
Abstract
Automated guided vehicles (AGVs) are extensively used in many applications such as intelligent transportation, logistics, and industrial factories. In this paper, we address the path planning problem for an AGV system (i.e. a team of identical AGVs) with logic and time constraints using Petri nets. We propose a method to model an AGV system and its static environment by timed Petri nets. Combining the structural characteristics of Petri nets and integer linear programming technique, a path planning method is developed to ensure that all task regions are visited by AGVs in time and forbidden regions are always avoided. Finally, simulation studies are presented to show the effectiveness of the proposed path planning methodology.
Introduction
With the rapid development of Industrial 4.0, automated guided vehicles (AGVs) have been extensively employed to handle complicated tasks efficiently. The path planning problem of AGV systems has been an active research topic in recent decades. Related works involve single AGV target reachability and multiple AGV obstacle avoidance.1,2 The problem aims to optimize several criteria such as travel distance and energy consumption under certain requirements: deadlock prevention, obstacle avoidance, and multi-task agents.3–8
An AGV system can be regarded as a discrete event system (DES) where the environment of the system is divided into several regions (or zones), and the vehicle movement from one region to another can be regarded as a discrete event.9–12 Petri nets (PNs) are a graph-based mathematical tool and are widely applied for modeling,13–18 control,19–29 and scheduling30–33 of DES, including AGV systems, manufacturing systems, and transportation systems. By assuming that some regions have a limited capacity, a deadlock prevention strategy is developed for robot planning in order to avoid collisions. 2 Hsieh and Kang 34 present a method to convert an AGV system into a control-based PN model and develop a control design method for avoiding collisions. Costelha and Lima propose a generalized stochastic PN model to address the robot task planning. 4 Petri net modeling for robotic assembly and trajectory planning is studied in McCarragher. 7 In the work of Kloetzer and Mahulea, 35 the running environment of an AGV system is partitioned into several regions where each region and the connection between two regions are represented by a place and a transition of PNs, respectively. Then, an online supervising procedure updates the paths whenever an AGV deviates from the planned trajectory. Mahulea and Kloetzer 36 propose an approach to find the shortest path of an AGV system with Boolean constraints. By modeling the environment as a state machine and transforming the Boolean constraints into a set of linear constraints, an integer linear programming problem (ILPP) is developed to find an optimal trajectoriy for an AGV system such that the total travel distance is minimized. In order to cooperatively finish some complex tasks, the types of AGVs are assumed to be different in a system. 37 Then, the task allocation problem for AGV systems is studied by using colored PNs. Recently, Luo et al. 9 develop an optimal PN controller for AGV systems in order to avoid collisions under the condition that some events are indistinguishable and uncontrollable due to the limited sensors and actuators.
In real-world systems, tasks usually have time constraints. Therefore, it is important to take the time information into consideration when dealing with the path planning problem for AGV systems. However, there are few works dealing with path planning for AGV systems with time constraints in the framework of DESs. Tanaka and Araki tackle the single machine scheduling problem and present an exact algorithm to find an optimal path. 38 Fanti 39 describe an AGV system using a colored timed PN and develop a control method to avoid collisions and deadlocks. Time windows are assigned to vehicles for the control at urban intersections in order to improve the throughput. 40 The robot rescue problem with time constraints is studied in Geng et al. 1 and a particle swarm optimization method is developed to obtain the best transition sequence. A real-time robot path planning algorithm is developed to minimize the total distance in a dynamic environment. 41
In this paper, we address the path planning for AGV systems with logic and time constraints using PNs. The tasks to be accomplished contain logic constraints on some regions along the trajectories and on the final states. In addition, we assume that some of the task regions should be visited in a predefined time window. We show that an AGV system and its static environment can be modeled by timed Petri nets (TPNs). Furthermore, an optimal path planning approach for AGV systems with time constraints is developed by solving an ILPP. Simulation studies show that the developed method is more accurate than the previous one. For the collision avoidance problem of AGV systems, it has been extensively studied in the literature (some recently published studies can be found in Refs.9,42 and is not the main focus of this paper.
This paper is structured in six sections. The basic concepts of PNs and the modeling framework are introduced in Section “Preliminary”. In Section “Problem statement”, the problem under consideration is formulated. In Section “Path planning for AGV systems using PNs”, we develop an ILPP for path planning for AGV systems with time constraints. Simulation studies are exposed in Section “Simulation results”. Conclusions and future works are finally drawn in Section “Conclusion”.
Preliminary
Petri net
A Petri net is a four-tuple
A marking is a mapping

where
Marking

where
A state machine is a PN such that each transition has at most one input and at most one output place. A PN system
Timed Petri net model for AGV systems
Inspired by the work in Mahulea and Kloetzer 36 that models an AGV system by a Petri net, we develop a method to model an AGV system with a timed Petri net by taking the timing information into consideration.
A TPN (
The environment of an AGV system that is known and static is partitioned into
Path requirement: Logic and time constraints
Among all the regions of an AGV system, we are interested in a set of regions that should be visited or avoided, denoted by
For each interest region

where
In addition, we assume that the time constraint associated with a task region
Given an AGV system and an environment with
For example, considering the following path requirement for an AGV system

it requires that region
Problem statement
In this paper, we deal with the path planning problem for AGV systems with logic and time constraints. In particular, we consider a team of
It is worth mentioning that an optimal solution for the path planning for AGV systems with logic constraints using PNs was developed in Mahulea and Kloetzer. 36 Nevertheless, the time constraints for AGV system are not discussed in Mahulea and Kloetzer. 36
Path planning for AGV systems using PNs
In this section, we first introduce the method developed in Mahulea and Kloetzer 36 to transform the logic constraint into a set of linear constraints. Since the path requirement for AGV systems considered in this paper is different from the one in Mahulea and Kloetzer, 36 we propose some methods to transform the logic and time constraints into a set of linear constraints. Finally, we develop an ILPP to obtain an optimal trajectory for an AGV system such that the total travel distance is minimized.
Transformation of logic constraint
where
For each interest region

Therefore, a task region
Since the trajectory of an AGV system is represented by the sequence of
where

Transformation of logic constraint under considered path requirement
Considering the path planning problem for the AGV system discussed in Section “Problem statement”, we assume that a task region
Logic constraint on the trajectory under considered path requirement
For any task region

As one can observe, constraint (7) is a logic “or” constraint. In the following proposition, we show how to transform constraint (7) into a set of linear constraints.
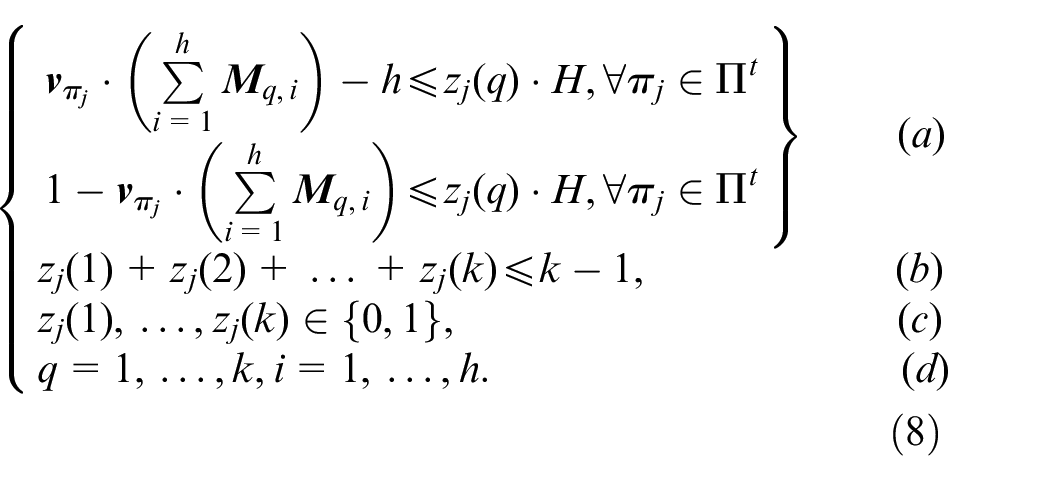
where
Proof: Constraints
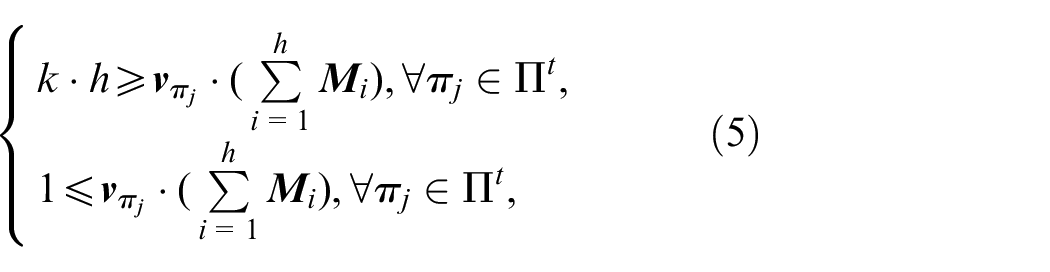
According to equation (5), it guarantees that AGV
Since
Logic constraint on the final state under the considered path requirement
For any task region

Similarly, we can transform the logic constraint (12) on the final state into a set of linear constraints by the following proposition.
where

Proof: This proof is analogous to the proof of Proposition 1. Constraints
Logic constraint on avoidance
It is easy to verify that the logic constraint on a forbidden region

Transformation of time constraint
In this subsection, we propose a method to transform the time constraint of an AGV system into a set of linear constraints. For any task region
We can transform the time constraint on the trajectory (16) into a set of linear constraints by the following proposition.
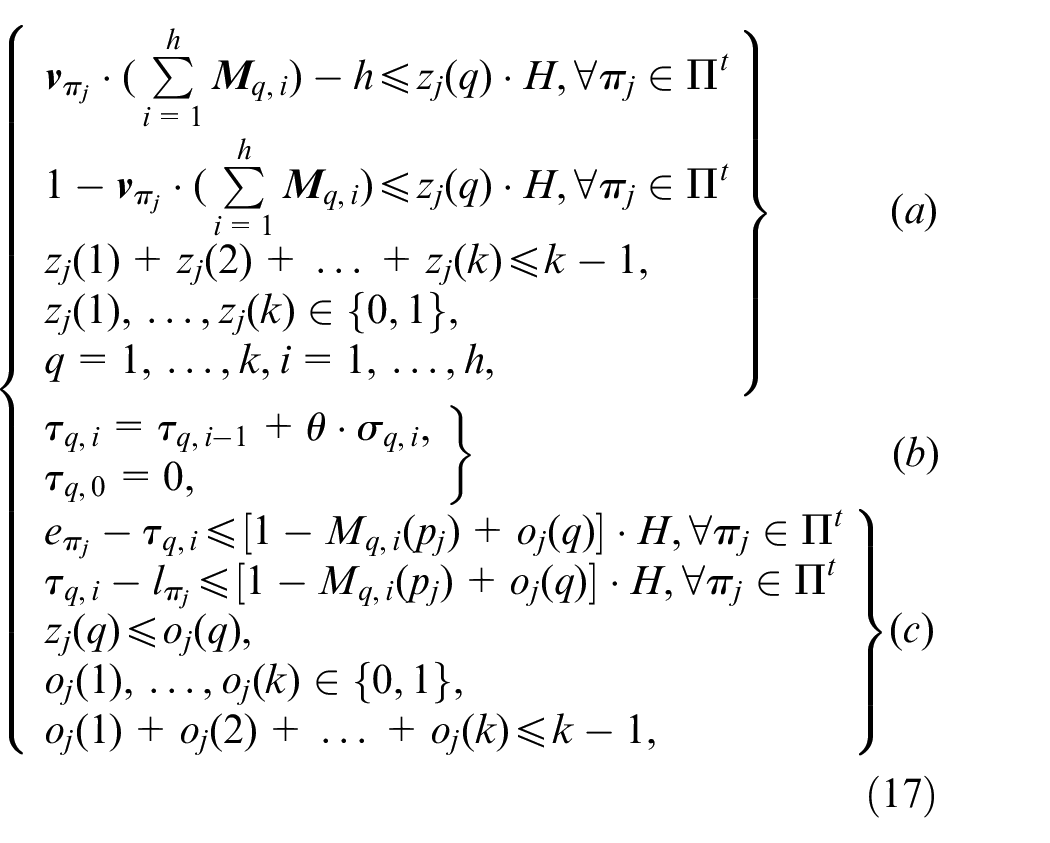
where
Proof: According to Proposition 1, constraint (17
For any AGV

Since
If region
Since

which guarantees that the time instant when the region

Similarly, we can transform the time constraint (22) on the final state into a set of linear constraints by the following proposition.
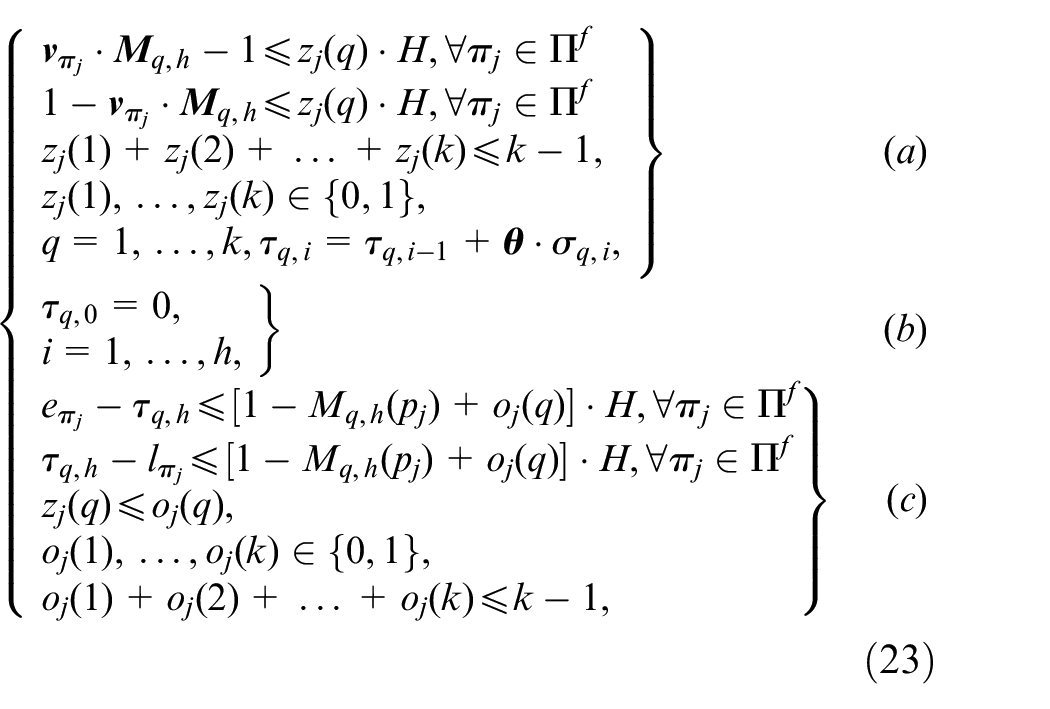
where

Proof: According to Proposition 2, constraint (23
step. By Proposition 3, constraint (23
Path Planning for AGV systems with an ILPP
Combining above results, we present an ILPP to solve the path planning problem for an AGV system with time constraints as follows:
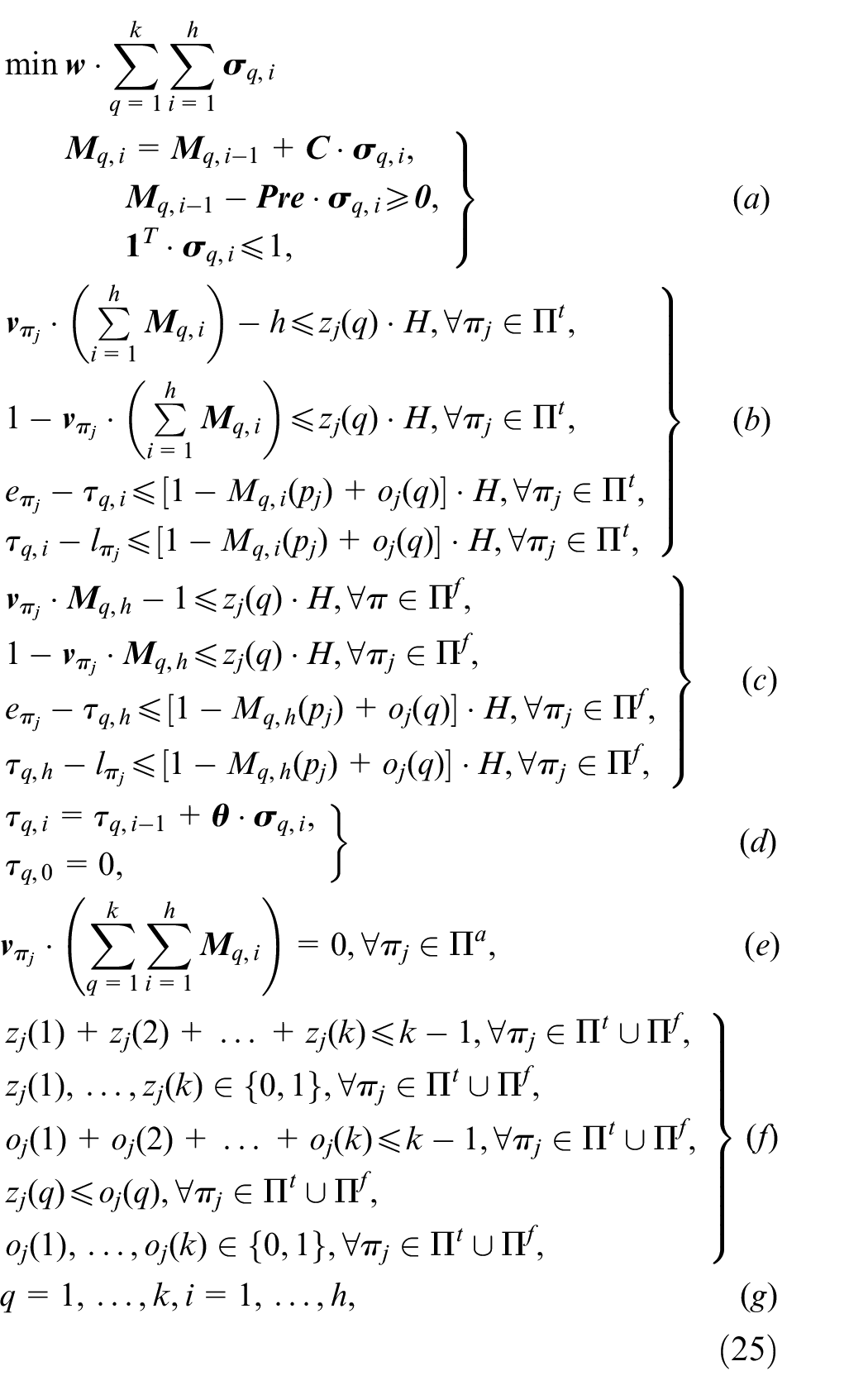
where
Note that parameter
Computational complexity
The optimization problem (25) is a standard ILPP whose computational complexity is well known as NP-hard. However, it can be efficiently solved by some off-the-shelf tools such as LINGO, MATLAB, and CPLEX. The computational burden of an ILPP is usually characterized by the number of variables and constraints. Problem (25) has
Simulation results
In this section, the illustration of the developed approach for the path planning problem of AGV systems with time constraints is made on an example that is taken from Mahulea and Kloetzer.
36
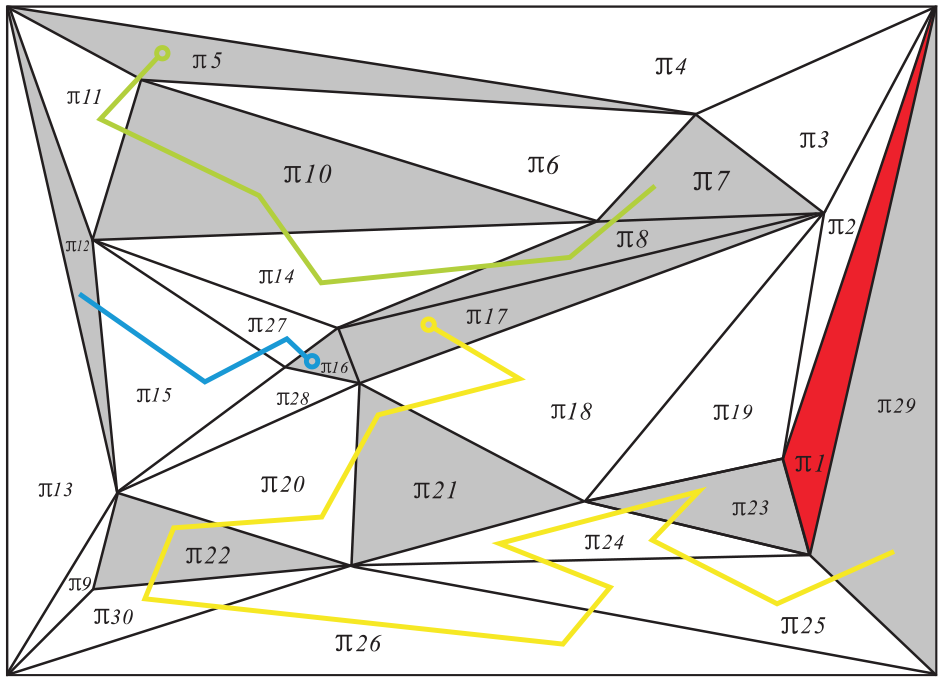
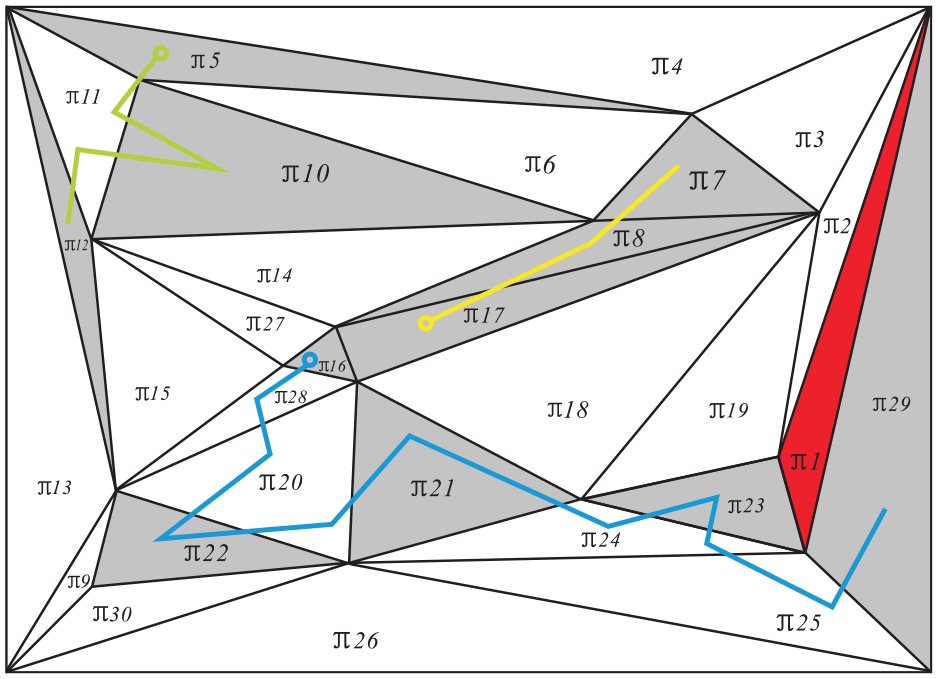
The environment of the system is partitioned by using a constrained triangular decomposition
46
and has 30 regions as shown in Figure 1, that is,
Simulation results obtained by the proposed approach.
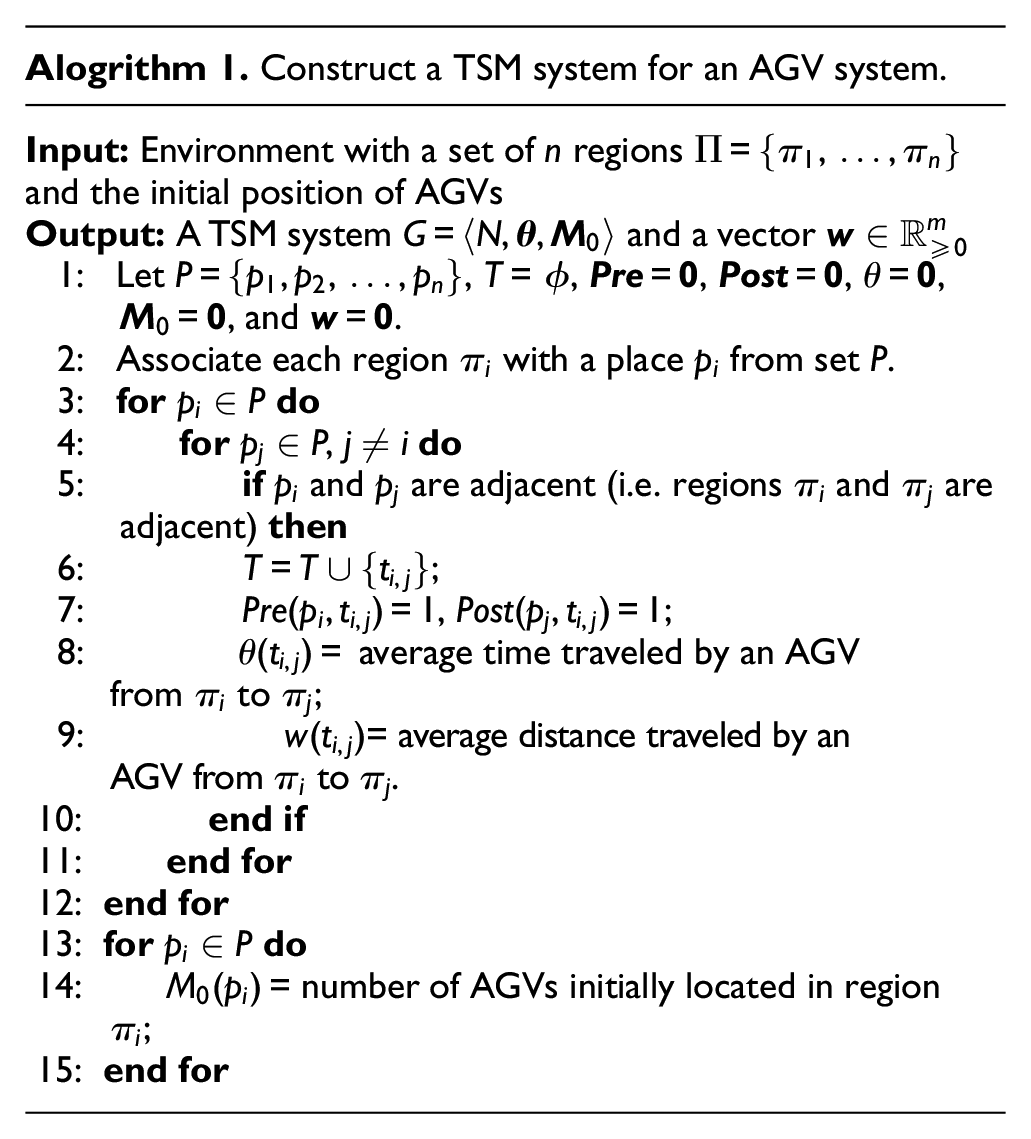
By Algorithm 1, we obtain a TSM system
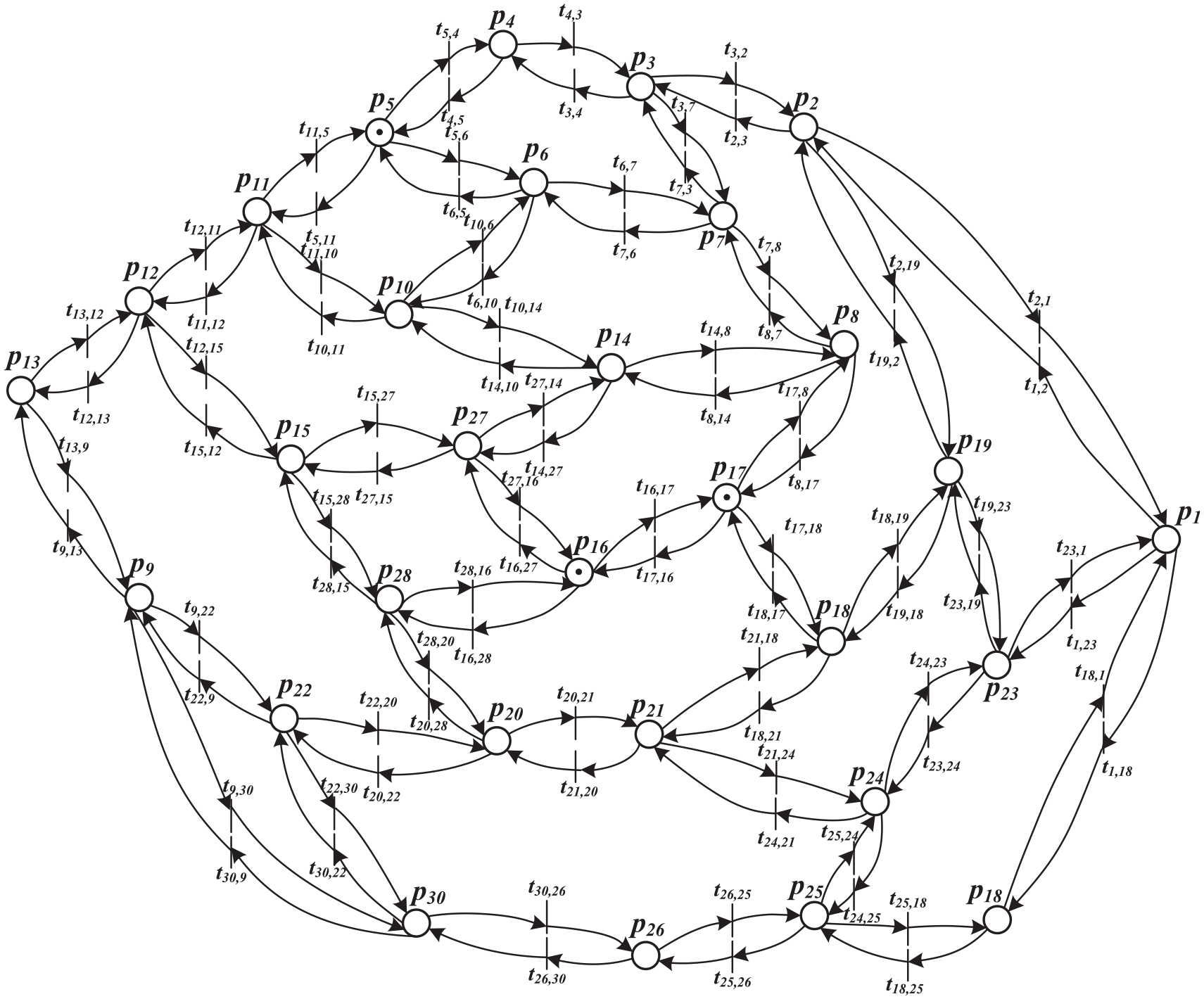
The TSM system
Consider a set of interest regions as follows:
it implies that regions

The developed approach is implemented by MATLAB with the ILPP toolbox YALMIP
47
and Optimal Solver Gurobi on a Windows operating system with i5-7500 CPU 3.40 GHz and 4 GB memory. By solving ILPP (25) with a maximum number of steps
yellow AGV:
blue AGV:
green AGV:
In addition, the approach developed in Mahulea and Kloetzer
36
is implemented by ignoring the time constraints for task regions
yellow AGV:
blue AGV:
green AGV:
Simulation results obtained by the approach developed in Mahulea and Kloetzer. 36
In Table 1, we compare the visiting time of the task regions obtained by the proposed approach and that developed in Mahulea and Kloetzer.
36
The method developed in Mahulea and Kloetzer
36
aims to find the optimal trajectories of AGVs such that all the task regions are visited (without specifying the visiting time), while the total travel distance is minimized. Therefore, the time constraints considered in this paper cannot be implemented by the method developed in Mahulea and Kloetzer,
36
which means that the visiting time of the task regions may fall into the time window (e.g. region
Visiting time of the task regions obtained by the proposed approach and that developed in Mahulea and Kloetzer. 36

Conclusion
This paper deals with the path planning problem for AGV systems with logic and time constraints using PNs. We propose an analytical approach to ensure that task regions are visited by AGVs in time and forbidden regions are avoided. We propose a method to model an AGV system and its static environment by timed Petri nets. Combining the structural characteristics of Petri nets and integer linear programming technique, a path planning method is developed to obtain the optimal trajectories of AGVs such that the total travel distance is minimzed. Simulation studies are presented to show that our developed method is more accurate than the previous method.
It should be noticed that all the AGVs are assumed to be identical, that is, a single type of AGVs is considered. From a practical point of view, multiple types of AGVs may be needed to cooperatively finish some complex tasks. Our future work focuses on the path planning problem with time constraints for AGV systems that contain multiple types of AGVs.
Footnotes
Author’s Note
Zhou He and Gongchang Ren are also affiliated with Shaanxi Key Laboratory of Complex System Control and Intelligent Information Processing, Xi’an University of Technology, Xi’an China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant Nos. 61803246 and 62003201, the China Postdoctoral Science Foundation under Grant No. 2019M663608, the Shaanxi Provincial Natural Science Foundation under Grant No. 2020JQ-733, the Science and Technology Plan of Weiyang District under Grant No 201914, and the Shaanxi Key Laboratory of Complex System Control and Intelligent Information Processing under Grant No. SKL2020CP03, Xi’an University of Technology.