
Abstract
This paper deals with the finite-time interval observer design method for discrete-time switched systems subjected to disturbances. The disturbances of the system are unknown but bounded. The framework of the finite-time interval observer is established and the sufficient conditions are derived by the multiple linear copositive Lyapunov function. Furthermore, the conditions which are expressed by the forms of linear programming are numerically tractable by standard computing software. One example is simulated to illustrate the validity of the designed observer.
Introduction
State estimation is very important since it can be used in stabilization, synchronization, fault diagnosis and detection and so on. As we know, the uncertainties always exist in the real systems. When we design the observers for uncertain systems, the uncertainties should be taken into account. For the purpose of estimation of bounds of the states, the definition of interval observer (IO) was first introduced by Gouze et al. 1 Then, the IO design method has been established for a large amount of systems, such as linear systems,2,3 linear parameter varying systems,4,5 singular systems,6,7 discrete systems,8,9 impulsive systems 10 and so on.
If we consider a linear discrete system without disturbance, that is,
The investigation of switched systems has drawn considerable attention in recent years.13–15 Switched systems are ubiquitous in many practical systems, such as traffic networks,
16
chemical engineering systems,
17
circuit systems
18
and so on. It is known that the works on IOs of switched systems are still challenging.19–22 He and Xie
19
and Ifqir et al.
20
designed the IOs for switched systems under the assumption that
Motivated by above discussion, the goal of this paper is to design FITO for discrete-time switched systems. In the light of definition of finite-time stability,27–29 the observer gains are selected such that the observation errors are bounded in finite time. The contribution of this work can be concluded as the following aspects:
The bounds of the original systems can be recovered in a prescribed time interval.
The existence conditions of the IO are derived by the multiple linear copositive Lyapunov function (MLCLF), which is a useful tool when dealing with switched systems.
The derived conditions are given by linear programming (LP) constraints which are more tractable than linear matrix inequalities.
The rest of paper is organized as follows. In section “Problem statement and preliminary,” the plant as well as the structure of FTIO is given. In section “Main result,” using MLCLF, sufficient conditions in the forms of LP are presented. Finally, in section “Numerical example,” two examples are simulated to demonstrate the validity of the proposed method.
Notations: throughout this paper,
Problem statement and preliminary
Consider the following plant
where

Definition 1
The interval frame

where
Remark 1
Definition 1 is just the extension of Definition 2 in Rami et al. 2 when the discrete case is discussed. In the light of positive switched system,30,31 we use the MLCLF to analyze stability of the error; thus, 1-norm is employed to describe the bound of the error in this paper.
Definition 2
The interval frame


where
Remark 2
From the aspect of application, the FTIO is necessary. Definition 1 is known to characteristic of the error in infinite-time interval, but Definition 2 is with respect to the boundedness of the error in finite time. In fact, an FTIO may not be an asymptotical IO and vice versa.
We now extend the results of Farina and Rinaldi 32 to positive switched systems. The system is considered as

where
Lemma 1
The system (5) is positive if and only if the matrix
Then, we construct the IO for the system (2), which has the following form
Let
where
Definition 3
Consider the system (7). Let


then the upper and lower error system (7) is finite-time bound (FTB).
Definition 4
Denote the switching number of

holds for given
Lemma 2
Let

where
Main result
In this section, the performance analysis of the error system (7) is presented.
Theorem 1
Let



and the observer gain

then the upper and lower error system (7) satisfies the property of positive and FTB. Furthermore, denote that



where

where
Proof
From Definition 2 and Definition 3, the following proof will be divided into steps:
First, by (13), we obtain

which follows from (12) that

By Lemma 2, we have

Second, the following error system is considered
Let

When
Substituting (13) into (22) results in

By (10), (14) and (16), we can obtain
that is

For the interval
Suppose that
Repeating (26) and (27) yields
From Definition 4, we have

It is the fact that

Substituting (30) into (29) results in

In view of (17) and

When

Considering the expressions

Let us turn to the following error system
The MLCLF candidate is chosen as

By the same treatment as that in the upper error system, one can get

By (17), we have

In view of

In view of Definition 3, the system (7) satisfies the property of FTB. Thus, we can conclude that (6) is an FTIO for the system (2).
Remark 3
The constraints (10)–(12) are the existence conditions of the FTIO (6), while the expressions (14)–(16) are used for the estimation of the boundness of the error. However, the feasible solutions cannot be solved from the conditions (10)–(12) by the MATLAB because of the term
We now give the following theorem, which is necessary from the aspect of computation.
Theorem 2
Let




or




the upper and lower error system (7) is positive and FTB.
Proof
Let us consider the bilinear constraint (12). If
Remark 4
In order to design the IO (6) and give the estimation of the error, we employ the following steps:
Step 1: solve
Step 2: determine
Step 3: compute
Step 4: estimate
From Remark 4,
Theorem 3
If the following convex optimization problem can be solved
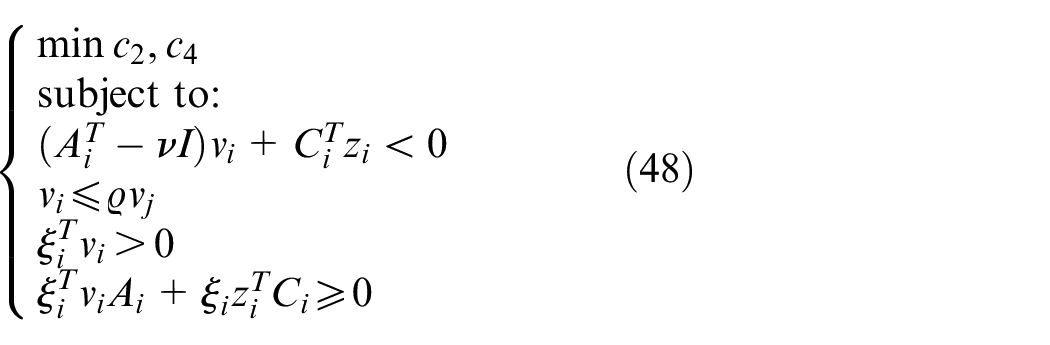
or
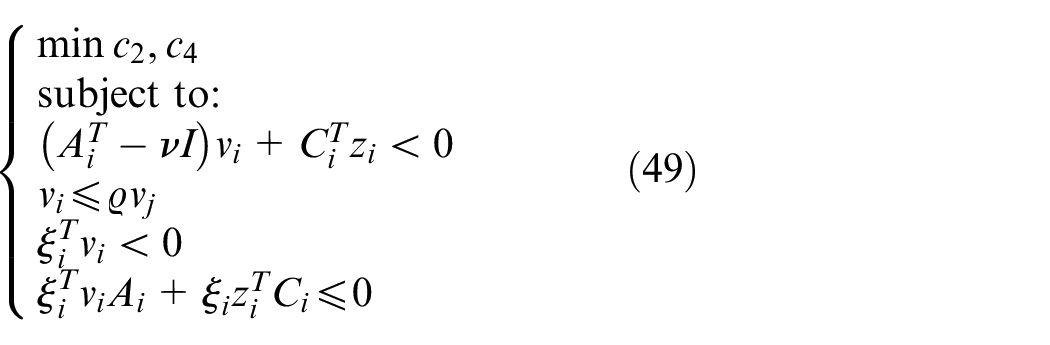
then the IO (6) is an optimal FTIO.
Remark 5
By Theorem 1,
Numerical example
Considerthe system (2) with two modes, and the system matrices are given as
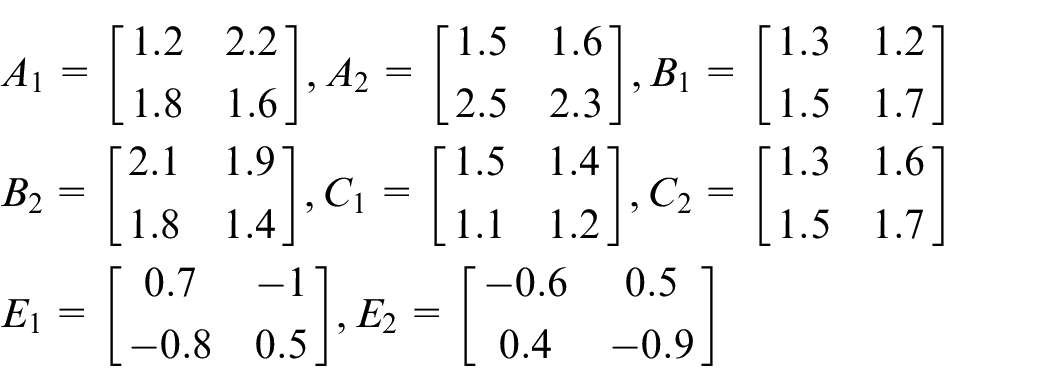
For the purpose of simulation,
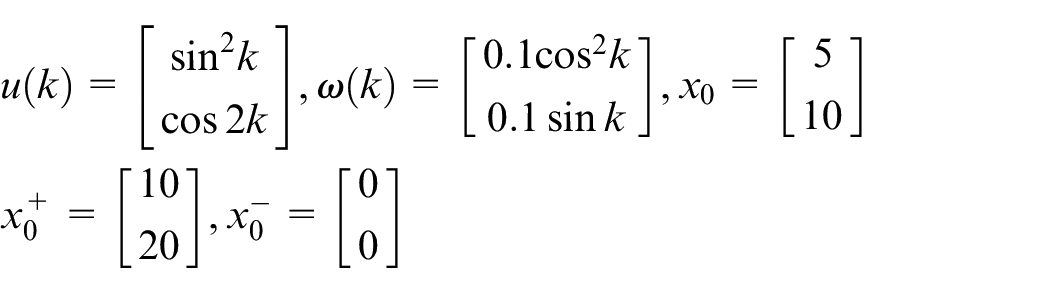
Let
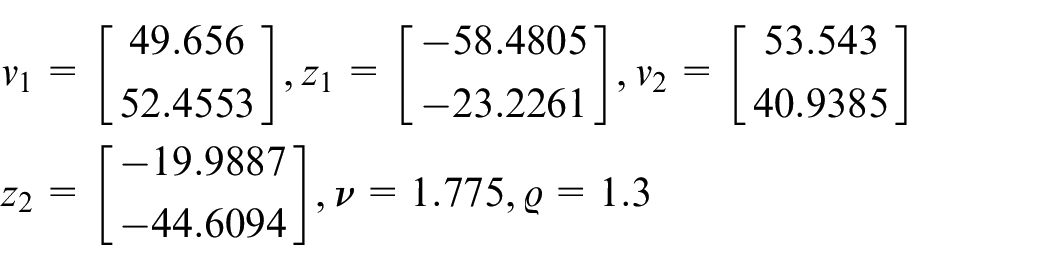
Thus, we can determine the observer gain

the ADT
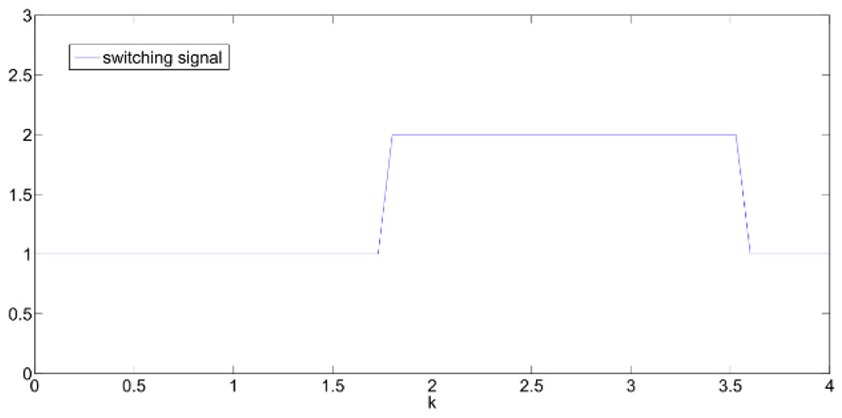
Switching signal
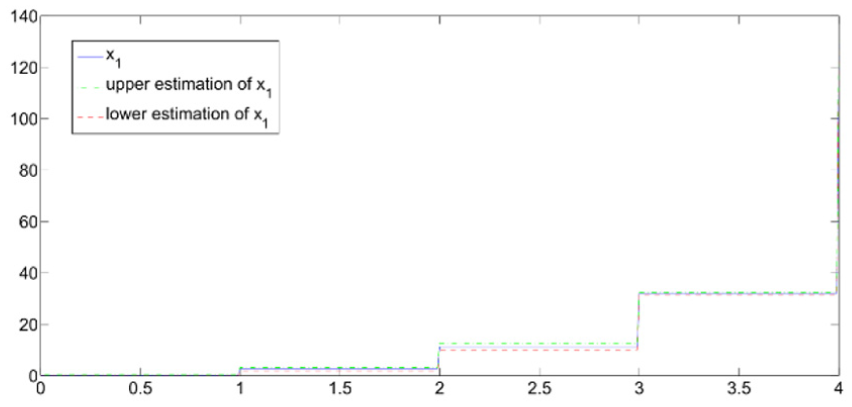
Response of
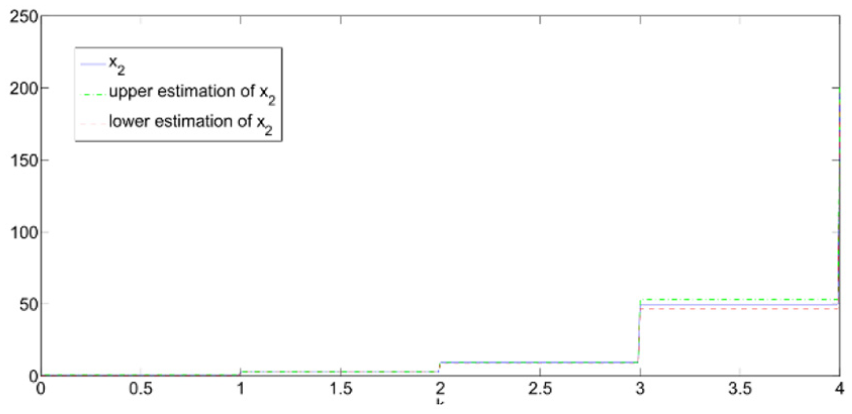
Response of
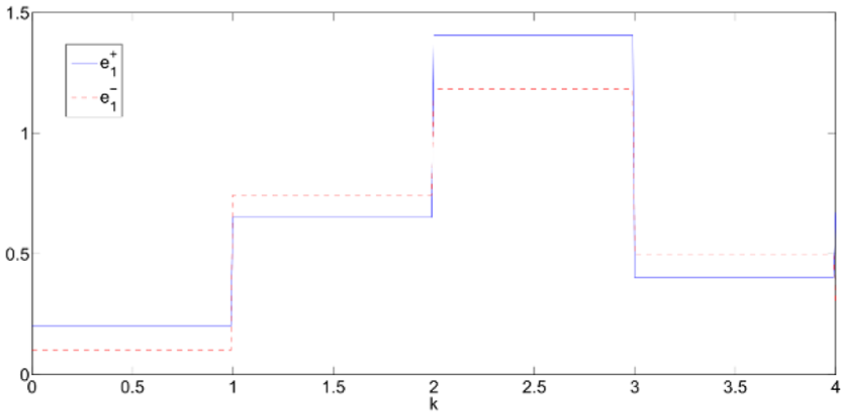
Response of the errors
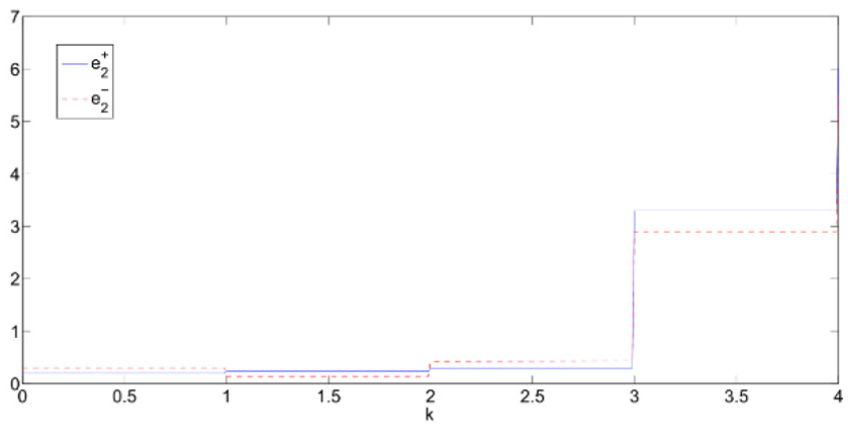
Response of the errors
Conclusion
An FTIO design framework for discrete-time switched systems subjected to disturbances is presented. The framework of the FTIO is constructed and the stability conditions are obtained using the MLCLF. Different from the works herein, such as in the literature,19–22 all the conditions established are given by the forms of LP. Besides, the errors can be kept in a bounded neighborhood for a given time interval. In the future, the FTIO design method for nonlinear switched systems will be investigated.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 61403267) and the Undergraduate Training Program for Innovation and Entrepreneurship, Soochow University (grant no. 2019102 85033Z).