
Abstract
The bridge crane system is widely used in the industrial production for transporting large loads. Its anti-sway positioning control is quite crucial for enhancing handling efficiency and safety, but it is also difficult due to underactuated dynamics and various disturbances. In this paper, an anti-sway positioning control algorithm for unmanned crane is proposed based on the load generalized position tracking control algorithm (GPTC), which combines with a disturbance observer to effectively reject the lumped disturbances. The test results show that the proposed method can effectively achieve anti-sway and positioning with prominent disturbance suppression improvements.
Introduction
In the past few decades, researchers have been making a lot of efforts to explore effective control strategies for underactuated mechanical systems. Underactuated bridge cranes are of great importance mechanical equipment, and are widely used for heavy material transportation in many industrial sites (such as ports, factories, workshops, etc.).1–4 They have many advantages, including high transportation efficiency, low energy consumption, and simple mechanical structure. However, the bridge crane systems have only one control input and two degrees of freedom. The underactuated feature greatly increases the system control complexity and it is quite challenging. The key control goal is to drive the trolley from the initial position to the target position quickly and accurately, while the payload swing must be effectively attenuated. Due to the wide application of bridge crane systems, the anti-sway positioning control and interference suppression has captured a lot of well-deserved attentions from the industrial electronics and control community.
Many researchers have done a lot of important work to control underactuated crane systems, which can be roughly divided into two categories: trajectory planning method and feedback control methods (closed loop). 5 In the former methods, the input shaping technique is widely employed.6−10 In Maghsoudi et al., 7 an improved input shaping method based on particle swarm optimization is proposed for the 3D crane system, and the payload swing is greatly reduced in the control process. In Wu and Xia, 8 an energy-optimal trajectory planning method is designed for safety and energy saving. Zhang 9 considered some constraints, including available speed, the allowable swing amplitude and acceleration, and proposed a minimum time trajectory planning method based on the quasi-convex optimization. Sun et al. 10 designs a motion planning method for the double pendulum crane system. Compared with the trajectory planning methods, closed-loop feedback control methods exhibit better performance in terms of external disturbances and parameter uncertainties.11−30 In Sun et al., 12 the output feedback control method is designed assuming that the speed signals are not obtained. Ramli et al. 13 assumes viscous damping and proposes a composite control scheme for bridge cranes with lifting/lowering payloads. In Zhang et al.,15−23 adaptive and sliding mode control methods are proposed to tackle external disturbances or system uncertainties. What is more, several other efficient control methods have also been adopted, including model predictive control, 24 optimal control,25−28 intelligent control,29,30 and so on.
Currently, the anti-sway positioning control of crane system remains an open topic. For one thing, several kinds of existing control methods rely on the precise model of the system and they are sensitive to internal and external disturbances, such as unmodeled dynamics, friction variations, rope length errors, and so on. For another thing, several robust control methods, such as H-infinity control, have been presented to deal with the adverse effects caused by uncertain disturbances. However, their disturbance suppression control is through feedback control and the robustness is obtained at the expense of their nominal control performance. 31
Inspired by the development of feedforward compensation control methods,32−40 a generalized position tracking control method integrated with disturbance observer is proposed in this work to achieve high-performance anti-sway positioning control with significant disturbance rejection improvements. Firstly, the nonlinear crane dynamic equations are linearized near the equilibrium point. Then, an anti-sway positioning control algorithm combing the load generalized position tracking with disturbance observer is put forward. The disturbance observer is utilized to estimate the disturbances and uncertainties to conduct feedforward compensation. The robust stability criterion of the closed-loop system is given. Finally, disturbance suppression performance of the proposed method is demonstrated.
Problem formulation
The bridge crane is a complex underactuated system,41−43 in which the number of independent control variables is less than the number of system freedom degrees. In this system, the weight block (payload) is hung on the overhead crane trolley to make an approximate single pendulum motion through the wire rope. 13 The schematic diagram of the crane trolley is shown in Figure 1. To facilitate system analysis, the following reasonable assumptions are made: firstly, only the movement of bridge driving and lifting heavy objects is considered. Secondly, the length of wire rope remains unchanged when the bridge is traveling. Finally, lifting heavy objects only moves in a plane and is always in a horizontal state.
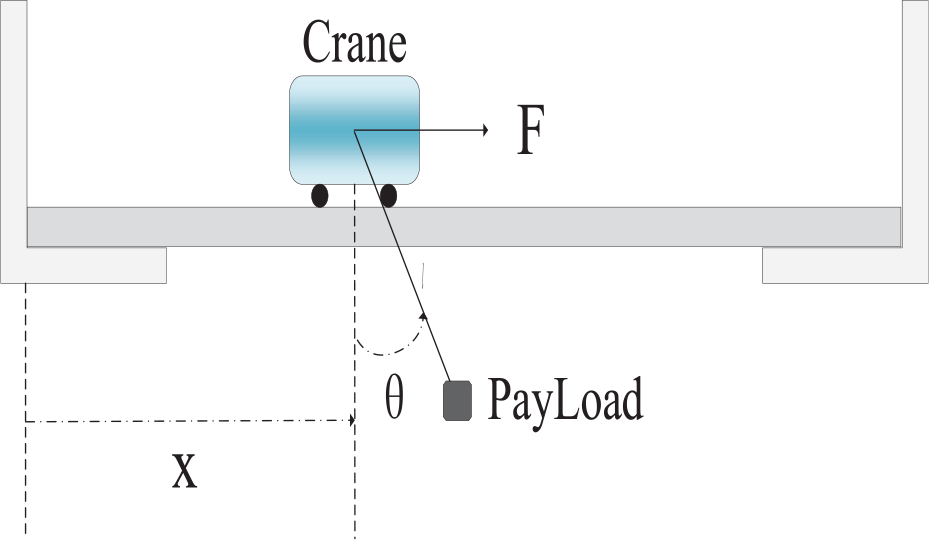
Schematic diagram of the bridge crane.
In this figure, F is the resultant force, consisting of the actuating force and bridge friction. The bridge crane with mass

where
Crane system (1) can be expressed into the matrix form:

where


The expressions of other variable matrices in equation (2) are as follows:



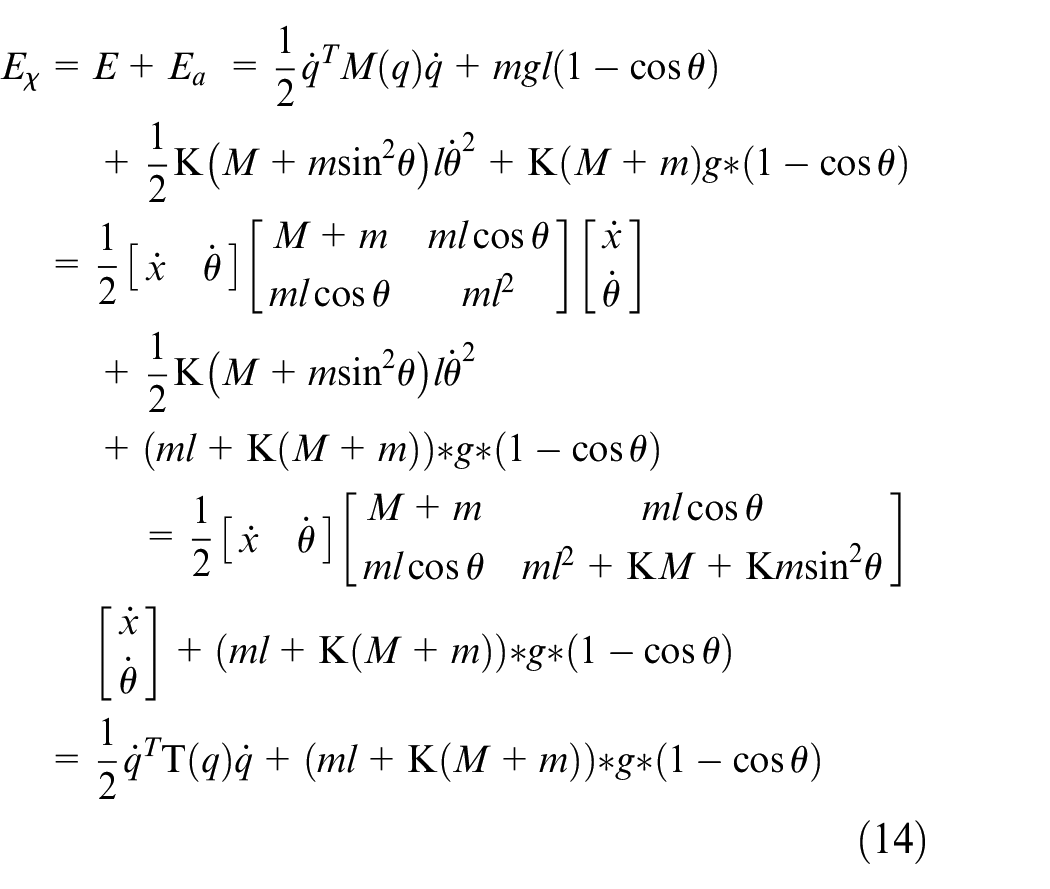
It is known that the energy of the bridge crane system contains the kinetic and potential energies 12

In this system, achieving anti-swing and positioning means that
Control design
Load generalized position tracking controller
By substituting equation (1) into the time derivative of formula

In equation (9), the crane system takes

where


It can be seen from equation (11) that the new energy storage function
According to equations (9) and (11),

where
Substituting
In order to ensure that
It is easy to prove that

where the parameter

The time derivative of
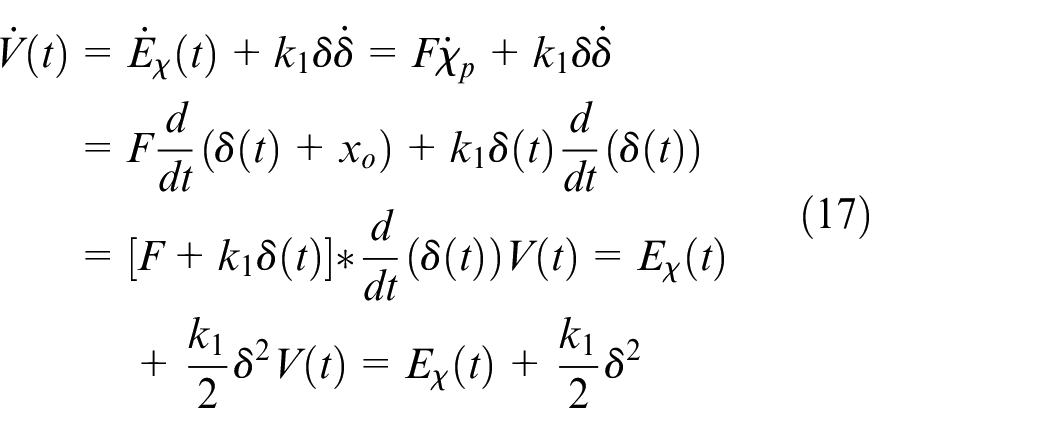
Based on equation (16), the controller is constructed as follows:


According to Lyapunov’s stability theorem, the closed-loop system is Lyapunov stable.
43
Moreover, by LaSalle’s invariance principle,43,44 it can be deduced that the generalized positioning error
Design of disturbance observer
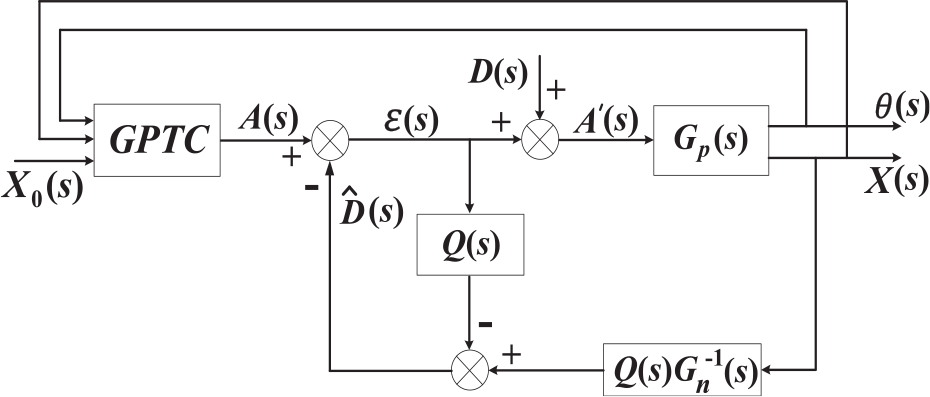
The payload generalized position tracking control algorithm (GPTC) can realize the anti-sway and positioning of the system, however, the disturbance suppression performance is not satisfactory. Here, a disturbance observer is added to enhance the performance of the GPTC feedback controller, which is shown in Figure 2.
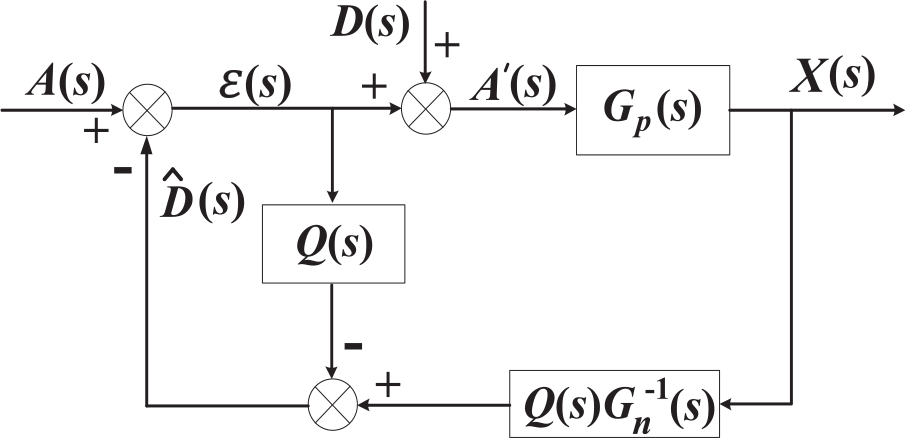
Principle block diagram of disturbance observer.
In this figure,

where

From Figure 2,
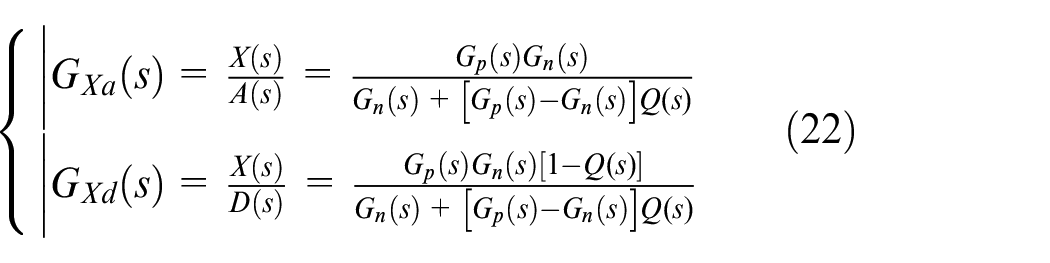
In the bridge crane system, the frequencies of external disturbances are mainly concentrated in the low frequency band. If the frequency band of the low-pass filter
(1) when

(2) when

From equations (23) and (24), the output expression with disturbance observer does not contain the disturbance term
In summary, the disturbance observer can realize the function of suppressing disturbances without affecting the control performance of the system. This feature can be utilized to design the disturbance observer and the anti-sway feedback controller separately.
Considering that the time-varying parameters of the actual model of bridge crane will affect the stability of the disturbance observation error system, it is necessary to determine the conditions that can ensure the stability of the disturbance observer.

where

where

From equation (26), the sufficient condition that the disturbance observer is stable can be rewritten as:

Therefore, the key point of the disturbance observer is to design the low-pass filter

where

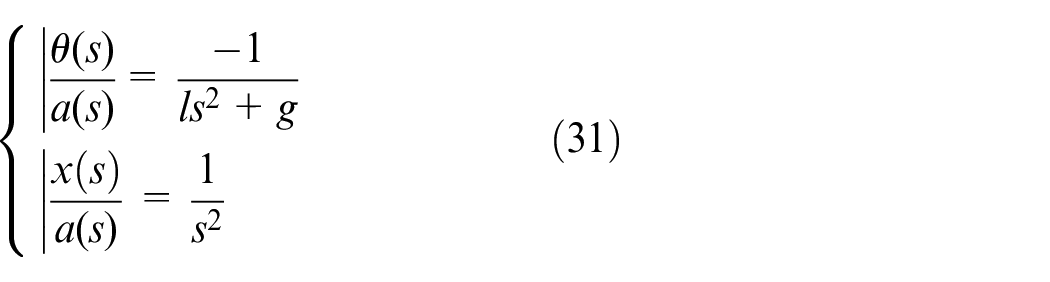
The system transfer function can be obtained from the linearized model of the system (1):
In the bridge crane system, the disturbance estimate generated from the disturbance observer is added to the position input and the system nominal model is taken as
Control block diagram of the system with GPTC-DOB.
Performance comparisons
In this part, the disturbance suppression responses of the proposed method for the anti-sway and positioning controls are studied under the nominal case and the model mismatch case. Here, the target transport distance of the crane is set to 3.5 m, and the length of the rope is set as 3.5 m.
Nominal Case without disturbances
In this case,
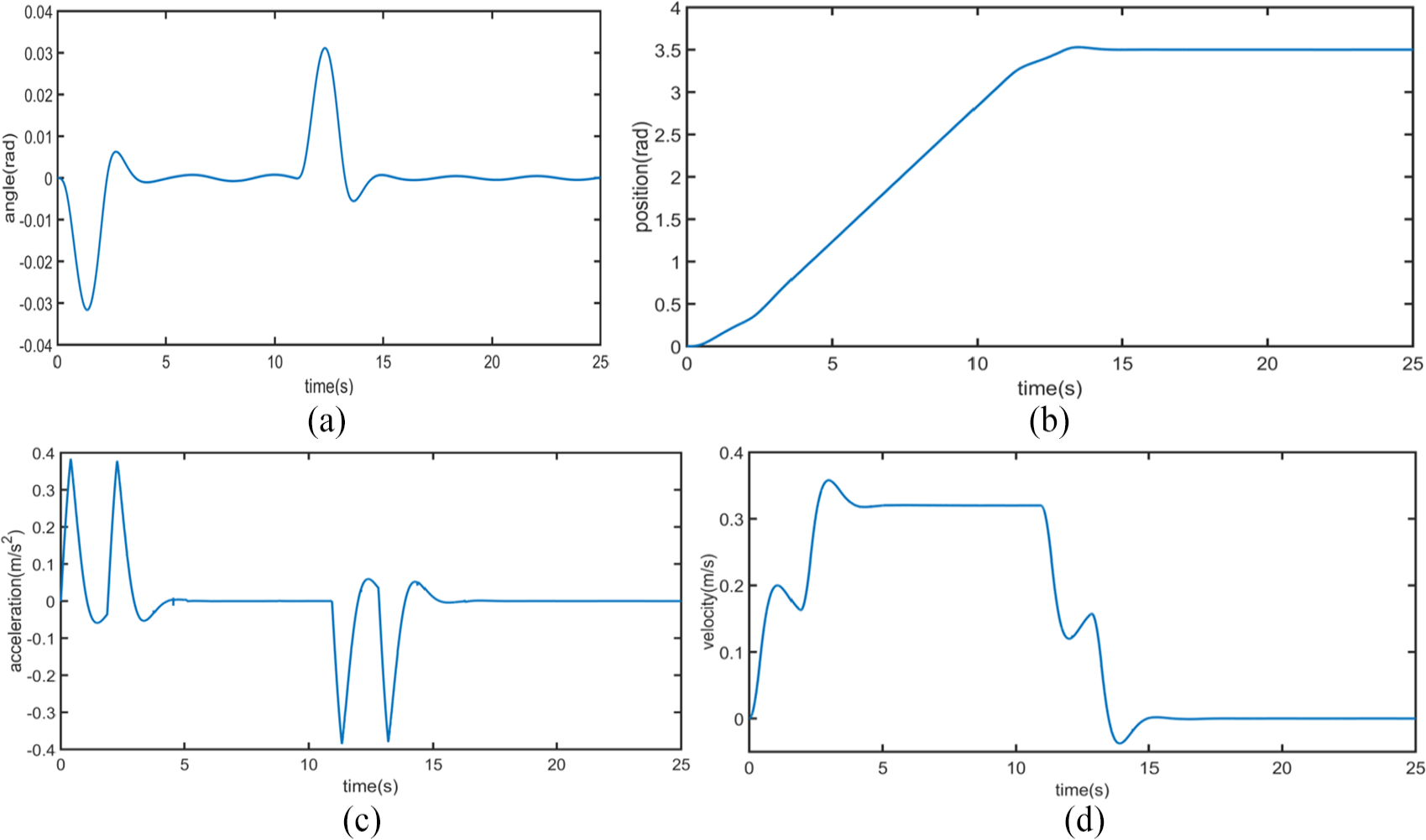
Variable response curves with the GPTC-DOB schemes without disturbances in the nominal case.
Nominal case with disturbances
Next, the disturbance suppression performance of the proposed GPTC-DOB method and the baseline GPTC are verified. In the crane control system, the friction force fluctuates continuously when the crane slides on the track. Therefore, both the step disturbance response and sinusoidal disturbance response are evaluated and presented.
Step disturbances
It is assumed that step disturbances occur from the t = 5 s to t = 8 s, such as the friction coefficient changes on one part of track. Figure 5(a) and (b) illustrate the angle curves and position curves under the step disturbances. It is clear that smaller swing angle amplitude, especially at the target location, can be obtained under the proposed GPTC-DOB method than the baseline GPTC method. Figure 5(c) and (d) show the curve of the acceleration and velocity. The external disturbances added and the estimations are presented in Figure 6. It can be seen that the proposed method can effectively estimate the external disturbances and achieve small estimation error.
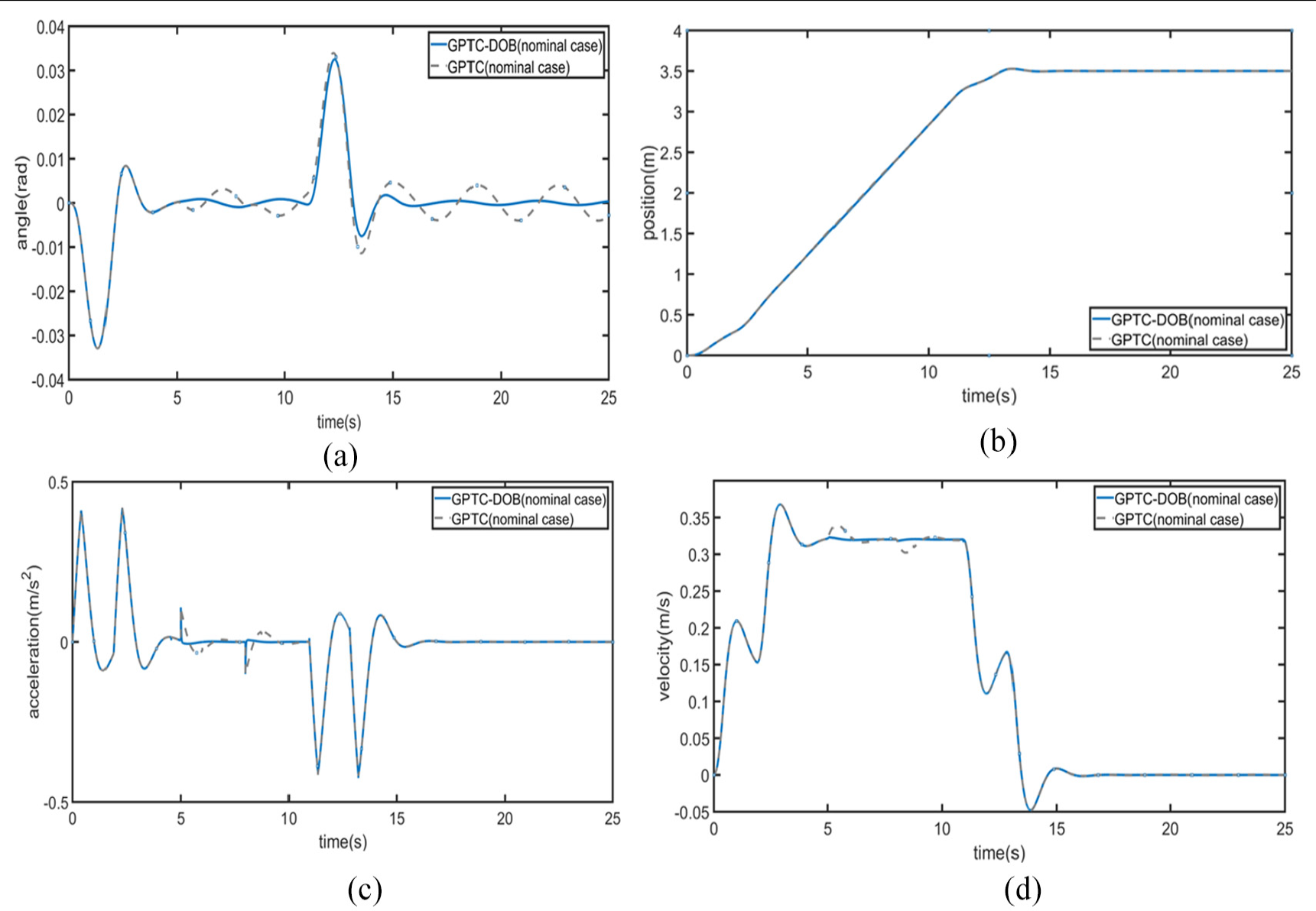
Variable response curves with the GPTC-DOB and GPTC schemes under the step disturbances in the nominal case.
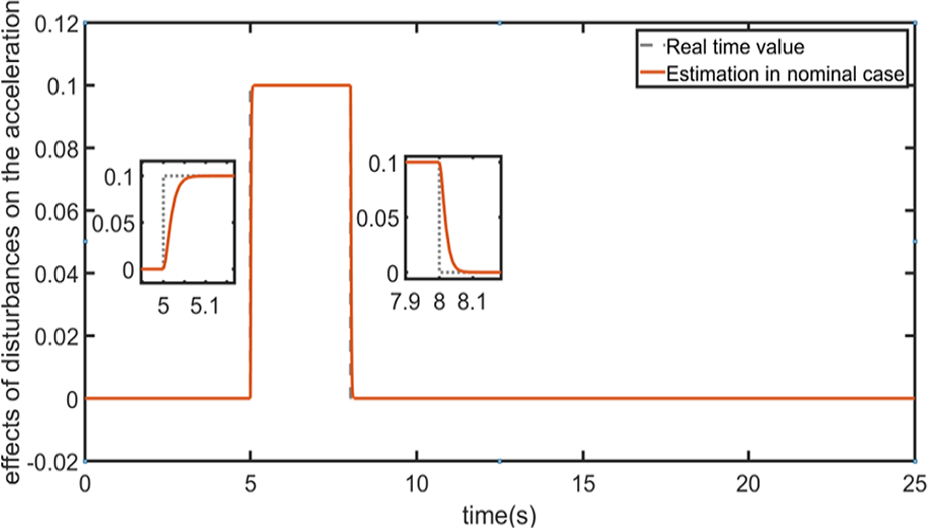
Step disturbances and their estimations in the nominal case.
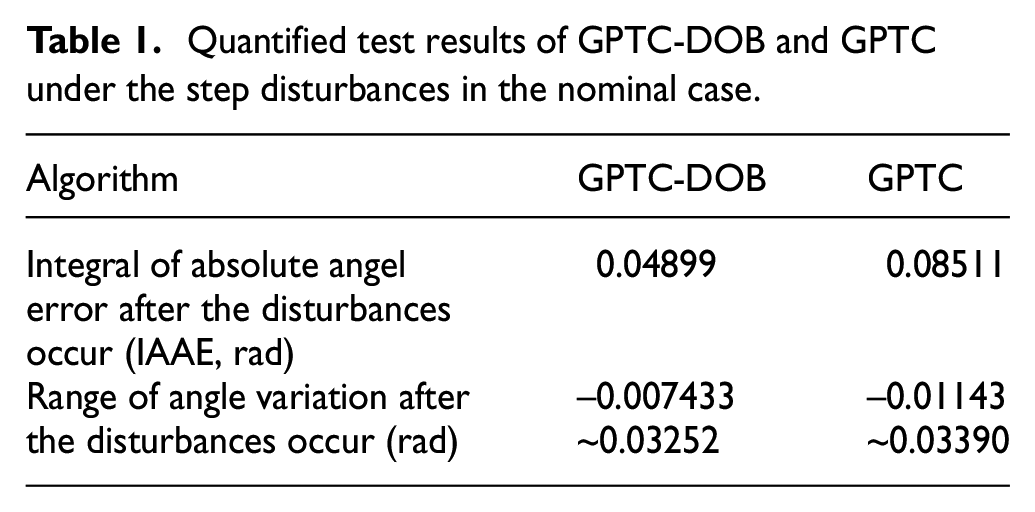
The quantified test results are shown in Table 1. The performance indices include the range of angle variation and the integral of absolute angel error (IAAE). After the step disturbances are added at t = 5 s, compared with that without DOB (GPTC method), the range of angle variation is reduced by 11.86% and the integral of absolute angel error (IAAE) can be largely decreased (nearly 50%) under the proposed GPTC-DOB method (τ = 0.001). From Figure 5(a) and Table 1, the proposed GPTC-DOB method has better disturbance rejection performance.
Quantified test results of GPTC-DOB and GPTC under the step disturbances in the nominal case.
Sinusoidal external disturbances
In this case, sinusoidal external disturbances (

Variable response curves with the GPTC-DOB and GPTC schemes under the sinusoidal disturbances in the nominal case.
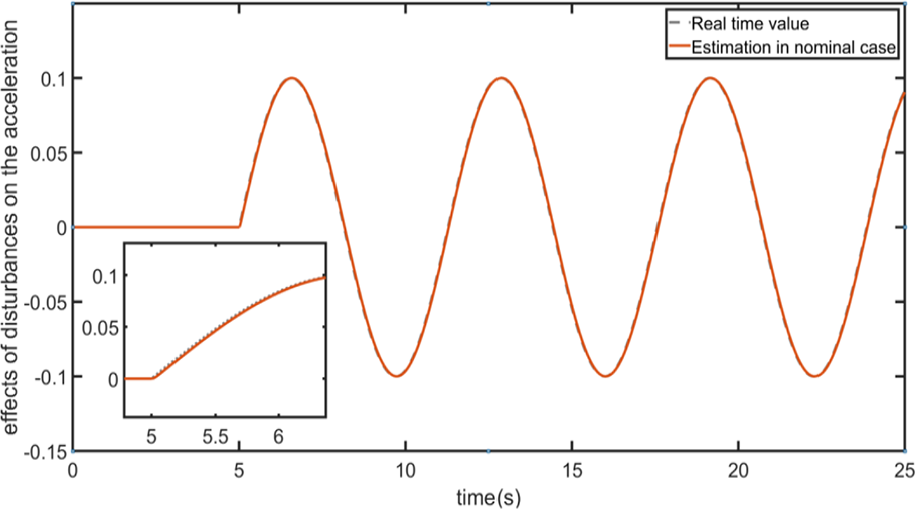
Sinusoidal disturbances and their estimations in the nominal case.
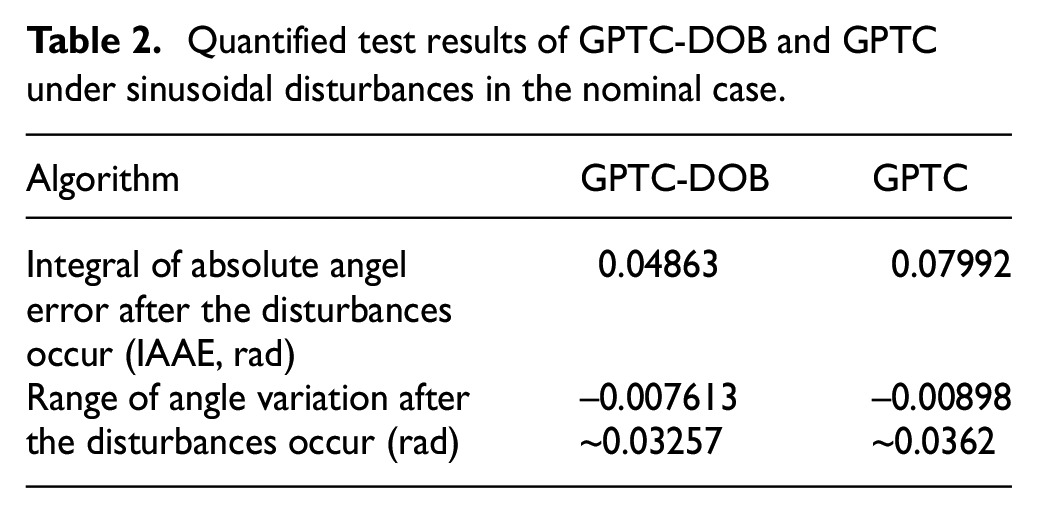
Quantified test results of GPTC-DOB and GPTC under sinusoidal disturbances in the nominal case.
Model mismatch case with external disturbances
In the anti-sway positioning control system of bridge crane, apart from external disturbances, internal model mismatch is also the key factor affecting control performance. This section will demonstrate lumped disturbance suppression performance.
In general, the length of wire rope has measurement error. Assume the angle channel model is as follows:

Comparing (32) with (31), model mismatch exists.
Step disturbances
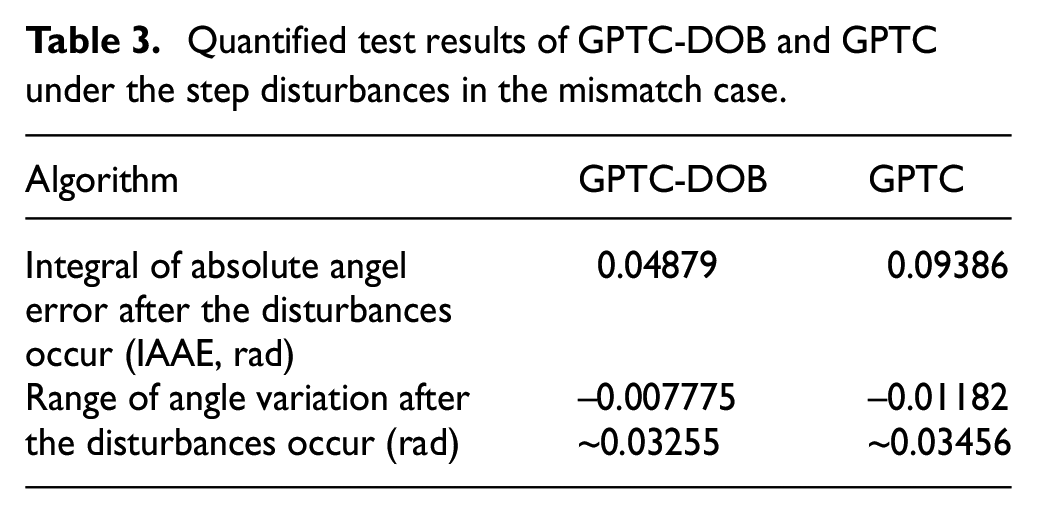
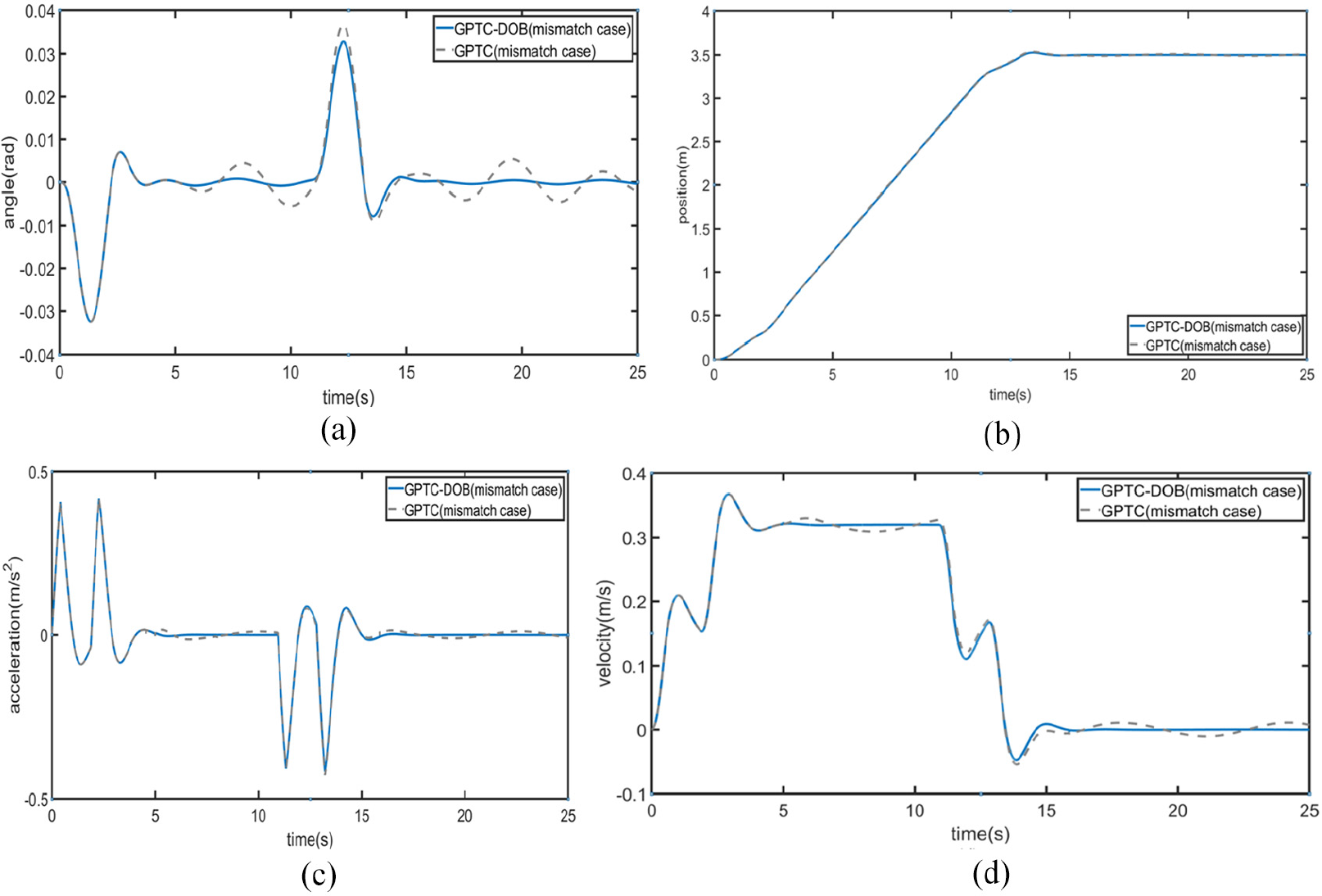
The step external disturbances are also added from the t = 5 s to t = 8 s. Figure 9(a) and (b) present the angle curves and position curves of the crane system under the two methods. The curves of acceleration and velocity are shown in Figure 9(c) and (d). Table 3 gives the quantified test results. It can be obtained from Figure 9(a) and Table 3 that much smaller angel fluctuation amplitude and IAAE value can be achieved by the proposed GPTC-DOB method than baseline GPTC method even in the model mismatch case. The range of angle variation is reduced by 13.06% and IAAE value is largely decreased (nearly 50%).
Variable response curves with the GPTC-DOB and GPTC under the step disturbances in the model mismatch case.
Quantified test results of GPTC-DOB and GPTC under the step disturbances in the mismatch case.
Sinusoidal external disturbances
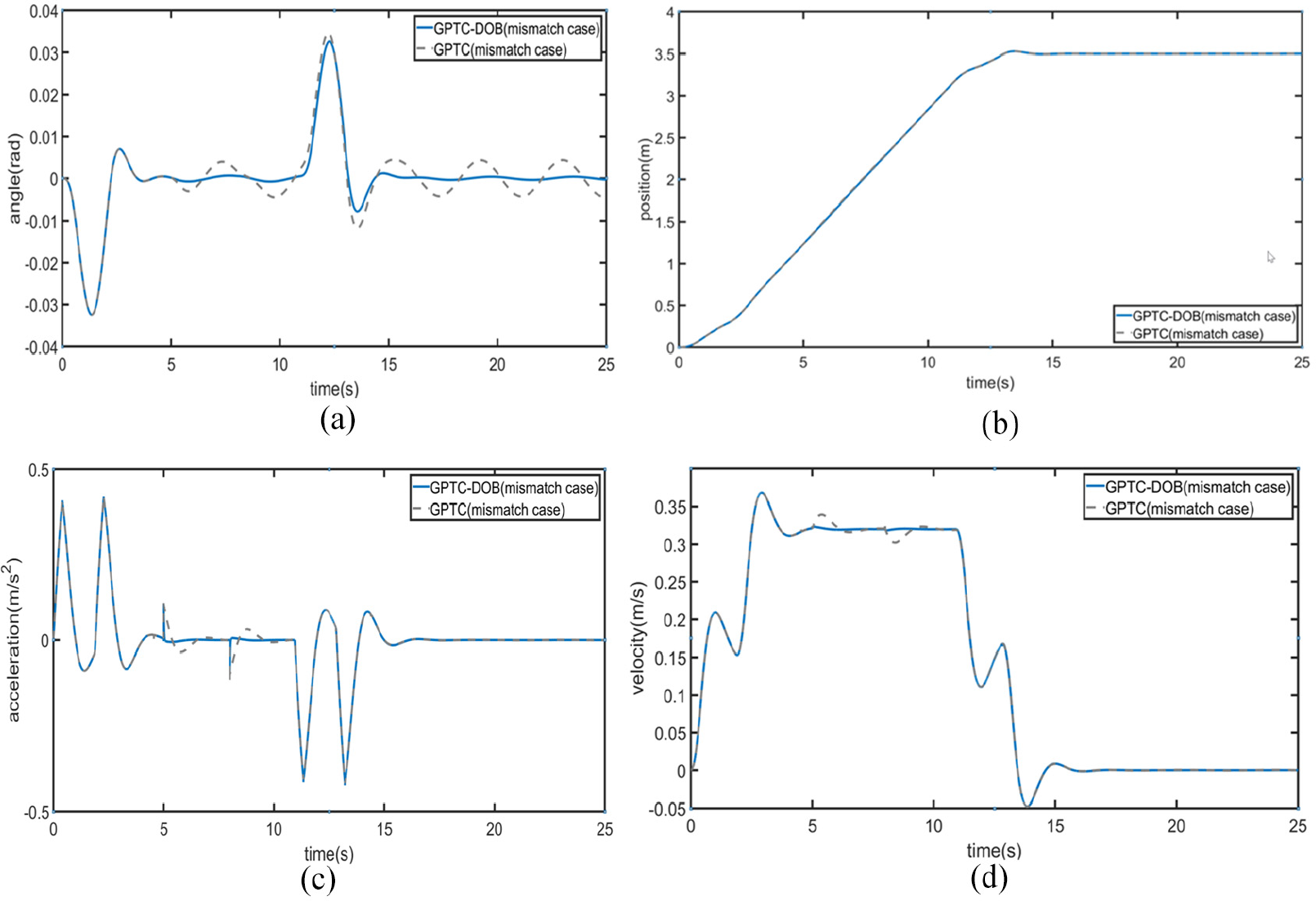
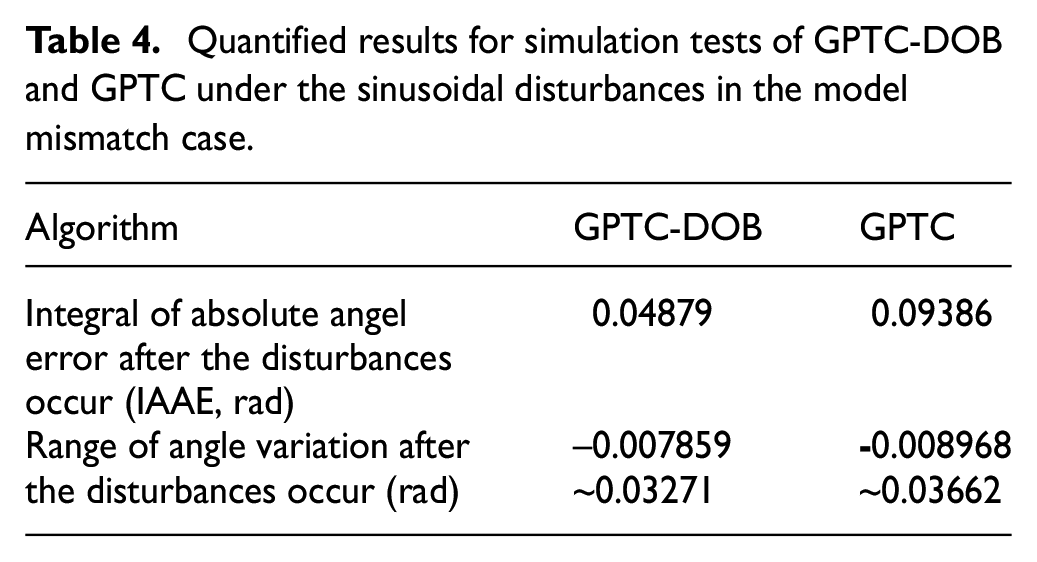
In this case, apart from model mismatch, sinusoidal external disturbances are added from t = 5 s. Figure 10(a) and (b) present the angle curves and position curves under the two methods. The curves of acceleration and velocity are shown in Figure 10(c) and (d). The quantified test results are given in Table 4. It is clear that the proposed GPTC-DOB method obtains much smaller angel fluctuation amplitude and IAAE value than GPTC method, which means that it exhibits better performance in rejecting the lumped disturbances.
Variable response curves with the GPTC-DOB and GPTC schemes under the sinusoidal disturbances in the model mismatch case.
Quantified results for simulation tests of GPTC-DOB and GPTC under the sinusoidal disturbances in the model mismatch case.
Conclusion
In the bridge crane system, anti-sway and positioning control is of significant importance for enhancing transport efficiency and safety. However, various disturbances, including external disturbances and internal model mismatches, degrade the control performance. In this paper, the load-based generalized position tracking controller combined with the disturbance observer is proposed, which can estimate disturbances and give feedforward compensation. Test results show that the proposed method obtains much smaller angel fluctuation amplitude and IAAE value, and indicate significant disturbance suppression improvements.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Key R&D Program of China (No. 2018YFC1506900), Zhishan Youth Scholar Program of SEU, the Fundamental Research Funds for the Central Universities under Grant 2242020R40032, the Key R&D Program of Jiangsu Province (No. BE2017076, BE2019052), the Key R&D industrialization Program of Suzhou (No. SGC201733, SGC201854).