
Abstract
A piecewise fast multi-power reaching law (PFMPRL) is proposed aiming at the problems of chattering and slow convergence in the reaching phase of sliding mode control (SMC). In this paper, the fast power reaching law and the double power reaching law are combined, and a nonlinear function is introduced to design the exponential term in PFMPRL. The proposed method ensures the characteristic of fast convergence of the system at all the phases of tendency. The characteristic of fixed-time convergence has also been satisfied. The study proves that the system state can converge to steady-state error bounds within a finite time in the presence of system uncertainty and bounded external disturbance. Compared with the existed methods, the proposed method has shorter convergence time and smaller steady-state error bound. To suppress the influence of model uncertainty and disturbance in system control, a non-linear disturbance observer (NDO) is introduced, and combined with the reaching law-based non-singular terminal sliding mode control (NTSMC), is applied to the cart inverted pendulum system. Simulation results and numerical analysis verify the effectiveness and superiority of this approach.
Keywords
Introduction
SMC algorithms is a powerful technique and a variable structure method which has the advantages of strong robustness and fast response speed, and is widely used in the stability control of uncertain systems.1–5 The existence of the switching item of sliding mode control gives it some anti-interference capabilities to model uncertainty and external disturbance, but it also causes serious chattering phenomenon. Chattering phenomenon not only affects the system control accuracy, but also results in a waste of energy in practical application, and can even cause instability in the system by exciting the high frequency dynamics of the unmodeled part. Generally, sliding mode control can be split into two regions—the reaching phase and the sliding phase. As long as the system state reaches the sliding surface, it is invariant to parameter uncertainty and external interference6,7; however, it will still be affected by disturbances during the reaching phase. Therefore, how to eliminating chattering while also increasing the reaching rate has been an important research topic in the field of sliding mode control.8–12
To solve the chattering problem in sliding mode control systems, many effective researches have been carried out by scholars both in China and abroad. Boundary layer method,13–15 also known as quasi-sliding mode method, uses saturation function instead of sign function to keep the system state near the field of sliding mode surface, forming a “quasi-sliding mode.” Although it effectively weakens chattering, it also affects the control accuracy. High-order sliding mode control16–20 places the switching term of the sliding mode surface function in the first or high-order derivative of the control input, thus greatly reducing chattering. However, it is difficult to obtain the first or high-order derivative of the sliding mode variable, and it is difficult to apply it in the first-order system. Terminal sliding mode control21–23 can not only effectively eliminate chattering, but also ensure the convergence of system state in a finite time. However, its convergence speed is slower compared with the traditional exponential reaching law of sliding mode control. The SMC method,24–27 based on the reaching law, is similar to the terminal sliding mode control in its mathematical structure, 28 except that the latter is mainly aimed at the dynamic quality of the sliding mode. Compared with the above control methods, the method with the reaching law improves the dynamic performance of the system in the reaching stage of the sliding process while weakening chattering. The design of the approach law has an important influence on the convergence speed, control accuracy and stability of the system.
Gao 29 proposed isokinetic reaching law, exponential reaching law (ERL), power reaching law (PRL) and general reaching law for the chattering phenomenon in sliding mode system control, which laid the foundation for the study of approach law. In ref., 30 combining the advantages of ERL and PRL, a fast power reaching law is proposed (FPRL), which is distant from the sliding mode surface and can enter into the sliding mode smoothly, thus weakening chattering. According to the double power reaching law (DPRL) proposed in ref., 31 Li and Cai 32 found a specific class of DPRL and established the convergence formula of the DPRL, which further accelerated the convergence speed when it was far from the equilibrium point, but the dynamic property near the equilibrium point was not as good as the fast power approach law. Liao et al. 33 combined the fast power and double power reaching laws through the fal function, and proposed a double power combination function reaching law (DPCFRL), and which has the former’s characteristics when it is close to the equilibrium point and the latter’s characteristics when it is far from the equilibrium point, but the convergence speed of the reaching law function is quite different in the two stages. In ref., 34 according to the structure of fast power reaching law, a new variable exponential power reaching law (VPRL) is proposed, which realizes the adaptive adjustment of the approaching speed through the design of the power term and improves the system’s approaching speed. However, it cannot maximize the approaching speed because it is limited by the form of the fast power reaching law when it is far from the equilibrium point. In order to consider the approaching speed when both moving away from and near the equilibrium point, the convergent law in the form of combinatorial variable exponential is a more effective choice.
In this paper, in order to improve the convergence speed in each stage of the reaching phase, a piecewise fast multi-power reaching law is proposed. The main contributions of this paper are summarized below:
By designing a nonlinear function, we divide the approaching process of the system into two stages. When it is remote from the equilibrium point, it is characterized as the property of double powers reaching law, and when it is near the equilibrium point, it is characterized as the property of fast powers reaching law; the coefficients of the exponential term will be adjusted according to the different phases. It greatly improves the approach rate of the system throughout the process approach.
The fixed-time convergence characteristics and steady-state error bounds of the proposed reaching law are analyzed. The theoretical analysis proves its superiority and effectiveness.
In consideration of the presence of disturbances on the system, it will affect the control performance, a disturbance observer based on tracking differentiator is proposed to estimate the uncertainty of system parameters and external disturbance, and its effectiveness is analyzed theoretically.
Simulation results and numerical analysis show that the convergence speed and steady-state error bounds of the proposed approach law are better than other approaches, and the proposed PFMPRL has better dynamic quality than the existing reaching law method when applied to the stability control of the inverted pendulum system by combining the non-singular terminal synovial control.
In the rest parts of this paper, in section “Piecewise fast multi-power reaching law,” the piecewise fast multi-power reaching law (PFMPRL) is proposed. In section “Dynamic performance analysis,” the performance of the reaching law is analyzed, including the characteristic of fixed-time convergence and the steady-state error bounds. In section “Simulation,” the proposed reaching law is compared with the existing reaching law by simulation and numerical analysis, and it is applied to the inverted pendulum system. Section “Conclusion” concludes the paper.
Piecewise fast multi-power reaching law
Related work
In refs.31,33 fast power approximation law and double power approximation law were proposed respectively:


Where,
If external disturbances are not considered, the above two reaching laws converge the sliding mode surface
Take the Lyapunov function


The following two cases are discussed:
1)
At this point, the sliding mode state
Where,
2)
At this point, the sliding mode state
Where,
From the above, when the system state is remote from the sliding mode surface, the DPRL has a faster reaching rate, and when the system state is next to the sliding mode surface, the FPRL has a faster reaching rate. Further analysis of the convergence time equations (5)–(8) of the two reaching laws shows that the values of
In ref. 34 the variable exponential power reaching law is shown as follows:

Where,
Design of piecewise fast multi-power reaching law
According to the analysis of the reaching law method proposed above, combining the advantages of fast power and double power reaching laws in different stages, and the idea of variable exponential reaching law for adaptive adjustment of exponential term, a piecewise fast multi-power reaching law is proposed:

Where,



Where
When


The proposed new reaching law method combines the advantages of the FPRL and DPRL; whether it is remote from or next to the sliding mode surface, it has the characteristics of rapid approach and no chattering. Through the design of the nonlinear function, the power term parameters are adjusted according to different stages, which further improves the approach rate, and there is a maximum convergence time independent of the initial state. When there is a bounded disturbance, the state of the system can also converge within the bound of steady-state error in finite time.
Dynamic performance analysis
The characteristic of fixed-time convergence
In order to facilitate the analysis, the definition and lemma of fixed-time convergence are first introduced before the characteristic analysis of the reaching law 38 :
Definition 1
The origin of a system is called as fixed-time attractive if it is uniformly finite-time attractive with an attraction domain
Lemma 1
Let a continuous function

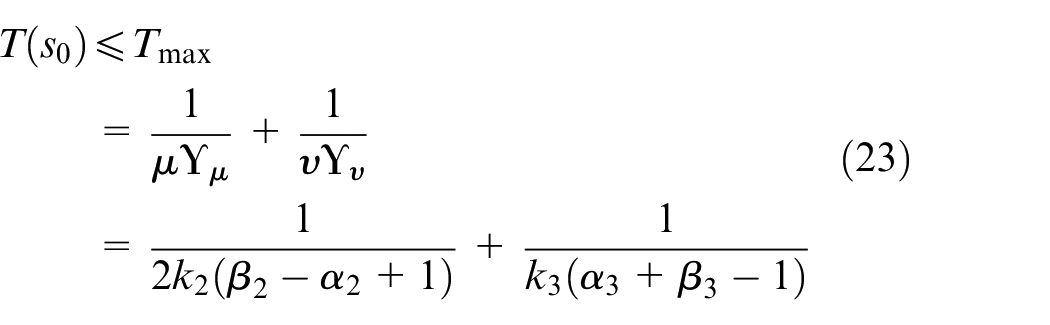
then the origin of the system can be called global fixed-time convergence equilibrium point, furthermore, the maximum settling time is estimated by:

Based on the above lemma 1, 38 the following theorem is given to demonstrate the characteristic of fixed time convergence of the proposed algorithm.
Theorem 1
For system (10), system states

Proof
Define the Lyapunov function as follows:

It is clear that
Find the time derivative of Lyapunov function
Where,
In conclusion, theorem 1 is proved.
Analysis of steady-state error bound
The above analysis shows that PFMPRL can converge to the equilibrium point
Lemma 2
When
There are real numbers
Then the function
According to Lemma 2, when considering the parameter uncertainty and external disturbance of the system (10), the following theorem is produced:
Theorem 2
Consider systems with uncertainties and external disturbances:

Where

Proof
Define the following Lyapunov function:

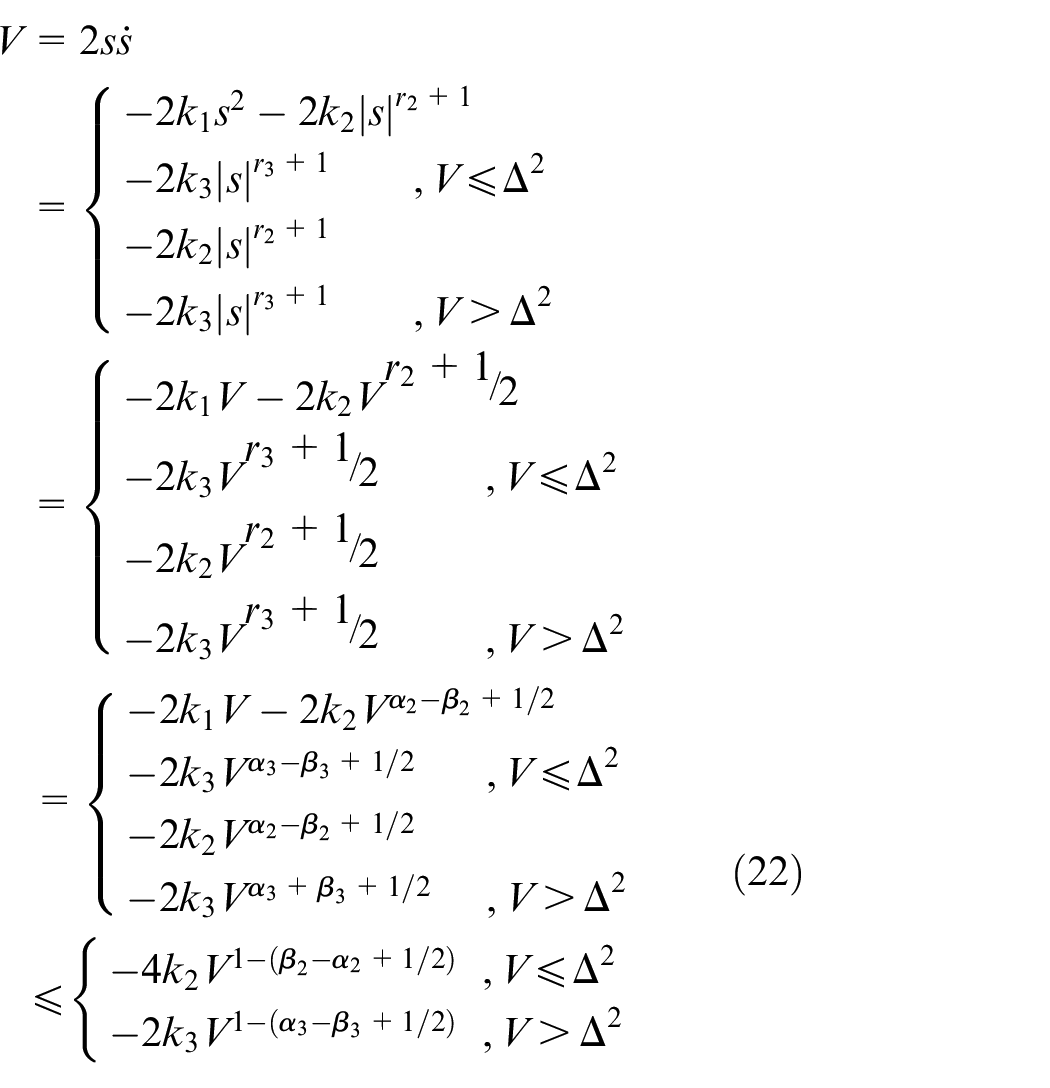
Find the time derivative for (27), and substitute equation (24) into it:
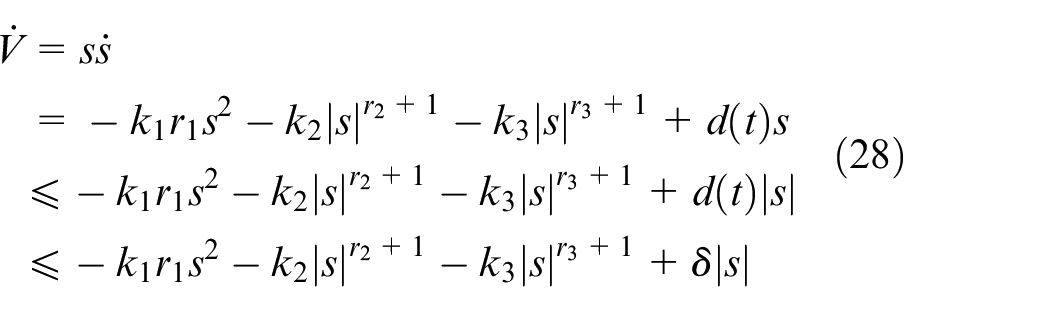
Where, as can be seen from equation (11), the term of
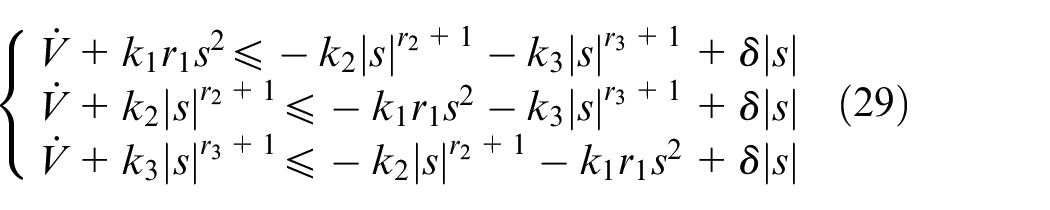
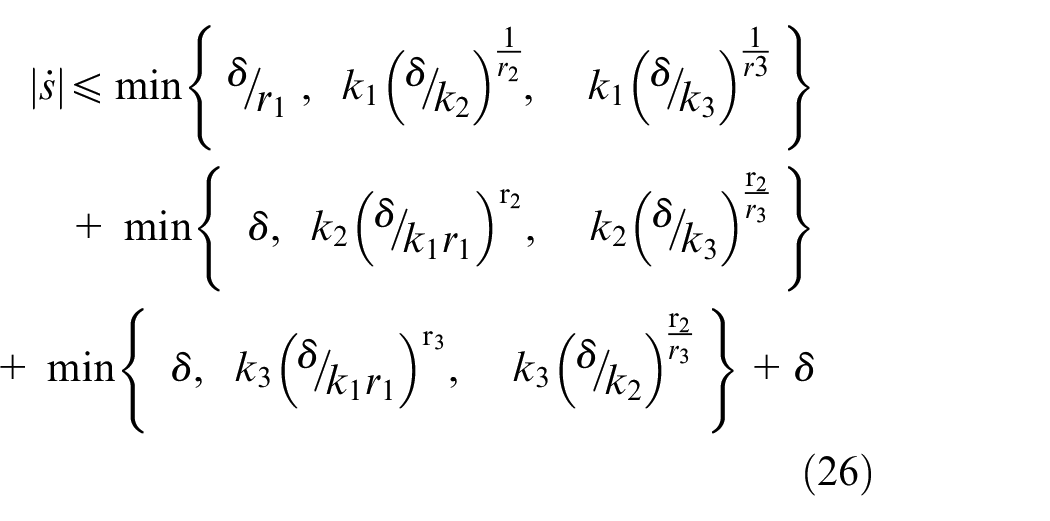
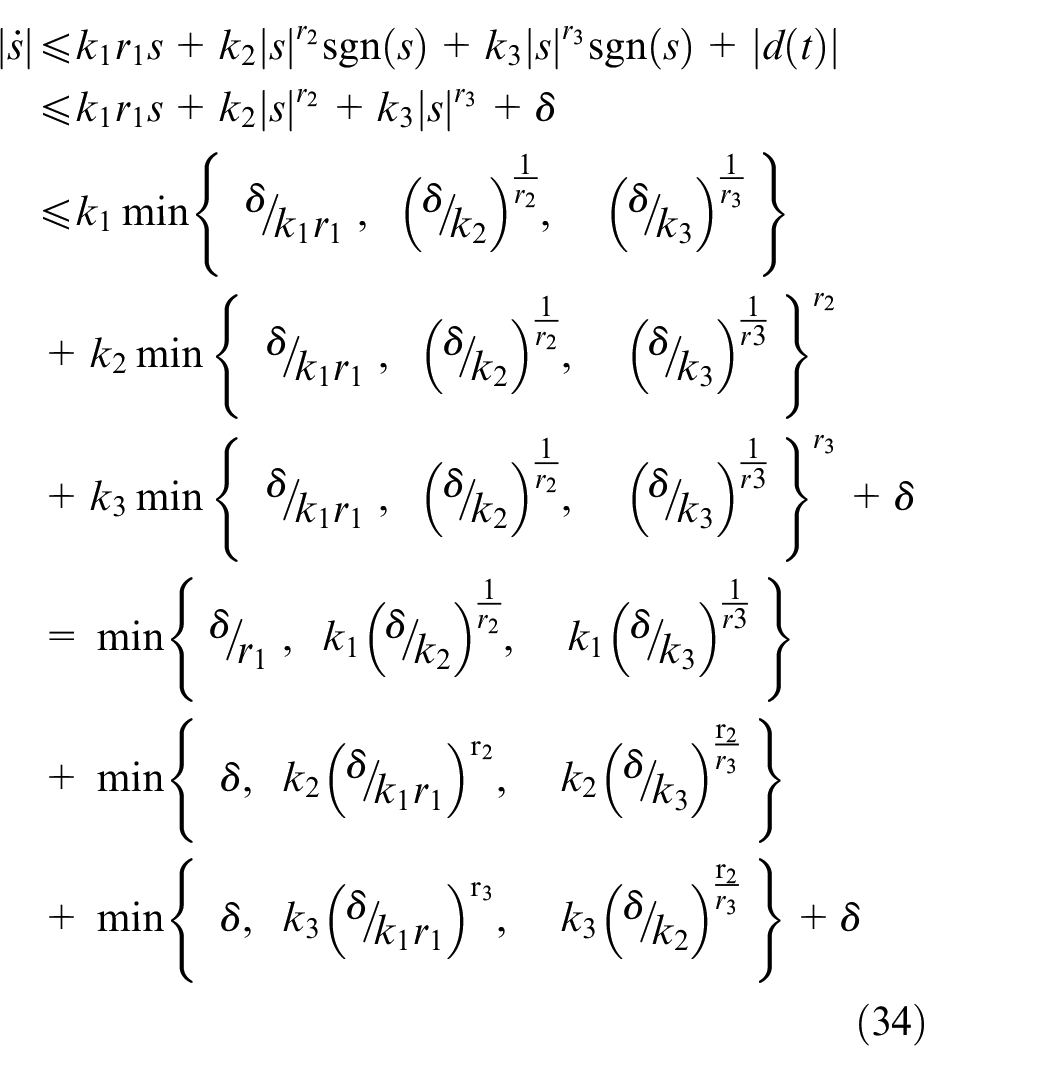
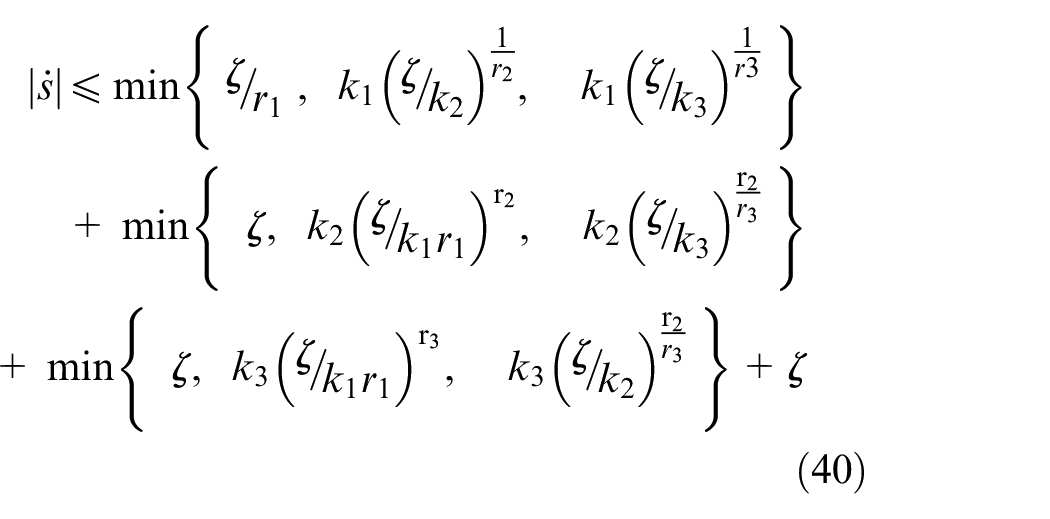
For equation (29), if satisfies one of

Where, corresponding to equation (29),



Because only one of these conditions has to be satisfied, state
In conclusion, theorem 2 is proved.
Design of disturbance observer
As can be seen from section “Analysis of steady-state error bound,” when there is a bounded interference in the system, the sliding mode variable
Without loss of generality, we consider the second order nonlinear control system of the form:

Where,
Lemma 3
For the following system 42 :

where,
Lemma 1 provides a general design method for a disturbance observer combined with a tracking differentiator. Therefore, it is possible to further applied to the design of disturbance observer by constructing a suitable tracking differentiator.
The hyperbolic tangent tracking differentiator is simple in form, with few parameters to be set, and, because its function is smooth and continuous, it can effectively suppress the output chattering. The tracking differentiator can guarantee the stability and convergence of the proposed disturbance observer, and has excellent tracking performance. The outstanding advantage of the proposed disturbance observer is that it can estimate almost all types of disturbances and does not need the prior information of disturbances. The design of a TANHTD-NDO is shown below:

where
The defined variable

According to theorem 2, the states

Where the nonlinear disturbance observer based on the tracking differentiator has good tracking performance to the disturbance and can accurately estimate the disturbance, disturbance observation error
Simulation
Platform introduction
1. Consider a SISO system:

Where
a. FPRL

b. DPRL

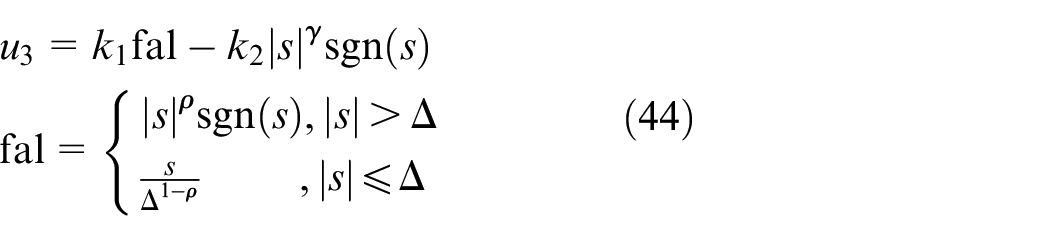
c. DPCFRL
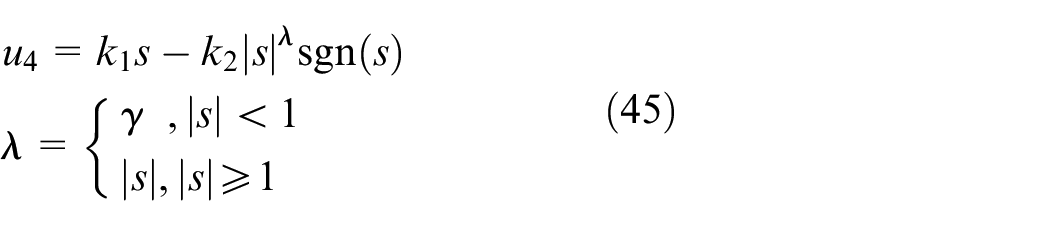
d. VPRL
e. PFMPRL

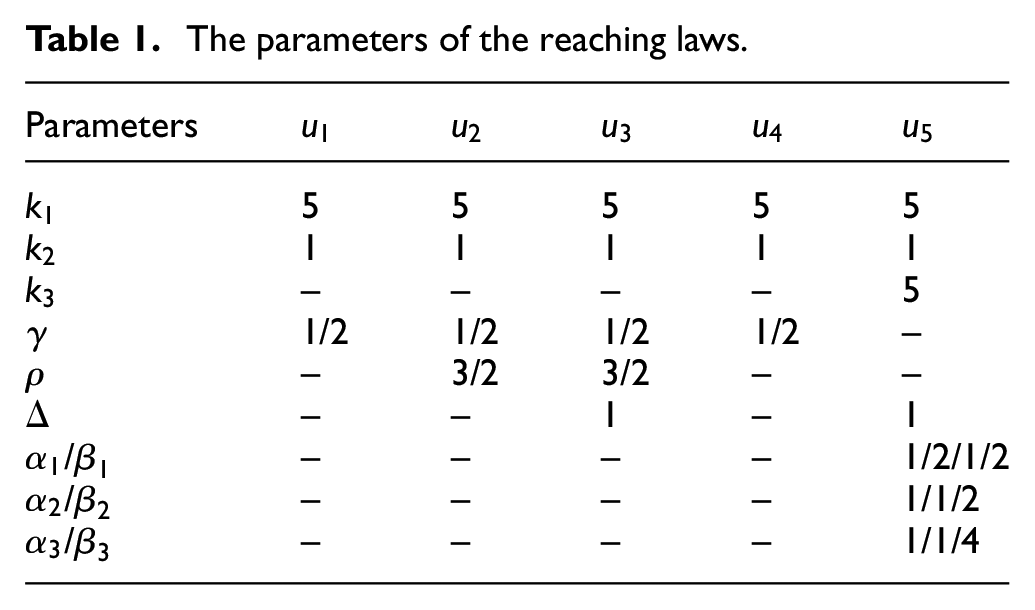
Among them, in order to more objectively compare and simulate each reaching law without loss of generality, the parameters in the literature were slightly modified. The parameter settings of each reaching law are shown in Table 1.
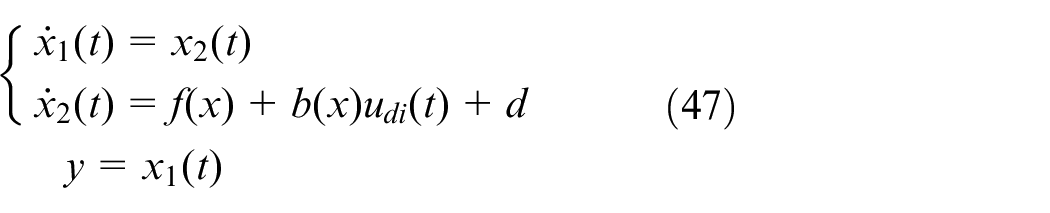
2. Consider a cart inverted pendulum system, where the speed and smoothness of its dynamic response are the main performance indicators. In order to verify that the proposed method also has fast convergence performance in practical application, and can ensure its superiority, the model of the inverted pendulum system could be described as 43 :
The parameters of the reaching laws.
Where
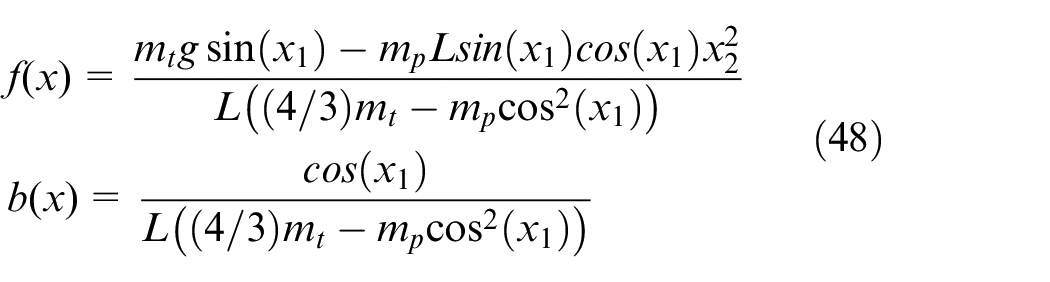
For the simulation purpose, the parameters of the cart-pole system are considered as
The sliding surface is designed as

Where
Simulation of SISO system
Simulation comparison of convergence characteristics
For the system (41), when disturbance
Comparison of convergence conditions of
Comparison of convergence conditions of
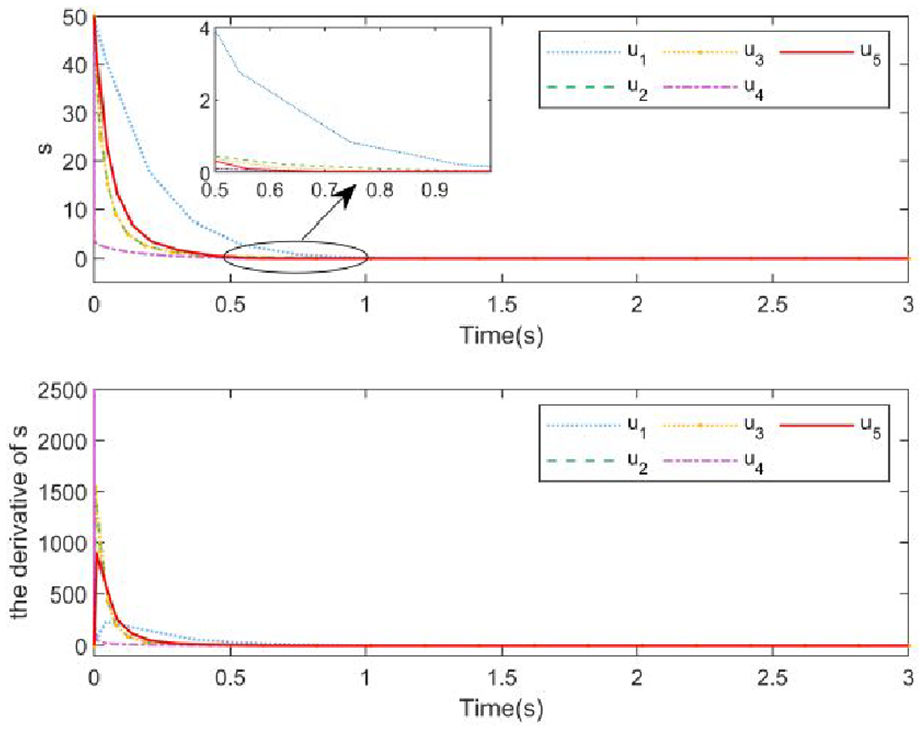
Comparison of convergence conditions of
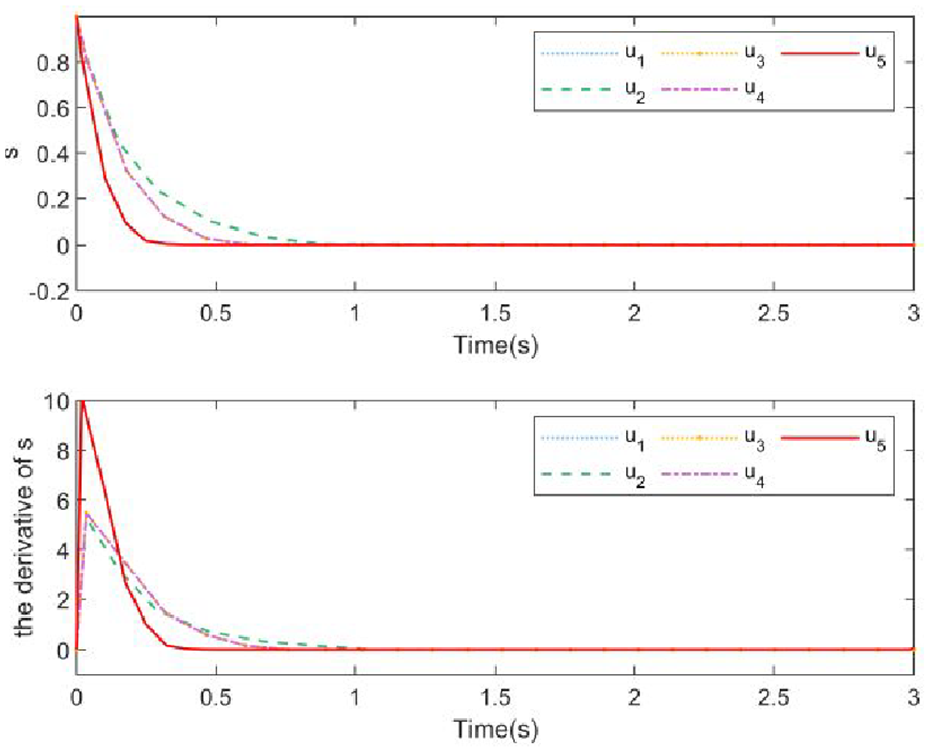
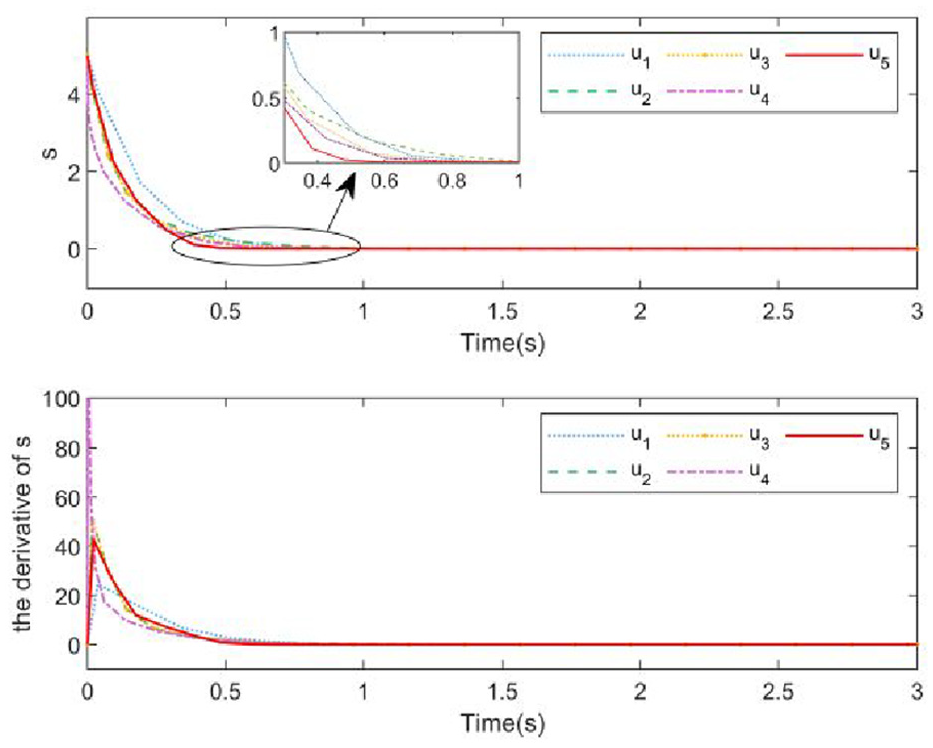
Analysis of Figures 1 to 3 and the results can be seen, all the reaching laws can make the sliding mode variable
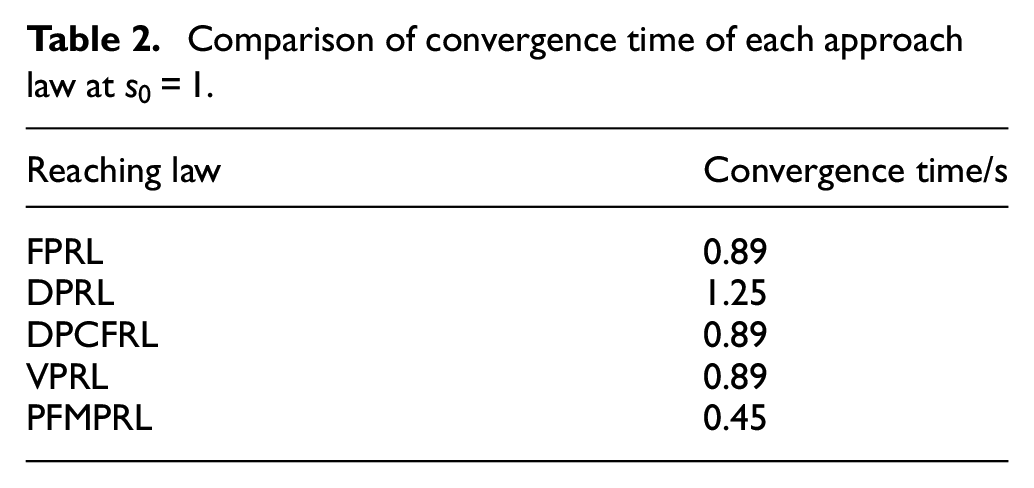
Comparison of convergence time of each approach law at
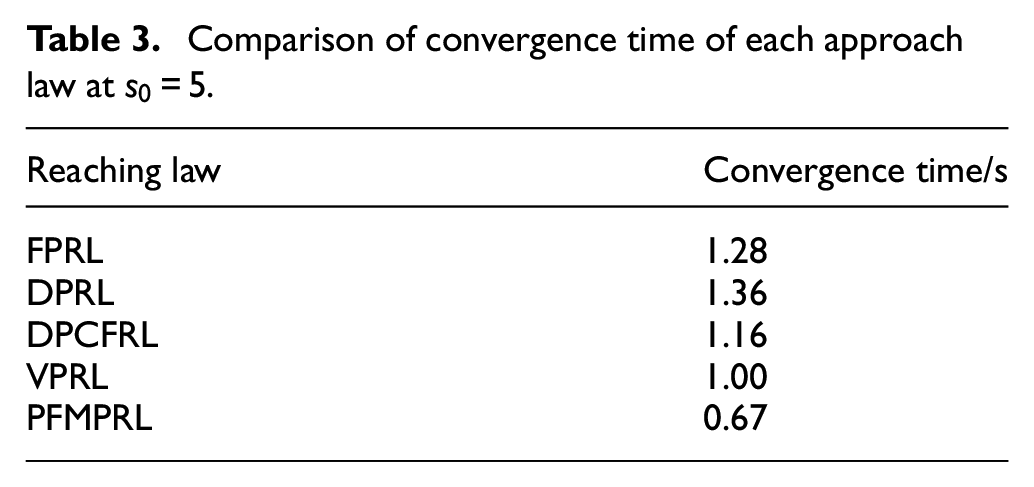
Comparison of convergence time of each approach law at
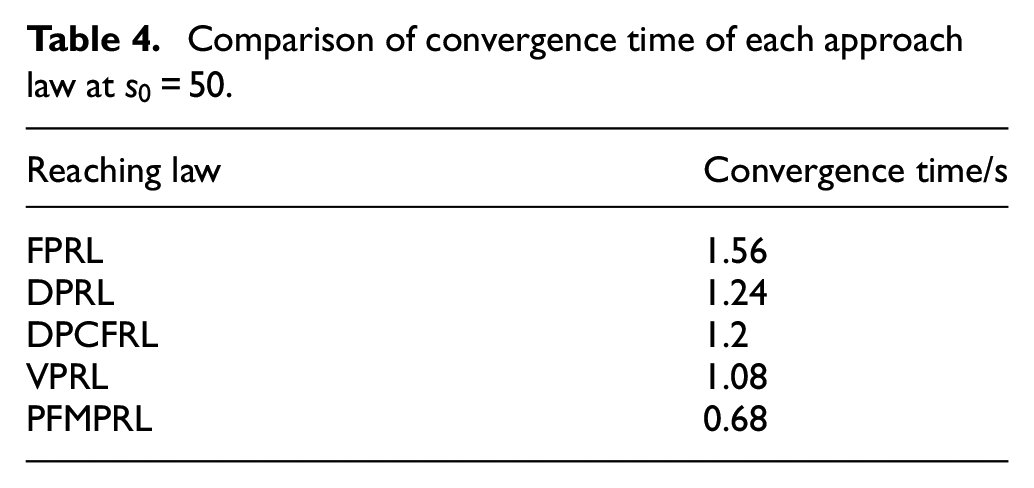
Comparison of convergence time of each approach law at
In order to show the influence of parameter a on the approach rate, since the exponential parameter of the proposed approach law method is designed by the nonlinear function with reference to parameter a, the values of a are 0.1, 0.5, and 0.8, respectively. In the case of
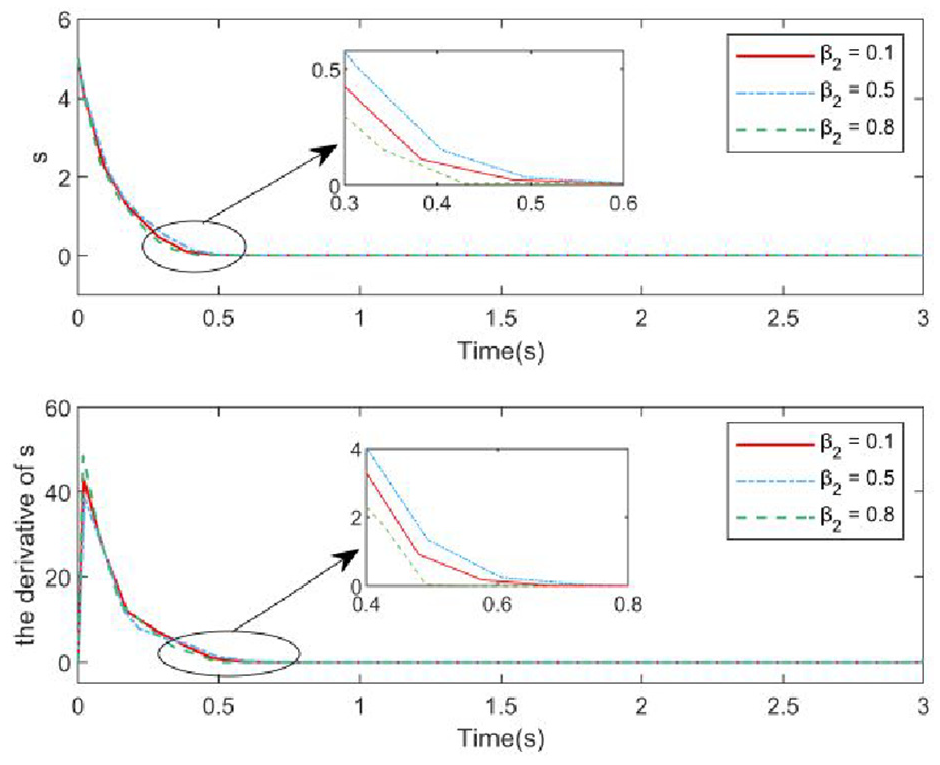
Comparison of convergence conditions of
By comparing Figures 1 to 3 and Tables 1 to 3, it can be seen that FPRL is sensitive to the initial value of the state, so it cannot be seen that there is an upper limit of convergence time; the proposed reaching law and the others are less affected by initial state values, according to theorem 1, there is an upper limit of maximum time convergence, and within the range described in equation (23). In conclusion, the proposed approach law has better dynamic characteristics regardless of whether the initial value of the sliding mode state is close to or far from the equilibrium point.
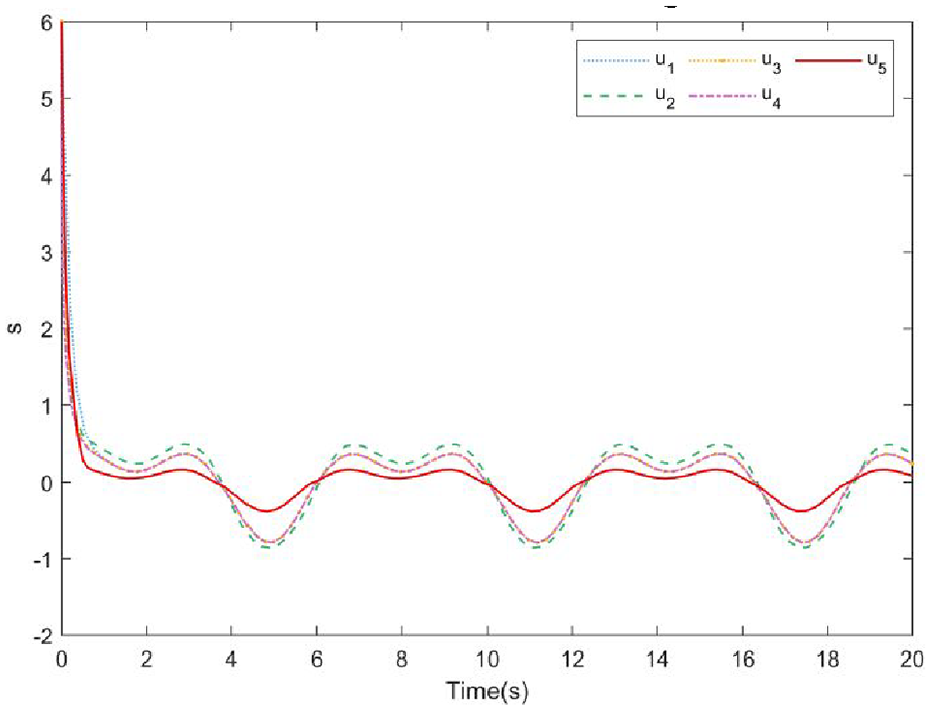
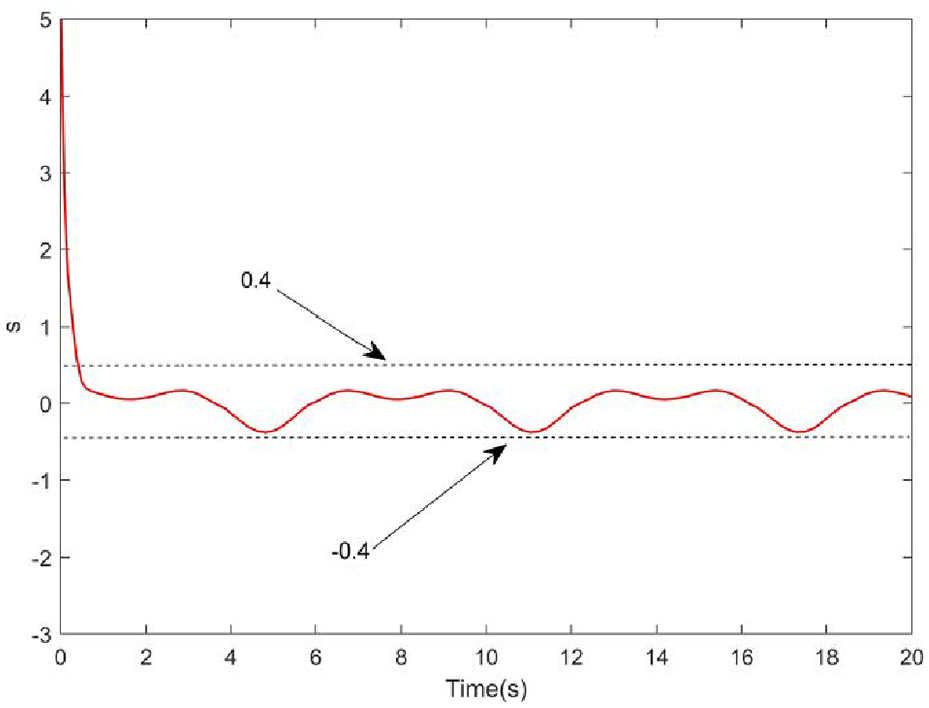
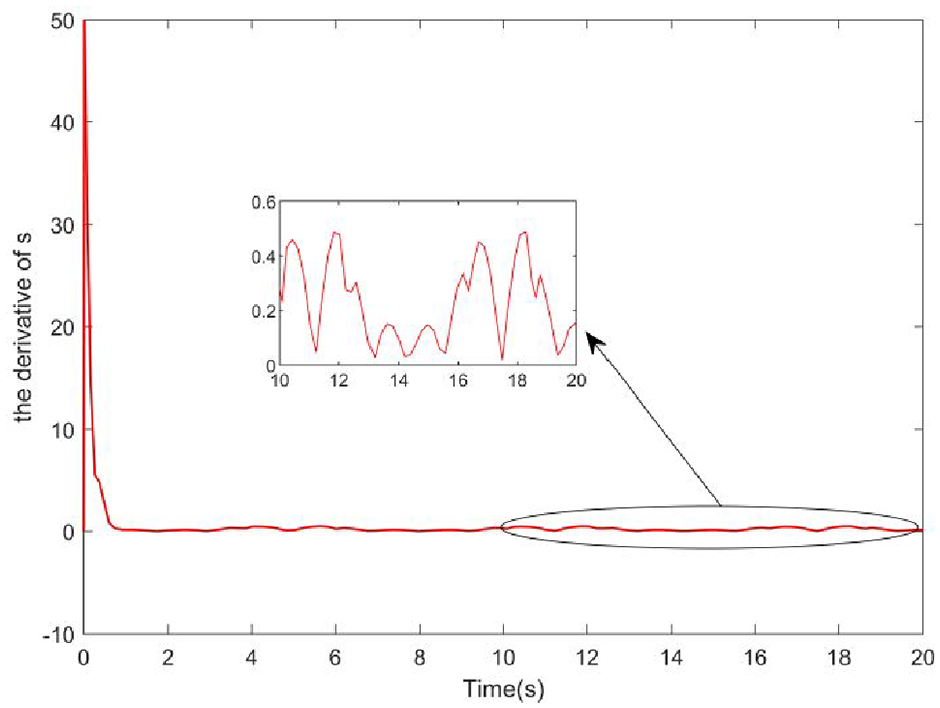
Simulation comparison of steady-state error
For the system (41), parameter uncertainty and external disturbance are considered as:

At this point, set the initial value of sliding mode state as
Comparison of convergence conditions of
Convergence condition of
Convergence condition of
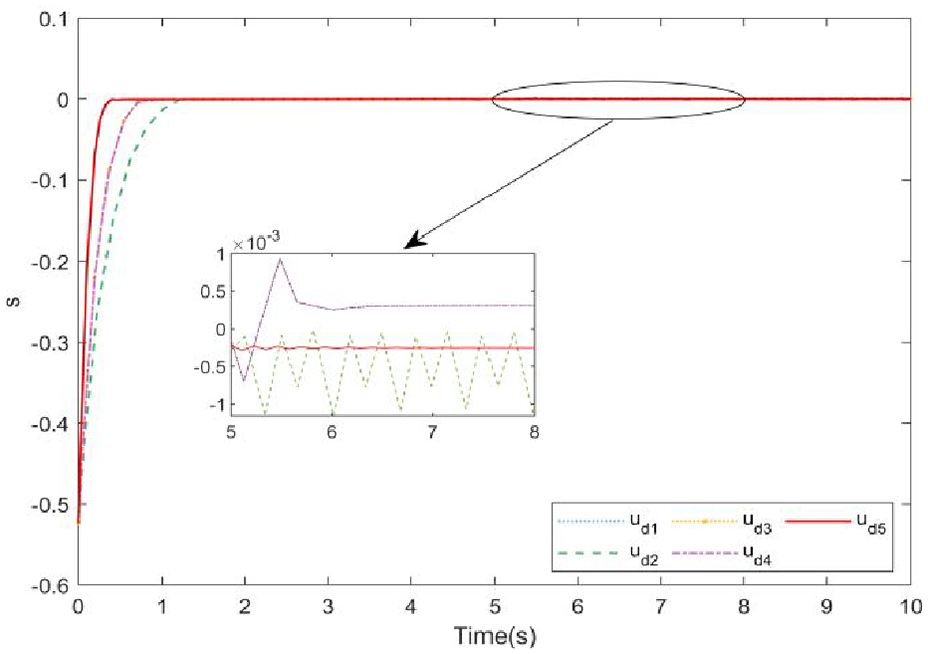
Figures 6 and 7 show the convergence of sliding mode variable
Comparison of steady-state error bounds for each reaching law.
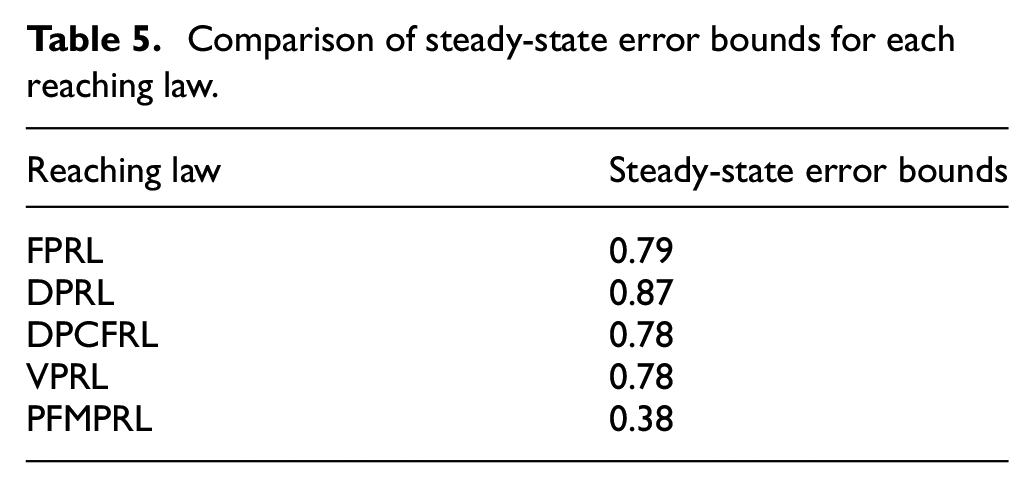
Simulation of inverted pendulum system
For the system (47), when disturbance
Pendulum angle and angular velocity response curves of each reaching law method.
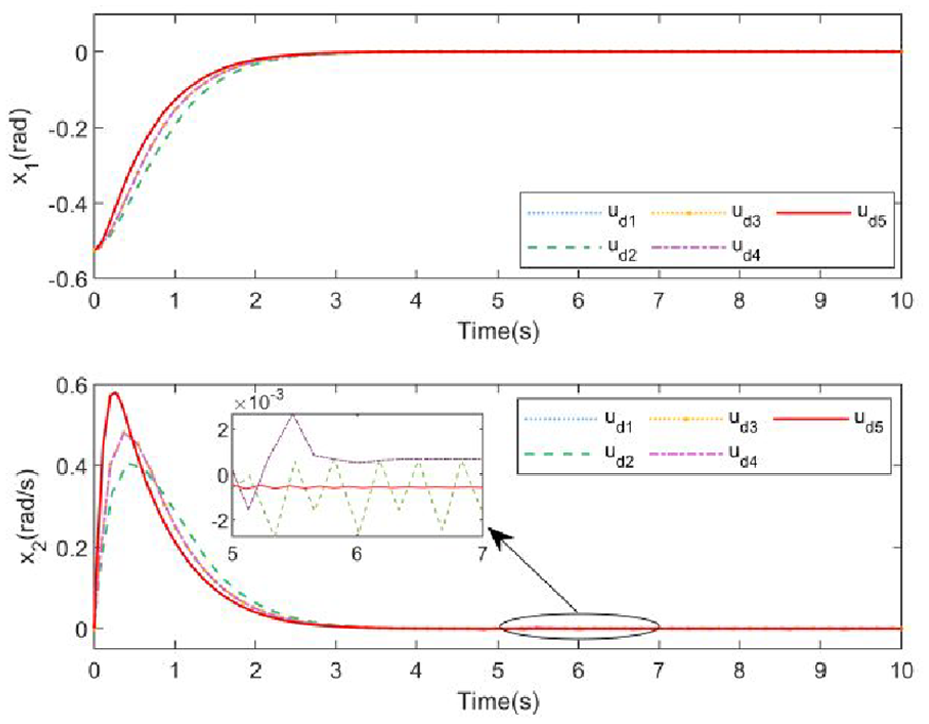
Control input response curve of each reaching law method.
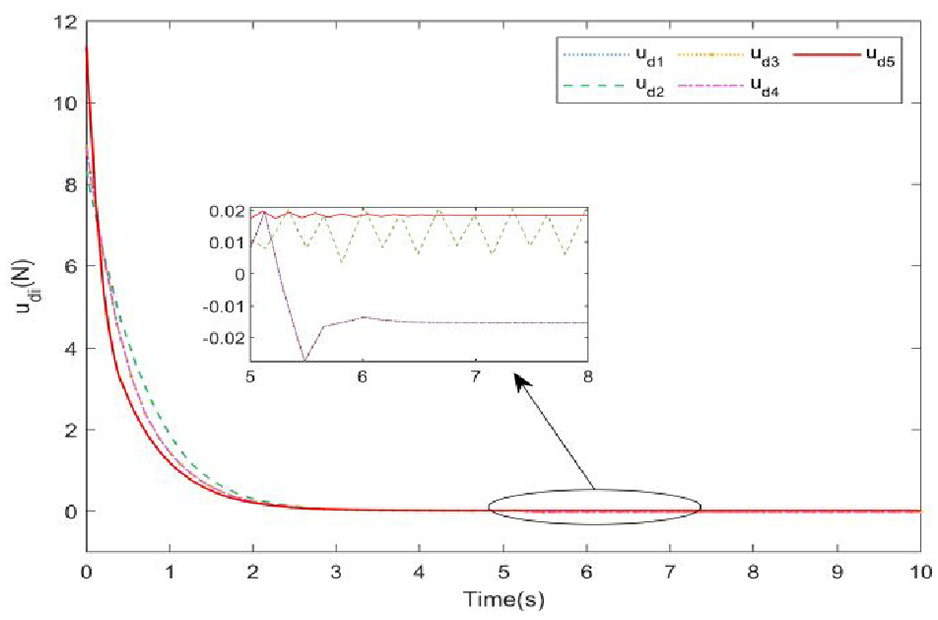
Sliding mode s response curve of each reaching law method.
Three-dimensional curve of system phase trajectory.
It is easy to see from Figures 8 and 11 that the proposed PFMPRL combined with non-singular terminal sliding mode convergence has the fastest speed, which can make the system in a stable condition within a fixed time with less chattering. As can be seen from the curve of phase trajectory, the control process of this method is smooth and without jitter, which is consistent with the response curve of system pendulum angle and angular velocity, and has strong robustness. Figures 10 and 11 represent the control input curve and the sliding mode surface curve. It is observed that the control input and the sliding mode surface of the proposed method converge in a shorter time, remain stable with almost no chattering and have better dynamic characteristics.
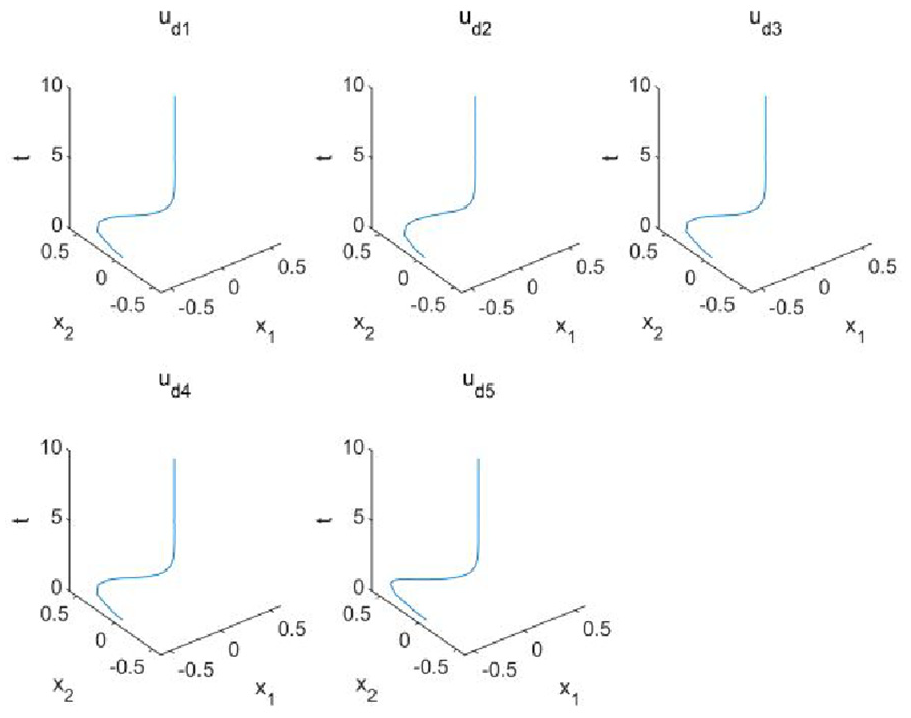
For the system (47), when the disturbance
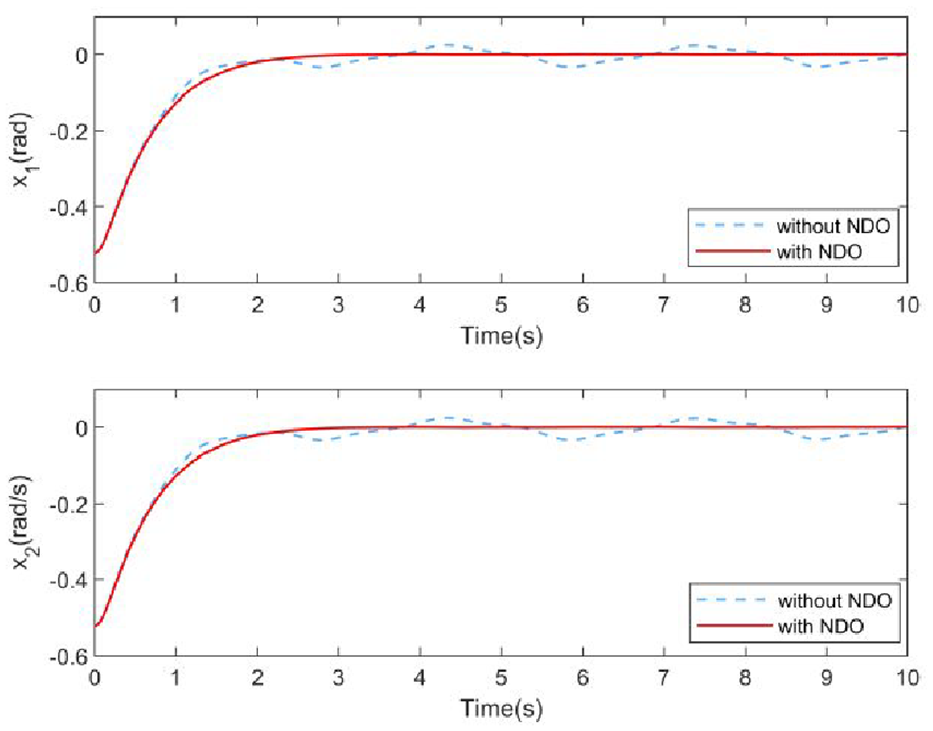
Comparison of system state response curves with or without disturbance observer.
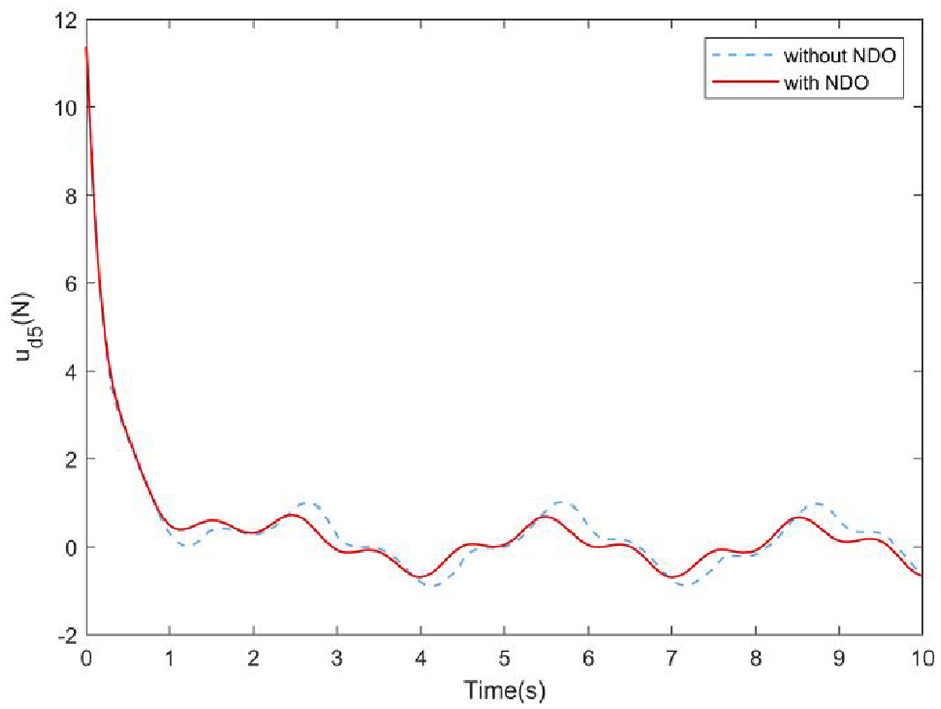
Comparison of control input response curves with or without disturbance observer.
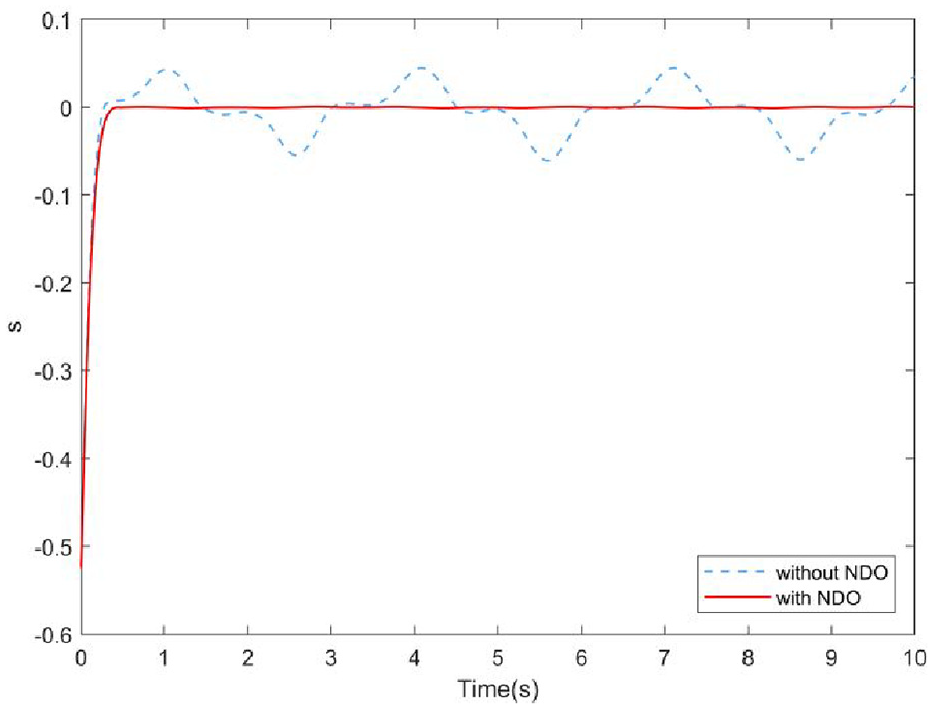
Comparison of sliding mode s response curves with or without disturbance observer: (a) (without NDO), and (b) (with NDO).
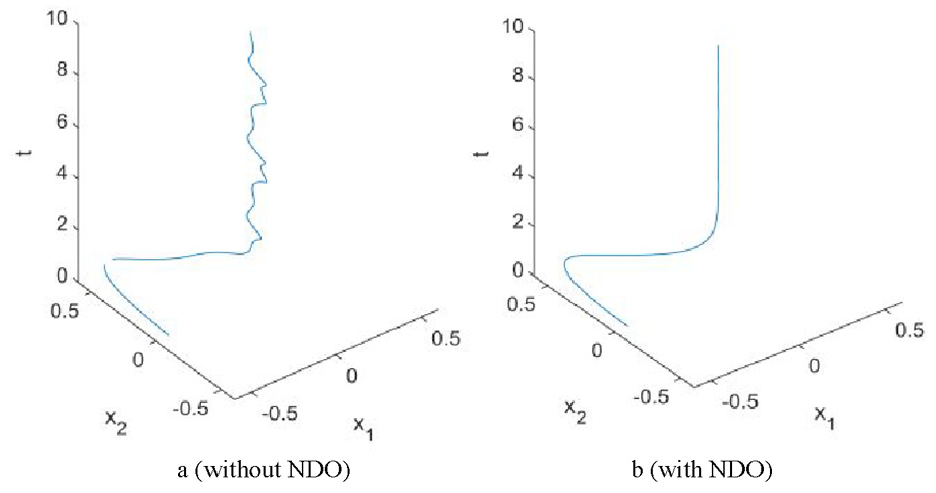
Three-dimensional curve of system phase trajectory.
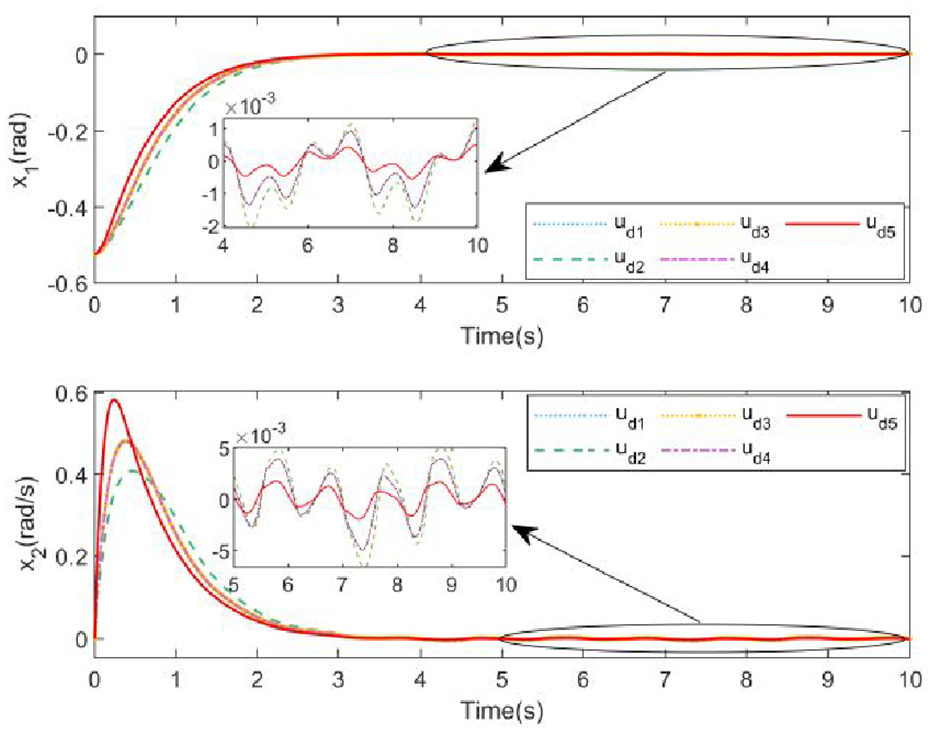
Pendulum angle and angular velocity response curves of each reaching law method with NDO.
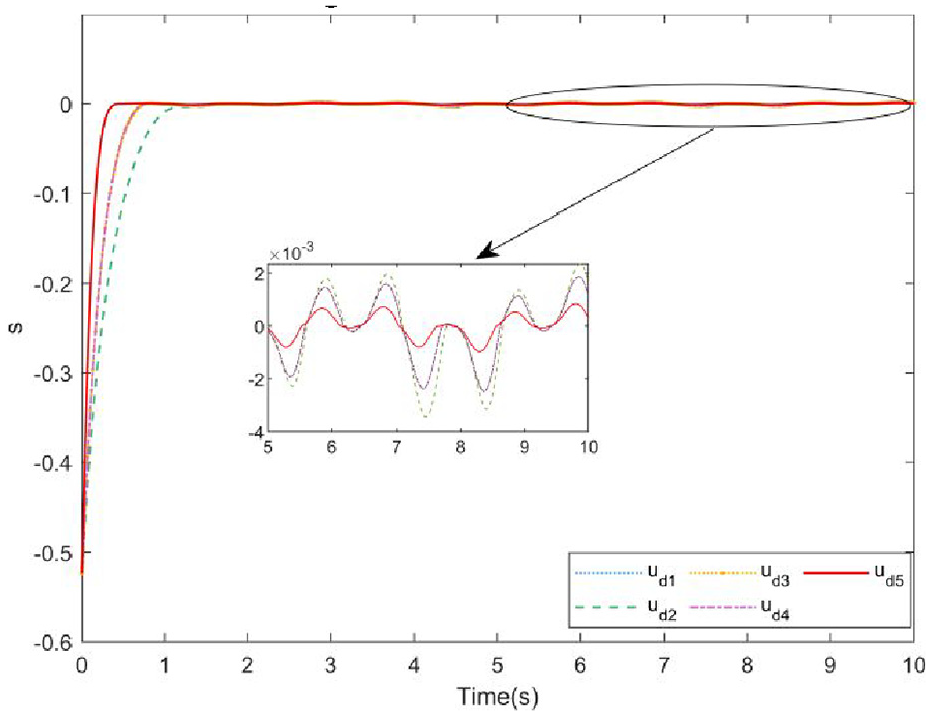
Sliding mode s response curve of each reaching law method with NDO.
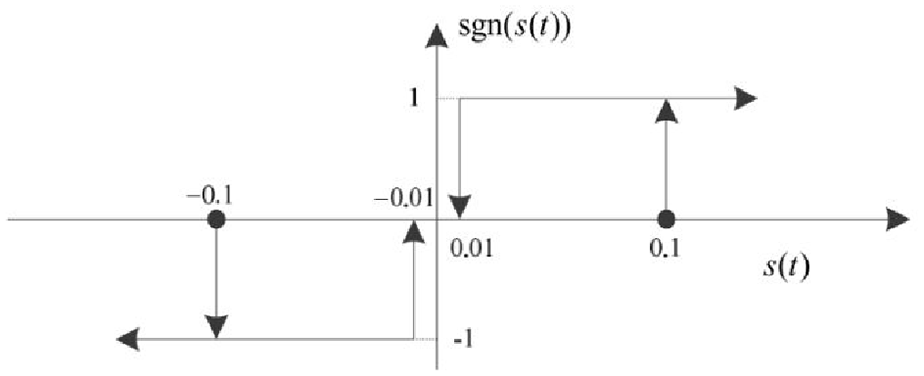
HC method for the sign function.
It can be seen from Figures 12 to 15 that, without the NDO, the system state
In sliding mode control, the presence of a sign function
The sign function designed by the HC method is applied to the control of the inverted pendulum system of the cart, and the proposed reaching law method is adopted. In the case of
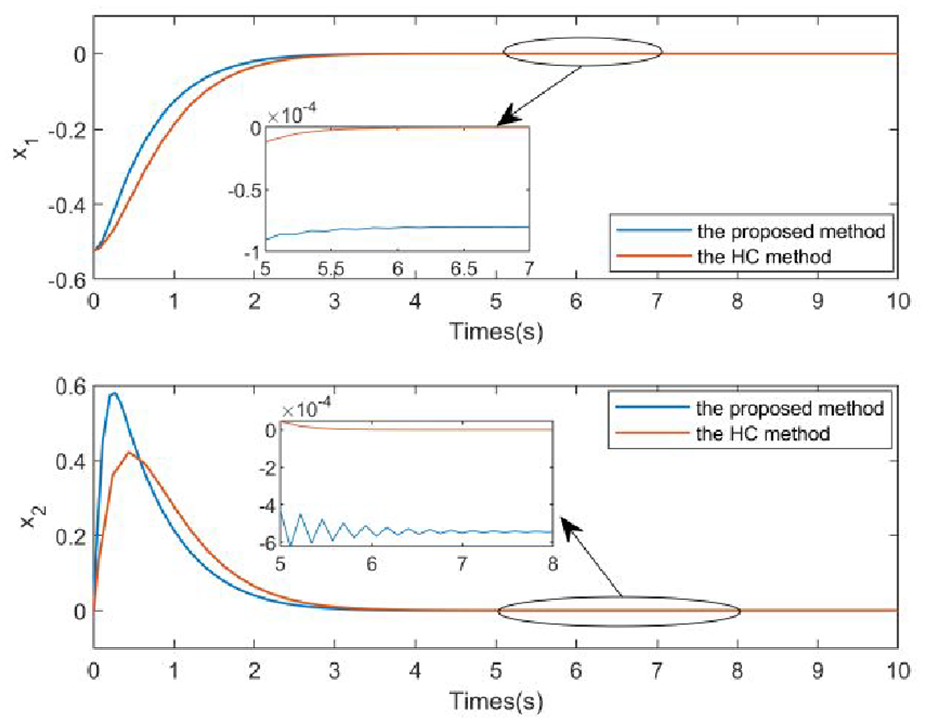
Comparison of HC method and
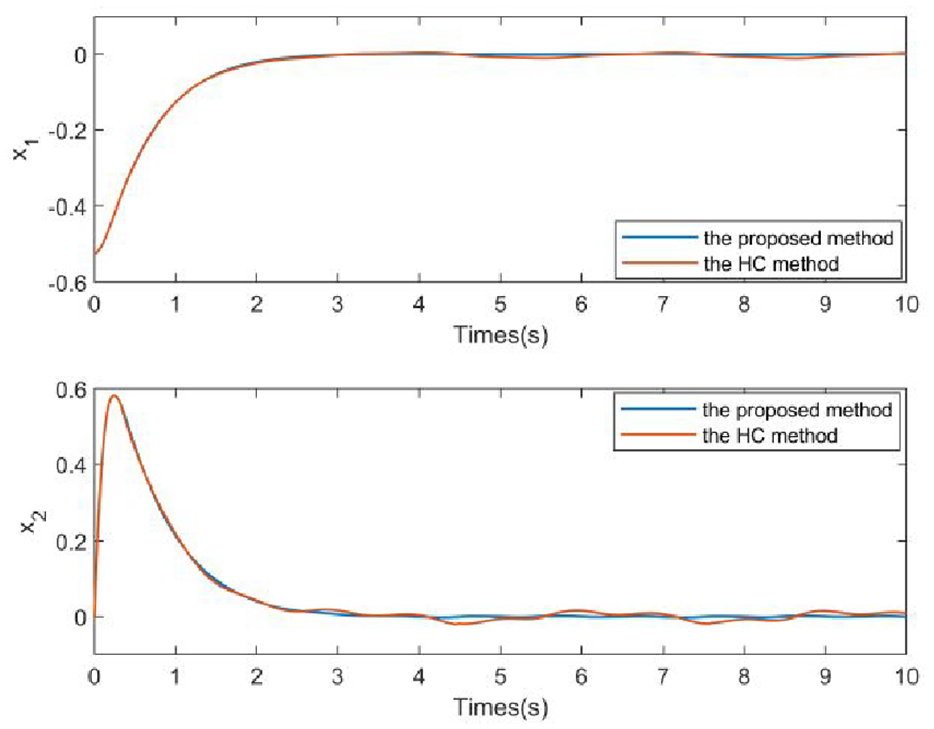
Comparison of HC method and
It can be seen from Figures 19 and 20, in the absence of interference, the HC method can effectively reduce system chattering and steady-state error is smaller, but weakens the convergence speed. In the presence of interference, under the action of NDO, using the HC method will cause excessive system steady-state errors, which will seriously affect the system control accuracy.
Conclusion
This paper proposes a design scheme of piecewise fast multi-power reaching law, a nonlinear function is designed to divide the reaching law into two stages and make the exponential parameters adjust according to different stages. The proposed method combines the advantages of FPRL, DPRL, and VPRL. It has a fast approach rate whether it is remote form or close to the sliding mode. The theoretical analysis shows that the new reaching law has the characteristic of fixed-time convergence and has a maximum convergence time independent of the initial value of the sliding mode state. When there is parameter uncertainty and external interference, the sliding mode variable
Supplemental Material
About_repetition_rate – Supplemental material for Piecewise fast multi-power reaching law: Basis for sliding mode control algorithm
Supplemental material, About_repetition_rate for Piecewise fast multi-power reaching law: Basis for sliding mode control algorithm by Guang-Yu Yang and Si-Yi Chen in Measurement and Control
Supplemental Material
Piecewise_Fast_Multi-Power_Reaching_Law_Basis_for_Sliding_Mode_Control_AlgorithmMarked_version – Supplemental material for Piecewise fast multi-power reaching law: Basis for sliding mode control algorithm
Supplemental material, Piecewise_Fast_Multi-Power_Reaching_Law_Basis_for_Sliding_Mode_Control_AlgorithmMarked_version for Piecewise fast multi-power reaching law: Basis for sliding mode control algorithm by Guang-Yu Yang and Si-Yi Chen in Measurement and Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.