
Abstract
In this study, an observer based sliding mode control (SMC) scheme is proposed for vibration suppression of subsonic piezo-composite plate in the presence of time varying measurement delay by using the piezoelectric patch (PZT) actuator. Firstly, the state space form of the subsonic piezo-composite plate model is derived by Hamilton’s principle with the assumed mode method. Then an state observer involving time varying delay is constructed and the sufficient condition of the asymptotic stability is derived by using the Lyapunov-Krasovskii function, descriptor method and linear matrix inequalities (LMIs) for the state estimation error dynamical system. Subsequently, a sliding manifold is constructed on the estimation space. Then an observer-based controller is synthesized by using the SMC theory. The proposed SMC strategy ensures the reachability of the sliding manifold in the state estimate space. Finally, the simulation results are presented to demonstrate that the proposed observer-based controller strategy is effective in active aeroelastic control of subsonic piezo-composite plate involving time varying measurement delay.
Keywords
Introduction
Aeroelastic phenomenon is a kind of harmful vibration, which results from the interaction between aerodynamics, inertial force, and structural dynamics. When experiencing aerodynamic load, flexible structures such as wing, helicopter/wind turbine blade, beam, plate, shell may vibrate strongly, resulting in structural fatigue failure. To suppress the adverse vibrations, various kinds of control theories have been proposed or developed including PID control, 1 robust control,2,3 adaptive control,4,5 sliding mode control,6,7 LQG regulator,8–10 adaptive nonlinear optimal control. 11 Instead of full state measurements or observer design, Singh et al. 12 proposed a feedback controller based on partially available measurements to achieve flutter suppression.
However, in the above studies, time delay (TD) is ignored. In practice, time delay is objective, which may result from data collection system and actuation system. 13 TD may make the controller fail and even cause the aeroelastic system to switch from a stable state to an unstable state.14,15 In Ramesh and Narayanan, 16 the dynamics of a two-dimensional airfoil with a constant TD is investigated by PID control strategy using a single state feedback signal. Yuan et al. 17 focused on the nonlinear dynamical character of a two-dimensional supersonic lifting surface with constant TD. They found that TD has a significant effect on the bifurcating motion. For example, it could transfer subcritical Hopf bifurcations to supercritical. Similarly, Zhao18,19 proved that TD has a huge impact on flutter boundary of the controlled aeroelastic system. Thus, TD should not be ignored in the design of active aeroelastic control system.
Almost all of the above studies are focused on the effect of TD on the dynamic characteristics of the system, few researchers are devoted to the design of active control aeroelastic systems invoving TD. By using the Lyapunov-Krasovskii function, free-weighting matrix and LMIs, Zhao et al.
20
presented
However, all these studies are about 2D airfoil aeroelastic system with wing flap as the control surface. As best as the authors know, there is no literature report on the controller design for the high-dimensional aeroelastic system in the presence of time varying delay. Furthermore, piezoelectric materials can replace the wing flap for sensing and actuating functions, so as to avoid the complexity of mechanical systems and improve system reliability. Inspired from this, the purpose of this study lies in the design of an observer-based sliding mode controller for the vibration suppression of a high-dimensional aeroelastic system with time varying measurement delay, using the piezoelectric actuator.
SMC is a typical variable structure control method, which is famous for its robustness and insensitivity to uncertainty. SMC has been used to achieve the trajectory tracking of nonlinear robotic manipulator under varying loads problem, 23 with uncertainties and external disturbance problem, 24 or with backlash hysteresis problem. 25 An adaptive fractional-order non-singular fast terminal SMC law was designed for a lower-limb exoskeleton system. 26 Using SMC, a hybrid robust tracking control scheme was proposed for an underwater vehicle in dive plane. 27 Researchers have also studied the observer-based SMC for the system with unmeasurable states. A disturbance observer-based super-twisting SMC was proposed for formation maneuvers of multiple robots. 28 An extended state observer-based SMC strategy was proposed for an under-actuated quadcopter UAV. 29 However, the literature concerning observer-based SMC for the aeroelastic system is very few. 30
In our recent work, by using the PZT actuator, we have studied the observer-based SMC scheme for suppressing bending-torsion coupling flutter motions of a wing aeroelastic system with constant time measurement delay. 31 In this paper, the model of the subsonic plate is chosen as the high-dimensional aeroelastic system, and we focus on observer-based controller design for the system with time varying measurement delay. Hamilton’s principle with the assumed mode method is applied to establish the aeroelastic model. Then, by using the Lyapunov-Krasovskii function, descriptor method, an observer is designed and the sufficient condition for the asymptotic stability of the observer is guaranteed in terms of linear matrix inequalities (LMIs). Then, the sliding mode control is employed on the estimation space to achieve the observer-based controller design. Lastly, the controller performance is verified by numerical simulation.
Aeroelastic model and solution methodology
Mathematical model of the piezoelectric plate subjected to subsonic aerodynamics
A uniform simply-supported rectangular plate with piezoelectric patch actuator bonded on its top surface subjected to subsonic aerodynamics is considered. As shown in Figure 1, the plate has thickness
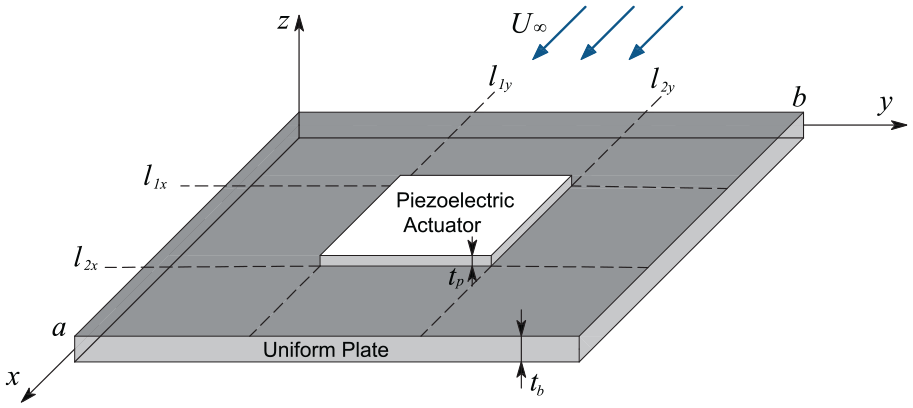
Schematic of the subsonic plate and piezoelectric actuator.
The stress-strain relations of the base plate is presented as follows (refer to page 64 in Jalili 32 ).
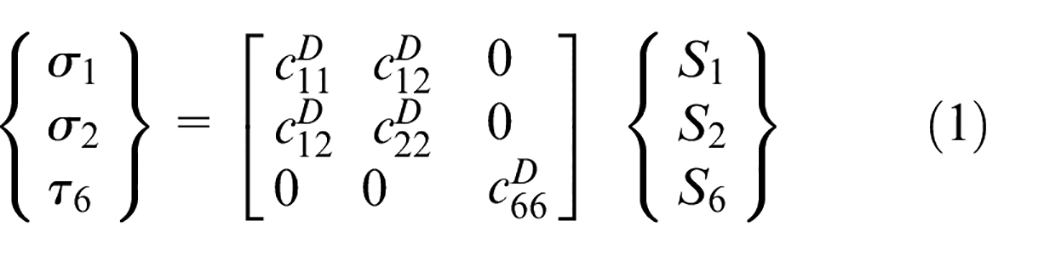
where
It is noted that where the piezoelectric patch is attached (
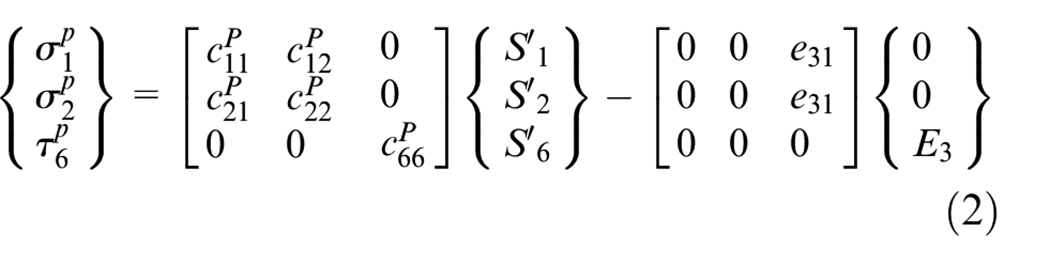
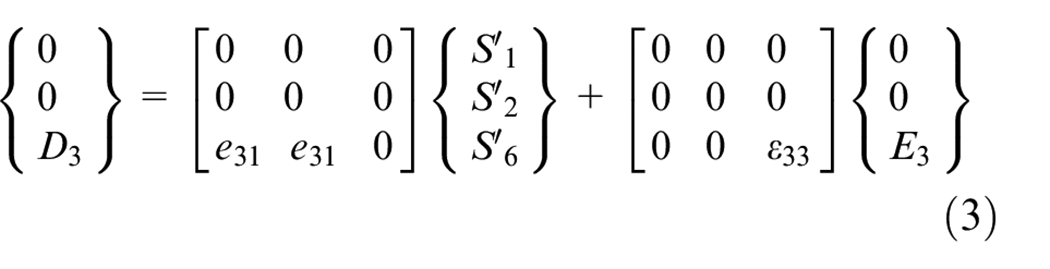
where
The total potential energy can be given as follows
The total kinetic energy can be given by
where

with the piezoelectric/plate section indicator function

and
The virtual work by the aerodynamic pressure can be written as
For low Mach number subsonic flow, the aerodynamic pressure is approximately given by Dowell and Ashley 33
where
Substitute equations (4), (5), and (8) into Hamilton’s principle
where
In order to use the assumed mode method,

where

Define

where
Time-varying delayed output measurement

where
At the end of this section, the following lemmas about matrix inequalities which will be needed in the deduction of our result are introduced:
Lemma 1 (Jensen’s inequality,
34
page 87) For any

Lemma 2 (page 97
34
) Let

the following inequality holds:
Observer-based sliding mode controller design and analysis
Observer design and stability analysis
In this section, an observer-based sliding mode controller is designed, and the sufficient condition for the asymptotic stability of the observer and controller systems are derived in terms of LMIs.
The state observer is constructed of the following form for the delayed output system (14)

where
In view of (13) and (18), define

The following theorem gives the sufficient condition for the asymptotically stability of the state estimation error dynamical system (19).
Theorem 1 If there exist scalar
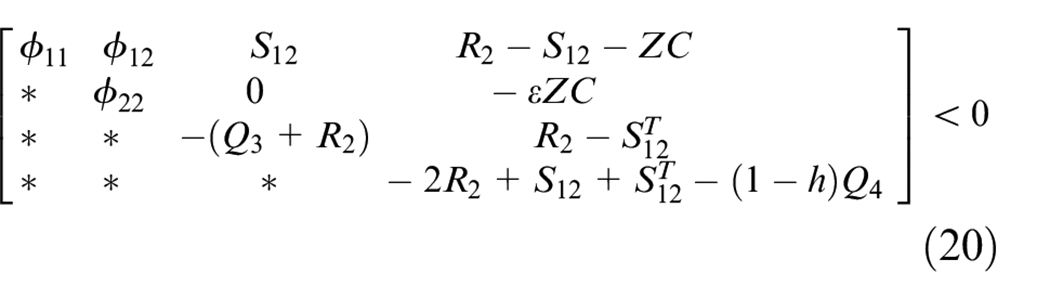
with
And
And * denotes the symmetric terms in a symmetric matrix. then the error dynamical system is asymptotically stable.
Proof 1 Choose the Lyapunov-Krasovskii functional candidate as:
Taking the time derivative, it follows that
By employing the following representation, we have
By lemma 1, applying Jensen’s inequality to both terms in equation (24), we get
In view of equation (25) and lemma 2, we have
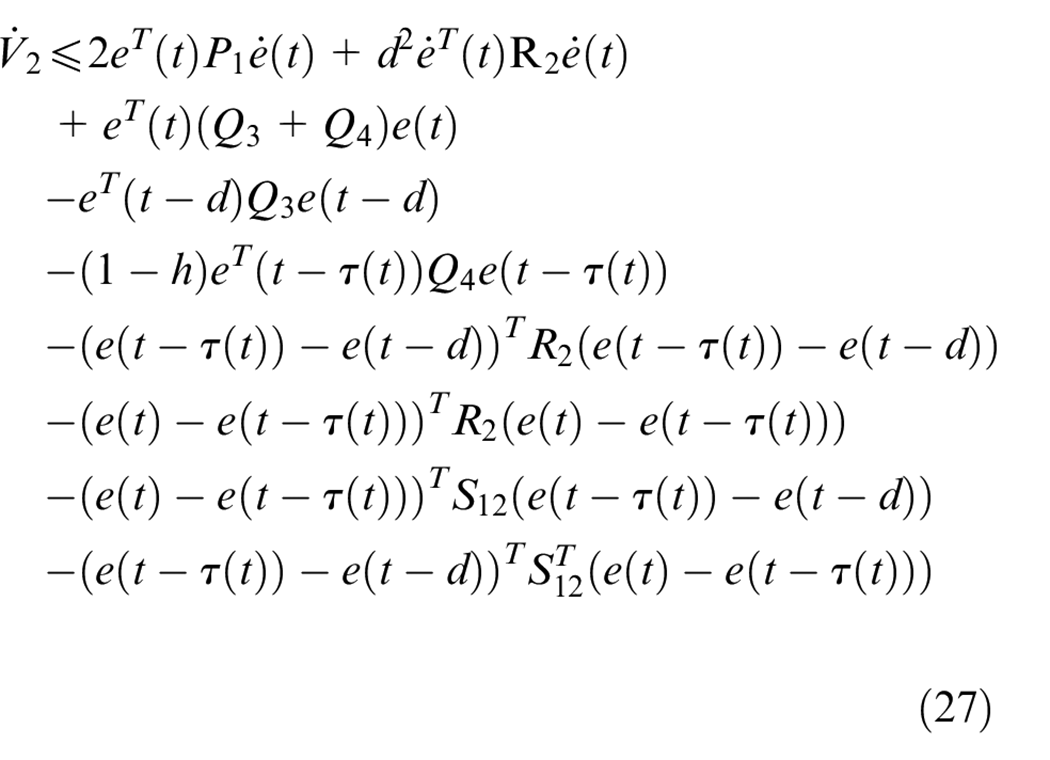
Substitute equation (26) into equation (23), we obtain
Then, by adopting the descriptor method, 34 where the right-hand side of the following expression
with proper dimensions matrices
Define

where
Hence, for
Sliding mode controller design and stability analysis
For the state estimate system (18), a sliding manifold can be constructed as:

where
According sliding mode control theory, setting

Combining the robust term, our proposed terminal sliding mode controller is designed as:
where
Substituting equation (33) into equation (18) yields

The finite time reachability and stability analysis of the sliding mode control has been given in Appendix.
Similar to our previous work,
32
the auxiliary state feedback matrix

where
Numerical simulations
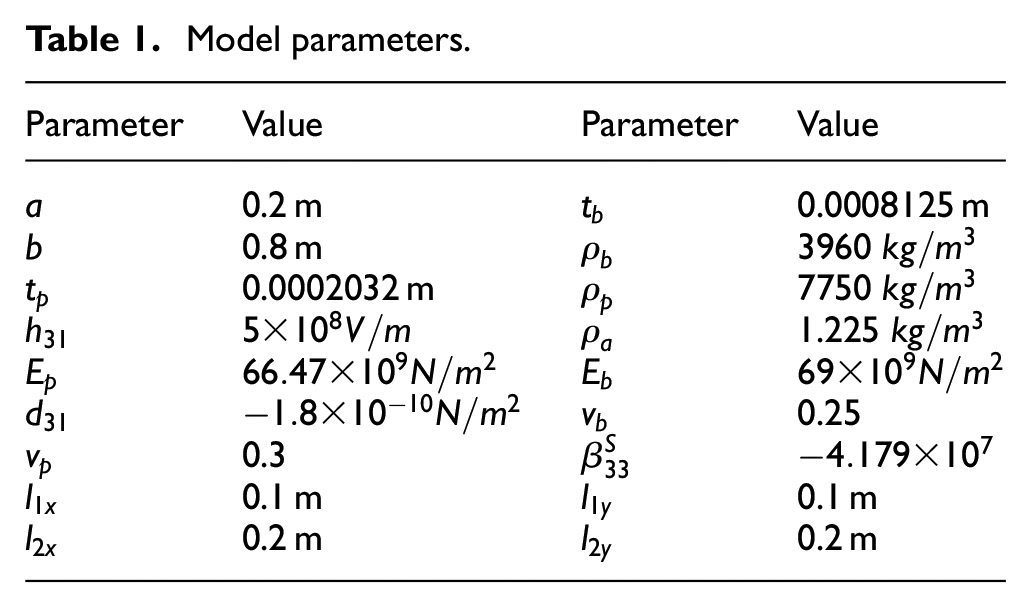
In this section, numerical simulations are carried out to illustrate the effectiveness of our proposed control strategy. The lay-up configuration of the plate and material properties of the piezo-actuator are displayed in Table 1. In the simulation, choose
Model parameters.
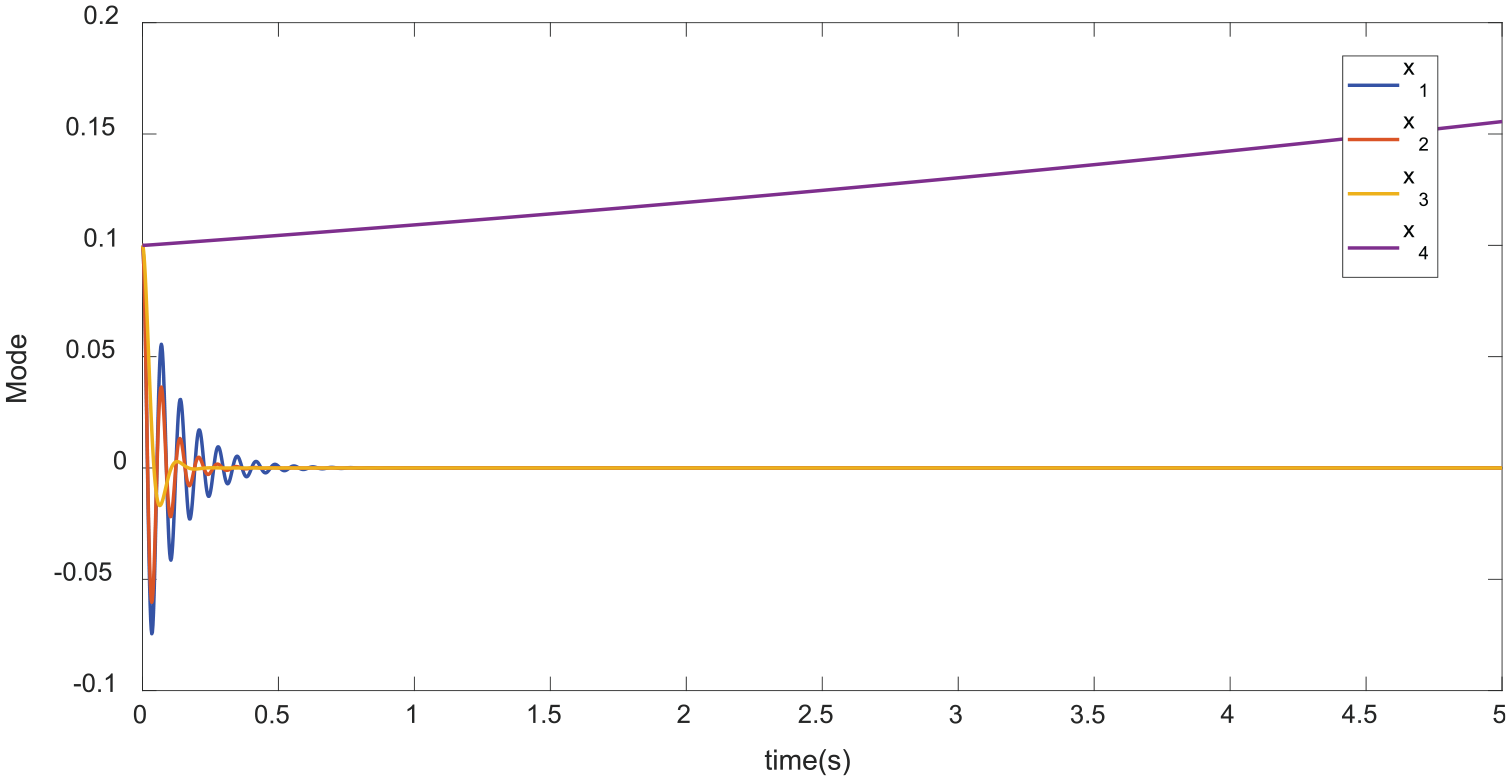
Time history of the mode state variables.
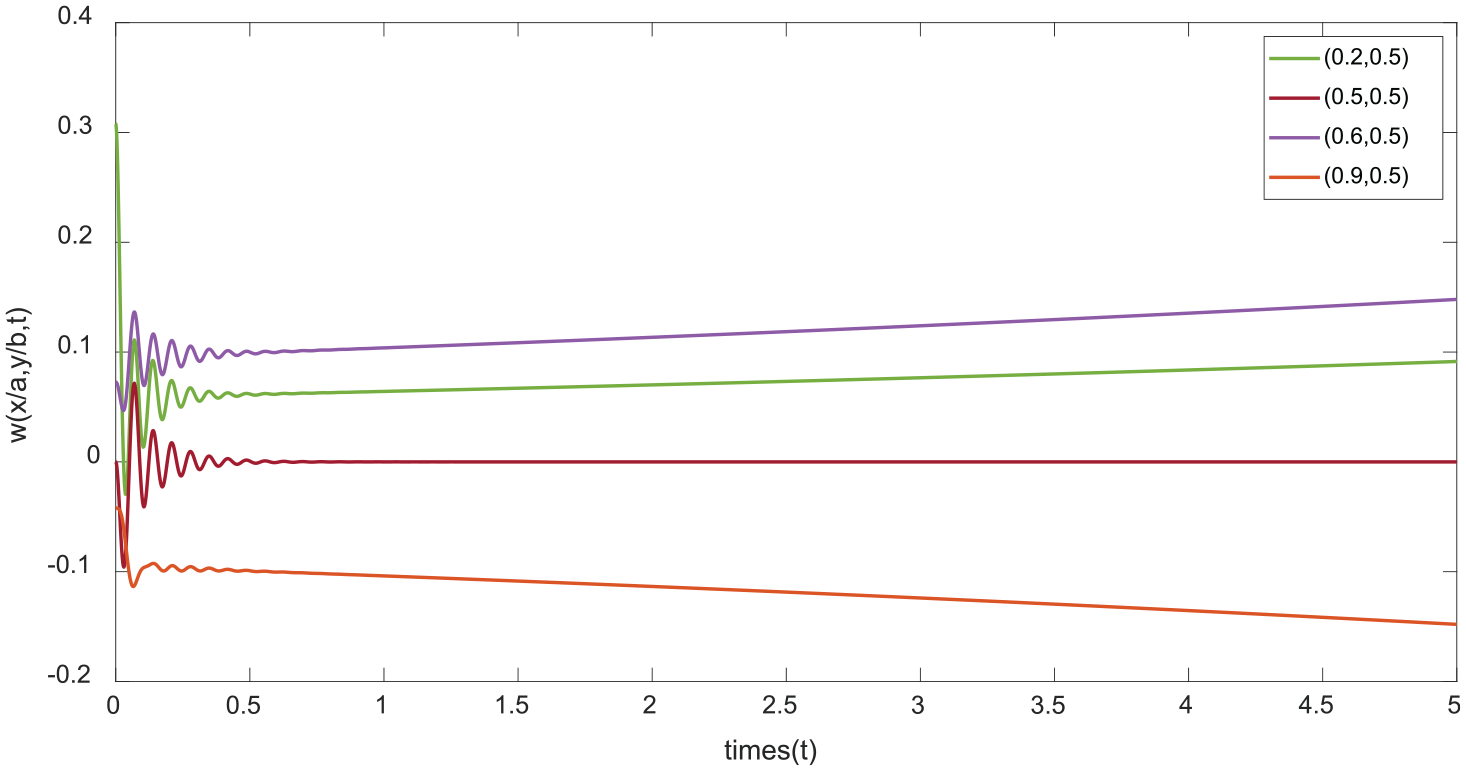
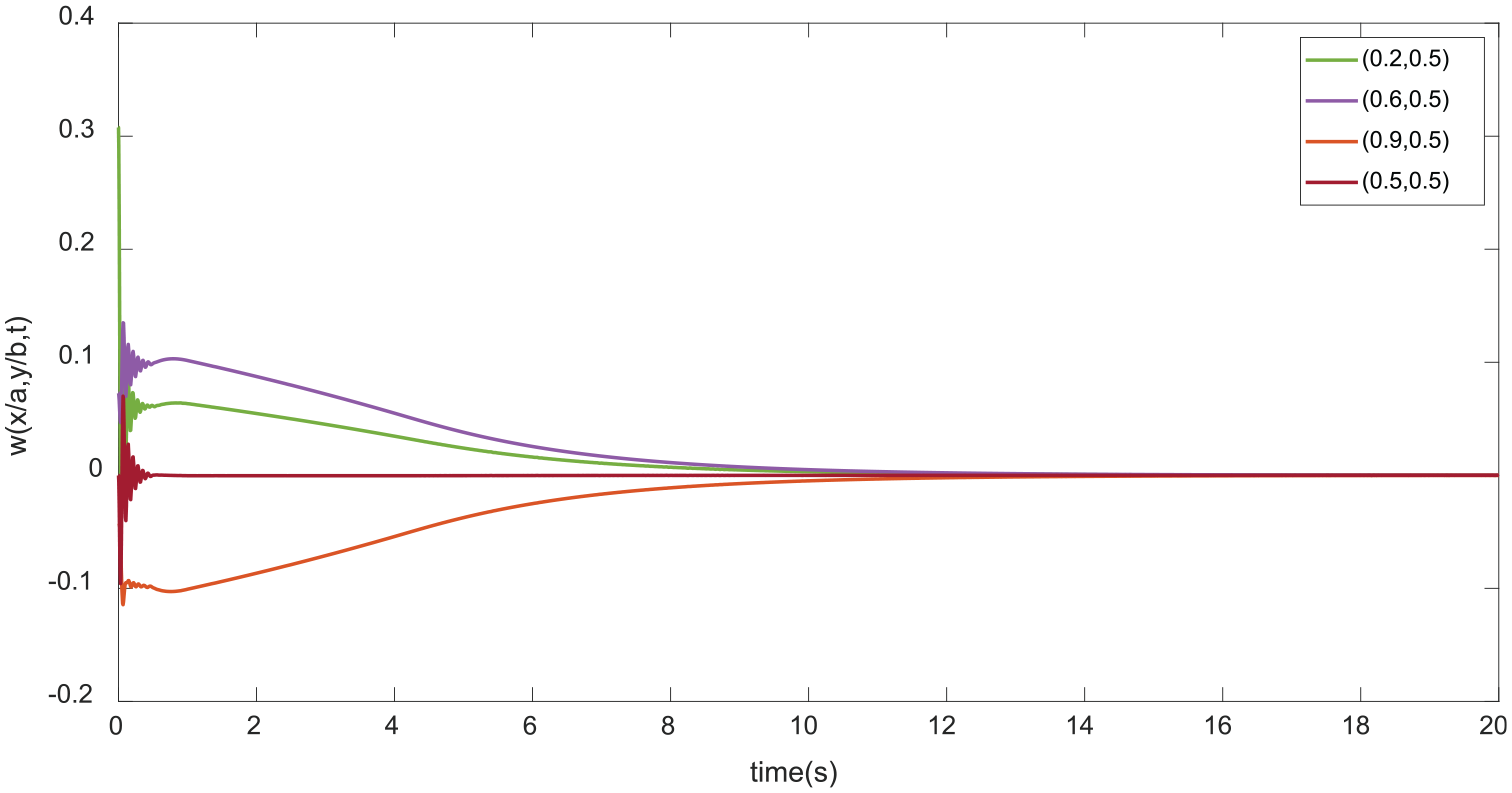
Time history of w(x/a, y/b = 0.5).
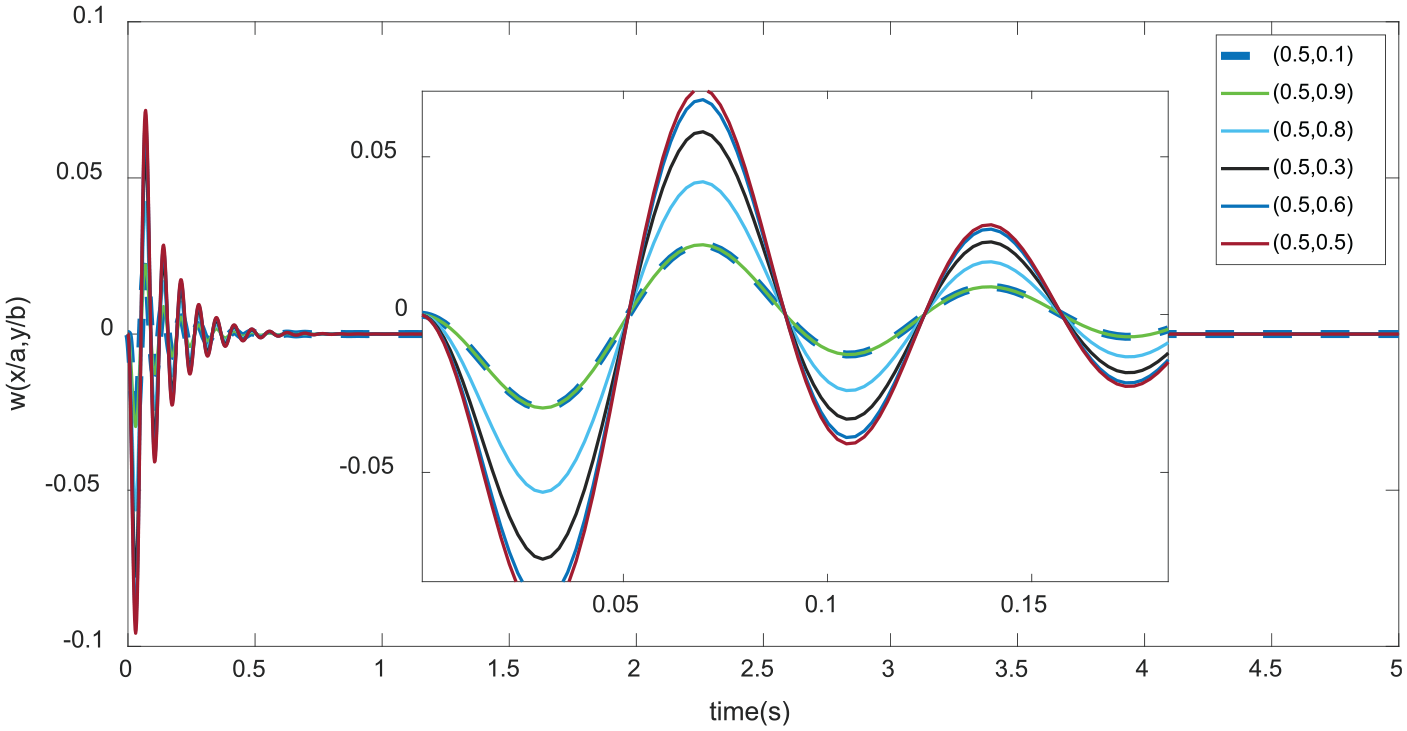
Time history of w(x/a = 0.5, y/b).
To achieve vibration suppression, active control strategies will be implemented. In the closed loop system, Figure 5 shows the time history of the time varying measurement delay
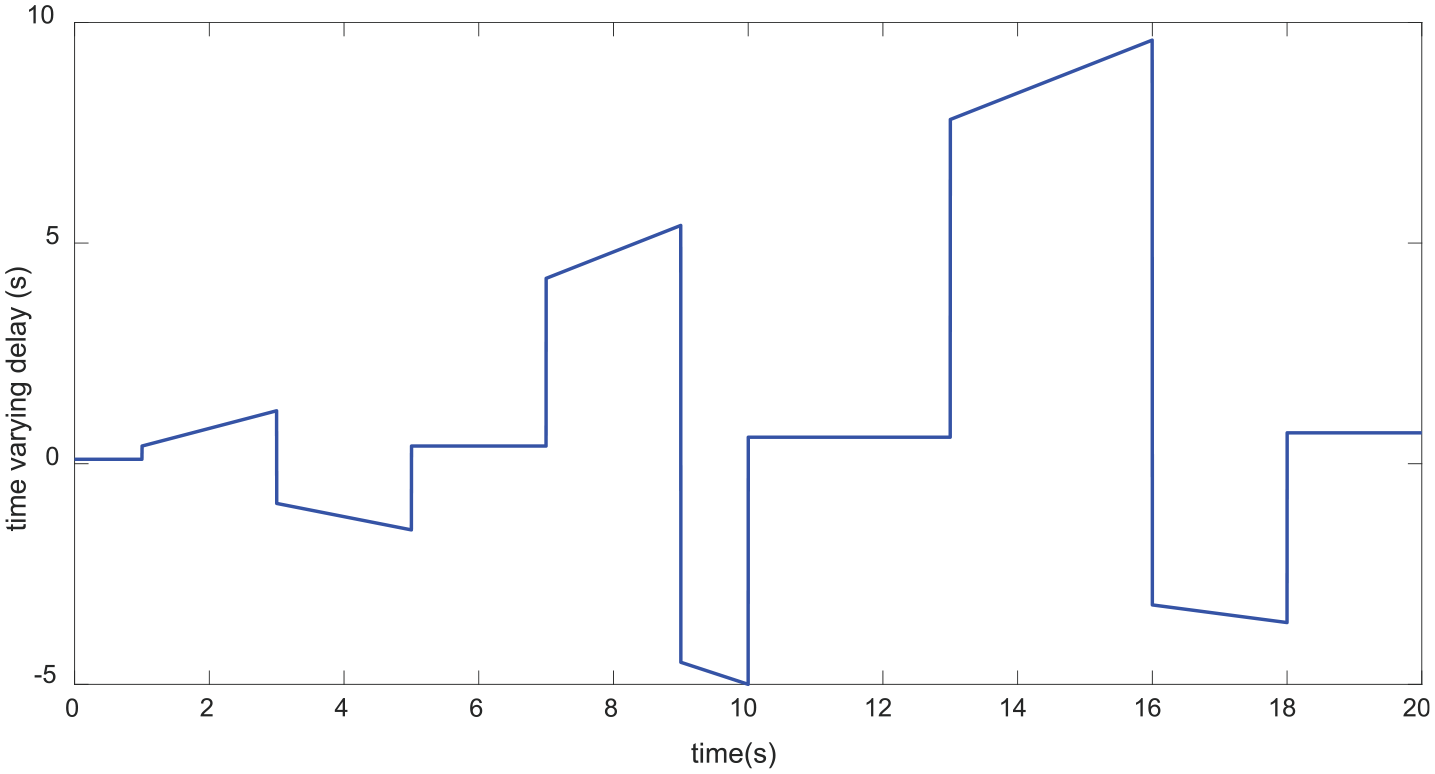
Time varying delay.
Furthermore, an LMI-based control method is used as a comparative study.
35
(Remark: for clarity, we only drew the result curves with obvious differences.) Figures 6 and 7 shows the simulation results of the closed loop system. From these figures, it’s shown that all of the system states can be stabilized in finite time, and all of their estimates can track their true values from the beginning. The settling time of mode state variables
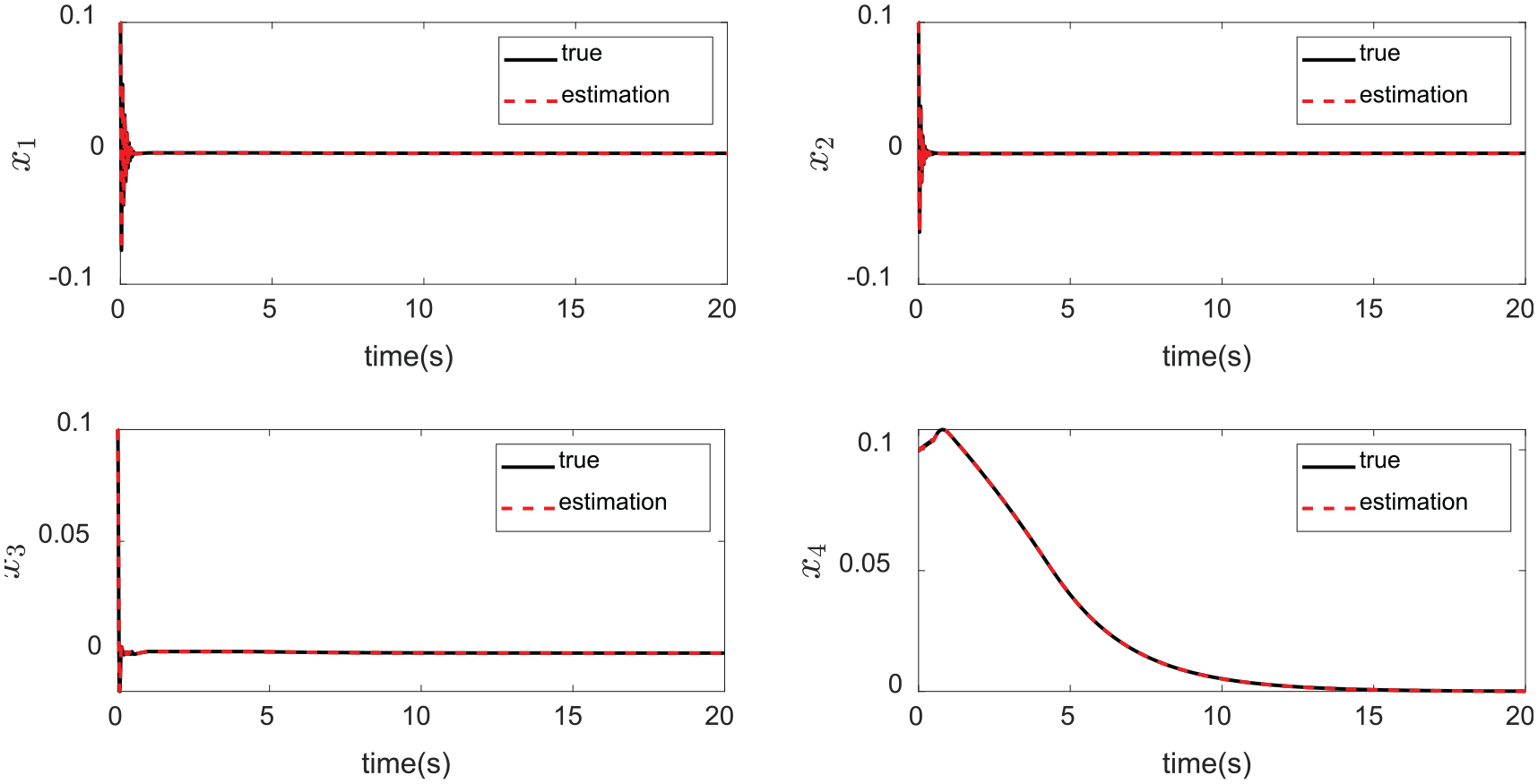
system states
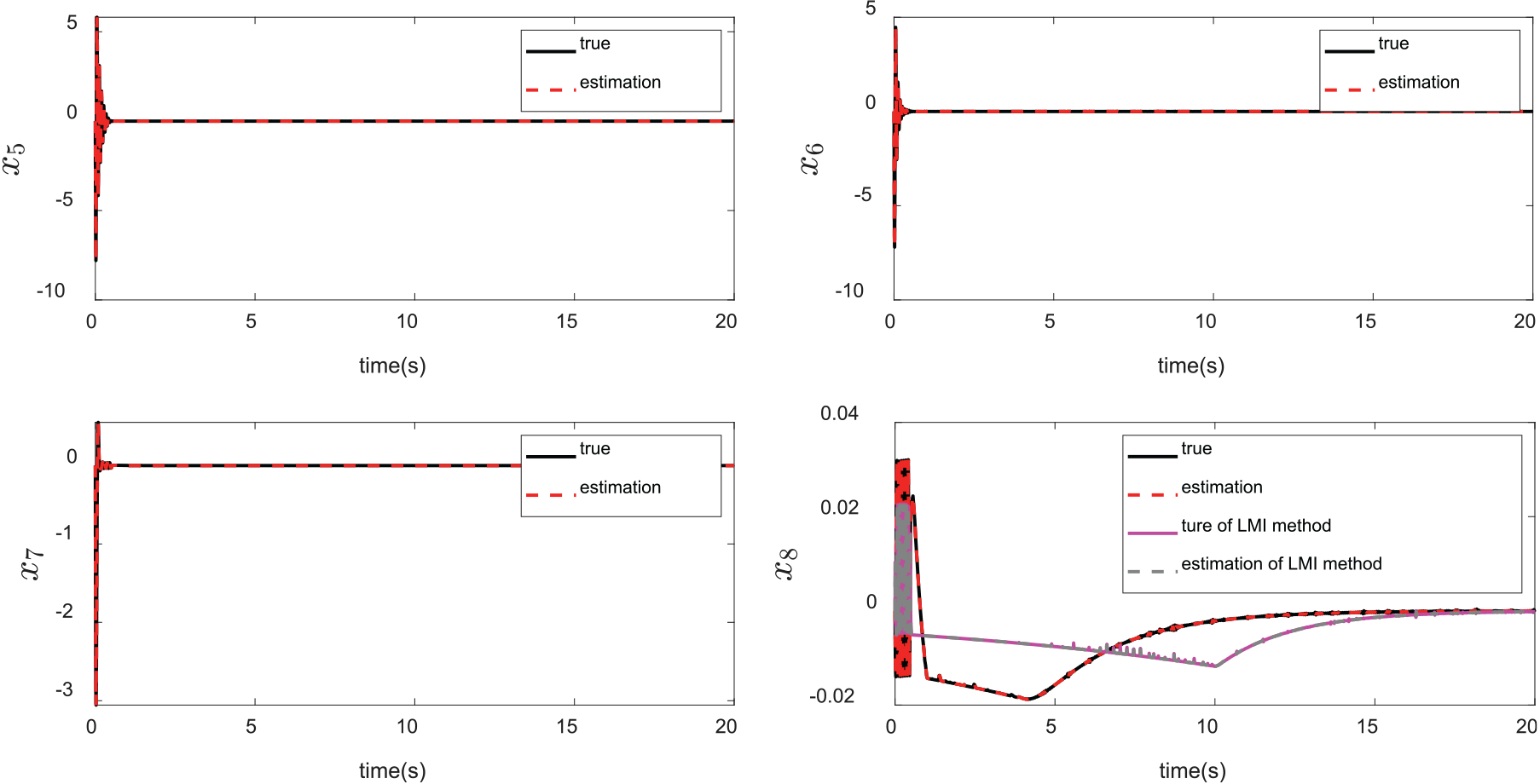
system states
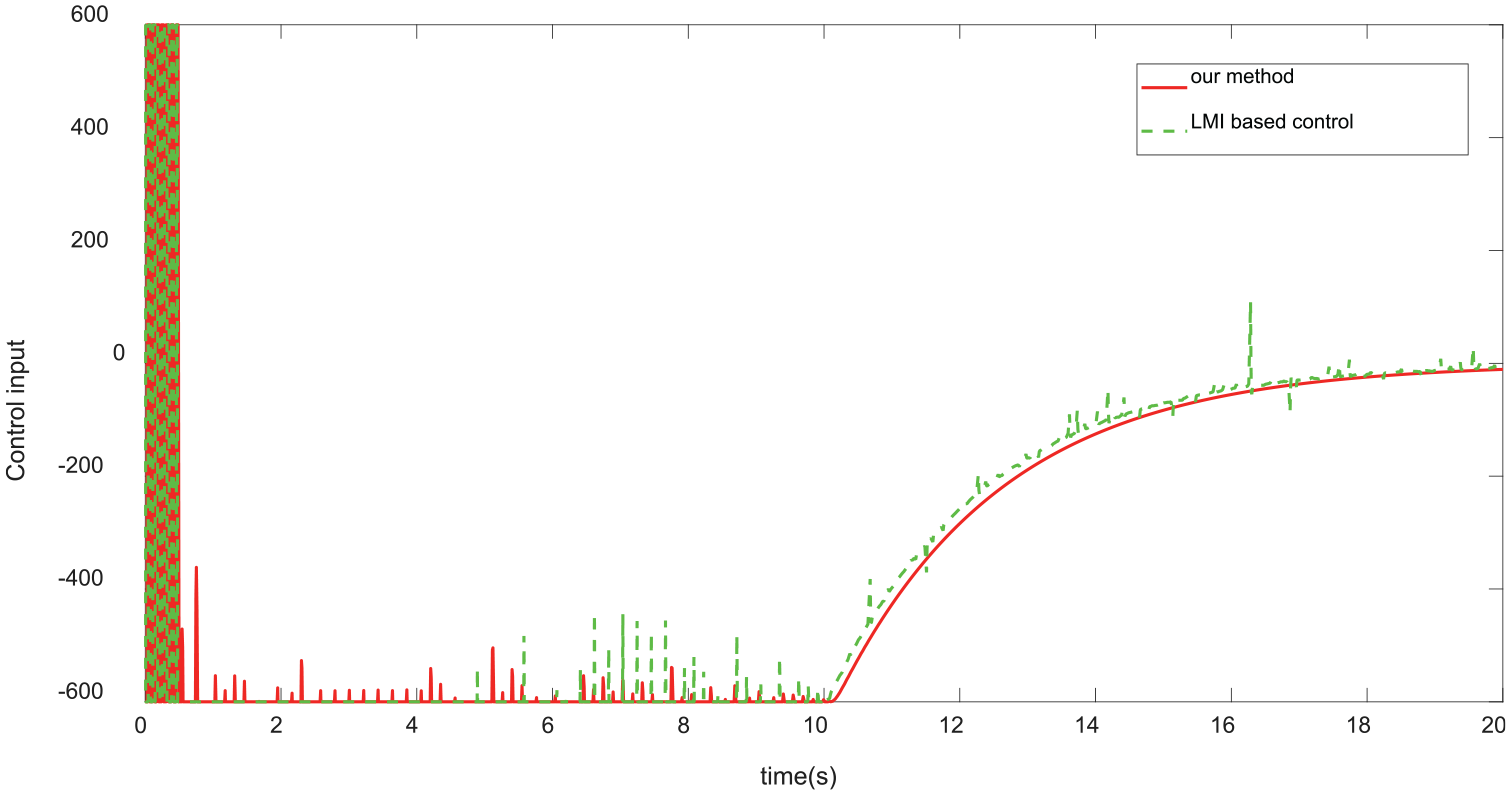
Control input
time history of
Conclusion
In this article, an observer based sliding mode controller was proposed for active aeroelastic control of subsonic piezo-composite plate subject to time varying measurement delay. The piezoelectric patch was bonded on the top surface of the plate as an actuator. Making using of simplified unsteady aerodynamics and adopting the two-dimensional piezoelectric actuation theory, the coupled dynamical model of the aeroelastic system has been formulated by means of Hamiltons principle with assumed mode method. The instability bound has been calculated by solving the system eigenvalues. The vibration responses at different coordinates are investigated. To achieve vibration suppression, the observer based sliding mode controller was designed, and the corresponding gain matrices are obtained by solving the LMIs. The asymptotic convergence was guaranteed by Lyapunov stability theory. The major conclusions can be drawn as follows
In the open loop system, the vibration response depends on both
The proposed observer based sliding mode controller is effective to eliminate unstable response and stabilize the system in finite time.
The results presented in this article indicate that our proposed control strategy can effectively deal with active aeroelastic control of subsonic piezo-composite plate problem with time varying measurement delay.
Footnotes
Appendix
Reachability and Stability Analysis
the state trajectories of the estimate space will reach the sliding surface
Proof 2 Right multiply equation (36) by
On the other hand,
The right hand side of equation (38) and equation (39) are equal, then we can obtain
From simple calculation, one can get
Integral equation (41) from
Proof 3 Choose the Lyapunov functional candidate as
From equation (31) and equation (32), the derivative of equation (43) is given by
Since
Combing the above two theorems, it can be concluded that the state trajectories of the estimate space will be driven onto the switching surface
Authors’ Note
Na Qi is also affiliated with KeiHin Electronic Device Research and Development (Shanghai) Co., Ltd.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.