
Abstract
This study uses a three-axis Gimbal model to inertially stabilize a platform that can be used to feed smooth images from a camera. In this article, three-axis Gimbal performance analysis is presented. An inertial measurement unit responds to movement and a three-phase brushless DC motor with 14 poles and 12 coils is used to rule out vibrations and movement from the surroundings. The controller combines sliding-mode control and model-free-adaptive control to design a novel control method based on data, which can decrease the computational time and difficulty of a nonlinear system. Simulations on MATLAB prove the efficiency of the given method. The simulation results validate that the designed controller has improved position control than the traditional proportional integral derivative, model-free-adaptive control, and model-free-learning-adaptive control.
Introduction
The camera Gimbal or camera stabilizer platform can automatically detect moving objects using video/image signals. It provides the user with stabilized images of the target information such as target speed and angular velocity. In recent years, it has evolved into a complex system with basic functionalities such as observation or navigation assistance, fire control information, surveillance, reconnaissance, and tracking functions. 1
Different control algorithms were proposed in the past to control the Gimbal control such as proportional integral derivative (PID), 2 sliding mode controller (SMC), 3 linear–quadratic–Gaussian (LQG), 4 linear quadratic regulator (LQR), 5 robust adaptive control, 6 and many other research articles are presented. Almost all of the control depends on the modeling process generally known as model-based control (MBC) techniques. 7
The MBC theory has achieved outstanding success in theory and applications, especially in the fields of industrial operations and aerospace. However, it is a challenging task to enforce the MBC control methods in practical processes and plants, since modeling a practical industrial process is difficult and sometimes impossible. Even if the plant model is established, un-modeled dynamics may lead to unpredictable issues when it is used in practical applications. A huge gap exists among theoretical results and practical application.
Therefore, it is significant to study the model-free-adaptive control (MFAC) methods and their applications, which only utilize input/output (I/O) measured data to design the control system without taking the plant mathematical model.
This article is focused on the data-driven MFAC-based approach.8,9 Design and analysis of the controller depend only on the physical system’s I/O data, regardless of the order of the system. The controller is a hybrid of SMC and MFAC to control the position of a three-axis camera Gimbal platform. The Gimbal platform model presented in this article is used to validate the controller and simulation purposes. The proposed algorithm is compared with PID, MFAC, MFLAC, and MFA-based SMC. The results of the simulation demonstrate that the designed controller performs better than the classic PID, MFAC, and MFLAC controllers.
Design of control algorithm
Design of PID controller
The Ziegler–Nichols tuning method is applied to measure the initial values of the PID controller of the roll axis, pitch, and yaw axis to about zero degree for precise values of pulse-width modulation (PWM). The PID parameter values of the controller are, respectively, 0.157, 0.15, and 0.59.
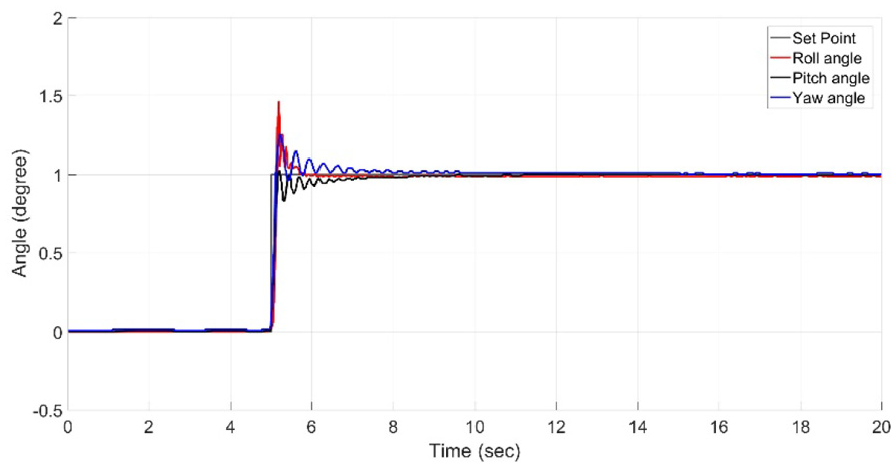
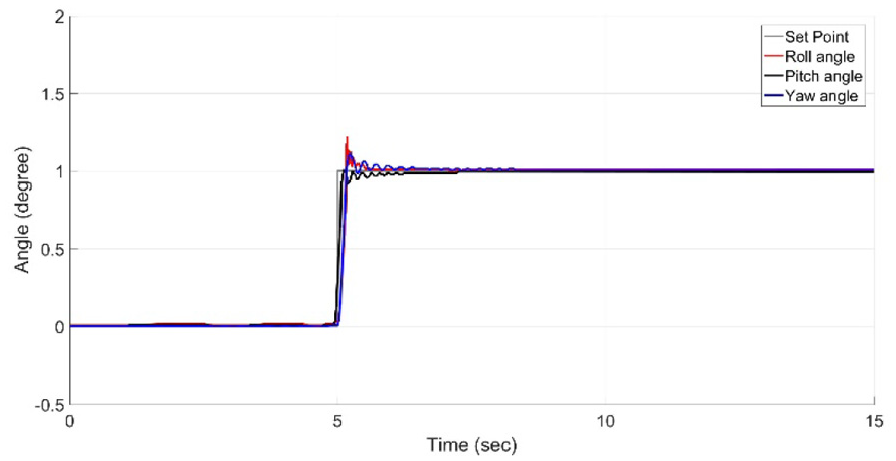
A step response of every axis is evaluated separately after which all the three axes are implemented. It can be observed from Figure 1 that pitch, roll, and yaw are still oscillating for nearly 3 s after only the one-degree step. Yaw and roll both have considerable shooting beyond the limit. Step response using PID control is shown in Figure 1. Manually tuning can generate better results, but no significant improvement is seen.
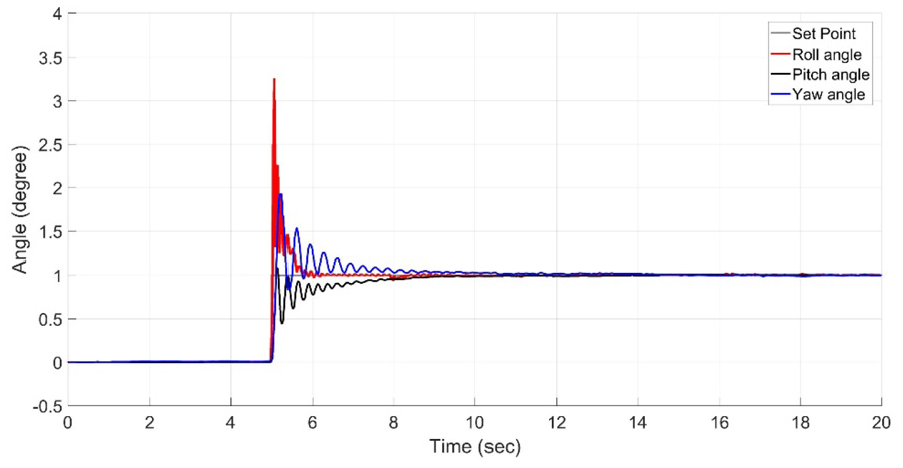
Step response using PID scheme.
MFAC control scheme
The reason for our research is to construct a suitable control system input v(i) so that system output
The data model for the given control scheme is defined as

The scheme must meet the requirements in Meshram and Kanojiya 10 for the compact form dynamic linearization (CFDL) mode transformation. First, to fulfill the smoothness requirement of the system’s dynamics, it has to be a moving continuous system. Second, the system must meet the Lipschitz requirement, which states that a constrained variation in the system input must produce a constrained variation in the system output, given the input does need to exceed the allowed range. 11
Figure 2 represents the general block diagram of the MFAC. The general MFAC control law and the PPD estimation algorithm is given as

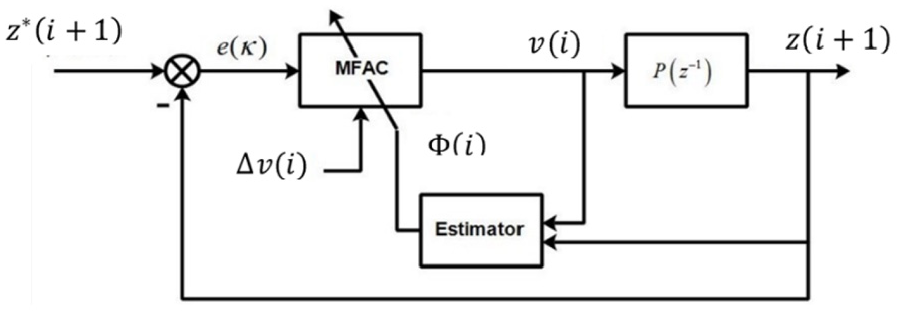
General block diagram of MFAC scheme.
If
The parameters used are
Step response using MFAC scheme.
MFLAC control scheme
Using the weighted control input function, the control algorithm based on MFLAC 12 is

Whereas

This paper also introduces a new constraint in the current techniques for estimating the pseudo partial derivative (PPD), that is

This paper uses the constraint

Whereas
Figure 4 shows the individual axis as the response of using the MFLAC method. The results show that the MFLAC scheme is better than the traditional PID and the MFAC algorithm. There improvement is seen in the overshoot value and settling time.
Step response of using MFLAC scheme.
MFA-based adaptive SMC control scheme
The discrete SMC algorithm 13 is as follows

Whereas

Whereas the preferred tracking route is


Solving equations (9) and (11) gives

Let

Using equation (12) tracking error transforms into

Equations (5) and (13) give
Merging

Substituting

Whereas

Since

Whereas
Equation (16) is a combination of SMC and MFA exponential converges that will cause the decrease in time of regulation. It causes no effect on stability, whereas

The research demonstrates that
The new algorithm turns into

whereas

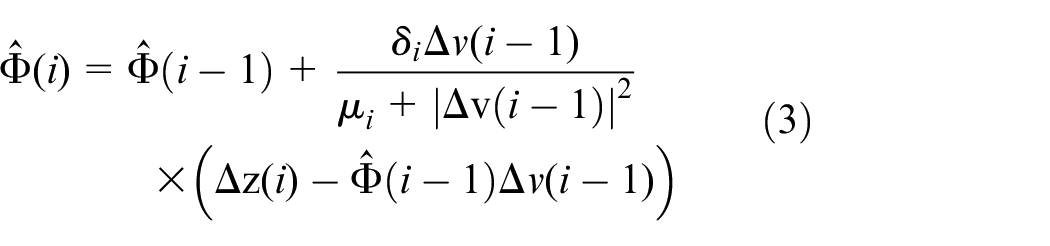
Integrating equations (2), (3), and (17) will generate the hybrid MFA-SMC algorithm. The hybrid MFA-SMC algorithm utilizes PPD parameters and makes use of the I/O data only of the control system, which is apparent from the directly above function. The closed-loop response and robustness can be reduced by the appropriate selection of the weight constant. The proper selection of the
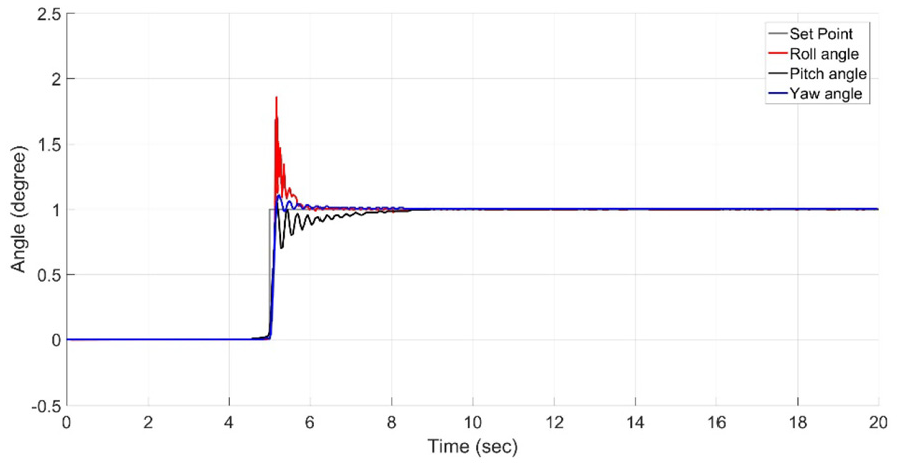
Figure 5 illustrates the individual axis response of using the MFA-SMC scheme. The results show that the MFA-SMC scheme is better than the traditional PID, MFAC, and MFA-SMC algorithm. There is large improvement seen in the overshoot value and settling time. The new algorithm has great impact on performance.
Step response using MFA-SMC scheme.
Comparison analysis of data-driven approach
In this section, performance analysis of the conventional PID, MFAC, MFLAC, and improved MFA-SMC scheme is discussed.
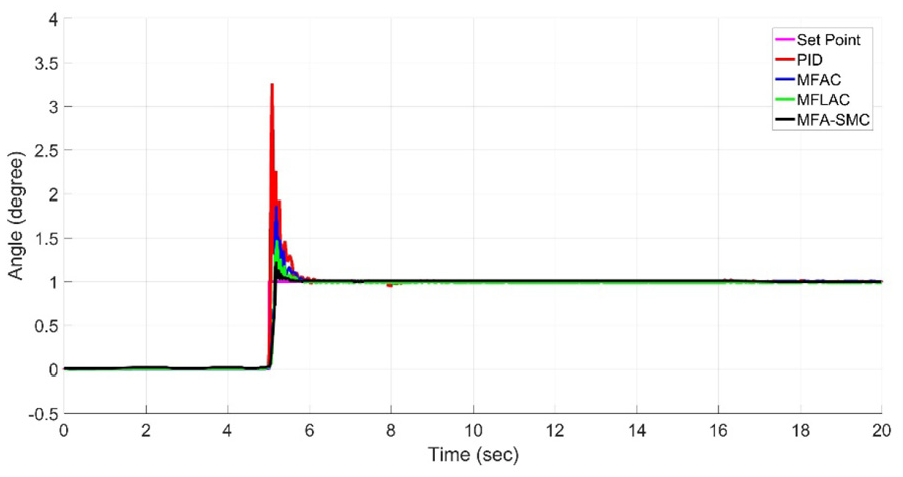
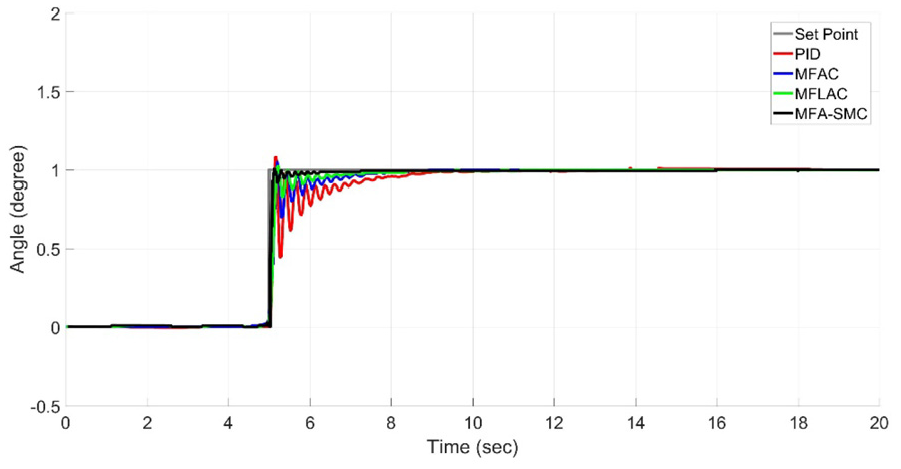
Figures 6–8 show the step response of roll, pitch, and yaw axes, respectively. In Figure 6, in the roll axis the MFA-based SMC algorithm has great improvement in the overall overshoot. In Figure 7, MFA-SMC-based pitch axis control is tracking better than PID, MFA, and MFLAC. Similarly, in Figure 8, MFA-SMC-based yaw control has less overshoot than PID, MFA, and MFLAC. The improved results are presented and the results are summarized in Table 1.
Comparative analysis of roll axis.
Comparative analysis of pitch axis.
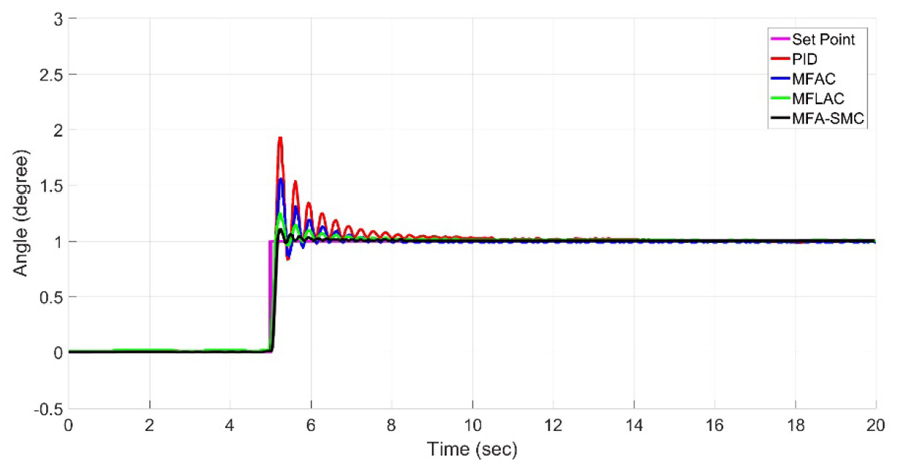
Comparative analysis of yaw axis.
Comparative analysis of roll axis.
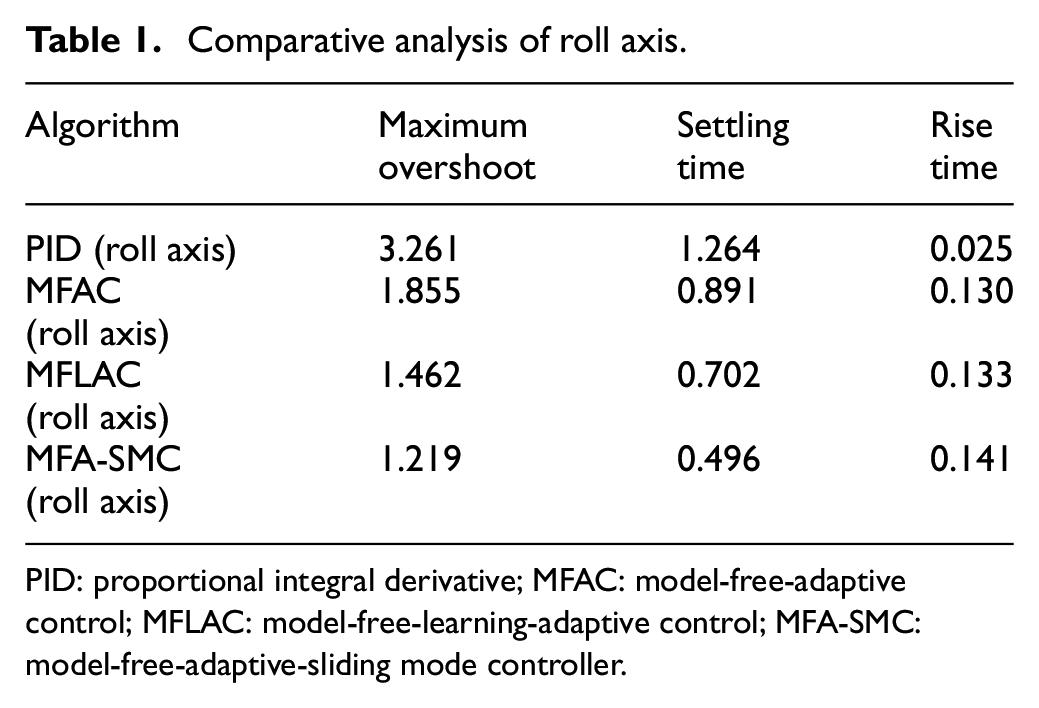
PID: proportional integral derivative; MFAC: model-free-adaptive control; MFLAC: model-free-learning-adaptive control; MFA-SMC: model-free-adaptive-sliding mode controller.
Comparative analysis of the control algorithms is summarized in the tables. Table 1 shows the comparative analysis of analysis of roll axis. Table 2 shows the analysis of pitch axis and Table 3 shows the comparative analysis of yaw axis.
Comparative analysis of pitch axis.
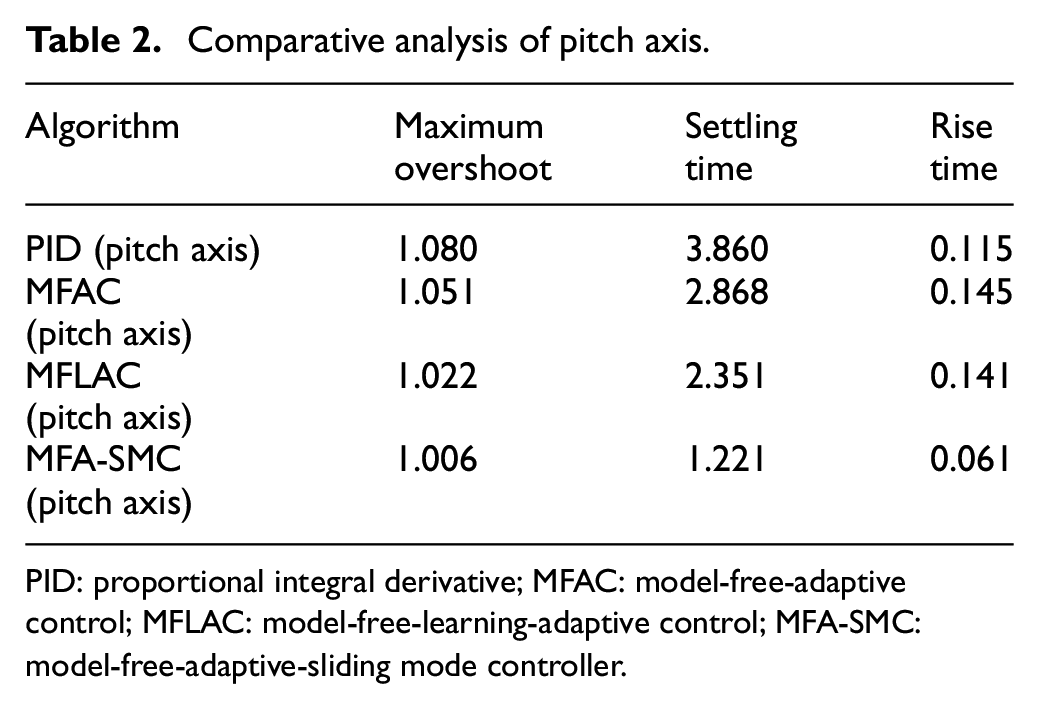
PID: proportional integral derivative; MFAC: model-free-adaptive control; MFLAC: model-free-learning-adaptive control; MFA-SMC: model-free-adaptive-sliding mode controller.
Comparative analysis of yaw axis.
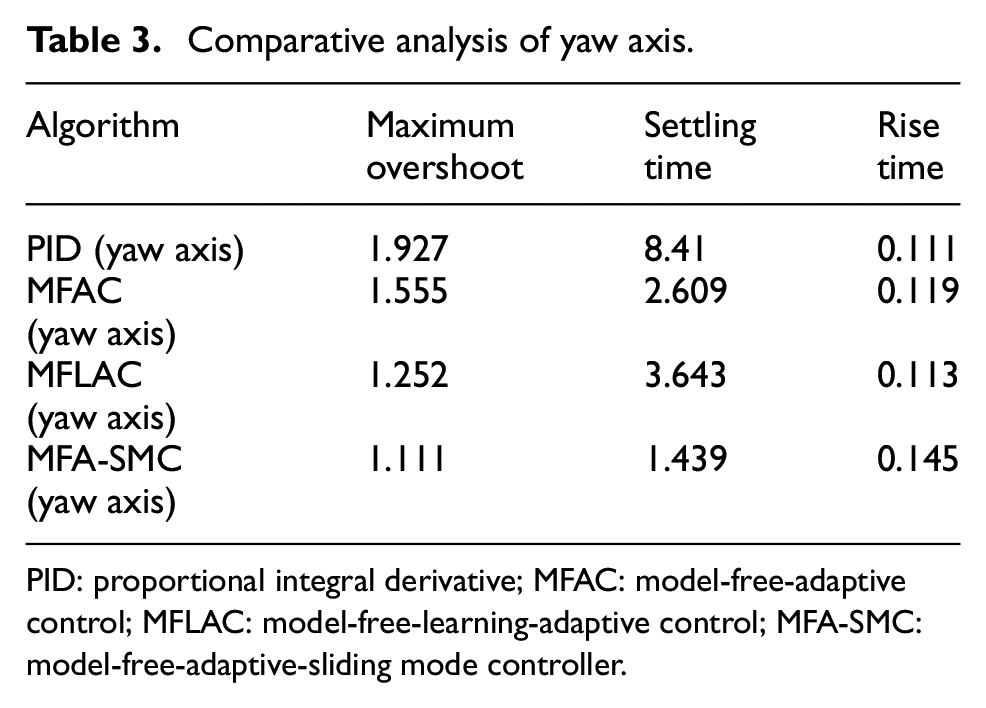
PID: proportional integral derivative; MFAC: model-free-adaptive control; MFLAC: model-free-learning-adaptive control; MFA-SMC: model-free-adaptive-sliding mode controller.
It can be seen from the comparative analysis presented in Tables 1–3 that the MFLAC results are better than the traditional PID and MFAC. But it can be seen that MFA-based SMC control plays a vital role in the improvement of maximum overshoot (1.219), settling time (0.496), and rise time (0.141). Figures 6–8 verify the overall performance.
Conclusion
This article presents the MFAC schemes with application to the three-axis Gimbal platform. A combination of the CFDL-based MFAC and MFLAC, and MFA-SMC control method based on PFDL are introduced with application to the three-axis Gimbal platform, which is based on the PPD using a novel parameter estimation algorithm. Extensive simulations and experiments show that improved MFAC algorithms are capable of controlling various unknown nonlinearity of the desired application when the system model is unavailable. The main advantage of MFA control is that the controller design only relies on the I/O data of the system. The algorithm can be easily used and implemented and has very strong robustness.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.