
Abstract
Modern network applications place higher demands on its controller, especially for those with time-varying delays and limited communication capacity. For such cases, the fuzzy system has already become an advanced and powerful tool to deal with the control problem in consideration of a guaranteed cost performance. In this paper, we introduce the event-triggered mechanism with quantization effect to the controller, which proves to be more effective in terms of the information transmission. We adopt the classical Lyapunov approach to find the sufficient conditions for the controller and we illustrate the effectiveness of the controller with a numerical simulation.
Keywords
Introduction
Fuzzy systems have been proven to be an advanced and powerful tool in modelling and controlling of nonlinear and complex systems in a series of robotic applications,1–3 such as robot manipulator, 4 unmanned autonomous mobile 5 and rehabilitation robot. 6 In particular, much effort has been made towards the classical type fuzzy control systems, 7 which turns out to be a compelling tool for representing nonlinear dynamics.8,9 As a result, fruitful analytical and synthetical methodologies have been proposed. General examples can be found as filtering problems, stability problems, synchronization problems and so on.10–12 Moreover, the control strategies based on network have been discussed targeting at fuzzy systems relying on the substantial progress of network research. These works are mainly based on sample-data control framework. Meanwhile, some network constraints have also been taken into account, such as data packet dropout, bandwidth limitation and network communication delay.13–15 More precisely, in Ma et al. 14 the discrete-time information exchange is proposed instead of continuous-time approaches to decrease the information exchanges under networked communication environment. Moreover, in Guan et al. 15 and Zhang and Han, 16 the limited communication capacity is discussed with the corresponding effective control methods. These constraints are always inevitable and may lead to system performance degradation or even system divergence, which make it critical and sensible to specify the corresponding effect during the design procedure.
On another active research area, the so-called event-triggered strategy has attracted rapidly growing attention for control systems. In comparison to the traditional time-triggered methods according to the fixed-time instances, the event-triggered strategy is based on a prescribed triggering function monitoring the event thresholds.16–18 For example, based on the sign function and backstepping design, a novel event-triggered strategy is studied for a class of uncertain non-linear systems with global finite-time controller. 19 Another event-based adaptive control approach is developed to deal with a class of uncertain nonlinear systems with unknown control direction and actuator failures. 20 In Pan et al. 21 an adaptive robust control approach with event-triggering mechanism is designed to handle the communication burden, physical limitation and measurement errors in uncertain constrained nonlinear systems. The effective finite-time control is studied in Pan and Sun 22 for vehicle active suspension systems with desired control performance. As such, this effective mechanism would bring considerable benefits, which can be obtained by decreasing the network burden and increase the signal transmission efficiency. Especially, additional advantages can be obtained in energy saving in some wireless network scenarios.23,24 It is worth mentioning that although successful performance on event-triggered control systems have been addressed, the concerns on limited communication capacity issue with the event-triggered approaches are few. As is well known, there is no perfect capacity in the digital communication channels. This would lead certain conservatism when modeling these controller or sensor information transmissions. As a result, it is reasonable and necessary to investigate a more practical communication strategy considering the communication capacity limitations. However, to our best knowledge, the event-triggered control problem for delayed T–S fuzzy systems with (a) guaranteed cost performance and (b) limited communication capacity is still remaining unresolved.
Provoked by the aforementioned discussions, we aim at solving the guaranteed cost control problem of time-varying delayed T–S fuzzy systems based on event-triggered strategy with limited communication capacity. Compared with the most of the existing literature, our novelties include three points: (1) To deal with the limited communication capacity issue, an event-triggered strategy with transmission quantization is investigated for a time-varying delayed T–S fuzzy system while the desired guaranteed cost performance can be satisfied. (2) By adopting a Lyapunov–Krasovskii function, the delay-dependent control criteria are derived, and the corresponding fuzzy controller is designed with the aid of linear matrix inequality (LMI). (3) The established theoretical results are further illustrated with a numerical simulation case study.
The organization of the paper is as follows: In section ‘ Preliminaries and problem formulation’, some preliminaries are presented, and the control problem is established. Section ‘ Main results’ presents the theoretical conditions for the proposed control scheme. In section ‘ Illustrative case study’, the proposed control scheme is discussed in a simulated case study. In section ‘Conclusion’, the conclusion with some future perspectives is reported.
Preliminaries and problem formulation
System model
Consider the following time-varying delayed T–S fuzzy system based on IF–THEN rules:
System Rule
IF
THEN

where
As a result, the fuzzy system could be given by

where
with
Fuzzy event-triggered controller
Under the networked communications, the sampler of the system is supposed to be time-driven by sampling sequence:
Considering the limited network environment, the event-triggering strategy is proposed for networked controller design. The control input only updates when the following event-triggering function (equation (1)) can be satisfied.

where
Furthermore, the following quantizer (equation (2)) is considered for the limited communication work bandwidth:

where
where

As a result, the corresponding fuzzy controller can be defined as below:
Controller Rule
IF
THEN

where
Similarly, it can be obtained that

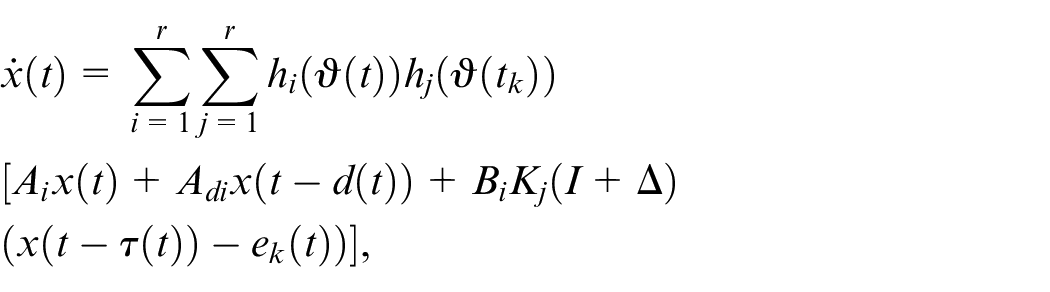
and we can rewrite the overall closed-loop system by parallel distributed compensation as follows 26 :
Control objective
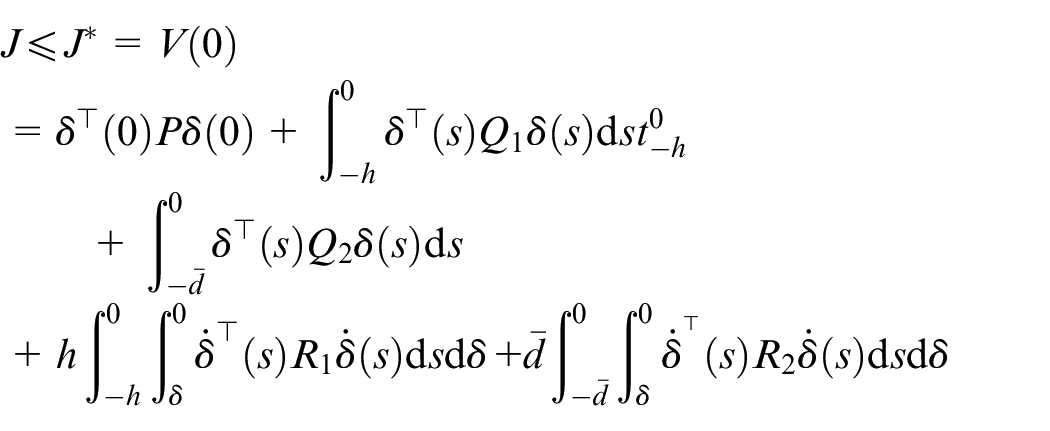
With the aforementioned discussions, the cost performance index is introduced for the T–S fuzzy system with time-varying delays, such that the desired control performance can be achieved with the proposed control scheme. In this paper, the following guaranteed cost performance is given.

where
Consequently, the goal is to ensure that the system can be asymptotically stable while the cost performance
Before proceeding, the following lemmas are useful for later results.

where

Main results
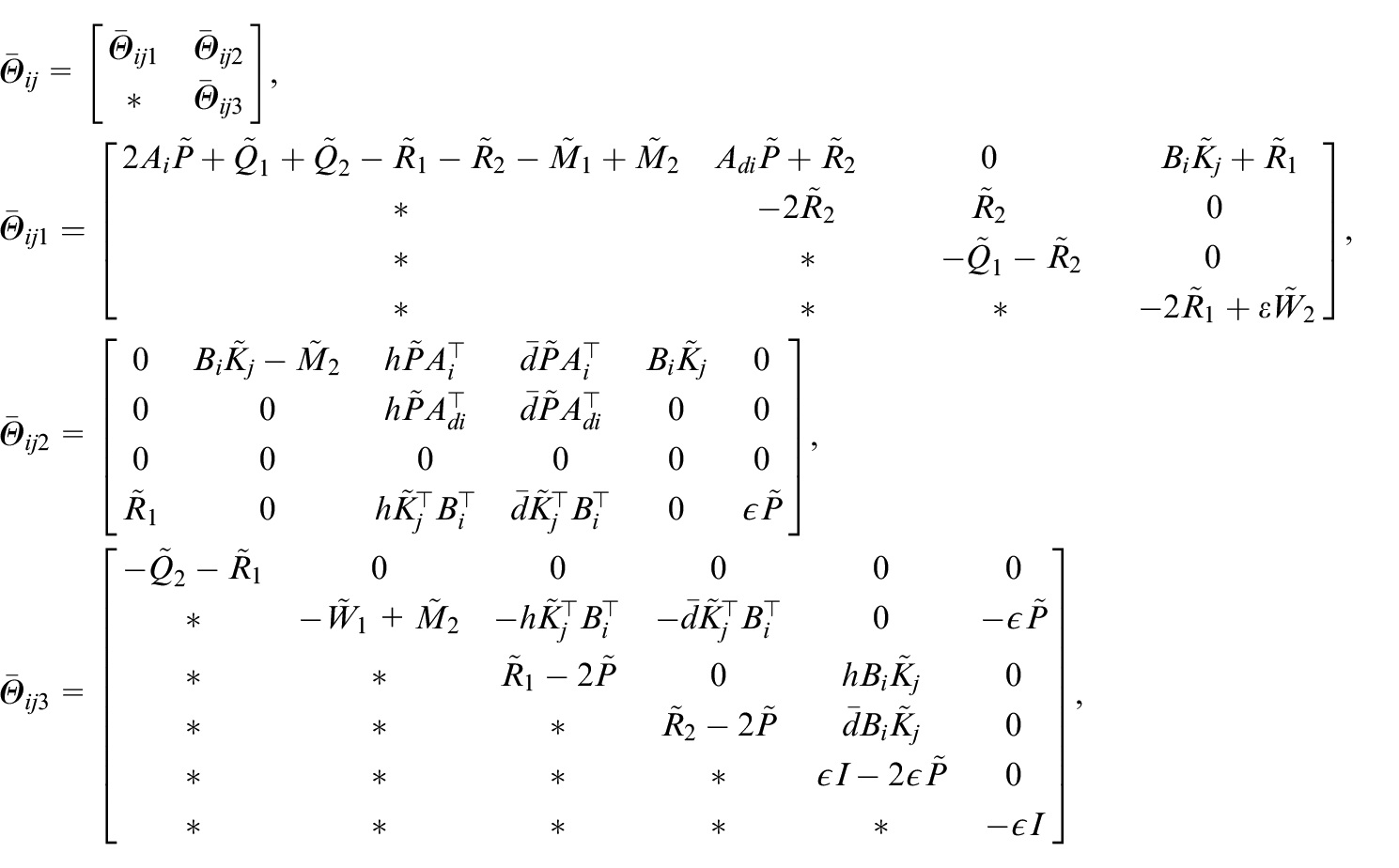
Following the preliminaries, we present the derivation of the sufficient conditions of the proposed controller. We introduce the design procedure of the controller hereafter.
where
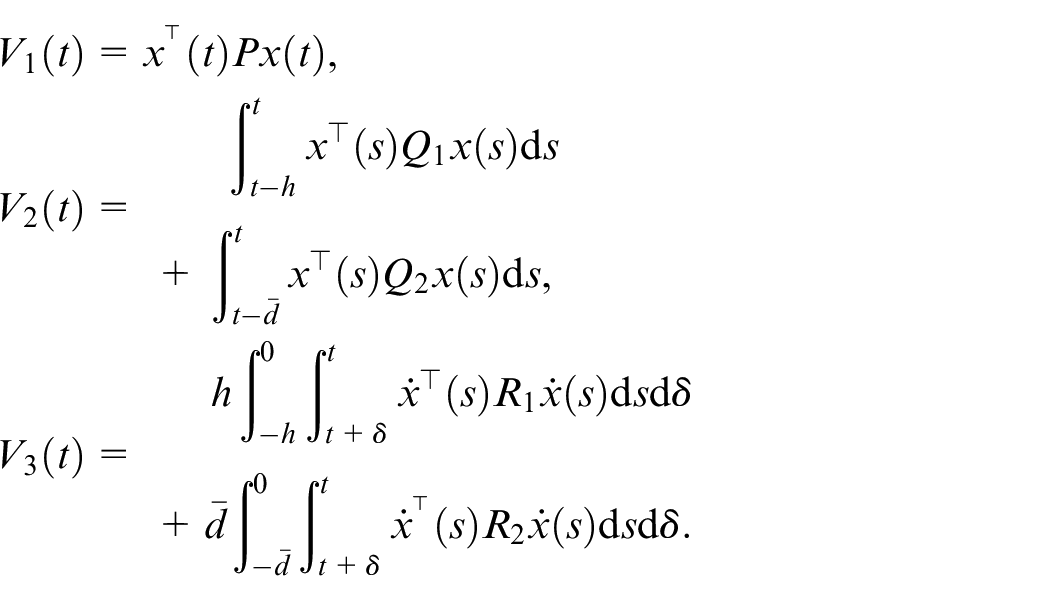
Secondly, the Lyapunov–Krasovskii function is constructed:

Where
Then, it can be obtained that
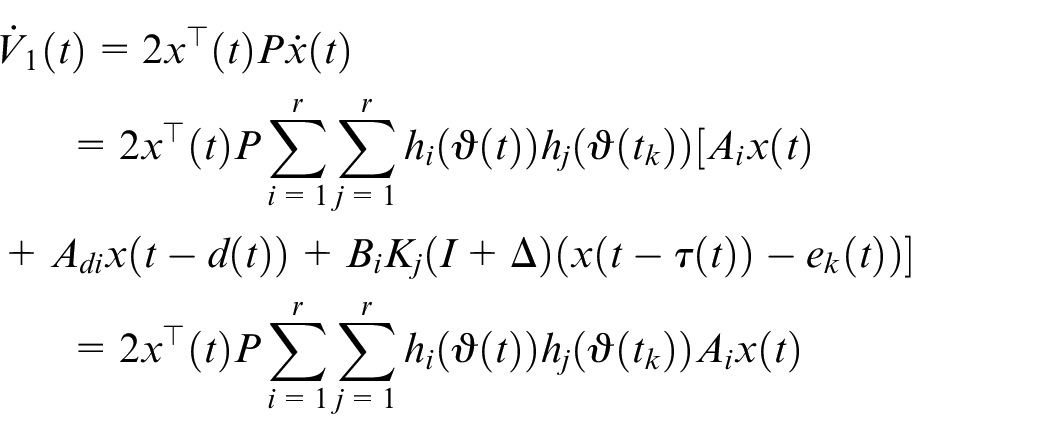
and

and
To determine the sign of each part of
and similarly, that
In addition, it can be derived that
where

With the event-triggering function, it follows that

Basing on the above results, one has

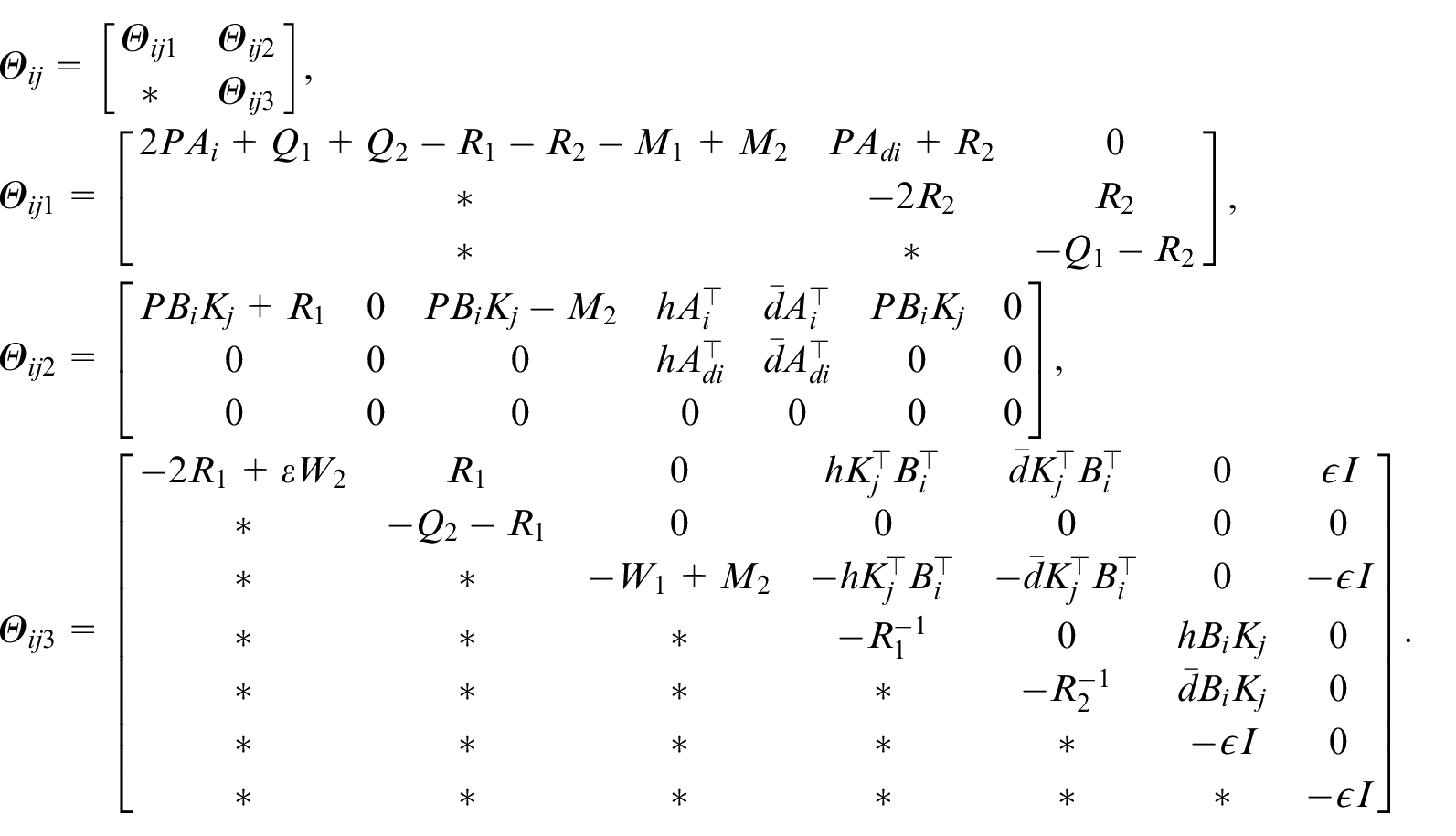
Where
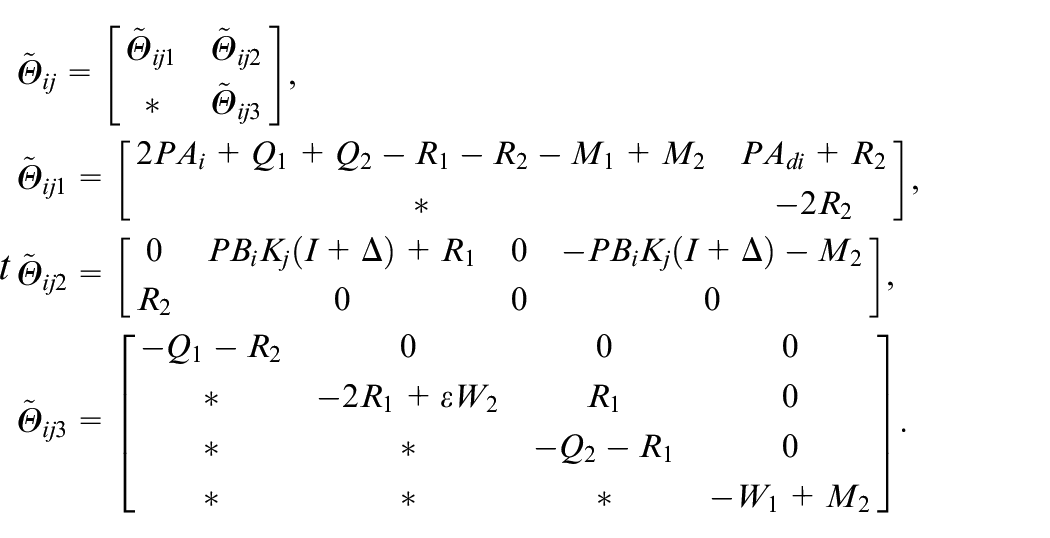
Together with Lemma 2 and the Schur complement, it holds that

when

such that
as
and the expected controller gains could be computed with:

Illustrative case study
We present a numerical simulation in this section, which could be seen as an abstraction of the controlled complex non-linear system, to verify the effectiveness of the controller.

where
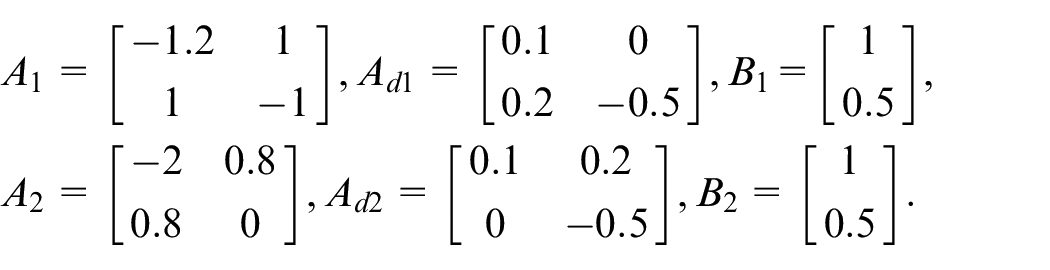
In the simulation, it is assumed that

By setting the above initial values and parameters as
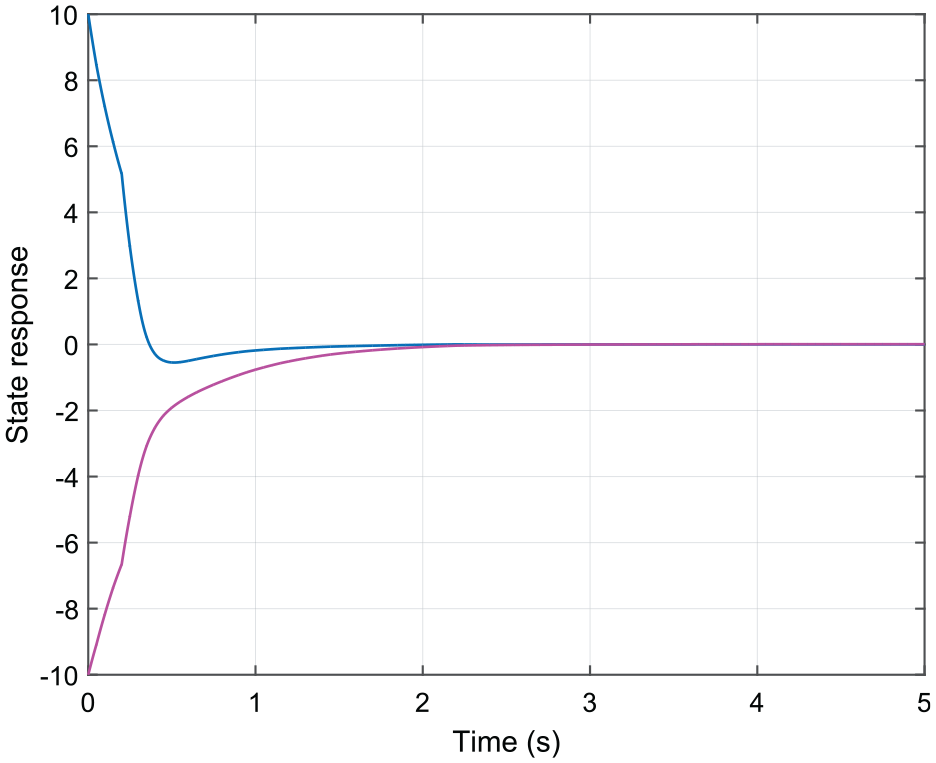
The simulated state response of the closed-loop system.
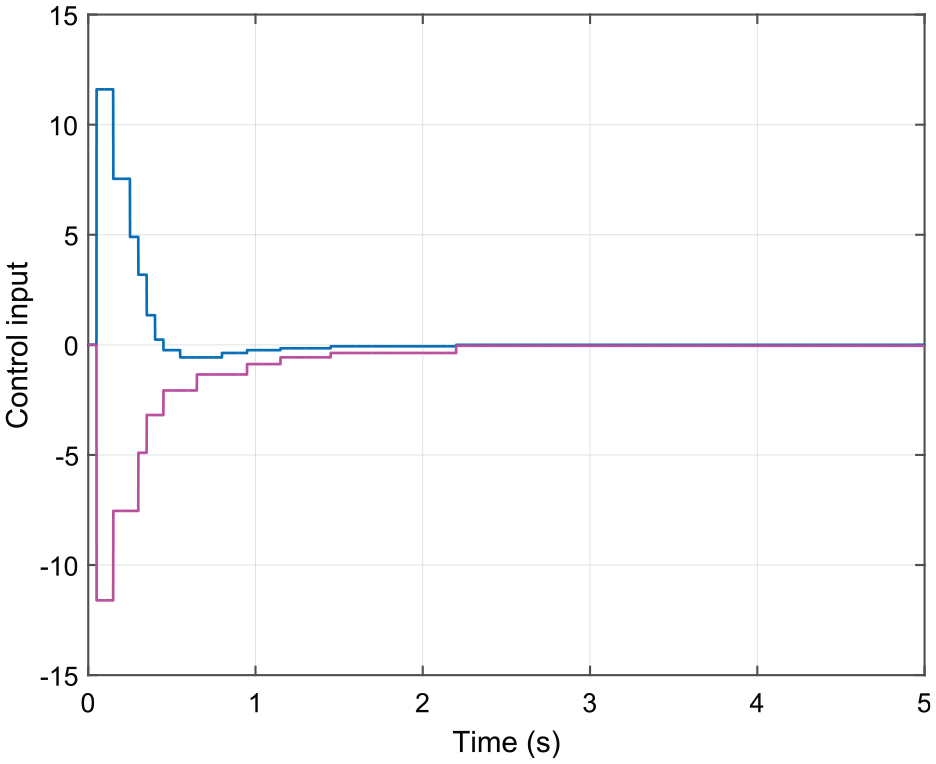
The control input in simulation.
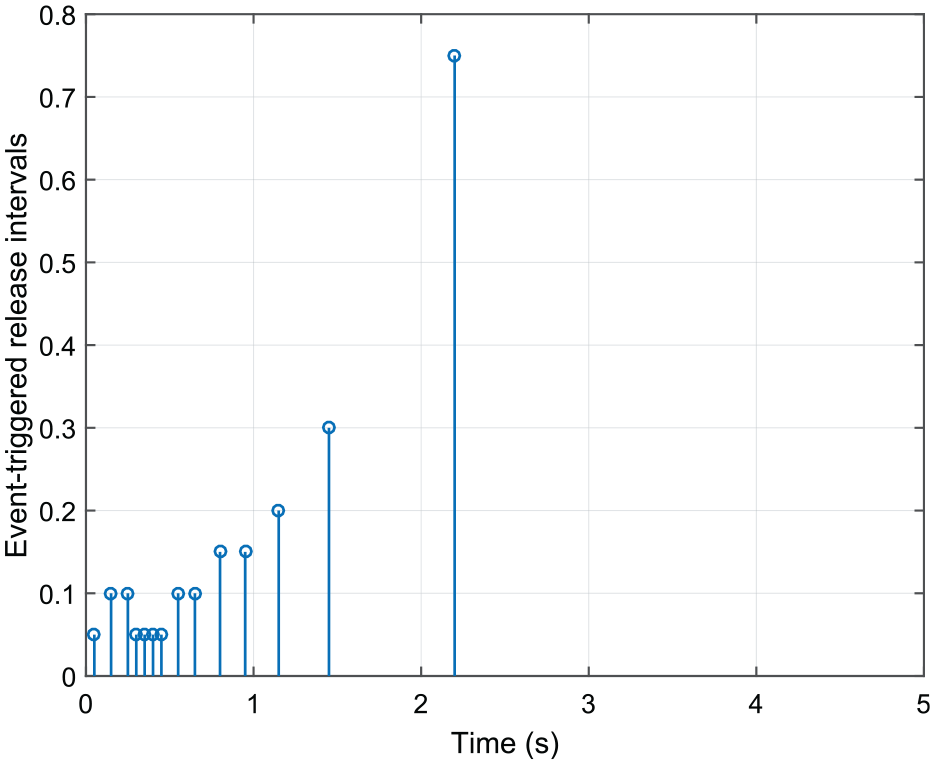
The event triggering signals in simulation.
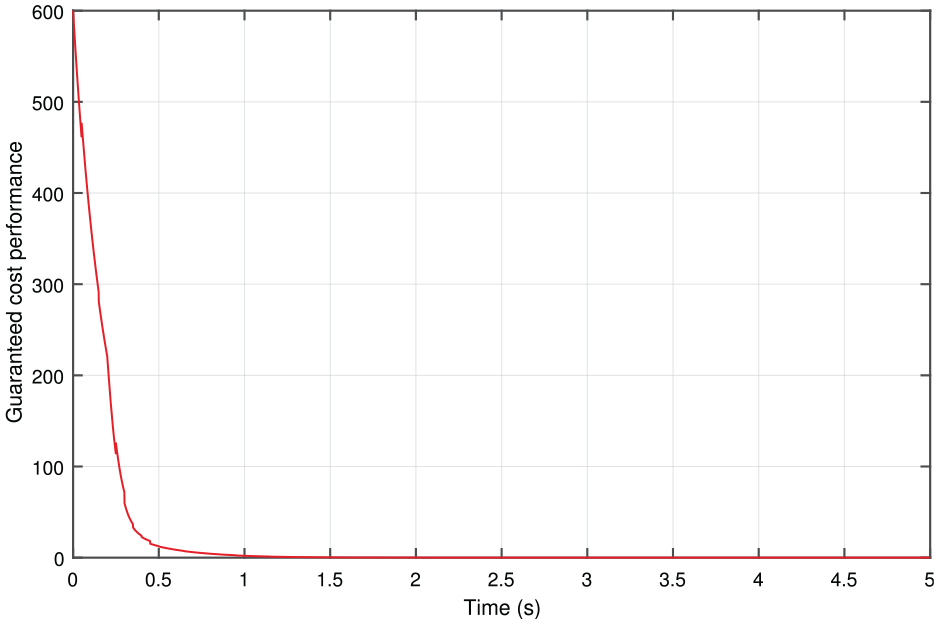
The guaranteed cost performance.
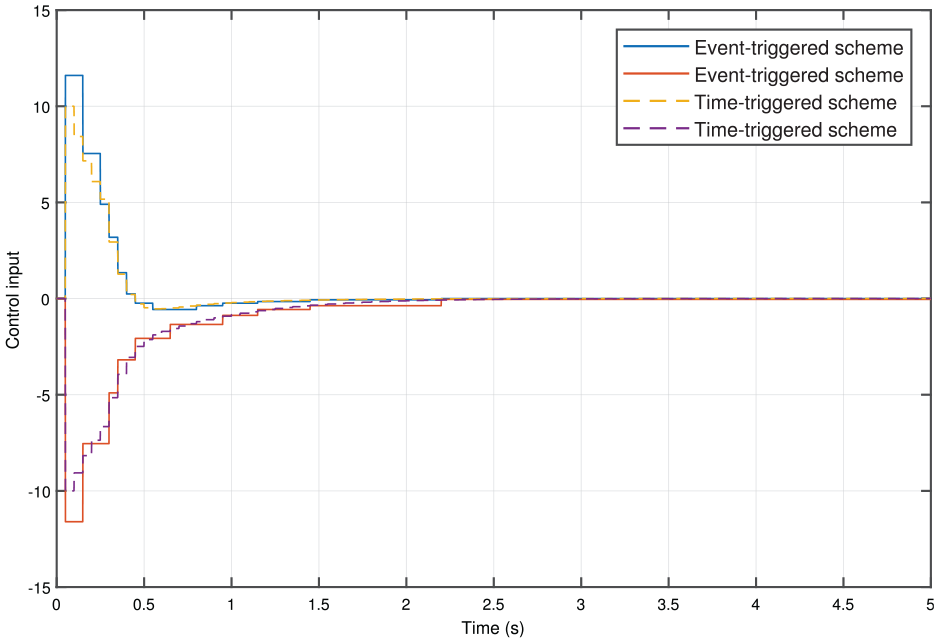
Comparison of the event-triggered and the time-triggered schemes.
Conclusion
In this work, we implemented a fuzzy controller for complex, non-linear systems in consideration of the time-vary delay and the limited communication capacity. We adopted the event-triggered mechanism in the design procedure to deal with the limited communication situation. By constructing the Lyapunov–Krasovskii function, the fuzzy controller is designed with parallel distributed compensation strategy for ensuring both asymptotic stability and guaranteed cost performance. Furthermore, a numerical simulation case study is performed for showing the correctness of the proposed approach. In our future researches, we would extend our current results to the cases with Type II fuzzy systems, which are more complex but with fuzzier modeling ability.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partly supported by the National Key Research and Development Program of China (2017 YFB1300200, 2017YFB1300203, 2020AAA0105900), the National Natural Science Foundation of China (Grant no. 61702516, 51705515, 61933001, 62003059), the Joint Research Fund between the National Natural Science Foundation of China (NSFC) and Shen Zhen (Grant no.U1713201) and the Research Fund from Science and Technology on Underwater Vehicle Technology Laboratory (No.6142215190103) and the China Postdoctoral Science Foundation (Grant No. 2020M673136).