been carried out and the control performances verified the efficiency of the proposed control method. As direct extension of this work, more complex trajectory tracking control task using neural network techniques will be considered as part of the future works. Also, the possibility of handling all uncertainties by neural networks and without use of adaptive control will be explored in the future works.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the Doctoral Foundation Program of Shandong Jianzhu University (NO. X18016Z), Major Science and Technology Innovation Project of Shandong Province (2019JZZY020703), Science and Technology Support Plan for Youth Innovation in Universities of Shandong Province(2019KJB014).