
Abstract
In this paper, we proposed an adaptive ACS algorithm by introducing an adaptive pheromone volatility coefficient and the algorithm diversity dynamically varying in different iterations of the algorithm. It incorporates a shunting hierarchical hybrid neural network application algorithm (Shunting HHNN Application Algorithm, SHAA) to overcome the drawbacks of global optimization capabilities of ant colony system (ACS) in solving robot path and easily being trapped into the local optimal solution. Considering the influence of the activation value size on the selection of the grid in the SHAA neural network algorithm, the distance factor and the activation value are combined to improve the heuristic function. This will not only ensure the convergence speed, but also avoid the premature stagnation and being trapped into a local optimal path. Simulation results show that the algorithm discussed in this paper outperforms better in both the global optimization ability and the robustness.
Introduction
As the world enters a new era of industry, robots play an irreplaceable role in various industries. In addition, the robot path planning is a significant part of modern robotics. Its main purpose is to find a safe and collision-free optimal or sub-optimal path from the starting position to the target position in the model space based on certain performance indicators (shortest walking path, shortest planning time, minimum energy consumption, etc.) in working environments with obstacles.
In recent years, scholars at home and abroad have conducted extensive and in-depth research on solving the robot path planning, 1 and have proposed lots of fruitful path planning methods. In Lamini et al. 2 the improved genetic algorithm (GA) was used for the path planning, which had the advantages of strong robustness and implicit parallelism, but it was prone to a premature convergence; Hassani et al. 3 has used the grid method to model the environment and used A* algorithm to find the optimal path. This method was a heuristic search algorithm. However, in order to store the open set and close set in complex environment, this method takes up a lot of memories and runs slowly; In Sun, 4 the artificial potential field method was used for path planning of the robot. This method is very simple and fast, but it is easy to fall into a local minimum and the target is not reachable; In Tang et al. 5 particle swarm optimization (PSO) was used to simulate the foraging behaviors of birds. This method has the advantages of less parameter adjustment and fast search speed, but it is prone to the premature convergence in the late search period. These methods have achieved good results in solving robot path planning problems, but they still have certain defects when facing with complex environments.
The ant colony algorithm is a heuristic search algorithm proposed to simulate the foraging behavior of ant colonies in nature. It has the characteristics of positive feedback, parallel computing, and good robustness. Therefore, a large number of scholars apply the ant colony algorithm to the robot path planning and obtain better results. What’s more, the ant colony algorithm has a fast convergence speed, but it also has problems such as stagnant search and easily fall into the local optimum. Aiming at these problems, The Bu et al. 6 points out that the maximum minimum ant colony algorithm uses the minimum pheromone concentration to increase the possibility of exploration on the better solution, while the maximum pheromone concentration ensures the heuristic experience for the ant colony and effectively uses the optimal solution, but it is easy to lead to premature stagnation of the search. Zhang and Sun 7 proposes an improved ant colony optimization algorithm. Construct a unequal allocation of initial pheromones to avoid blind searches in earlier plans. Pseudo-random state transition rules are used to select the path, and the state transition probability is calculated according to the current optimal solution and the number of iterations to improve the algorithm’s convergence speed. Due to the construction of the unequal allocation pheromone, although this method improves the convergence speed of the algorithm, it sacrifices the global optimization ability of the algorithm, to a certain extent, and an error occurs when finding the optimal solution. Luo et al. 8 introduces direction coefficients, safety distance judgment strategies, and improved pheromone update mechanisms to improve the operating efficiency and the convergence speed, of the algorithm to avoid being trapped into a deadlock. Due to the introduction of the safety distance, the algorithm is good for avoiding obstacles, but the algorithm will still produce errors when it finds the optimal path, which affects the robustness of the algorithm. In Hsu and Juang, 9 an optimal path planning method based on elite ant colony algorithm is proposed to solve the premature problem of ant colony algorithm. First, the initial pheromone is added to improve the convergence speed of the algorithm. Second, the dual elite ant strategy is used to update the pheromone concentration of the two optimal paths by the mutual constraint to solve the problem of the premature algorithm. However, the introduction of elite strategy is bound to reduce the diversity of the algorithm and affect the global optimization ability of the algorithm to a certain extent.
Therefore, in this paper, we propose an adaptive ant colony system algorithm that incorporates a shunting hierarchical hybrid neural network application algorithm (Shunting HHNN Application Algorithm, SHAA), of the algorithm which dynamically varies the pheromone volatility coefficiently and enhances the global search ability. At the same time, by combining the SHAA neural network algorithm, a new heuristic function is proposed to overcome the drawback of premature stagnation. Simulation experiments show that the improved algorithm shows good performance in both the quality of the solution and the speed of the convergence.
Establishment of environment model by grid method
In this paper, in the study of robot path planning, it is assumed that the environment is two-dimensional static, the height of obstacles is ignored and stationary. Because the grid method is simple and effective, the operation is strong, which greatly reduces the complexity of environment modeling and reduces the calculation of the algorithm. Therefore, this paper uses a grid method for environmental modeling, the map is divided according to a certain step, with black and white grid to represent the environment. The black grid represents the obstruction, the white grid represents the feasible area, the matrix 1 represents the obstacle, and 0 represents the free grid. 10 The environment model is built as shown in Figure 1.
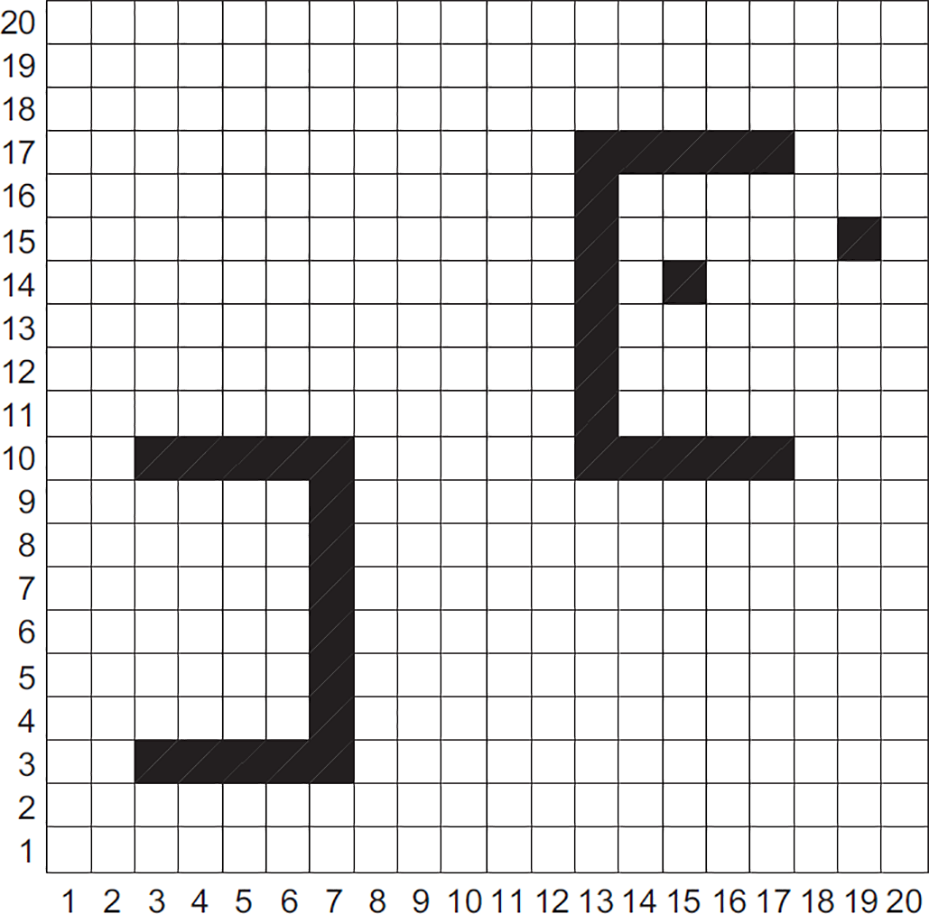
Raster map.
Taking the grid where the robot is located as the center, there are eight direction nodes for the robot to walk. The access of ants to the grid is based on the center point of the grid, as shown in Figure 2.
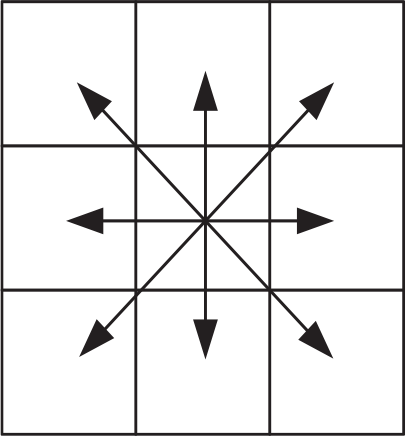
Robot range of motion.
The first grid in the upper left corner of Figure 1 is serial number 1, the right serial number is added one by one, the grid coordinates of serial number 1 are (0.5, 19.5), the grid coordinates of serial number 7 are (6.5, 19.5), and the grid coordinates of the type of prossy 400 are (19.5, 0.5), that is, the lower right-hand grid.
ACS algorithm and improvement
ACS algorithm
The Ant Colony System (ACS) was proposed by Dorigo and Gambardella in 1996 to improve the performance of the Ant System (AS).
11
First, ACS adopts a bolder behavior selection rule, which is controlled by setting parameters
Where,
The ACS algorithm makes global pheromone updates by using equations (3) and (4) in the continuous exploration of the optimal solution.


Where,
Since the global pheromone is updated only in the current optimal path, along with the iteration, Then the residual pheromone of the current optimal path may be much higher than that of other paths, the subsequent ant search path will be trapped in local optimal solution, so local pheromone updating method is put forward in the ACS algorithm, if reduces the current optimal path with other path pheromone gap, the local updated methods in accordance with the type (5).

Where, ∂ is the local pheromone volatility, and
Improved ACS algorithm
In this paper, ACS algorithm is improved from two aspects : (1) the dynamic adaptive pheromone volatility coefficient is proposed to adjust the search ability of the algorithm, so as to change the algorithm diversity in different iteration periods; (2) In order to overcome the problem that ACS algorithm is easily trapped in local optimization, the SHAA neural network algorithm is integrated to construct a new heuristic function to improve the attraction of the target point to the robot and the global optimization ability of the algorithm.
Dynamic adaptive pheromone volatility
In the iteration process of ACS algorithm, parameters directly or indirectly affect the performance of the algorithm, and the value of the pheromone volatility parameter directly affects the convergence speed and the global search ability of the algorithm. When the pheromone volatility factor
According to the above analysis, the fixed value of

Where, the independent variable
Improved heuristic function
When the classical ACS algorithm designs the heuristic function, it only considers the distance between the next node and the current node, and the single influencing factor may lead to the local optimal solution. This paper combines the SHAA neural network algorithm, 16 and the SHAA neural network algorithm chooses the next node’s influence factor is the size of the activation value, combines the activation value with the original heuristic function, and considers multiple factors comprehensively to select the next node. When selecting the next node, not only the size of the distance but also the size of the activation value of the next node is considered to improve the global search ability.
In the SHAA neural network model, the excitation input variable comes from the target and the neuron in the acceptance domains

Where,
The inhibitory input variable only comes from the obstacle and is expressed as (8)


Through
The state equation of SHAA neural network algorithm is given by equation (10).

Substitute
Where,
In SHAA neural network algorithm model, the iterative calculation rules of activation value are shown in equation (12) :

Where,
In this paper, SHAA neural network algorithm is introduced to improve the attraction of the target point to the robot so that the robot can choose the grid with the next maximum activation value and avoid falling into the local optimization. Therefore, the factors that affect the selection of the next grid are not only from the distance, but also from the activation value of the grid. The shorter the distance is, the larger the activation value is, the greater the probability of selecting the next node; otherwise, the lower the selection probability is. Therefore, the construction heuristic function is

To sum up, the adaptive ACS algorithm combined with SHAA neural network algorithm selects the next grid formula as follows:
Where
Algorithm flow of this paper
Initialize the parameters of SHAA neural network, Set the starting point as
The activation value is propagated from the target grid to the neighborhood grid by iteration, and the activation value in the neighborhood of the known activation value grid is calculated;
Initialize the tabu table;
Move the starting point to the tabu table;
Determine whether the ant candidate node is in the tabu table;
Move on to the next ant;
Using the selection rule formula of the algorithm in this paper, each ant chooses the next node according to formula (14).
The next node selects the target point;
Update the tabu table;
Use formula (5) to update local pheromone.
Global pheromone updating was carried out through the pheromone update formula (7).
Experimental results and analysis
In order to verify the effectiveness of the algorithm in this paper, the mentioned grid method above was used to build the environment model. Particle swarm optimization (PSO) algorithm is often used in path planning because of its fast convergence speed, simple parameters and easy implementation. Artificial fish swarm algorithm (AFSA) is a new random search optimization algorithm which appears in recent years. It has the advantages of strong optimization ability and the fast convergence speed, The self-adaptive AFSA algorithm is proposed by scholars, 17 which can dynamically change the field of vision of the fish swarm and make the algorithm more flexible. Therefore, the Improved AFSA and PSO are added to the algorithm comparison experiments. And the simulation results of the algorithm in this paper, the ACS algorithm, PSO, Improved AFSA were compared in the same environment, and the experimental results were analyzed.
Algorithm parameter selection
The parameter analysis and setting before the simulation experiment is the key to determine the performance of ACS algorithm. Because there is no strict theoretical basis for the determination and the selection of parameters, there is no mathematical analysis method to determine the parameters. For the parameters
It can be seen from Table 1 that with the change of information heuristic factor
The relationship between

It can be seen from Table 2 that the expected heuristic factor
The relationship between

It can be seen from Table 3 that on the surface, the more ant colony number
The relationship between

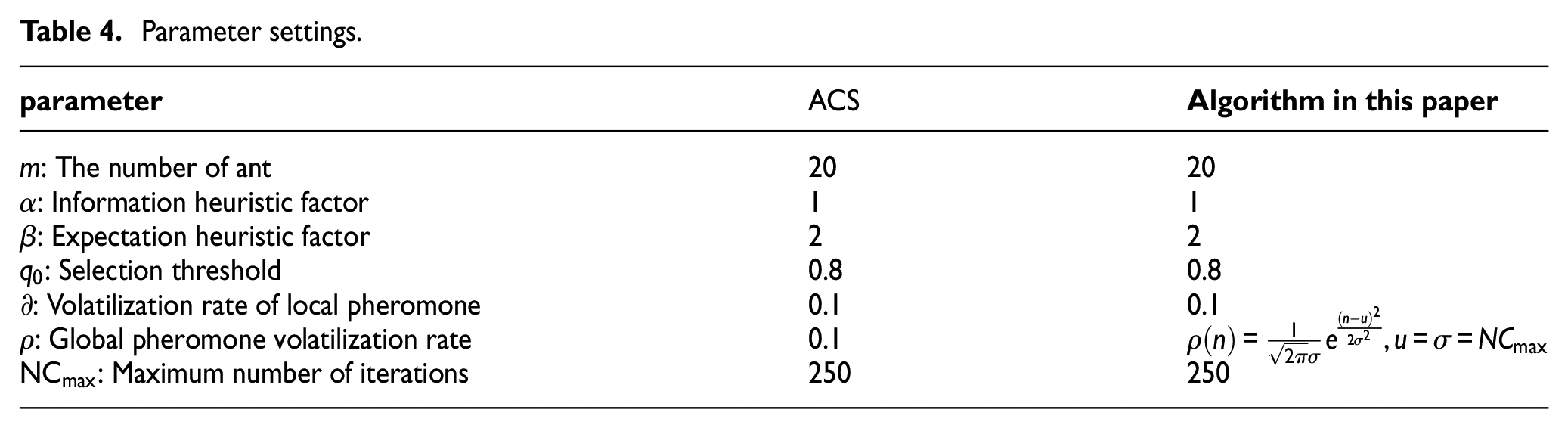
Similarly, other parameters, such as the selection threshold
Parameter settings.
Experiment and analysis
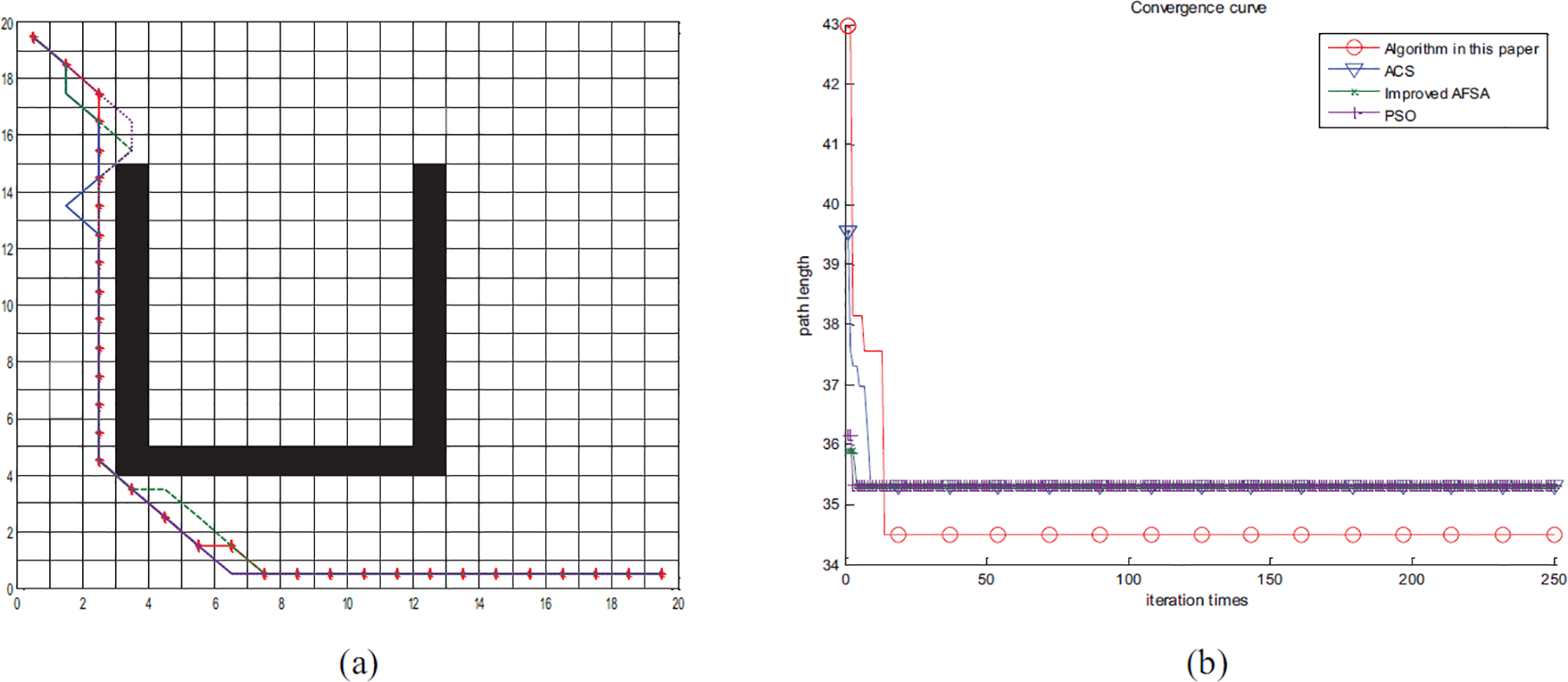
Experiments were carried out under the E-type obstacles, the concave obstacles, the simple obstacle environment and the complex obstacle environment: the red star line represents the algorithm in this paper, and the blue solid line represents the classical ACS algorithm, The green dotted line represents the AFSA algorithm, The purple line represents the PSO algorithm. The path planning results and the convergence curves of the four algorithms under E-type obstacles (Set the starting point
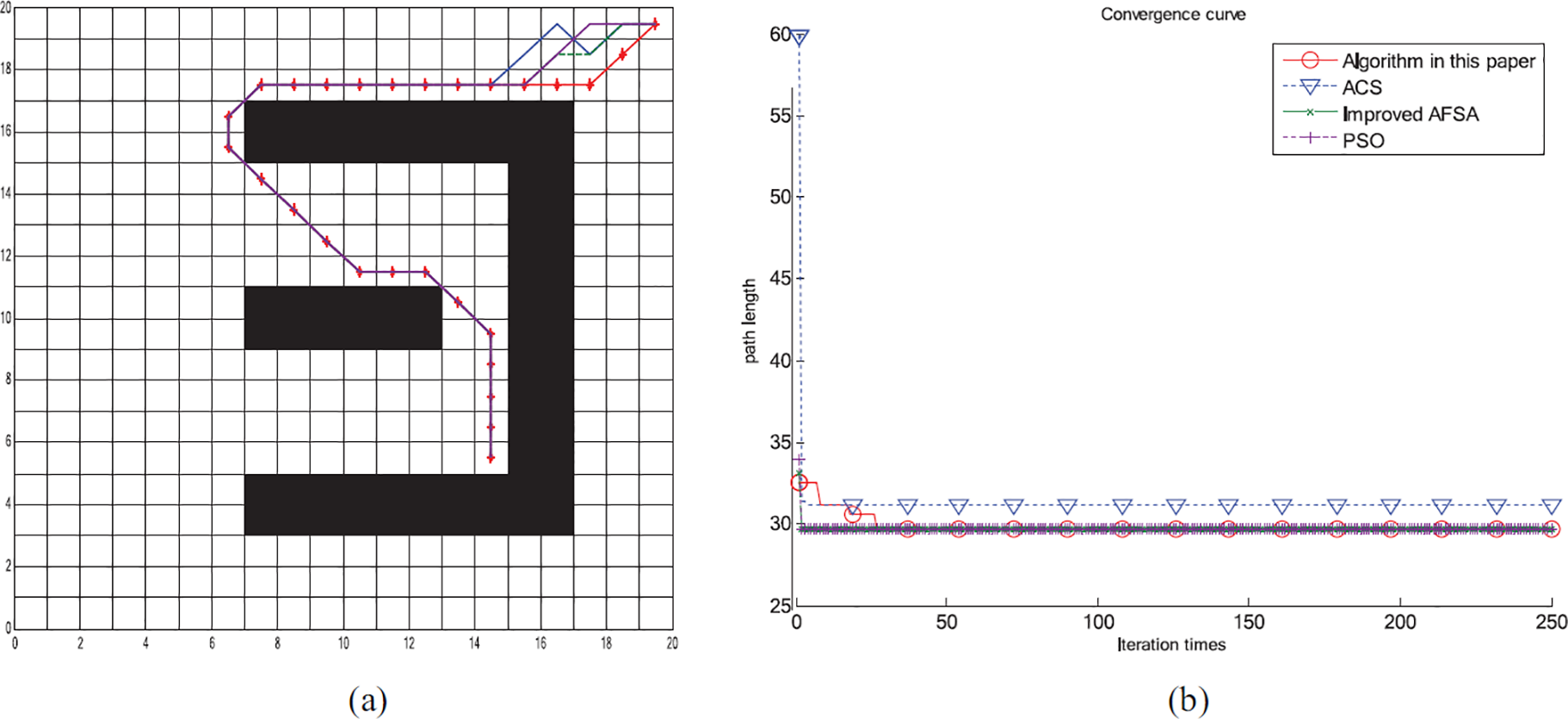
E-type obstacle: (a) path planning map, (b) convergence curve.
Concave barrier grids: (a) path planning diagram, (b) convergence curve.
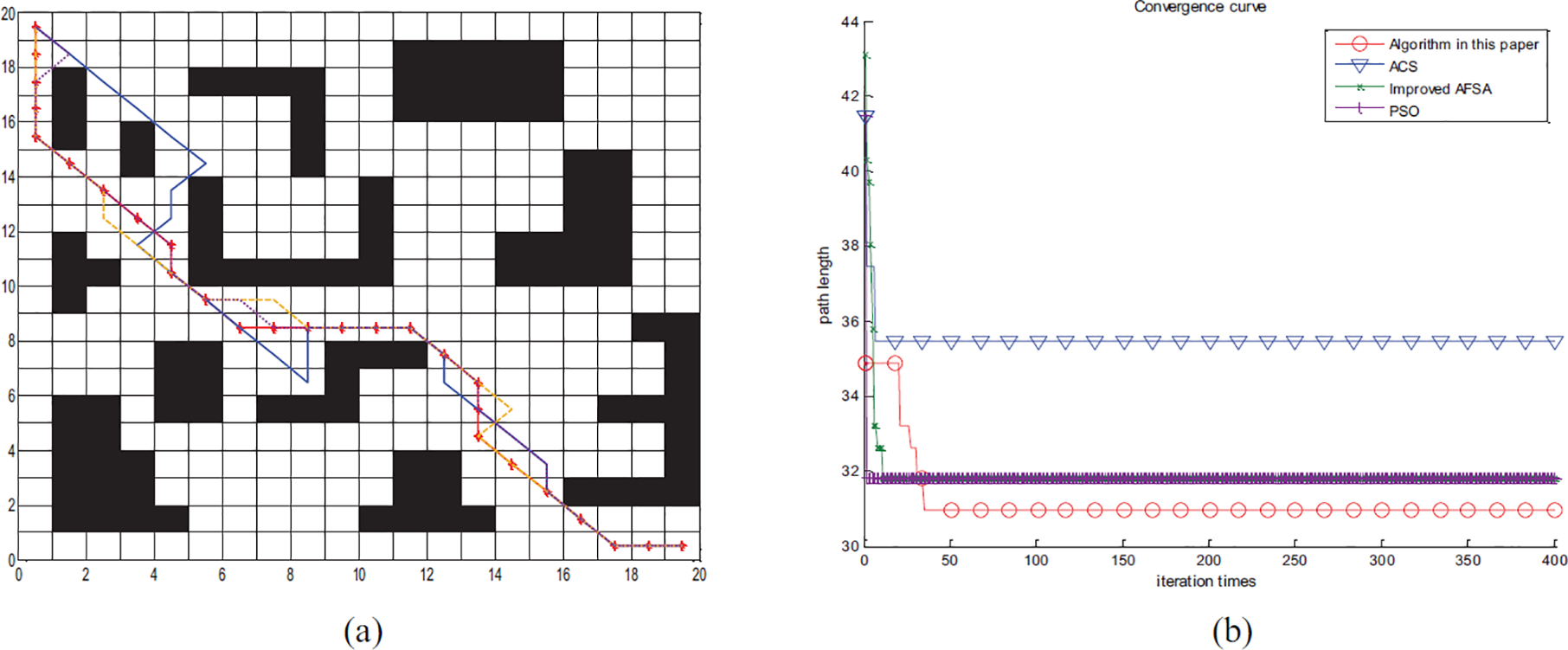
Simple grid environment 20*20: (a) path planning map, (b) convergence curve.
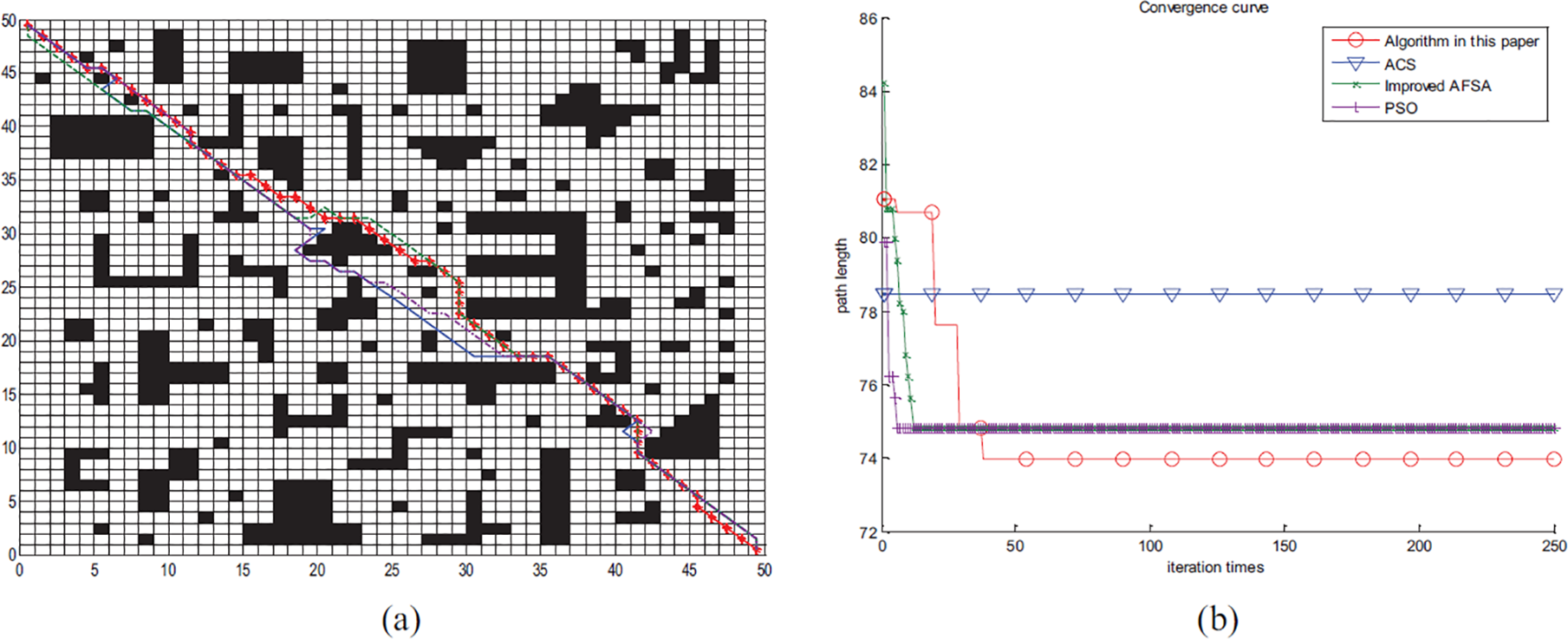
Complex grid environment 50*50: (a) path planning map, (b) convergence curve.
It can be seen from Figures 3 and 4 and Table 5 that the classical ACS algorithm converges quickly when planning the path to avoid a single obstacle, but it is easy to fall into the local optimal solution; the Improved AFSA has a faster convergence speed, and can accurately find the optimal solution in the optimization process, but only six optimal solutions are obtained in 10 experiments, which is not as robust as the algorithm in this paper. And although PSO can seek the optimal solution, its robustness is worse. However, the algorithm in this paper obtains global optimal solution in all 10 experiments, and the convergence speed is not slow.
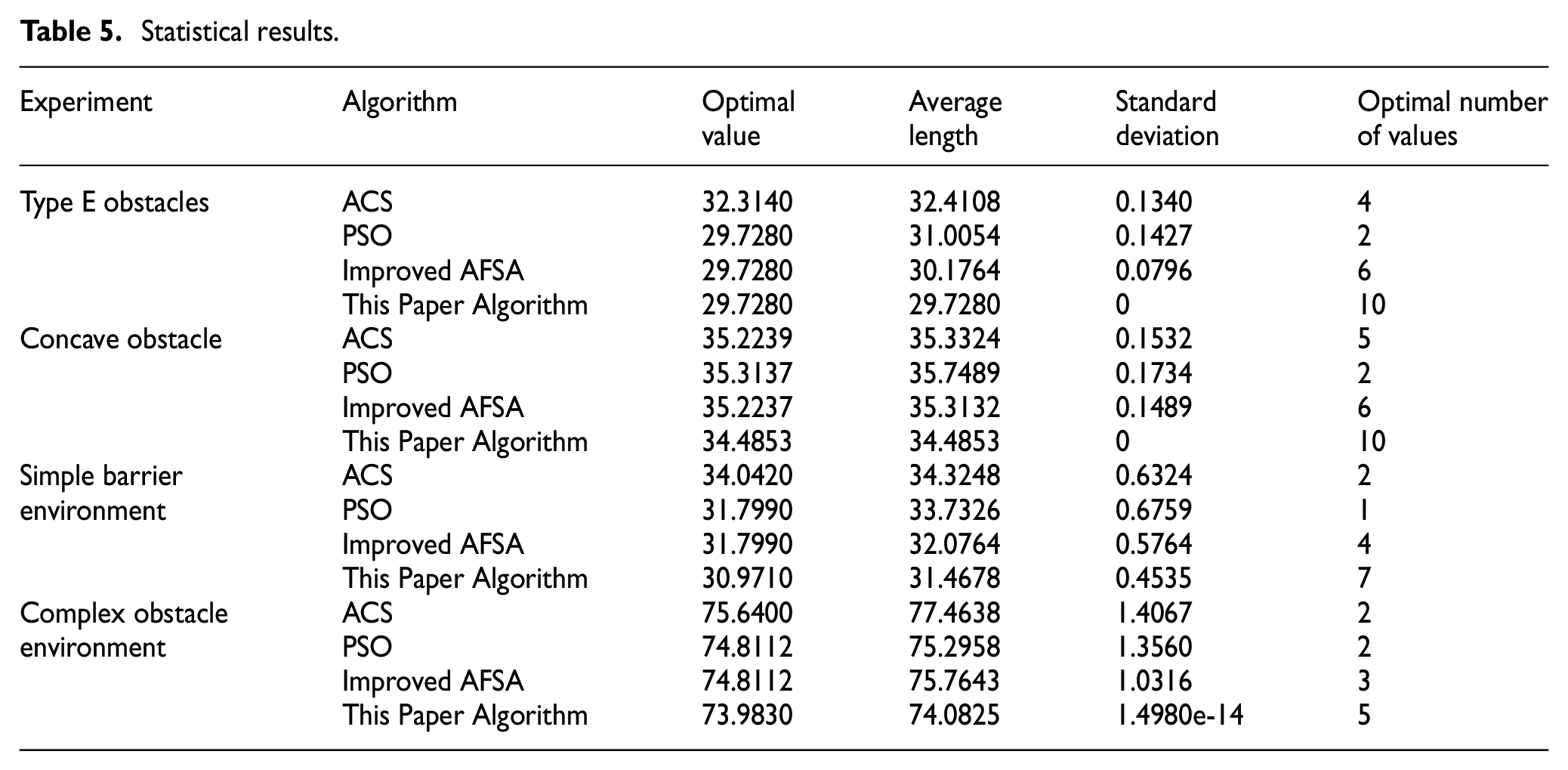
Statistical results.
As can be seen from Figure 5, the classical ACS algorithm, Improved AFSA and PSO will wander when they encounter obstacles in simple obstacle environment, and cannot escape from local optimal solution, and their diversity is obviously poor. However, the algorithm in this paper can obtain the global optimal path while rapidly converging. The experimental results show that the proposed algorithm is more feasible and effective under the condition of simple environmental obstacles.
Figure 6 is a 50*50 grid. The increase of solution space greatly increases the difficulty of the algorithm optimization. It can be seen from Figure 6 that the classical ACS algorithm, Improved AFSA and PSO all cannot quickly and effectively select the global optimal path in the complex obstacle environment, but the algorithm in this paper can still obtain the optimal solution. By introducing the dynamic pheromone volatility, the algorithm in this paper improves the diversity of the algorithm, and integrates SHAA neural network algorithm to improve the heuristic function, strengthen the attraction of the target point to the robot, and obtain the optimal solution. The experimental results show that the proposed algorithm has better performance in solving quality and convergence speed under complex environment conditions.
In Table 5, the optimal path value and average length are used to represent the ability of the algorithm to search the optimal path globally. The standard deviation is used to represent the diversity of the algorithm. The smaller the standard deviation is, the higher the diversity is. The robustness of the probabilistic representation algorithm is used to achieve global optimal value in multiple experiments. According to the statistical results, under the four obstacles, the optimal path value and the average length of the algorithm in this paper are significantly lower than those of the three other algorithms, and the global search capability for the optimal path is enhanced. Under the condition of a single obstacle, the standard deviation of the algorithm in this paper is smaller than that of the classical ACS algorithm, and the probability of obtaining the global optimal value in 10 experiments is 100%, much higher than those of the three other algorithms. Under the condition of simple and complex obstacles, the standard deviation of the algorithm in this paper is higher than those of the three other algorithms and the difference is larger, which can better reflect the high diversity of the algorithm in this paper. The probability of the times of the global optimal value in this paper can reach 50% significantly higher than the 20% of the classic ACS algorithm, 30% of the Improved AFSA, 20% of PSO, show that algorithm in this paper has better robustness.
Based on analysis, in this paper, different kinds of abstacles are used to experiment the algorithms, it is verified that the algorithm in this paper has stronger global search capability, and it overcomes the defect that the ACS algorithm is easy to fall into the local optimal path. The algorithm in this paper has good accuracy and robustness, and has good performance in terms of solution quality and convergence speed.
Conclusion
Classic ACS algorithm in warehousing logistics robot path planning in global search ability is poor, into the local optimum, slow convergence speed. This paper introduces dynamic pheromone volatilization coefficient, and combine SHAA neural network algorithm to put forward a new heuristic function. Increase at the early stage of the iterative algorithm diversity, strengthen the global search ability. In the later to improve the convergence speed, at the same time guarantee the convergence speed. The algorithm has stronger global searching ability. The simulation results show that the algorithm in this paper not only guarantees the quality and the convergence speed of understanding in various simple obstacle environments, but also has good accuracy and robustness in complex environments.
In view of the work of this paper, further research and improvement can be made in the following aspects in the future: in this paper, the impact of dynamic obstacles and irregular obstacles on robot path planning is not considered in the design of environment. So how to avoid dynamic obstacles and irregular obstacles is also of great significance to the research of robot path planning.
Footnotes
Acknowledgements
First of all, I would like to express my gratitude to all those who helped me during the writing of this thesis. I gratefully acknowledge the help of my supervisor, Mr. Chen Haiyang, who has offered me valuable suggestions in the academic studies. In the preparation of this thesis, he has spent much time reading through each draft and provided me with inspiring advice. Without his patient instruction, insightful criticism, and expert guidance, the completion of this thesis would not have been possible. Second, I also owe a special debt of gratitude to the National Natural Science Foundation of China. The research of this paper is supported by the National Natural Science Foundation of China. Last, I should finally like to express my gratitude to my beloved parents who have always been helping me out of difficulties and supporting without a word of complaint.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are partially supported by NSFC (61573285).