
Abstract
Centrifugal Compressors (CCs) are widely used equipment to transport the natural gas over long-distance pipelines from the gas processing facility to end consumers. Surge protection is of vital importance for such compressors to avoid costly damage to machine and production loss due to process interruption. In this paper, the dynamic behaviour of CCs has been studied during four critical scenarios: high header pressure, low suction pressure, startup of the new unit, and emergency shutdown of the unit. The dynamic simulation has been carried out using HYSYS software and validated with an industrial scale CC plant. The advanced Anti-Surge Control (ASC) consists of a split PID control in contrast to conventional PID control. The simulation results demonstrate the superior performance of advanced ASC over a conventional one for the severe surge in the event of high header pressure and low suction pressure. The occurrence of surge during start-up and the emergency shutdown was handled with the full open operation of the Anti-Surge Valve (ASV). The proposed algorithm has proved successful in protecting the compressor during fast transients of the operating point towards the surge limit line. The study is significant for the oil and gas plants and other process industry professionals for designing effective ASC systems.
Keywords
Introduction
Surge phenomenon in centrifugal compressors
The pressure of the natural gas is needed to be raised to transport from remote wellhead places to the industrial and commercial regions through pipelines. Centrifugal Compressors (CCs) are used for these applications to raise the pressure in the gas extraction and processing facility. The gas compression facility comprises gas coolers, piping, scrubbers, prime mover unit, and control valves. 1 The dust particles are filtered and removed from the gas initially. After the dust filtration, the moisture and water droplets are removed by the scrubbers, taking into account the safety against the water inflow to the compressor. The high temperature compressed gas is then cooled to a lower temperature with the help of coolers. The compressed gas is recycled back to the suction of the compressor by the Anti Surge Valve (ASV) to prevent surge.
Surge is an inherent phenomenon in CCs which can cause severe damage to it. It is defined as the reversal of fluid flow. The lowest amount of flow is taken place at the surging conditions and the compressor peak head capacity is attained. A rigorous amount of oscillations in discharge pressure and flow are produced generating huge vibrations and massive noise. As a result, system stability is compromised and costly damage to the machinery happens. During the surge, flow is separated within the impellers, which reverses the direction and makes the fluid unsteady. For the surge prevention and maintaining a secure operational flow in compressors, the anti-surge control system is introduced. 2 The surge profile in the time domain is shown in Figure 1 where the flow is reversed periodically causing the rapid change in pressure.
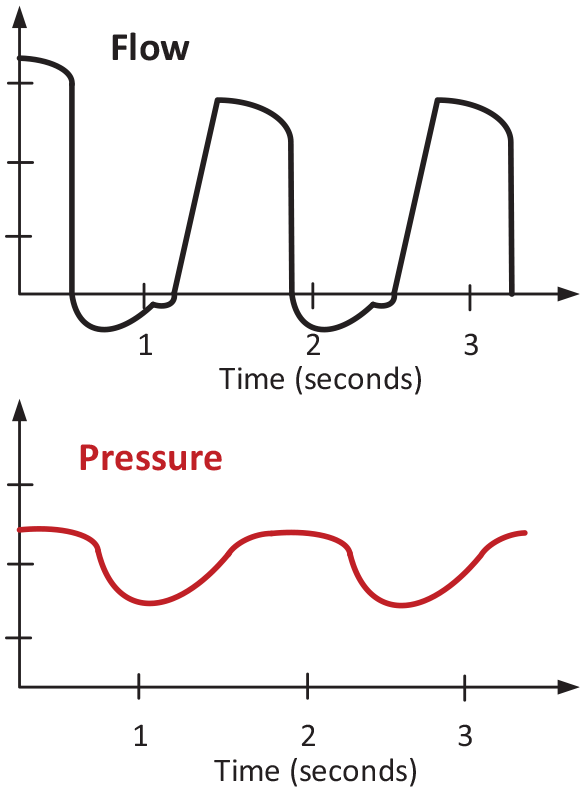
Time domain profile of flow and pressure in surge conditions.
The compressor working condition is determined by its map as shown in Figure 2 in which the lower and higher flow limits are phrased as surge and choke limits respectively. Surge limit and choke lines are two extreme flow conditions. Surge occurs if the surge limit line is crossed in low flow conditions. If the choke limit is exceeded at the given speed, the flow achieves the sonic speed and an increase in the flow cannot be attained further. Between the mentioned limits, the flow is designated to be stable 3 and is recommended for compressor operation.
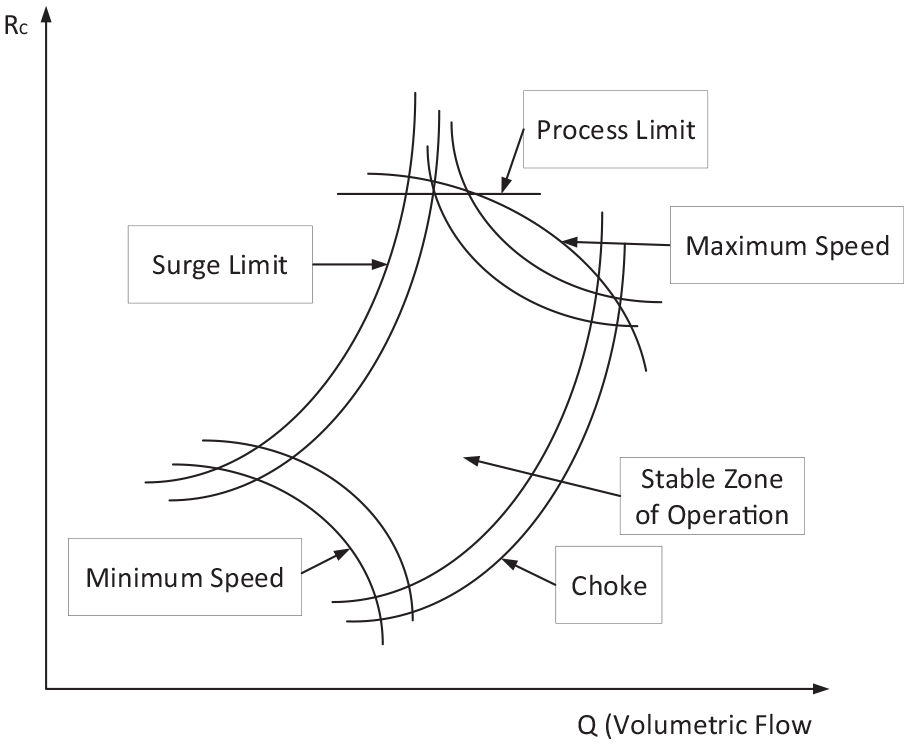
Compressor map.
A control action is required to avoid and remove the surge out of the compressor, as it is a cyclic phenomenon and repeats itself. An entire surge cycle can be seen in Figure 3 representing the reversal of flow and its recovery. This phenomenon occurs at a very high speed that is, it can take less than 150 ms for flow reversals. The surge intensity is varied in different applications and is directly related to the fluid density.1–3
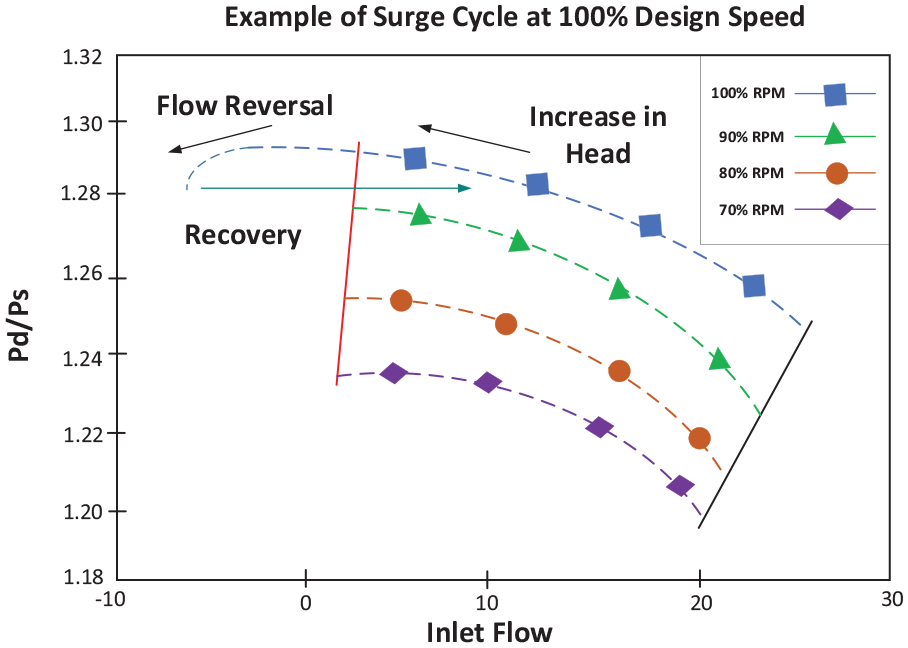
Surge cycle.
The surge is normally caused during the start-up of the unit when the immediate discharge pressure of the compressor is less than the header pressure until it becomes greater than the header pressure to produce forward flow. The other condition is of high header pressure caused by the cutting off of the consumption of gas by customer instigating flow curtailment. Another frequent surge condition is low suction pressure that is caused by cutting off of the gas-producing wells due to faults in these. Surge also occurs during the emergency shutdown of the unit when a critical fault in the control system or prime mover such as a gas turbine has occurred. Some other causes of surge include Inlet valve failure, human error in plant operations, and outlet valve failure.1–3
Anti-surge control system
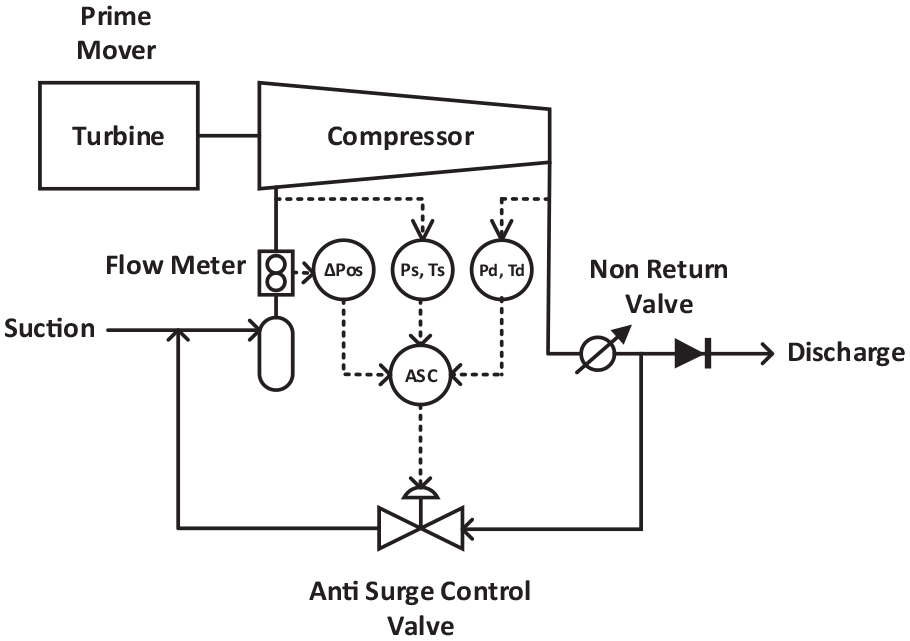
It prevents the surge in CCs by opening the ASV quite effectively and quickly. A typical implementation of ASC in a local gas station compressor is shown in Figure 4.
ASC model for CC.
A complete ASC consists of the following components:
Effective prevention against the surge is achieved by sustaining the lowest amount of flow just over from fixed margin making sure of the compressor to be operated in a stable region. Usually, the lowest amount of flow is assigned at 110% of the surge line flow, without varying the ratio of pressure. The procedure is done using valves either for recycle in the discharge process, or to run blow-off at the compressor line of discharge. Recycle valve is preferred over blow-off to avoid waste of expensive fluid. Recycling is done by an electronic/analogue signal of 4–20 mA operating control valve termed as ASV.1–3
A PID controller is the most popular feedback control system in the process industry. Its equation is generally written as follows: 4

Where OP(t) is the output of controller at time t, Kc is the gain of proportional, E(t) is the error at ‘t’ time, Td is the derivative rate and Ti is the integral (reset) time. The proportional action is the current response according to the error signal, the integral is the history response and the derivative is the anticipator response. The derivative action is normally not used in flow applications due to the hunting problems in actuators because of sudden variations of error signal due to a varying process variable. However, in our application, this action would be necessary to quickly open the valve in severe surge conditions. 4
A severe surge is a condition that is caused in very less time causing the rapid movement of the compressor map Operating Point (OP) to the left of the safety lines. The severe surge can only be prevented by the rapid opening of the ASV which is possible with high derivative action termed as Recycle Trip Line (RTL) response. The derivative action will not be used for the closing of the ASV to avoid hunting and forcing the compressor to go in the surge zone by limiting recycling. This forms the basis for split PI+D response in which the derivative response will be used only for the opening of the ASV in severe surging conditions.
Various conventional and advanced methods have been reported in the literature for the design of the ASC system. The conventional control system for the surge avoidance uses the compressor map as the reference for the control involving pressure, temperature, and volumetric flow as used by. 5 In Yoon et al., 6 the tracking of magnetic controlled bearings is done using the active surge controller. The signal to noise ratio highly affects this system. During the surge, the system vibration is enhanced hence considered as the key parameter around which the controller revolves.7,8 In Cortinovis et al., 9 variable frequency drives with advanced torque control are being used to control the surge.
In the advanced methods, such as in Bentaleb et al. 10 Multivariable predictive control is being used to avoid the surge with the help of discharge pressure regulation and observing the pipeline noises and variations. In Uddin and Gravdahl, 11 a linear quadratic regulator with double integral control is implemented for the piston control ASC. In Torrisi et al., 12 the surge avoidance system is designed using the model predictive control technique as one of the modern control systems. In Refs.13,14 fuzzy logic control has been implemented to avoid the surge using compressor output information for the decision making, hence the model becomes self-predictive. In Dominic et al, 15 the surge controller is designed using a programmable logic controller with compressor map based and flatness-based feedforward control. In paper, 16 a robust control based on the backstepping approach was presented using the wavelet neural network approach. A Lyapunov based adaptive surge control method was proposed in Zhang and Malekgoudarzi 17 in the presence of uncertainties. The literature review reveals that various advanced control techniques were mostly based on model predictive, neural network, and fuzzy logic control. These techniques had disadvantages of high complexity, high computational cost requiring sophisticated dedicated high-speed controllers, and high maintenance and troubleshooting cost. Therefore, a relatively simple but effective and faster technique is necessary to be implementable in the market available programmable controllers for the industry.
In this paper, our contribution is the study of CCs behaviour during four critical scenarios: high header pressure due to cut off of gas supply from the customer side, low suction pressure due to cut off of gas-producing wells, startup of the new units to integrate with other parallel trains and emergency shutdown of the unit in case of a fault in the unit. The performance of conventional PID based ASC and its limitation in severe surging conditions in shorter time are elaborated. The limitations are covered with the advanced ASC system using a split PI+D response with greater derivative response used for the opening of the ASV. The startup and shutdown of the units are better controlled by the fully open operation of the ASV. The work presented is an extension of the previous study 18 and is not found in the literature with such details up to our best knowledge. The proposed algorithm has proved successful in protecting the compressor during fast transients of the operating point towards the surge limit line. The study is very much significant for the oil and gas plants and other process industry professionals for designing ASC systems as CCs are widely used in such plants.
Further contents of the paper are organised as follows: research methodology is described in section 2, software model validation is discussed in section 3, results and discussions are explained in section 4 and the conclusion of the paper is described in section 5.
Research methodology
The working of the advanced ASC has been elaborated by the flowchart shown in Figure 5.
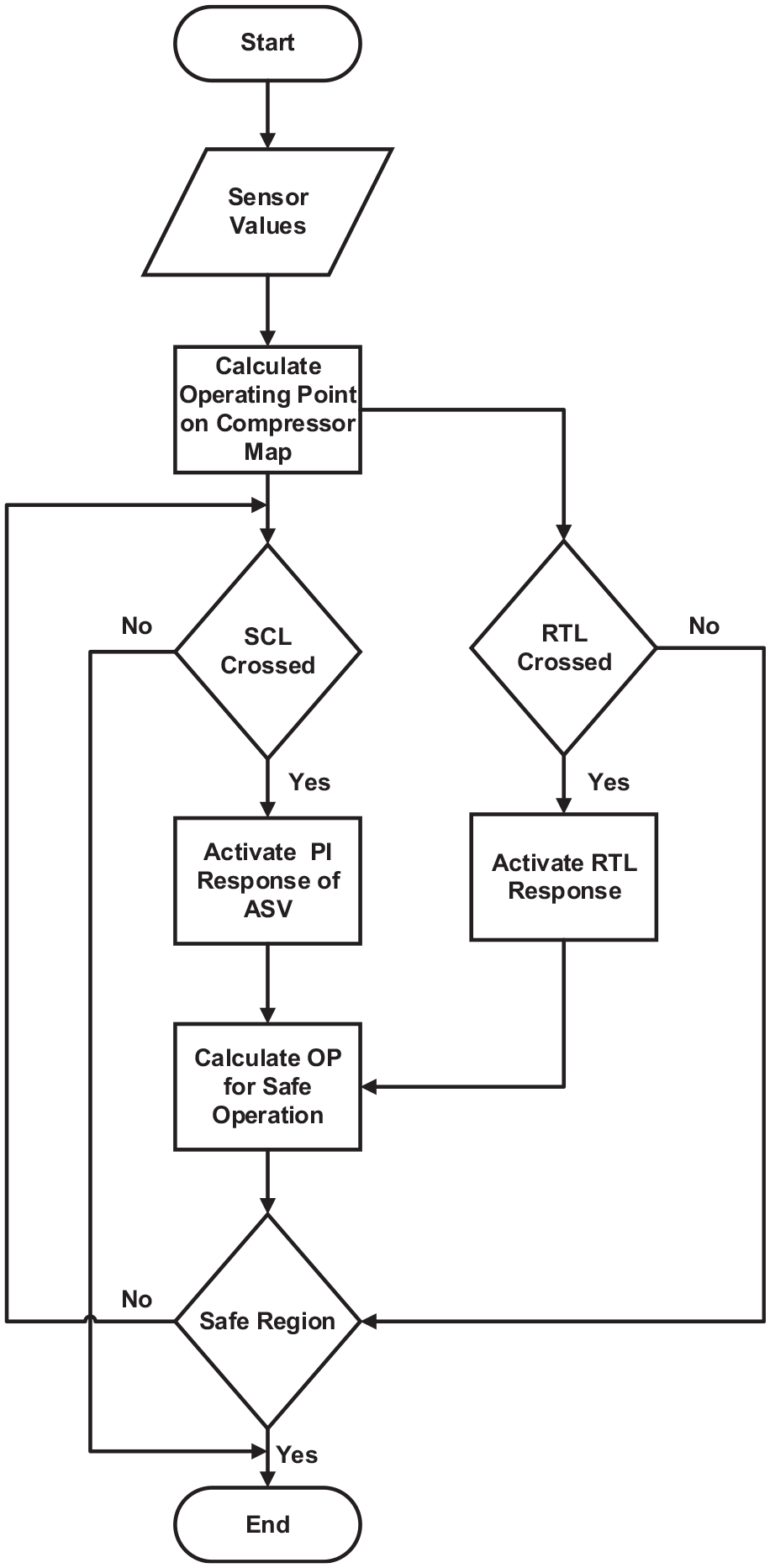
Flowchart of advanced ASC algorithm.
In this control approach, two lines are introduced to the right of Surge Limit Line (SLL): Surge Control Line (SCL) and Recycle Trip Line (RTL) as shown in Figure 6. SCL has been set at 10% margin from SLL and RTL is set to 5% from SCL.5,19 In normal and slow low flow conditions, when the operating point crosses the SCL, a PI response is activated by the controller to open the ASV. In the fast low flow conditions in which the OP suddenly crosses the SCL, the PI response alone cannot protect the compressor from the surge. Therefore, RTL has been introduced to generate an open-loop response of greater magnitude for the additional opening of ASV depending upon the rate of change or speed of the OP that is, derivative action. The RTL response magnitude equals the derivative of the ‘Ss’ Surge parameter. It can also be described as the change in rate is directly proportional to the magnitude of the step response.
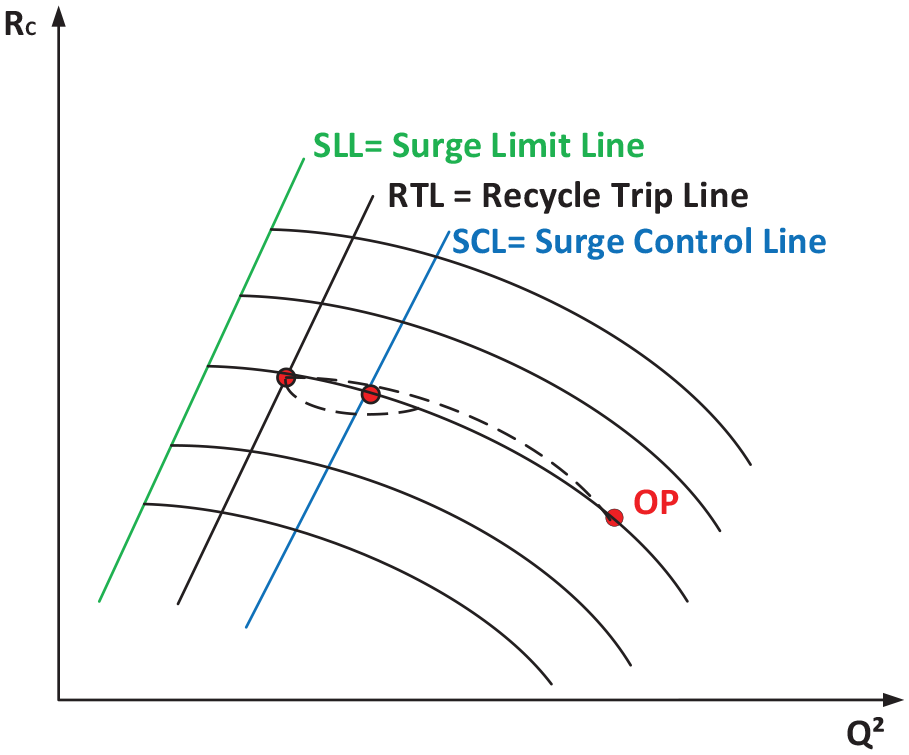
Graphical representation for SCL and RTL.
The split PID control action can be seen in Figure 7.
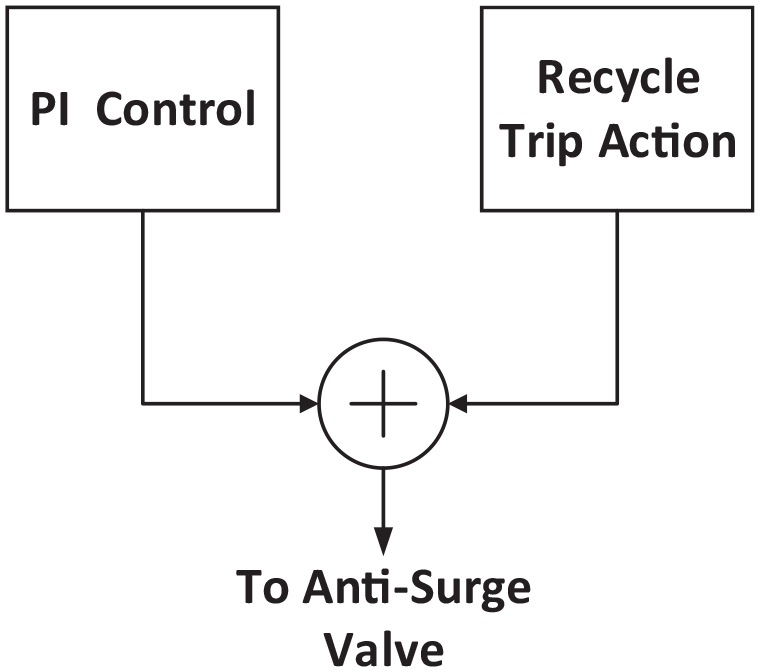
Split PID control (PI + RTL) response for ASV.
The final response is calculated by adding the response of PI control and the response of Recycle Trip, which can be seen in Figure 8.
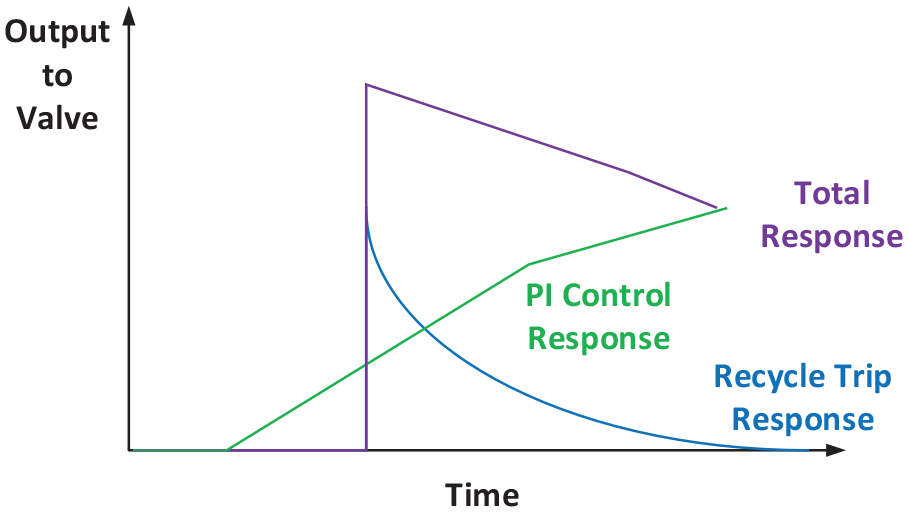
ASC output response to ASV.
Multiple parameters, on which the surge point depends, are the compressor flow and molecular weight. A coordinate system is used for the demonstration of the surge line and gives an advantage due to the invariance property for the inlet conditions. To satisfy the desired conditions, many possible coordinate systems can be used. The reduced polytrophic head is mainly used against the square of the flow rate of the reduced suction.19,20
The pressure ratio of compressor ‘Rc’ can be described next:

‘Ps’ is the suction pressure and ‘Pd’ is the discharge pressure of the compressor. Polytrophic head exponent can be expressed as follows:

‘Ts’ and ‘Td’ are suction and discharge temperatures of the compressor respectively. ‘hr’, the reduced pressure head adds in both pressure and temperature. The complete list of abbreviations and symbols with denotations are mentioned in Appendix Tables A.1 and A.2. It can be written as below:

Due to simplicity and accuracy, many industries are using orifice type flow meter in different applications to measure the flow. For this algorithm, the term (qr2) reduced flow is employed that is the ratio between differential pressure (ΔPos) of the orifice plate and (Ps) suction pressure, received from the flow transmitter and suction pressure transmitter respectively.

The ratio of flow of SLL at the current flow of OP and flow value of OP is said to be Surge Parameter (Ss), calculations can be seen in Figure 9. The parameters for stable and unstable zones are also described below.

Deviation Parameter (DEV) is calculated below:


For safety, a 10% extra margin is the surge margin. Surge margin calculation can be seen in Figure 10.
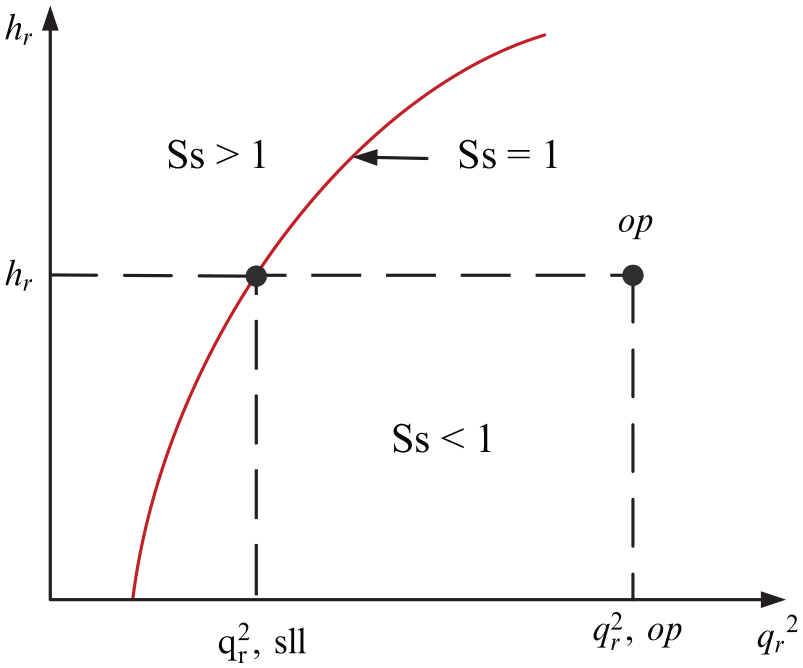
Calculation of surge parameter (Ss).
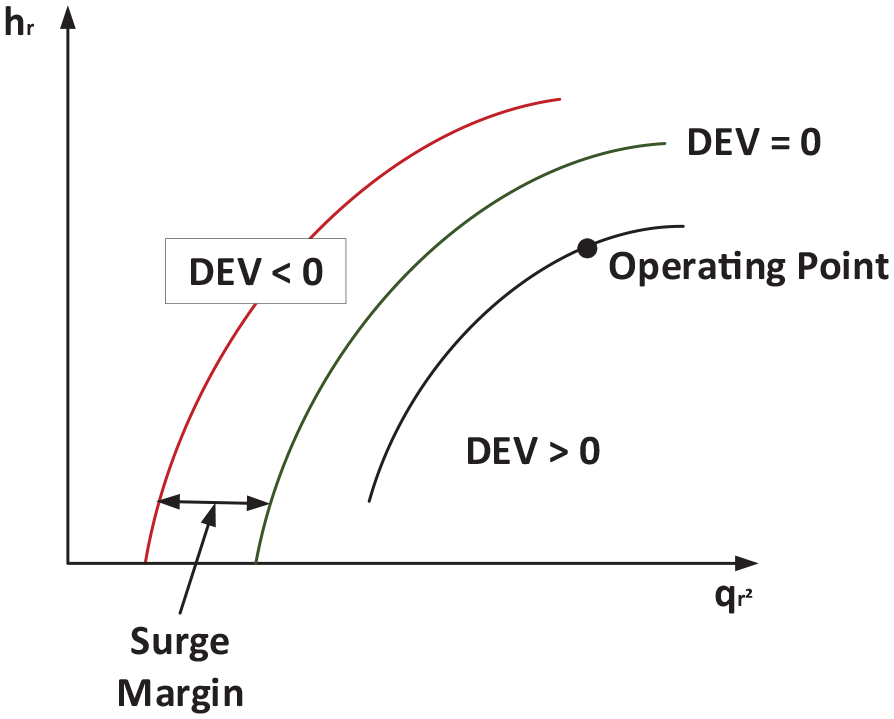
Calculation for deviation parameter (DEV).
Therefore, the algorithm will calculate DEV and Ss parameters and keep these in limits by operating ASV with a split PI+D response.
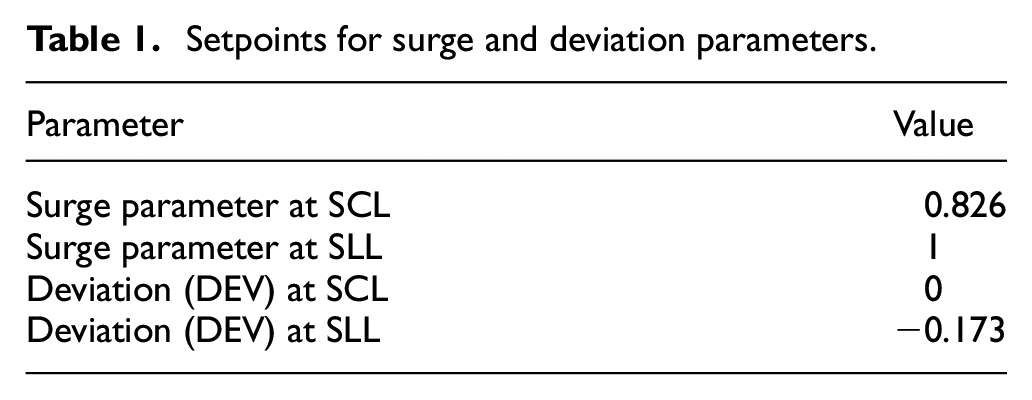
The composition of the gas is taken to be invariable for this simulation, and CC speed is assumed constant for the simulation that is 6650 rpm the minimum speed of the governor. The surge parameter safe range lies below 1 and DEV safe range exceeds the value –0.173 as shown in Table 1.
Setpoints for surge and deviation parameters.
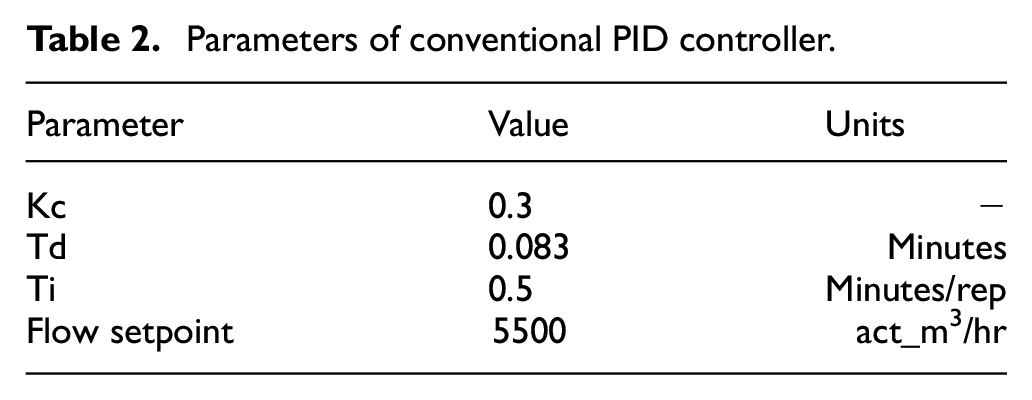
The parameters for the conventional PID controller and advanced split PI+D controllers are summarised in Tables 2 and 3. The controllers were tunned using HYSYS built-in tuning feature to obtain optimum values of gains. 21
Parameters of conventional PID controller.
Parameters of advanced split PI+D controller.
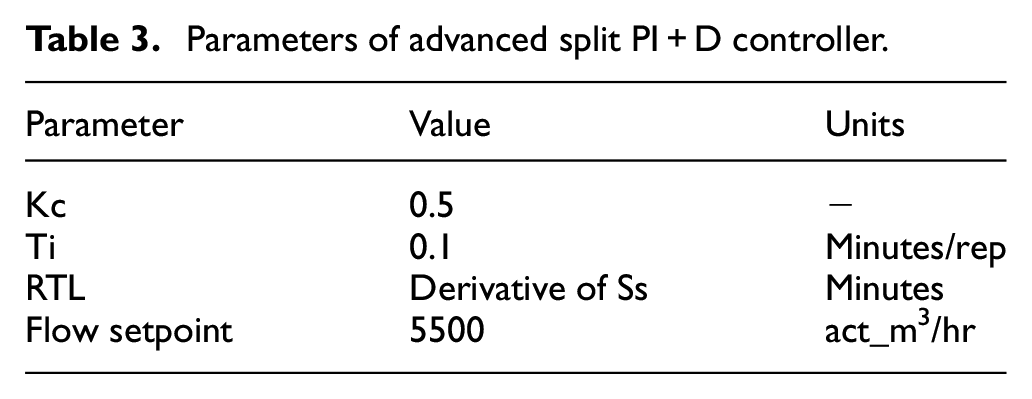
The derivative action time is kept small to avoid the hunting problem of the actuator in the conventional PID controller as this derivative will also contribute to the closing of ASV. The abrupt closing of ASV can also lead the compressor to surge zone by eliminating the recycling flow. However, this action is much larger in the advanced PI+D controller for just opening of ASV and determined by the derivative of the surge parameter that is, faster the OP response, faster will be the controller response to quickly open the ASV. The derivative part in the conventional PID controller cannot be increased much as it affects the closing of the well too and drives the compressor into an unwanted surge in case of sudden variations of flow as per load demand. The derivative action is, therefore, split from the PI controller to affect only the opening of the ASV and does affect its closing. The proposed controller was tested to be robust for the entire range of parameter variations within the given known bounds.
RTL relies on the change in the rate of surge parameter (10% finest set for the current simulation). If this limit is exceeded then it can produce an unbalanced reaction causing damage in ASV and blow this limit system quick response is denied and there is no effective protection left due to slow response.
The assumptions of the study include zero time delay in the communication and operation of sensors, controller, and actuators. Practically, a certain time delay occurs in the communication and components operation such as actuator opening or closing. The gas composition is also assumed to be constant. The limitation of the study is that only a single speed for the compressor operation with the proposed advanced controller has been considered.
Model validation
HYSYS was used for the dynamic simulations of the CC with the proposed advanced ASC system, as shown in Figure 11. Simulations were done for different surge conditions that is, high header pressure, low suction pressure, emergency shutdown, and start-up of the unit.
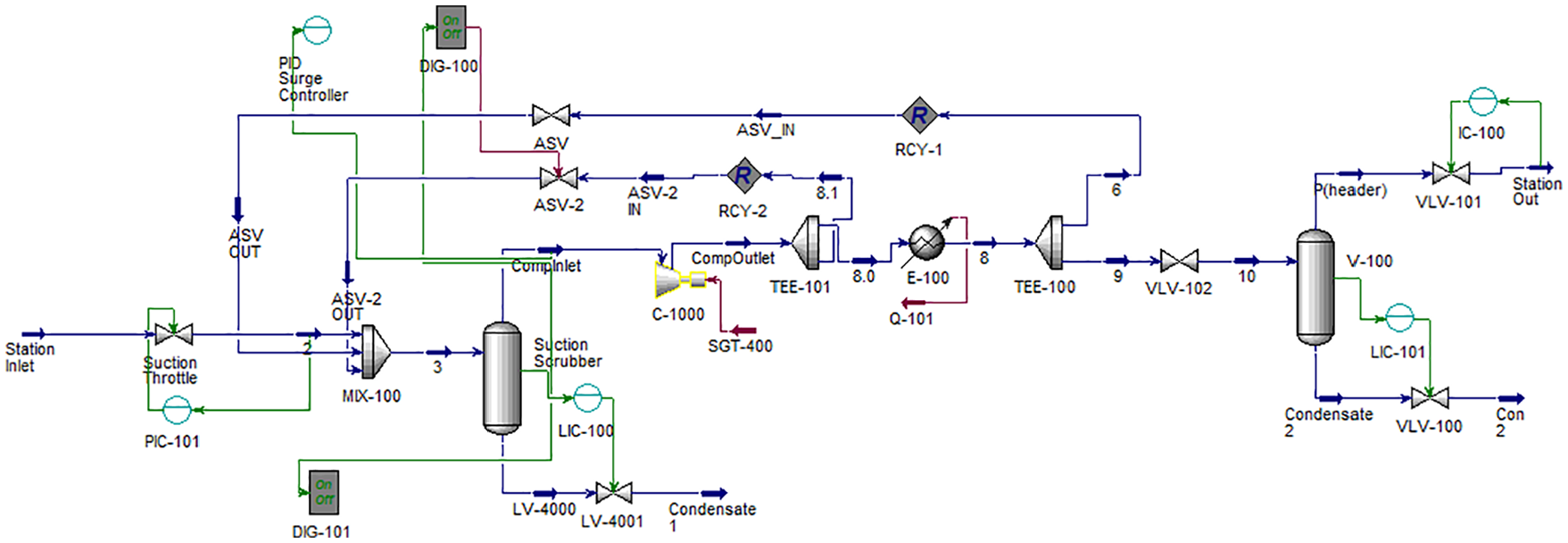
HYSYS based model for centrifugal compressors.
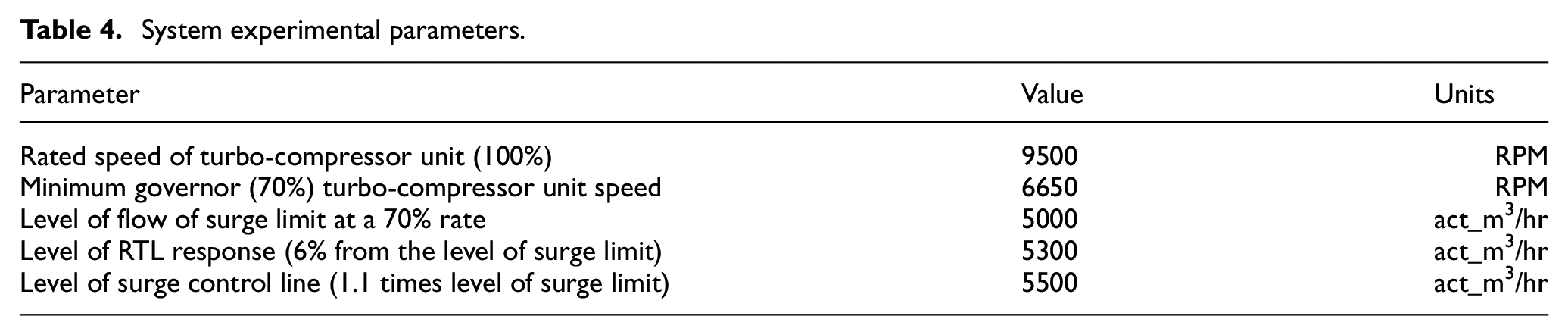
Data of different parameters were collected from Gas Compressor Station, for the control valves, CC, heat exchanger, piping, and scrubbers. The important system parameters incorporated in the model are elaborated in Table 4.
System experimental parameters.
Actual values from the gas station were compared with the HYSYS values, and the percentage (% age) error was calculated to confirm the accuracy and validity of the simulation results. The comparison of important parameters of the HYSYS model and gas compressor station values is shown in Table 5.
Comparison of HYSYS model with practical values.
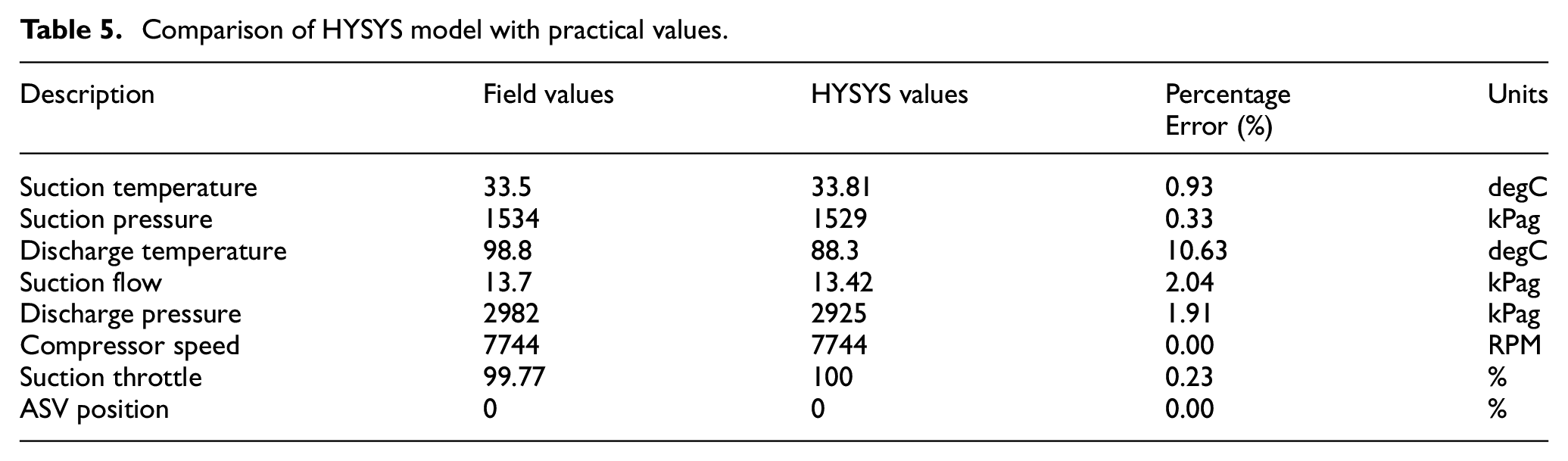
It can be seen that all important parameters shown in Table 5 give the percentage (%age) error between simulation and practical values within acceptable bounds. This confirms the accuracy and validation of simulation results.
Results and discussions
Surge occurrence without ASC system
Case 1: High header pressure build up
This surge condition is tested by the closure of the discharge valve at a rapid rate to increase the header pressure, as depicted in Figure 12. Hence, the compressor enters the surge whereas the flow varies cyclically when the pressure in the header is raised to 2720 kPag from 2447 kPag.
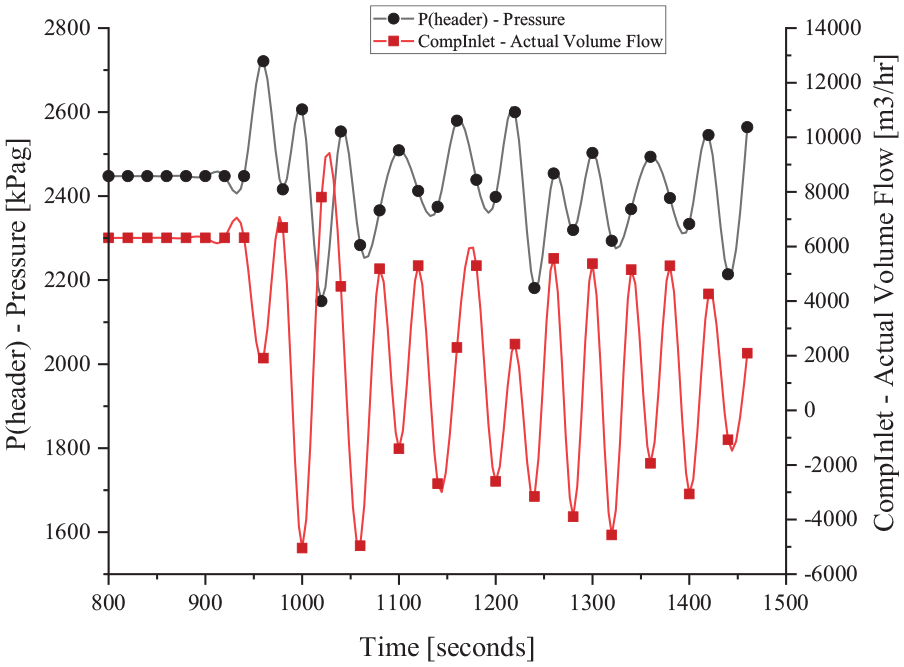
High header pressure build up.
The results in Figure 12 show that the compressor experiences surge during high-pressure build-up at the header and must be protected by the ASC in this condition.
Case 2: Decrease in suction pressure
To simulate this condition, the suction throttle valve is closed in a rapid way and the compressor experiences the surge as shown in Figure 13. The fluctuation of flow starts where the first crest varies to –8107 m3/hr from 8564 m3/hr around 1500th of a second when pressure is declined to 1200 kPag from 1520 kPag.
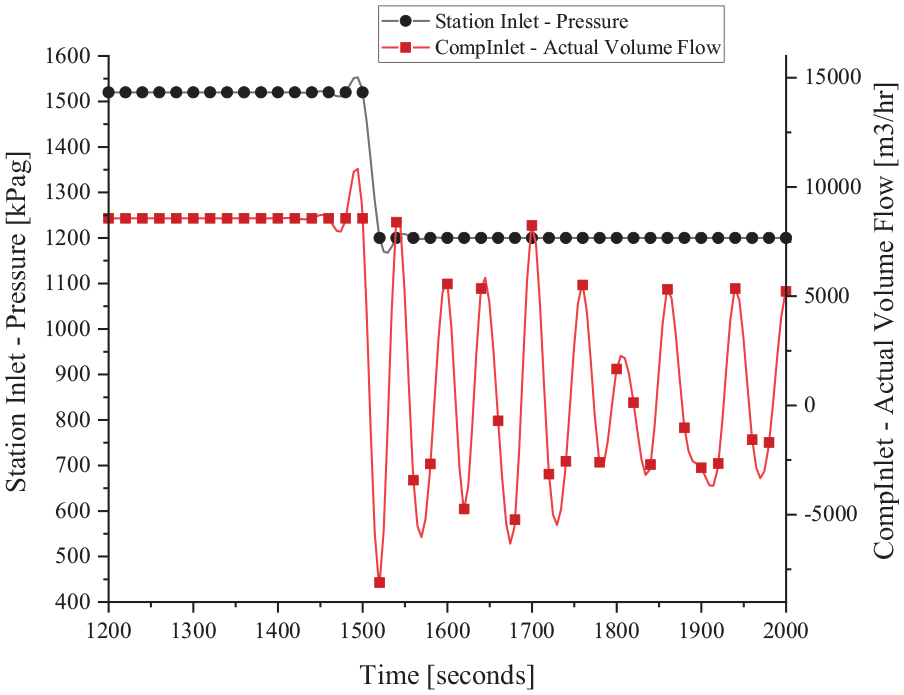
Decrease in suction pressure.
The results in Figure 13 show that the compressor experiences surge during low suction pressure conditions and must be protected by the ASC.
Case 3: Startup of unit
In this condition, the speed of the compressor reaches 6650 from 0 rpm while the ASV is closed as shown in Figure 14. A surge is produced and flow exhibits a rapid change, to 8480 from –6258 and the process persists until the structure is highly unbalanced.
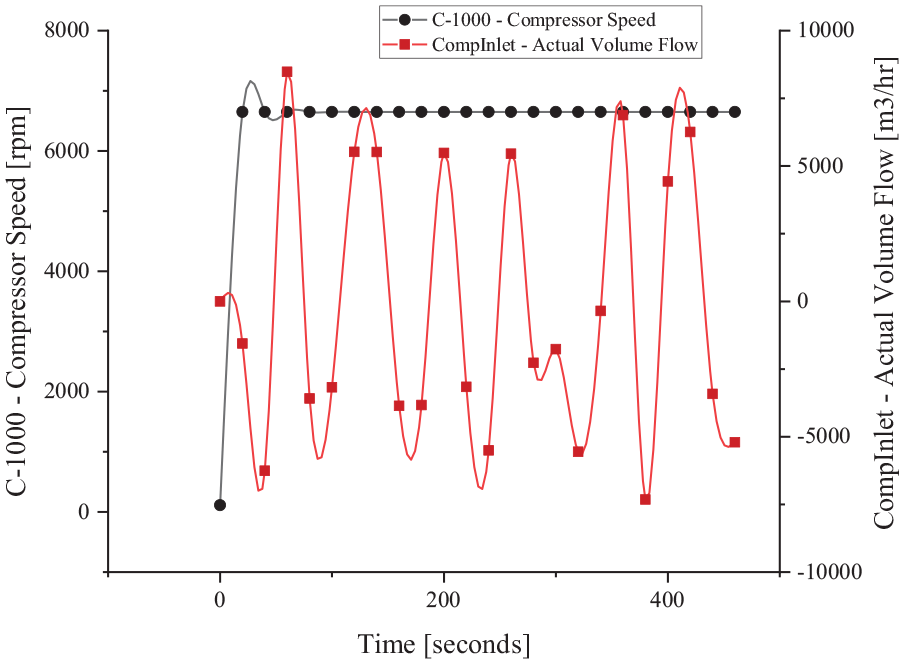
Startup condition surge.
The results in Figure 14 show that the compressor experiences surge during the start-up of the unit and must be protected by the ASC.
Case 4: Emergency shutdown of unit
During the emergency shutdown of the unit due to any fault, the speed suddenly reduces to zero. This is simulated for our CC with closed ASV to observe the surge occurrence as shown in Figure 15. The flow is reversed to –3646 m3/hr from 8627 m3/hr as the pace is reduced to 3325 rpm from 6650 rpm.
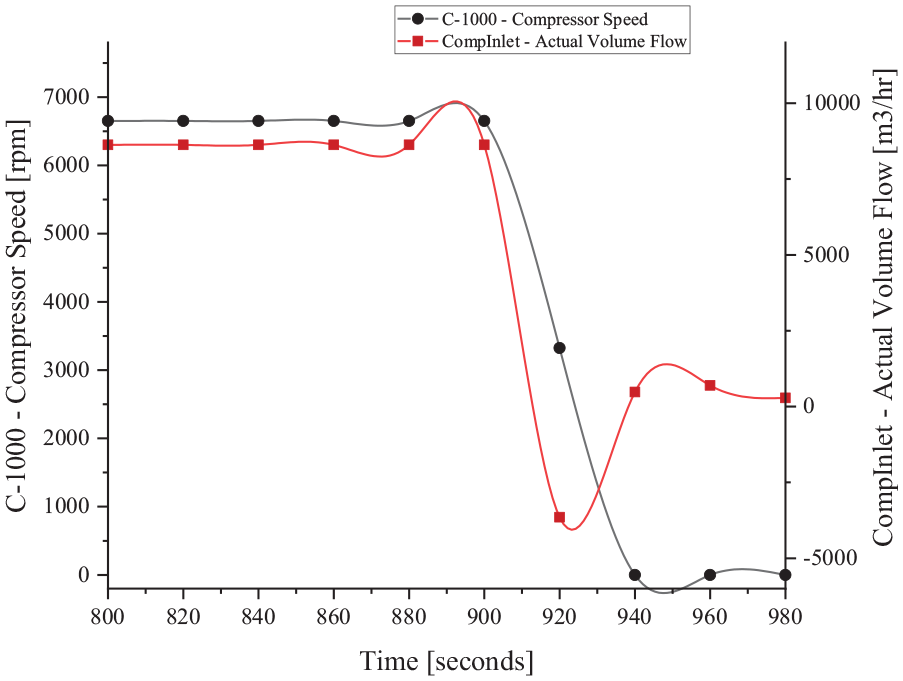
Shutdown condition surge.
The results in Figure 15 show that the compressor experiences surge during the emergency shutdown of the unit and must be protected by the ASC.
Conventional PID ASC system response for surge protection
Case 1: High header pressure
A normal surge condition is simulated to observe the performance of the conventional PID based ASC system. At 3100th second, by increasing the pressure in the header to 3547 kPag from 3282 kPag, the flow is reduced to 5048 m3/hr where anti-surge control sends output to release the anti-surge valve for the rise in the flow according to the setpoint that is, 5500 m3/hr. The system avoids the surge for this scenario as explained in Figure 16(a) to (c).
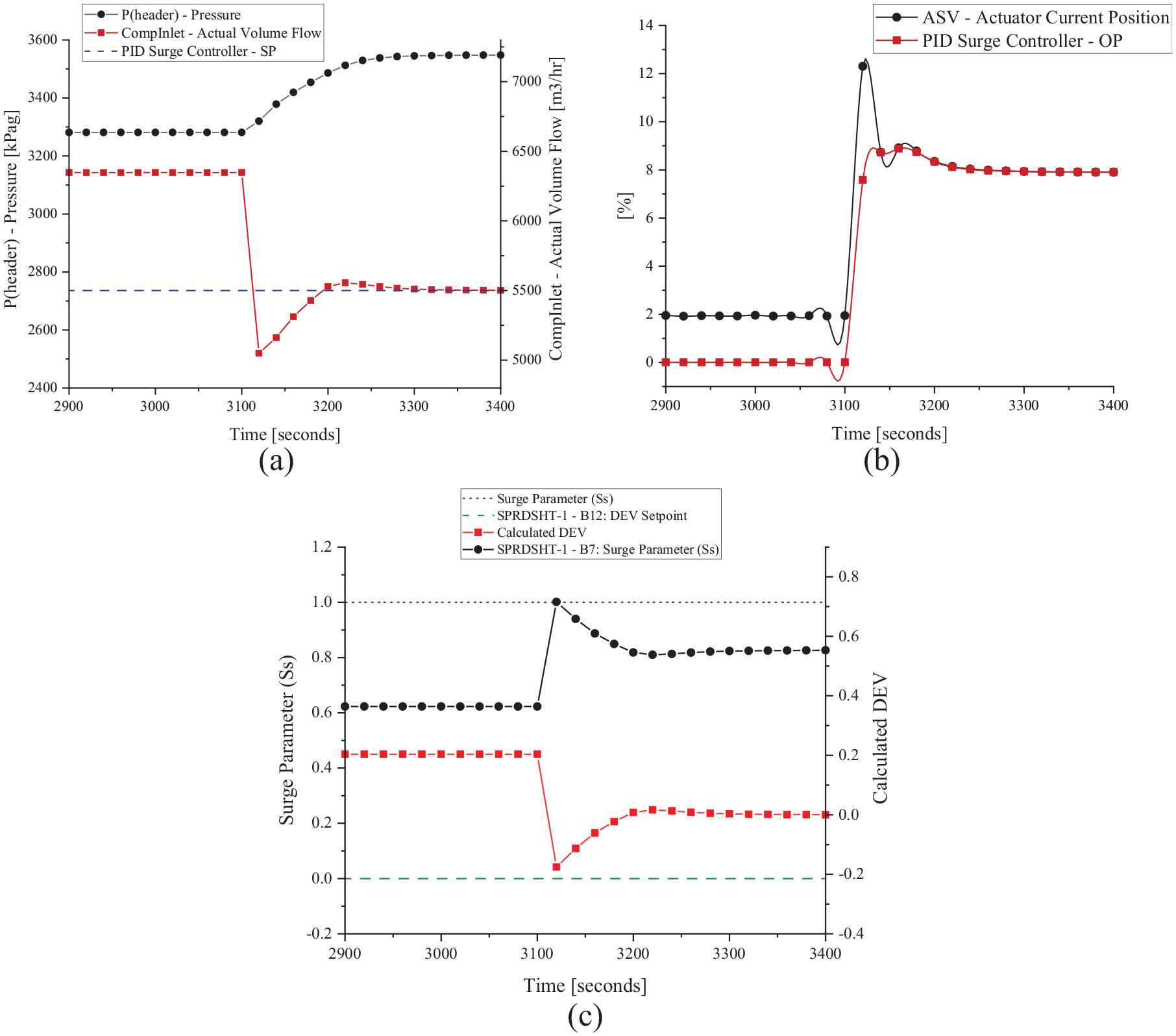
PID surge response for case 1: (a) header pressure and inlet flow, (b) controller output and actuator position, and (c) surge parameter and deviation.
Surge and DEV parameters alter from 0.6 to 1.0 and 0.2 to –0.175 respectively in the case of lesser flow and the values are set to normal by the ASV control action. The results in Figure 16(a) to (c) show that a properly tuned conventional PID controller can protect the compressor in slow surge conditions caused by high header pressure.
Limitations in severe surge case
Now a severe surge case is simulated to observe the working of a conventional PID controller based ASC system. Anti-surge control generates 25% output for the opening of an anti-surge valve for the restoration of flow when the pressure in the header is raised to 3600 kPag from 3282 kPag at 5860th second rapidly for a huge surge to occur. The flow is decreased to 3299 m3/hr from 6235 m3/hr where the compressor experiences the surge as shown in Figure 17(a) and it shows that the system is restored right after 2 cycles of the surge by opening the anti-surge valve by 33% (Figure 17(b)).
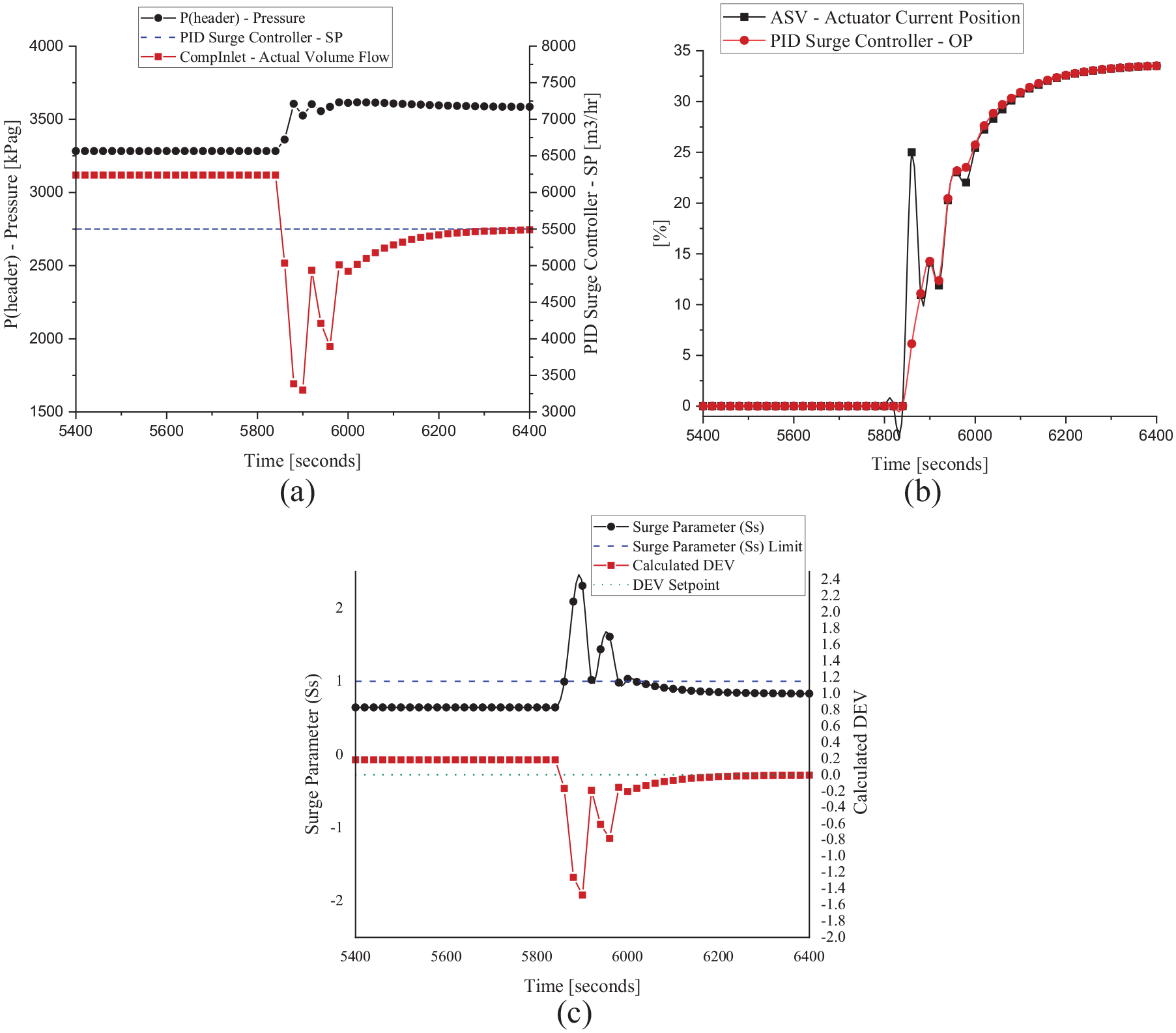
PID limitations for severe surge in case 1: (a) header pressure and inlet flow, (b) controller output and actuator position and (c) surge parameter and deviation.
In this case surge and DEV parameters vary from 0.64 to 2.3 and 0.18 to –1.47. Surge is experienced by the compressor which is highly undesirable. The results show that a properly tuned conventional PID controller can protect the compressor in slow surging conditions caused by high header pressure. The results in Figures 17(a) to (c) show that a properly tuned conventional PID controller fails to protect the compressor in severe surge conditions caused by high header pressure.
Case 2: Low suction pressure
A normal surge condition is simulated to observe the performance of the conventional PID based ASC system. It is depicted in Figure 18(a) that as the reduction in suction pressure occurs, the flow varies to 5406 m3/hr from 6279 m3/hr to 1686 kPag from 1827 kPag during 9140th sec, and anti-surge control produces output (7%) to operate the anti-surge valve for the restoration of flow according to the setpoint 5500 m3/hr (Figure 18(b)).
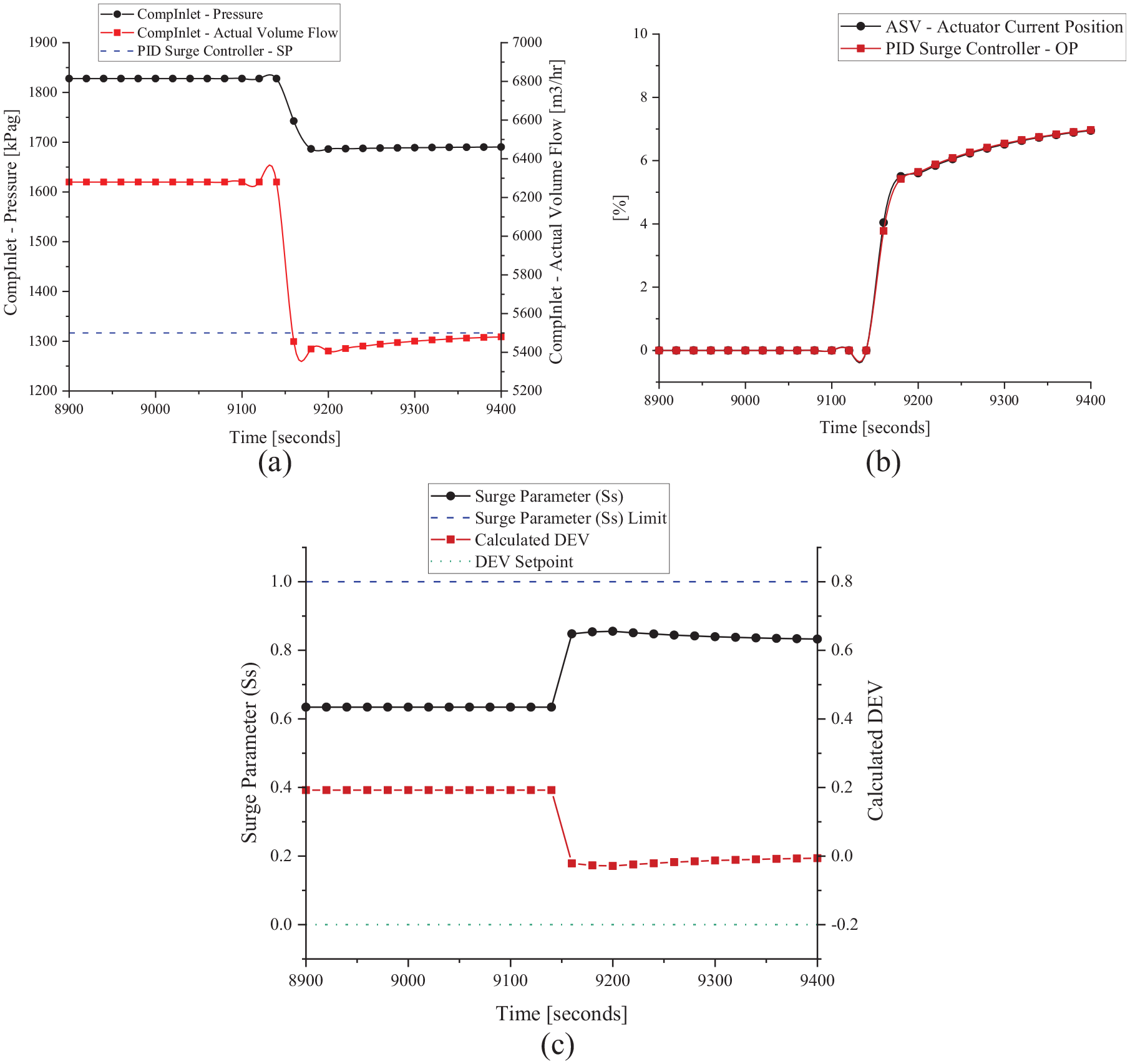
Surge response of PID controller for low suction pressure case: (a) suction pressure and inlet flow, (b) controller output and actuator position and (c) surge parameter and deviation.
As shown in Figure 18(c), surge and DEV parameters alter from 0.63 to 0.85 and 0.19 to –0.02 respectively. Surge is prevented in this case. The results show that a properly tuned conventional PID controller can protect the compressor in slow surge conditions caused by low suction pressure.
Limitations in severe surge case
Now a sever surge case is simulated to observe the working of a conventional PID controller based ASC system. ASC produces a 30% output for the opening of an anti-surge valve for the restoration of flow when a reduction occurs in the suction pressure. The value becomes 1650 kPag from 1824 kPag during 9500th sec, rapidly for the huge surge to occur. It should be observed that the flow is decreased to 3580 m3/hr from 6319 m3/hr and a surge occurs in the compressor. It can be seen in Figures 19(a) to (c), that the system is then restored right after a cycle of the surge by opening the anti-surge valve by 33%.
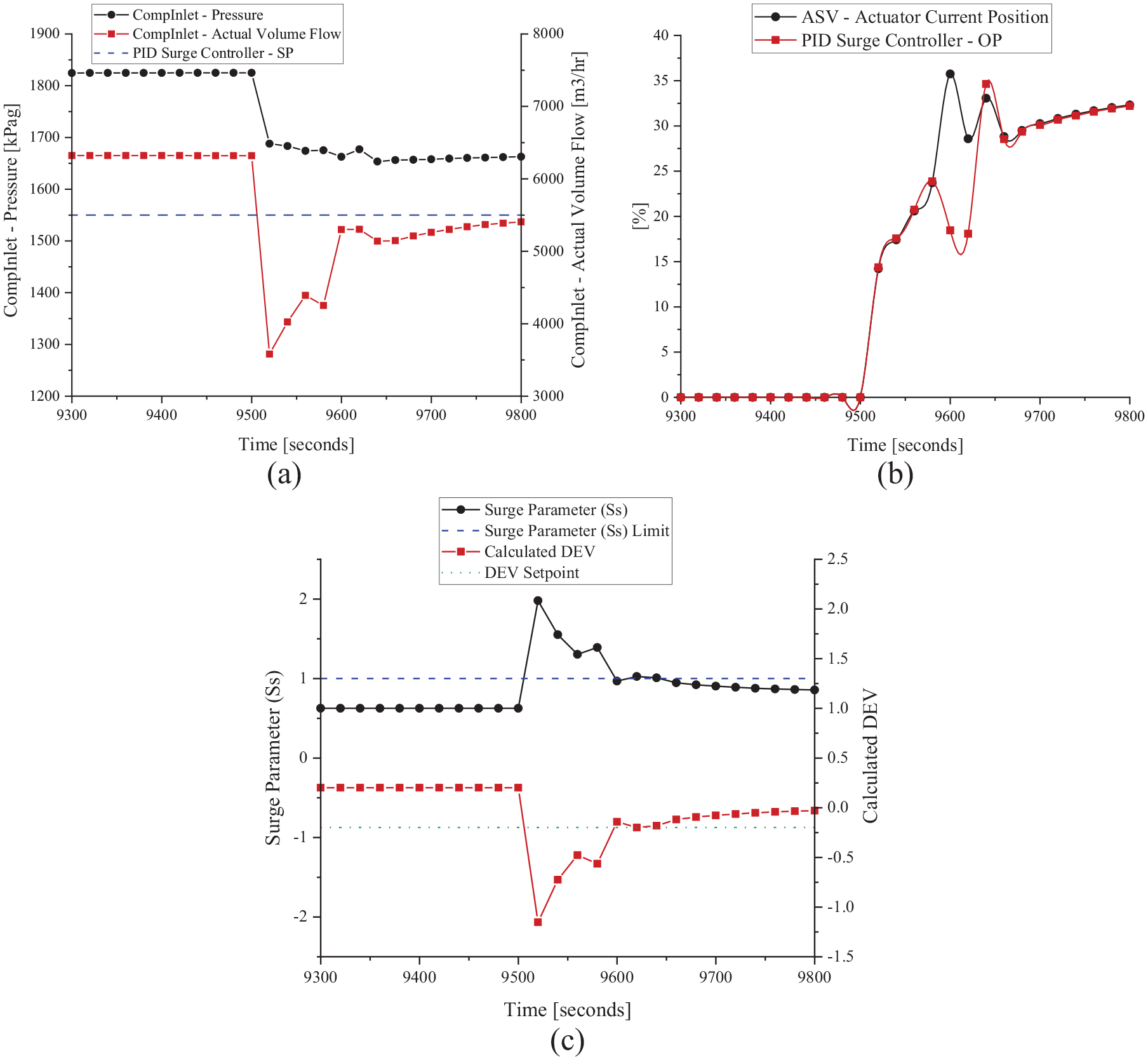
Severe surge limitation in PID controller for case 2: (a) suction pressure and inlet flow (b) controller output and actuator position and (c) surge parameter and deviation.
It can be seen in Figure 19(c) that surge and DEV parameters change from 0.625 to 1.97 and 0.2 to –1.15 respectively. The results show that a properly tuned conventional PID controller fails to protect the compressor in severe surge conditions caused by low suction pressure and surge is experienced by the compressor which is highly undesirable.
Advanced split PID response for severe surge protection
Case 1: High header pressure
Now a severe surge case is simulated to observe the working of advanced PI+D based ASC system. The advanced ASC generates 27% output (PI 17% + RTL 10%) for the opening of an anti-surge valve for the restoration of flow when the pressure in the header is raised to 3619 kPag from 3284 kPag at 4920th second rapidly for the huge surge to occur. The flow is decreased to 5213 m3/hr from 6250 m3/hr. The compressor experiences a surge in this case as shown in Figure 20(a) and the system is then restored to 5500 m3/hr, hence the surge is avoided.
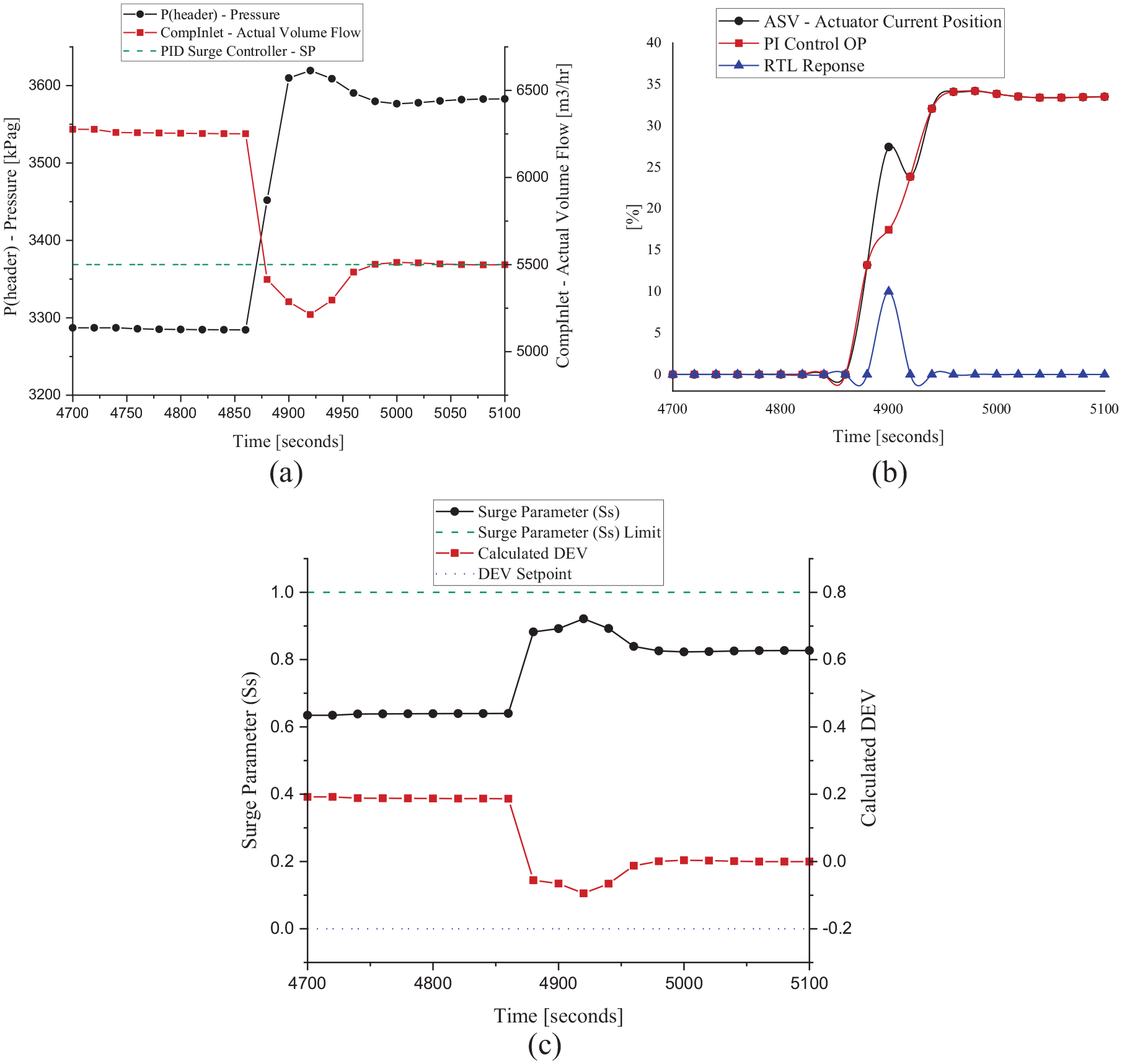
Advanced controller response at Severe surge for case 1: (a) header pressure and inlet flow, (b) controller output and actuator position and (c) surge parameter and deviation.
Surge parameter and DEV parameters vary from 0.64 to 0.92 and 0.18 to –0.05 respectively, without surpassing the restrictions and stabilising the structure. The results in Figures 20(a) to (c) show that the advanced PI+D based ASC system can protect the compressor in severe surge conditions caused by high header pressure and is proved to be superior over the conventional PID controllers for the safety of CCs.
Case 2: Low suction pressure
Now a severe surge case is simulated to observe the working of advanced PI+D based ASC system. To produce the surge at a severe level, the suction pressure is ramped down in a brisk way to 1656 kPag from 1825 kPag at 7510th second where the anti-surge control produces 35% output (PI(25%) + RTL(10%)) quickly to release the anti-surge valve for the restoration of flow (Figure 21(b)). As depicted in Figure 21(a), the flow decreases to 5071 m3/hr from 6320 m3/hr after that restoration occurs according to the setpoint 5500 m3/hr. Hence, surge is prevented in the compressor.
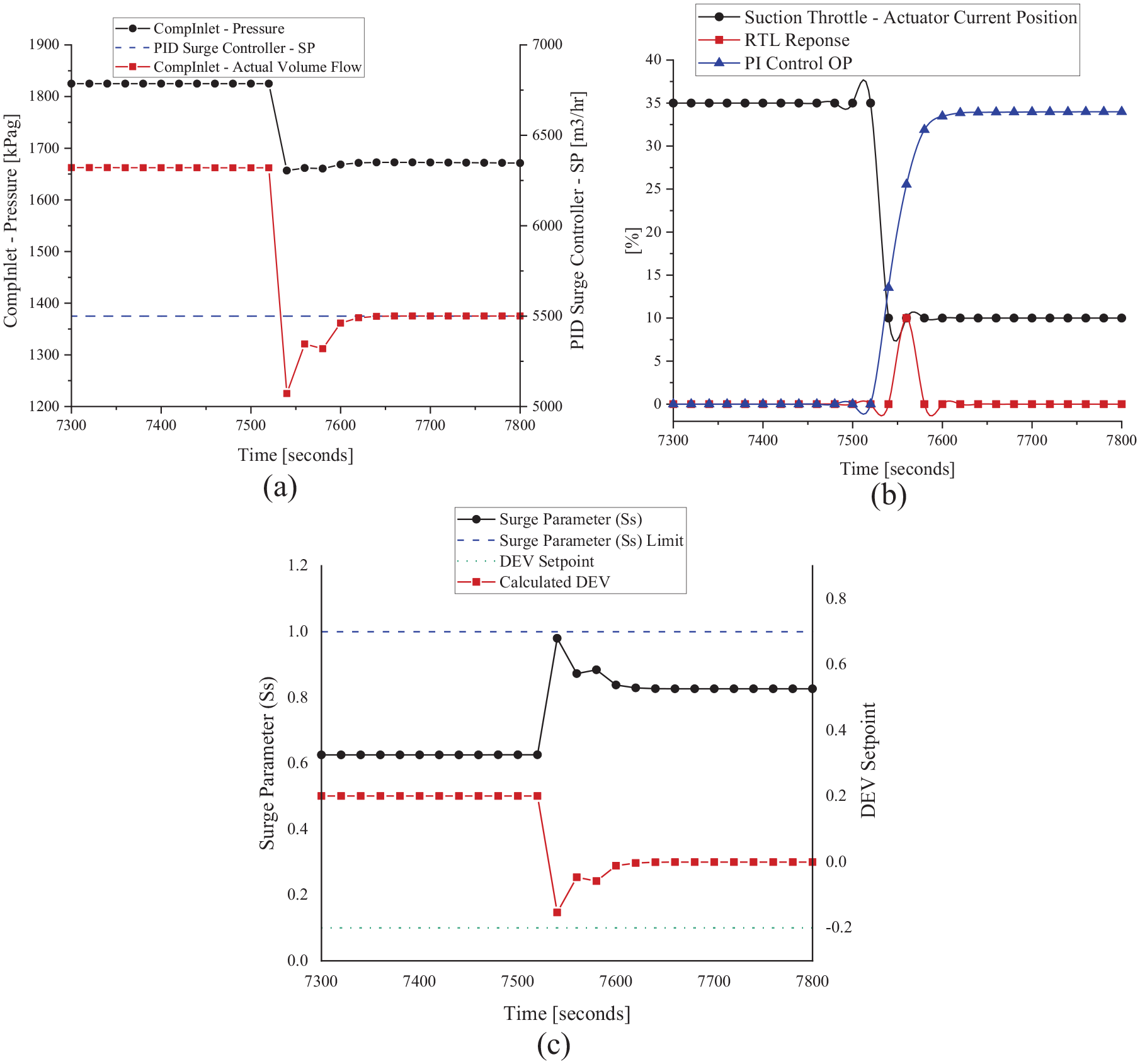
Severe surge response of advanced controller for case 2: (a) suction pressure and inlet flow (b) controller output and actuator position and (c) surge parameter and deviation.
Surge and DEV parameters vary from 0.625 to 0.97 and 0.2 to –0.15 respectively. It is restored afterward to the standard values and the structural stability is achieved as explained in Figure 21(c). The advanced PI+D based ASC system is proved to be superior over the conventional PID controllers for the safety of CCs. The results show that the advanced PI+D based ASC controller can protect the compressor in severe surge conditions caused by low suction pressure and is proved to be superior over the conventional PID controllers for the safety of CCs.
Surge Protection during Startup of unit
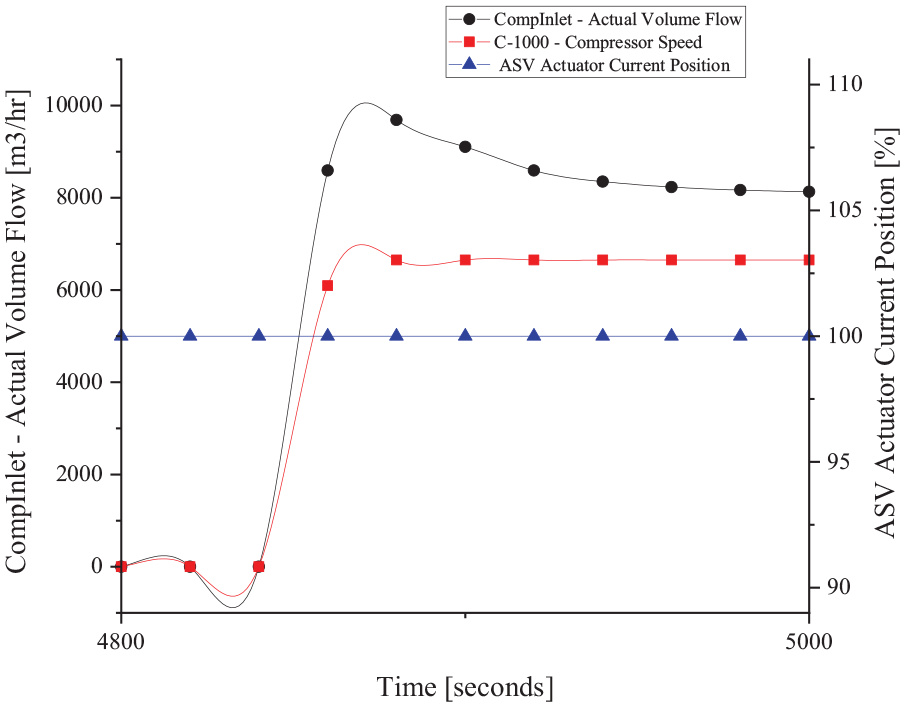
As the compressor turbine speed is raised to 6650 rpm from 0 rpm in one minute time, ASV sustains its open position and the flow reaches its maximum value of 8681 m3/hr and as mentioned in Figure 22, it is almost constant at 8627 m3/hr. Surge is successfully avoided.
Surge protection for case 3.
The results in Figure 22 show that the surge was prevented by the controller by fulling opening the ASV during the start-up condition.
Surge protection during unit shutdown
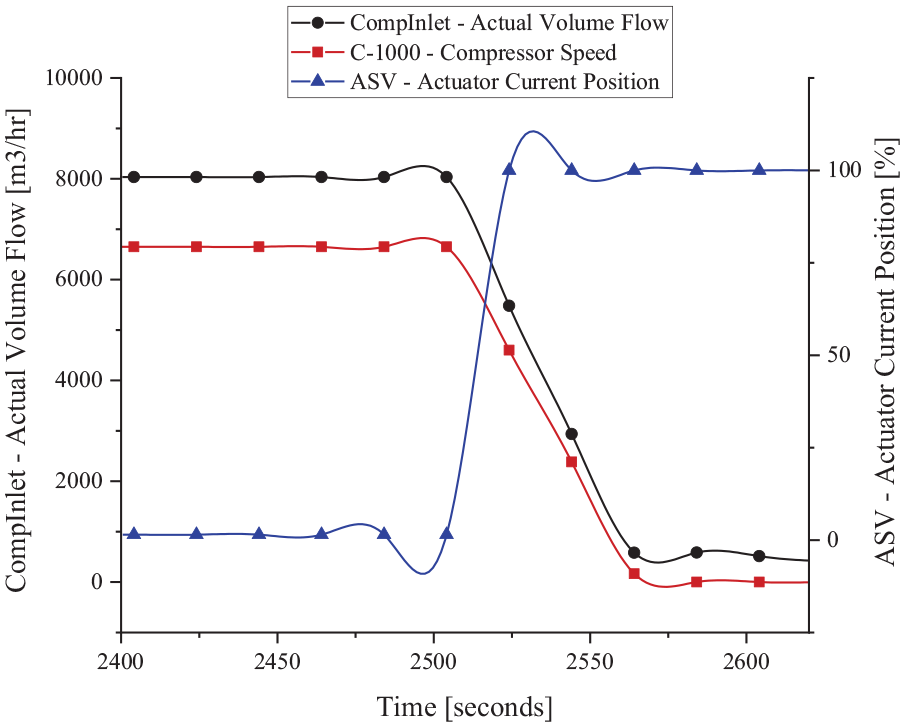
The anti-surge valve completely opens as an emergency shutdown command is triggered, and the turbine compressor speed decreases from 6650 rpm to 0 rpm. In this case, the surge does not take place as shown in Figure 23.
Surge protection for case 4.
The results in Figure 23 show that the surge was prevented by the controller by fulling opening the ASV during the emergency shutdown of the unit.
Thus, the above results elaborate the protection of CCs from the surge in four important scenarios mostly faced in the industry.
Comparison between conventional PID and advanced PI+D controller
This study showed that Advanced anti-surge control is far more reliable and effective than the conventional properly tuned PID control. The results show that a properly tuned conventional PID controller can protect the compressor in slow surging conditions caused by high header pressure and low suction pressure. However, it fails to protect the compressor in severe surge conditions. The advanced PI+D based ASC system can protect the compressor in severe surge conditions caused by high header pressure as well as low suction pressure and is proved to be superior over the conventional PID controllers for the safety of CCs.
Comparison with other ASC methods
This section explains a comparison of the proposed advanced anti-surge control with the other control schemes. In Dominic et al., 15 the authors proposed a feedforward controller with an existing PID controller for a fuel gas compressor control application. The main drawback of the proposed technique is added complexity with additional controller and stability of the overall system. Moreover, the proposed system will not be able to protect the compressor during fast transients in operating point towards the surge control line due to the high computational delay of the proposed algorithm. Other ASC techniques proposed in Refs,2,9,10,12 are based on model predictive control; 16 is based on neural network and13,14 are based on fuzzy logic control. These techniques possess several practical issues. Firstly, a precise CC model is required for the model predictive control and huge data is required for fuzzy logic control or neural network-based control. Secondly, Fuzzy logic control is quite complex in terms of defining membership functions, fuzzification, and defuzzification processes. Finally, time delay becomes an important parameter in these techniques due to their high computational cost requiring high speed dedicated controllers. In contrast to these, the proposed advanced ASC is easier to implement and works well in normal as well as severe surging conditions. This control can be implemented with existing PLCs models available in the market without the need for sophisticated controllers with high computational speed. The proposed algorithm has proved successful in protecting the compressor during fast transients of the operating point towards the surge limit line. These advantages make the proposed advanced ASC more practical for the industry.
Conclusions
To prevent a surge in CCs, the anti-surge controller and the anti-surge valve play a vital role. As explained in this paper, the surge is a rapid process that may be occurred in start-up, low suction pressure, high header pressure, and emergency shutdown. It has been observed that during the severe type of surge in the small-time, the properly tunned conventional PID controllers were not effective necessitating the use of advanced control. The advanced control was designed with a split PI+D response in which the derivation response termed as a recycle trip response was designed to open the valve quickly in case of a severe surge. The ASV was opened fully in case of a start-up and emergency shutdown of the unit.
Future works may include the study of the advanced control at variable speeds of the compressor to observe its performance on a larger scale. Another direction is to observe the effects of measurement errors, delays, and computational burdens by experimenting on a test bench environment to compare with the existing ones. Faults in the sensors and actuators of the ASC and development of fault-tolerant control for these may also be considered for reliability enhancement of the system.
Footnotes
Appendix
Acknowledgements
The authors would like to thank colleagues for suggestions to improve paper quality.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.