
Abstract
In this research work, an output tracking problem of a kind of nonlinear motion control systems influenced by exogenous uncertainties using second-order super-twisting sliding mode control is studied. It is shown that when second-order super-twisting sliding mode control is implemented with finite-time convergent homogeneous extended state observer, the second-order sliding mode is achieved on the selected sliding manifold with efficient disturbance attenuation from the output. The presented control structure is tested on the air-gap control of an electromagnetic levitation suspension system using MATLAB platform. The observations prove the efficacy of the proposed algorithm providing excellent robust control efficiency along with precise attenuation of various disturbances.
Keywords
Introduction
Modern real-world systems are generally characterized by complicated nonlinear and multi-variable dynamics with various uncertainties such as parametric perturbations, unmodeled dynamics, measurement noises, linearization and approximation errors, and external disturbances.
1
For example, see vessel dynamic positioning system,
2
robot manipulator,
3
DC-DC power converter,
4
missile system,
5
spacecraft,
6
permanent magnet synchronous motor (PMSM),
7
hard-disk drive,
8
magnetic levitation (MAGLEV) suspension transportation vehicle,9,10 and many more practical systems. These uncompensated uncertainties need to be treated properly otherwise they may become detrimental to the desired control performances which could further lead to system instability.
11
Hence, to obtain intelligent and high-fidelity actuated devices, the need of interference attenuation techniques such as adaptive control,
12
robust control,
11
For proper and efficient treatment of the first concern of chattering phenomenon, recently, the high-order sliding mode control (HOSMC) 20 methods have found popularity among chattering attenuation strategies in the literature. These HOSMC methods are widely tested on various applications such as hypersonic vehicles, 21 wind turbine, 22 cable-driven manipulators, 23 vehicle suspension, 24 quadcopters, 25 and so on. However, among HOSMC family members, the super-twisting control (STC) 26 has proven its effectiveness in which control input is applied in the second-order of the sliding variable. Its advantages include effective compensation of Lipschitz perturbations, requirement of only single output variable information, finite-time state focalization to the origin and continuous control signal generation for minimizing chattering phenomenon. 27
The second concern of handling unmatched uncertainty is justified because it has been observed that the major uncertainties present in many MCS such as rail track input in MAGLEVs,
28
load torque in PMSM,
29
external wind disturbances in flight control system,
30
and so on do not adhere to so-called matching condition and hence robust performance out of SMC may not be achieved.
31
Hence, due to the importance of nullifying mismatched uncertainties for getting precise and effective performance from MCS, many decent SMC strategies focusing the mismatched disturbance attenuation have been reported in the literature, for example, Riccati based approach,
32
LMI-based,
33
Another widely used method to address this issue is integral sliding mode control (I-SMC) in which integral type of sliding surface is used for guiding the states to equilibrium from the first instant of time. Because of the simple design and better robustness feature, this method is widely applied in many practical systems.37–39 However, it is commonly known that integral action brings adversity in control action such as disturbance amplification, large overshoot and extended settling time.
To address the issue of robustness of MCS in the presence of mismatched uncertainty, an alternative approach based on estimation/observer technique known as disturbance-observer-based control (DOBC) 40 approach has been presented. Due to its extraordinary advantage of obtaining robustness without loosing nominal control performance, several control methods with different observers designs such as nonlinear disturbance observer (NLDO), 41 equivalent-input-disturbance control, 42 extended state observer (ESO), 43 sliding mode based observers 44 and so on have been proposed in the literature. However, it is noticed that many DOBC designs concentrate only the systems with matched disturbances; there are fewer results focusing systems with mismatched ones.45,46 Moreover, aforementioned DOBC methods are heavily dependent on the plant information for estimation and control design. Among them the ESO, originated from Active Disturbance Rejection Control (ADRC), uses very less prior information that too only the system relative degree 43 which makes it popular in theoretical 47 as well as practical studies.48,49 The conventional linear ESO (LESO) further modified as nonlinear ESO (NLESO) and Generalized Extended State observer (GESO) control 50 in order to address the issue of mismatched uncertainties that are even not expressed in the standard integral chain form. Furthermore, the adaptive ESO 51 also exhibit its efficiency in solving the uncertainty estimation problem. While the ESO methodology has been often used widely, the mathematical analysis of stability, convergence time and so on are not performed rigorously. Guo and Zhao 52 have proposed the stability analysis of a nonlinear ESO with system modeling uncertainties, but it results in the asymptotic stability under various complex assumptions. A finite-time ESO 53 has been designed for projecting mismatched uncertainties. However, it requires the high-order time derivatives of the uncertainties to be bounded with certain constant number.
Owing to the above discussions, the authors tried to address the issue of mismatched uncertainties present in the MCS using finite-time convergent ESO to obtain better convergence speed and stability performances.
The primary contributions of this paper are briefly emphasized as follows:
Motivated from the existing finite-time convergent observers, the conventional ESO is modified with the help of homogeneity principle and termed as homogeneous extended state observer (HESO).
The need of system information is kept as minimum as possible by selecting a dynamic sliding manifold which is designed with the help of system output and observer predicted nominal states.
A continuous and chattering free guidance law is used for the states to reach the proposed dynamic sliding manifold in finite time.
The overall control structure is kept simple and effective by combining the HESO with the conventional STC for counteracting the adversities of exogenous matched as well as unmatched disturbances.
The remaining article is cataloged as follows: Section “Problem description and control objective” formulates the general MCS problem and its control objective is specified. Section “The proposed controller design” proposes the HESO-based second-order STC (HESO-STC) for the systems with uncertainties. The section “Performance analysis of different ESOs” shows the comparative analysis of LESO, NLESO and HESO applied on a standard servo motor with the help of MATLAB simulation. In section “An electromagnetic suspension (EMS) vehicle example,” an application of electromagnetic suspension transportation system is presented for testing the proposed control algorithm. To showcase the efficacy of the proposed law, simulations results are studied in section “Simulation results.” Finally, the ending remarks are summarized in section “Conclusions.”
Problem description and control objective
Consider the following general MCS with input relative degree of
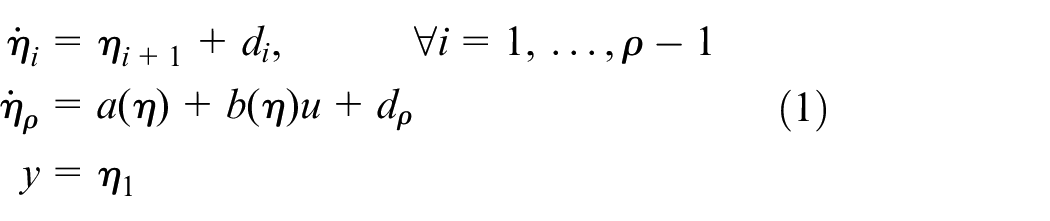
where
Assumption 1
The disturbance
Remark 1
The above asssumption on the disturbance
The main intention is to construct a sturdy, finite-time HOSM-based feedback controller u which could compel the output y of the system (1) to stabilize at a pre-defined position

where
The proposed controller design
To initiate the design of the rugged, finite-time convergent HESO-based super-twisting sliding mode controller (HESO-STC) for the system (1), a novel sliding manifold is designed as

where the parameters
The variables
Remark 2
From author’s point of view, the considered sliding manifold (equation (3)) is different from the conventional sliding surface because the selected manifold depends only on the information of the MCS output and estimated states from the observer/estimator. Hence, it is justified to say that equation (3) needs minimum information from the system and depends only on the outputs.
Next, the design approach of HESO—a
HESO
The HESO is a special type of ESO which follows the design procedure of homogeneous state observer.
55
The general design of
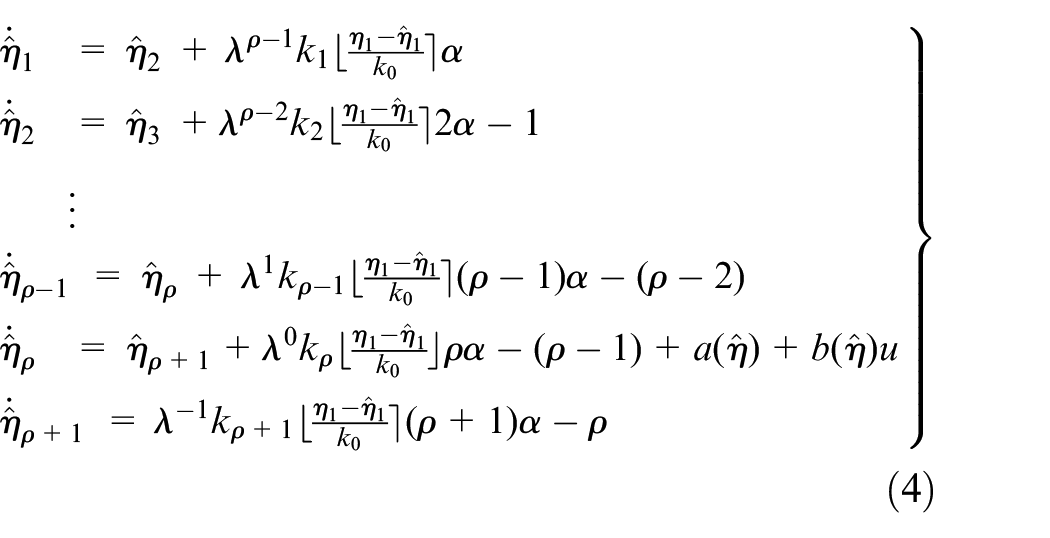
where
The baseline idea of the HESO is same as that of ESO
57
in which the observer states
Convergence analysis
In order to establish the convergence of the HESO equation (4), definitions of the homogeneity principle and finite-time stability along with relevant assumption and lemmas are presented herewith.
Definition 1
A function

for all
A vector field

for all
If

Definition 2
The following system

is globally finite-time stable, if it is Lyapunov stable, and
Let us denote the error variable as
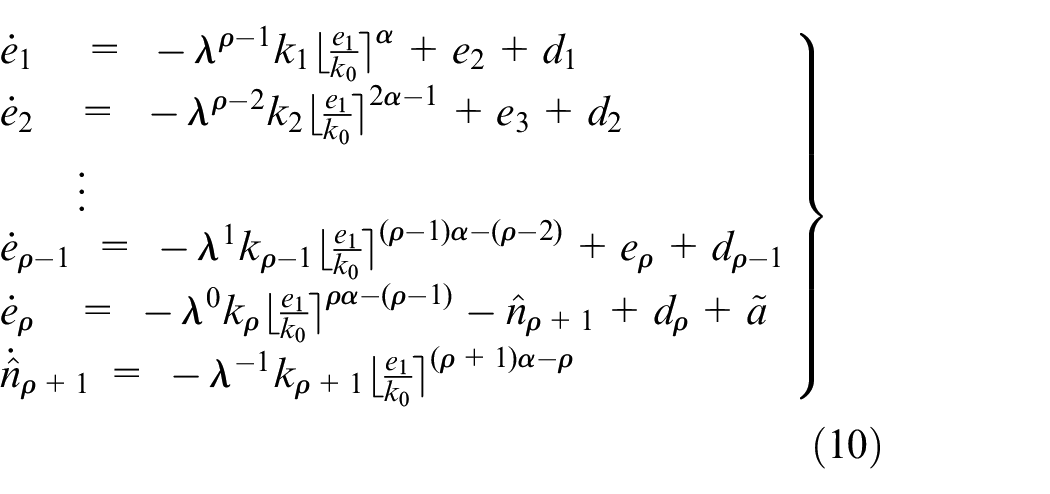
where
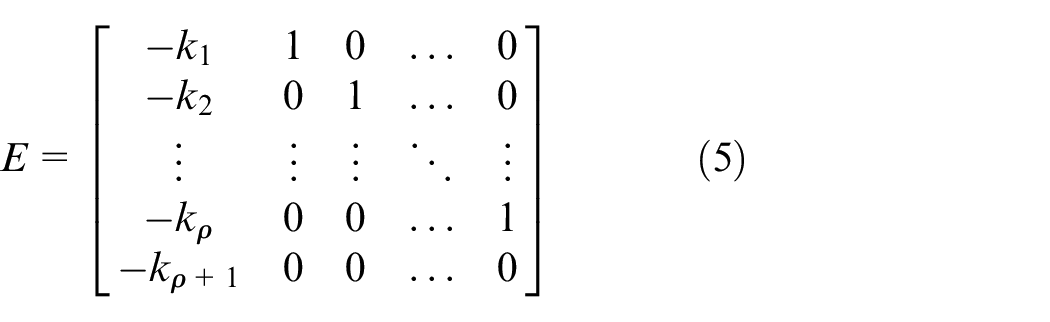
Furthermore, let us follow the new coordinates as
where,
Using equation (11), the coordinates of the system (10) are transformed as

which immediately follows that
where
Using the Lemma 4.2 of Bhat and Bernstein,
58
Lemma 2, 3 and Theorem 2 of Guo and Zhao,
52
it can be shown that error equation (12) is a disturbed representation of global finite-time stable system
To test the above narration and check the homogeneity of

where,
Lemma 1
Considering the nonlinear system (1) with bounded and continuous disturbance
Now, the overall design of the HESO-based second-order STC is elaborated.
Design of HESO-based second-order STC
In this section, a HESO (equation (4)) based continuous and finite-time control law relying on
Theorem 1
Considering the system (1) and the sliding surface defined as equation (3) and control law u as
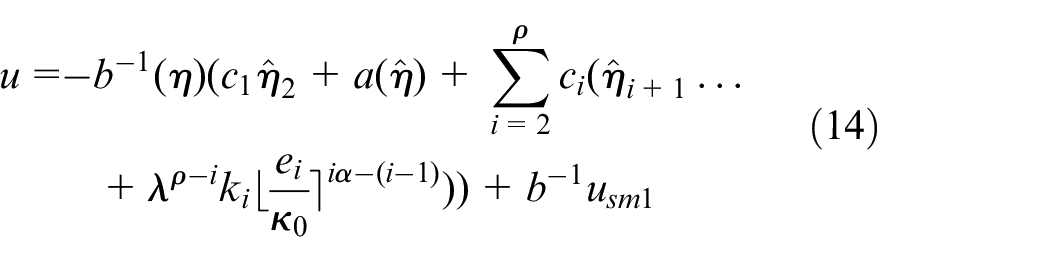
with

where,
Proof
The time-derivative of the sliding surface (equation (3)) is given as

Substituting equation (1) in equation (16), we get
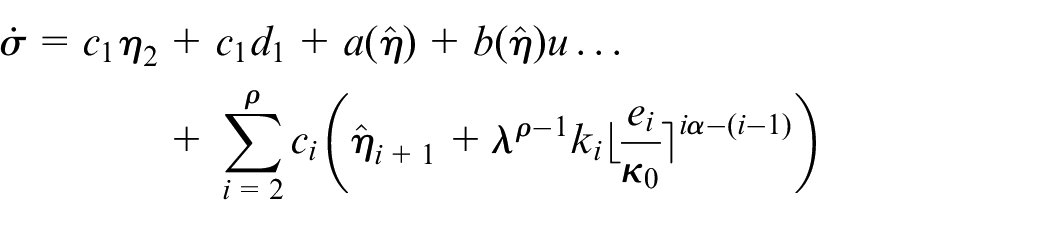
Since, with proper tuning, the HESO (equation (4)) will predict the actual data of the states hence substituting
Substituting the control input equation (14) in equation (17), we get

Defining a new variable as

Equation (19) is a second-order super-twisting algorithm.
Using Theorem 2, Page 1036 of Moreno and Osorio 60 and its proof, it can be presented that the following Lyapunov function

is quadratic, strict and robust with symmetric and positive definite matrix P, will satisfy

almost everywhere, for symmetric and positive definite matrix Q. Moreover, the time taken by a trajectory originating at

The gains
Performance analysis of different ESOs
In this section, a comparative analysis on the performances of different ESOs viz. linear ESO (LESO), nonlinear ESO (NLESO) and homogeneous ESO (HESO) are demonstrated with the help of a classical servo system.
A classical servo system is represented as

where,

where,

Considering

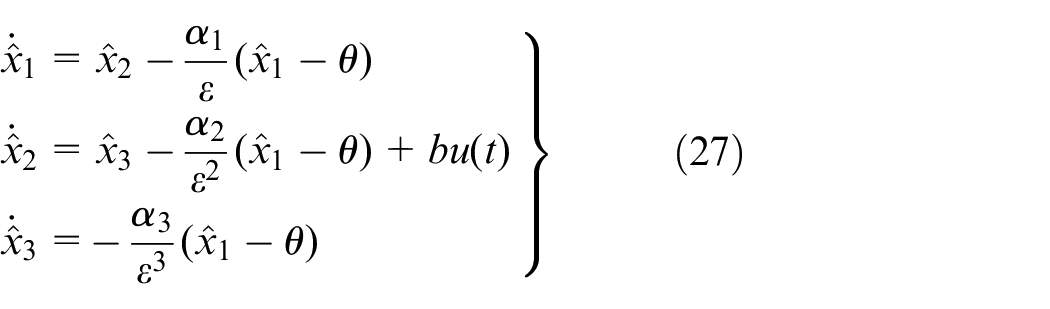
The structure of different extended state observers considered for estimation analysis of states
The LESO is designed as
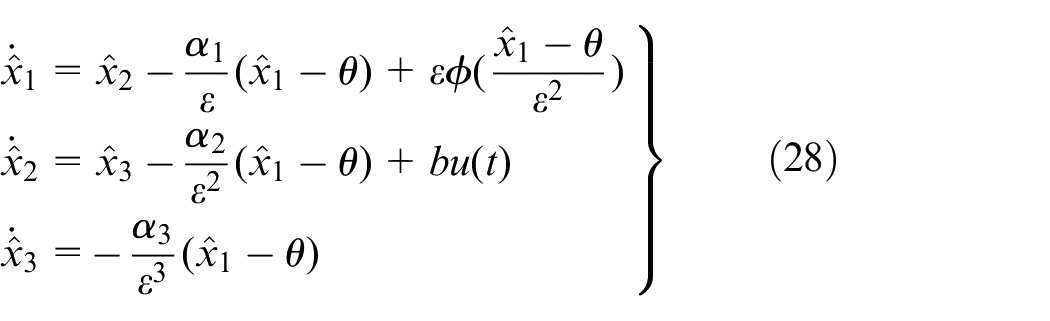
The NLESO is designed as
The HESO is designed as
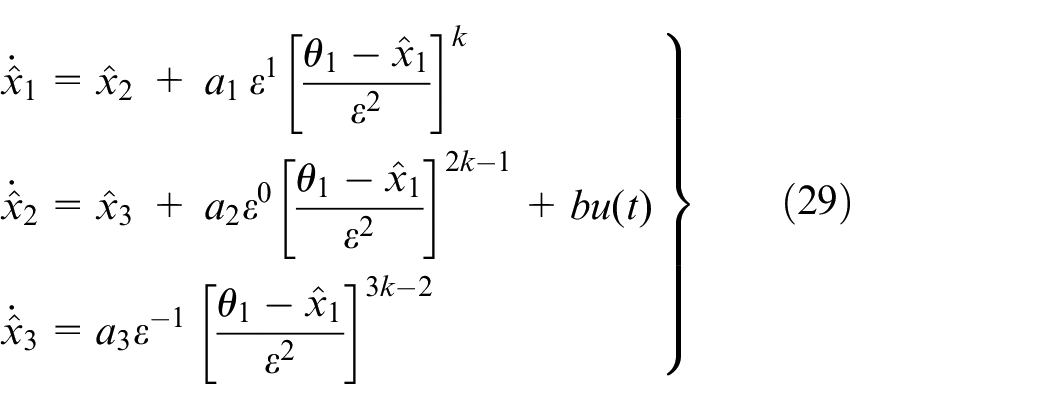
The simulation using MATLAB has been performed using ESO variants given in equations (27)–(29) on the system (26) and the comparative performances results are shown in Figures 1–3. The system model parameters are taken as J = 10, d(t) = 0.3sin(t), f(t) = 0.3sin(t). The initial states of the plant are assumed at (0.5,0) while that of the observers are considered at (0,0,0). The settings used during simulation tests are α1 = 5.5, α2 = 10.5, α3 = 6.1, ϵ = 0.01 and k = 0.8. The function ϕ(·) is a nonlinear function as used by Guo and Zhao. 52 The settings are kept same for all three observers to have better demonstration of the comparative performances. The results show that with the same tuning parameters, the HESO observer equation (29) has outperformed others in estimating the states x1, x2 as well as disturbance x3. Figure 1 depicts the faster convergence property of HESO. Figures 2 and 3 illustrate that the despite of little higher peak in HESO, still it is performing well in estimation of other states. The peak obtained during initial time of HESO estimation can be reduced by adjusting the parameter ϵ which governs the speed of convergence.
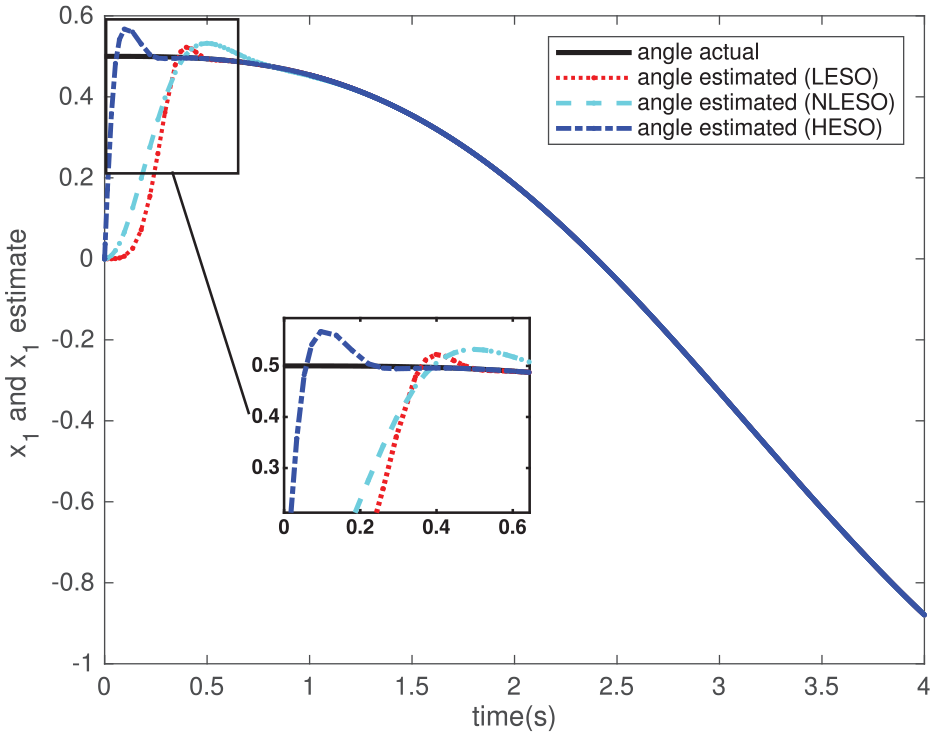
Profile of states
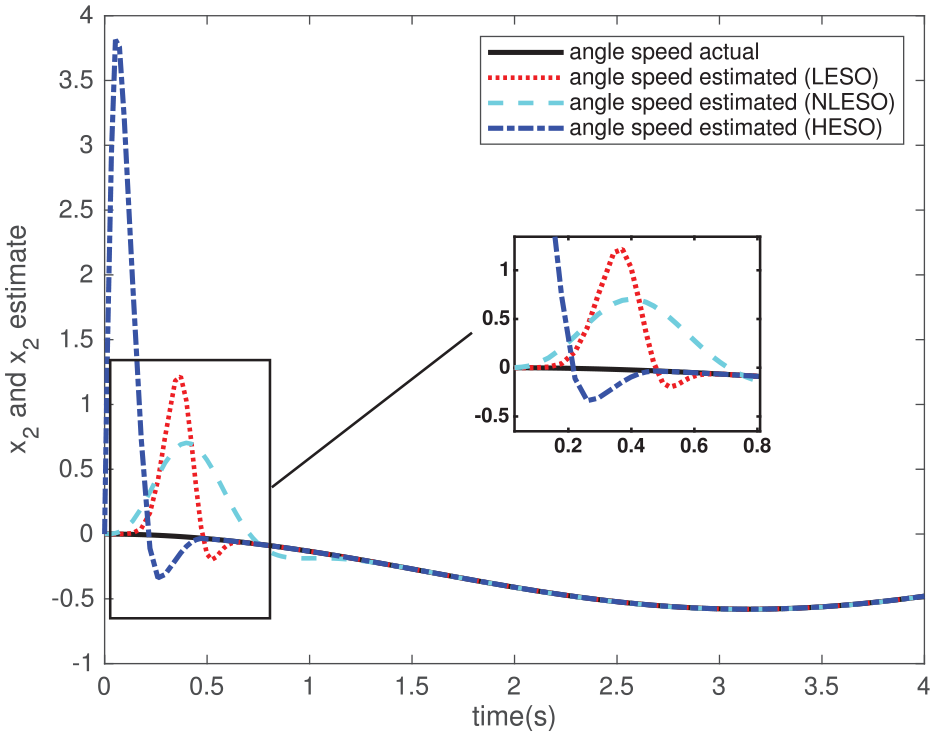
Profile of states
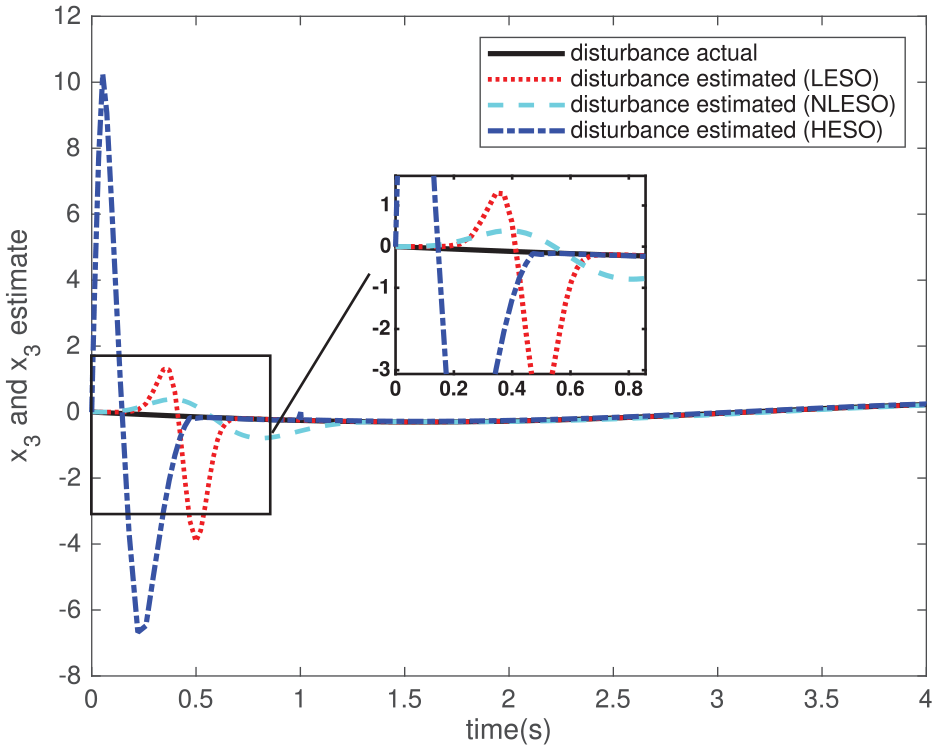
Profile of states
An electromagnetic suspension (EMS) vehicle example
Nonlinear EMS system model
The EMS vehicle system nonlinear model shown in Figure 4 61 is given by
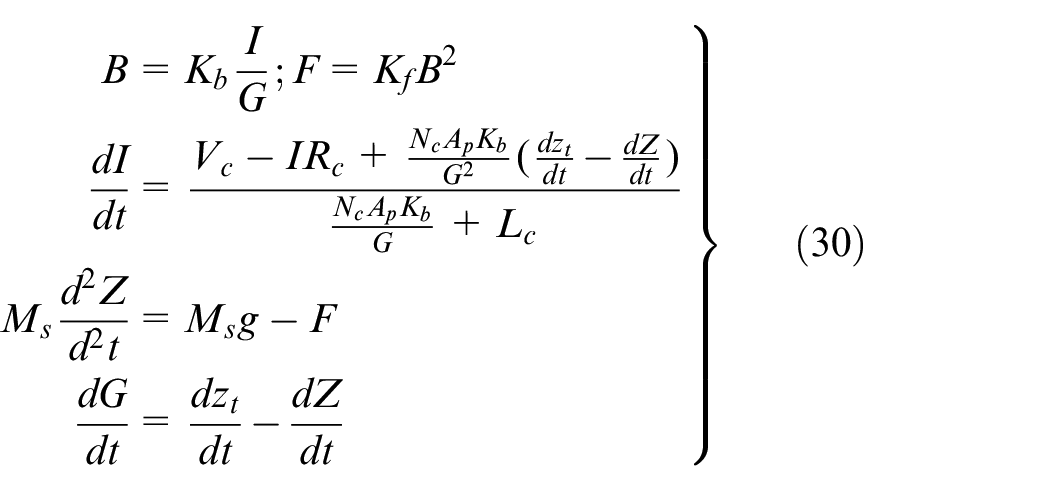
where I represent the current,
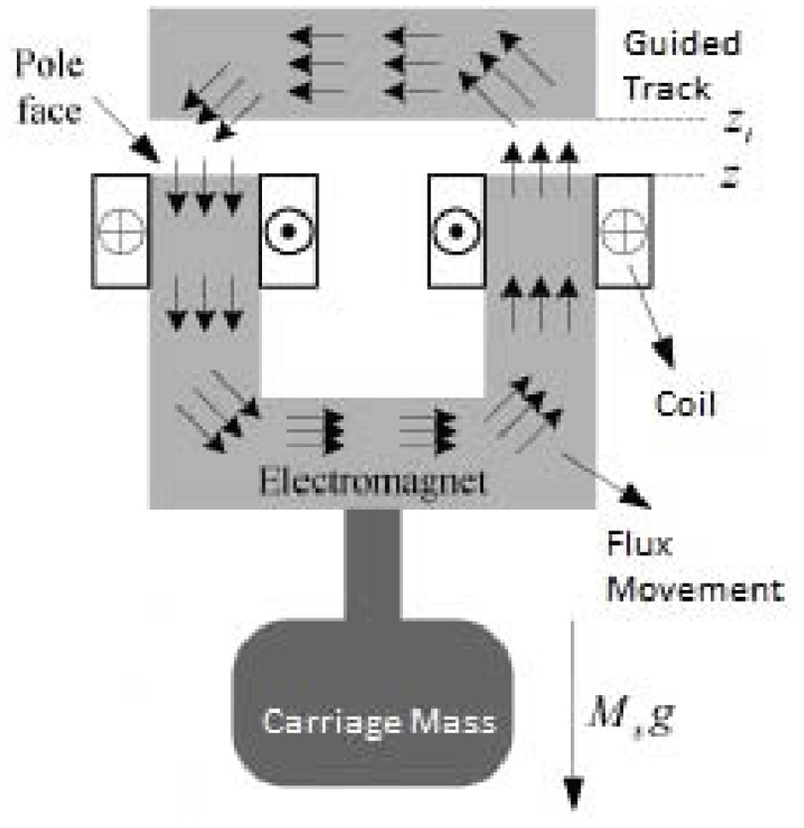
MAGLEV suspension vehicle. 62
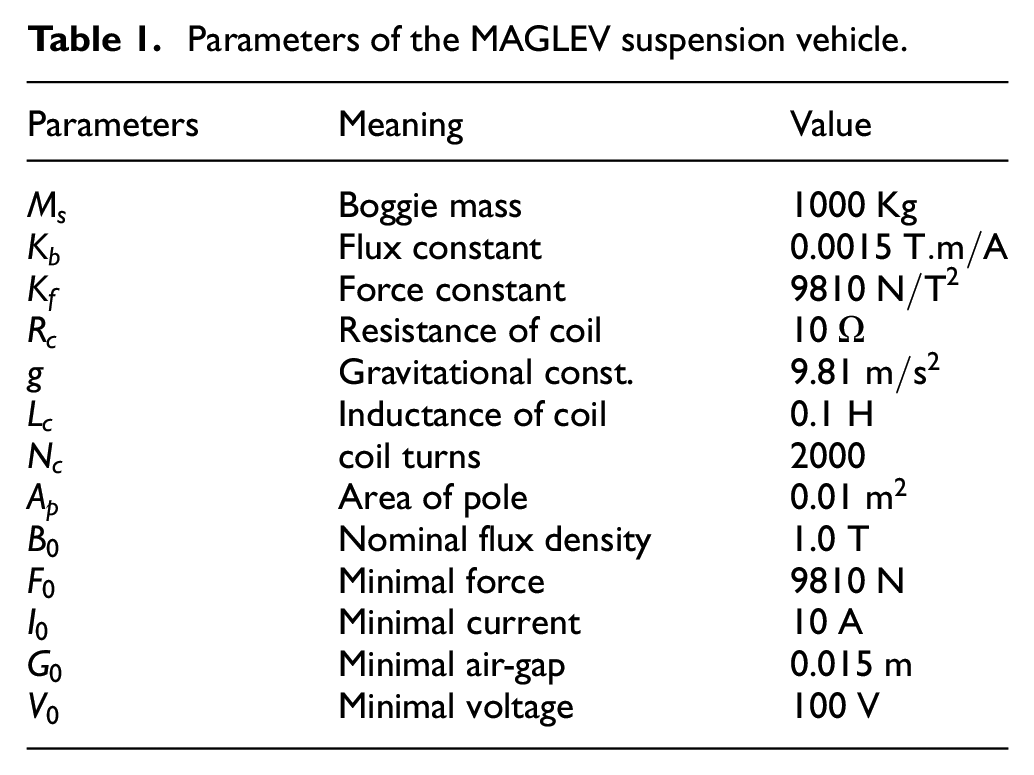
Parameters of the MAGLEV suspension vehicle.
Linearized model
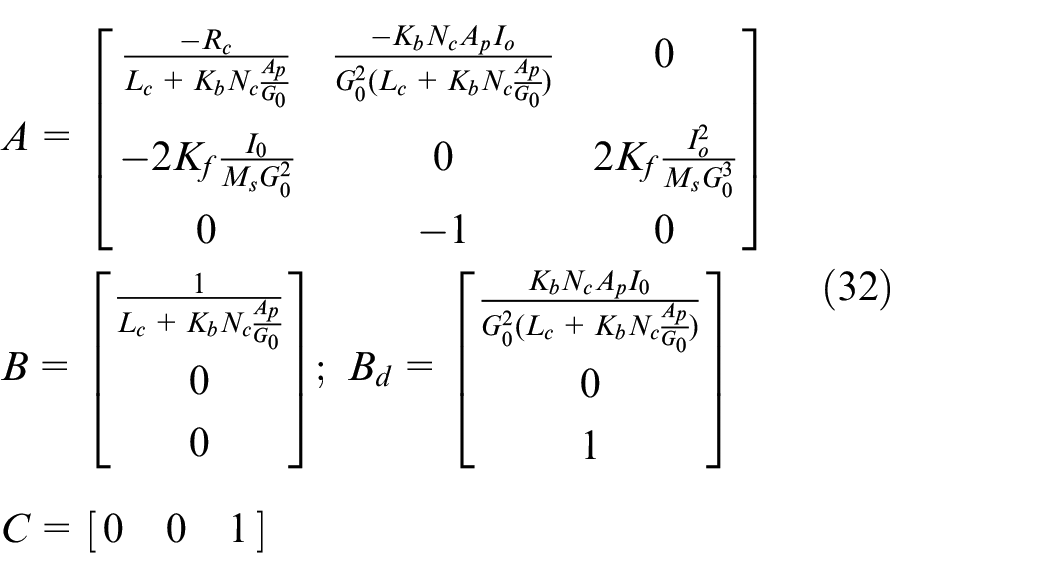
To transform the nonlinear MAGLEV model (equation (30)) into the selected design formation (equation (1)), the model linearization technique described by Michail 61 is used to apply the designed control technique. The linearized dynamic model of MAGLEV suspension vehicle operating with nominal values tabulated in Table 1 is written as

where the states
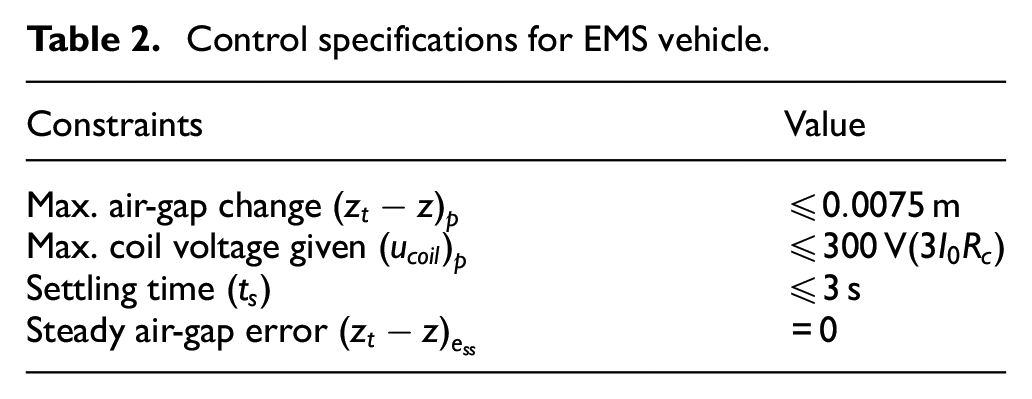
The control requirement is to maintain the gap position in presence of the major disturbances which is the track input to the suspension originated vertically. The control specifications for the EMS under the influence of the deterministic track input are tabulated in Table 2. 61
Control specifications for EMS vehicle.
Controller design
The high-order nonlinear expression

It is worth to mention that the lumped disturbances (equation (33)) are generally very feeble as compared with the strong system dynamics and hence it is reasonable to assume that such disturbances can be compensated by the presented control method. Using equations (31) and (33), the complete dynamic model of the EMS vehicle is represented as

where

where
Substituting equation (32) in equation (35) gives
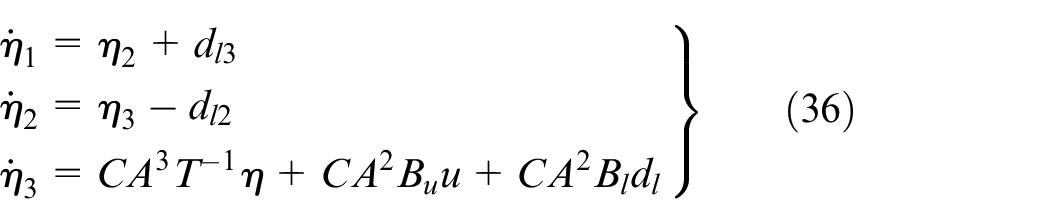
where vector
The sliding surface for system (36) as per equation (3) is selected as

where
where
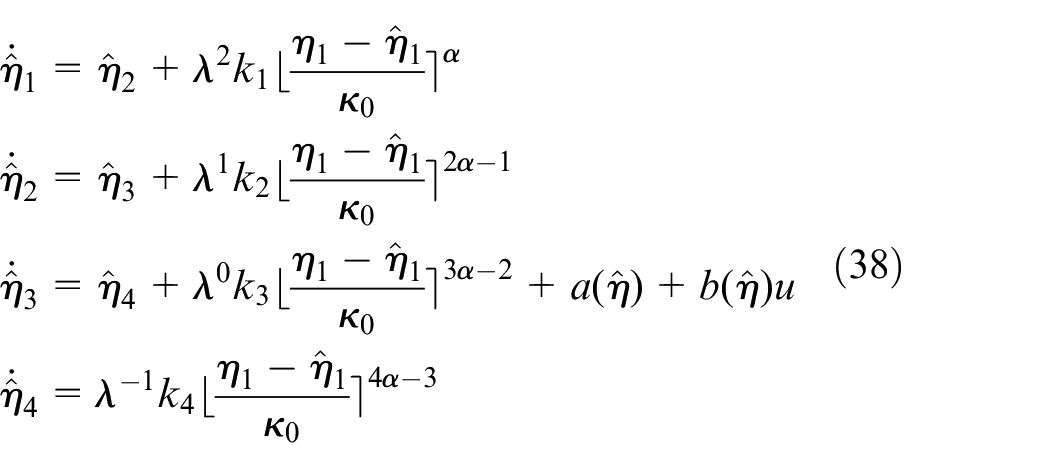
Based on the above analysis, proposed HESO-based
Simulation results
Simulation results obtained from MATLAB are presented here to corroborate the efficacy of the overall system performance. To better showcase the claim, the proposed control method is compared with the Integral sliding mode control (I-SMC), 64 a popular and effective strategy to suppress the mismatched uncertainties.
The I-SMC is generally described with the sliding surface

The simulations tests are carried out on a full nonlinear EMS system under the influence of a measurement noise environment. The tuned control parameters of both the strategies are enlisted in Table 3.
Controller parameters of the EMS vehicle.
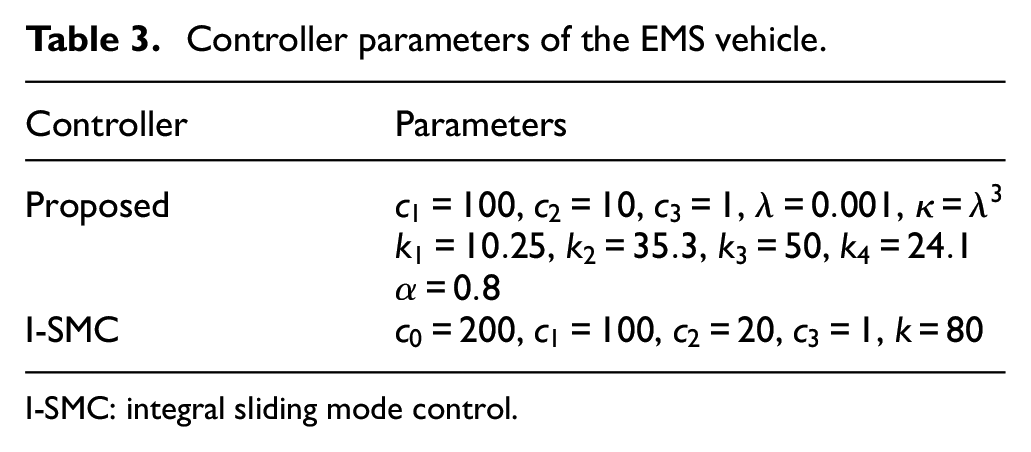
I-SMC: integral sliding mode control.
External disturbance rejection
During simulation, the track input considered is shown in Figure 5.
61
It shows 5% gradient at a vehicle speed of

Profile of vehicle track input with 5% slope at 15 m/s vehicle speed.
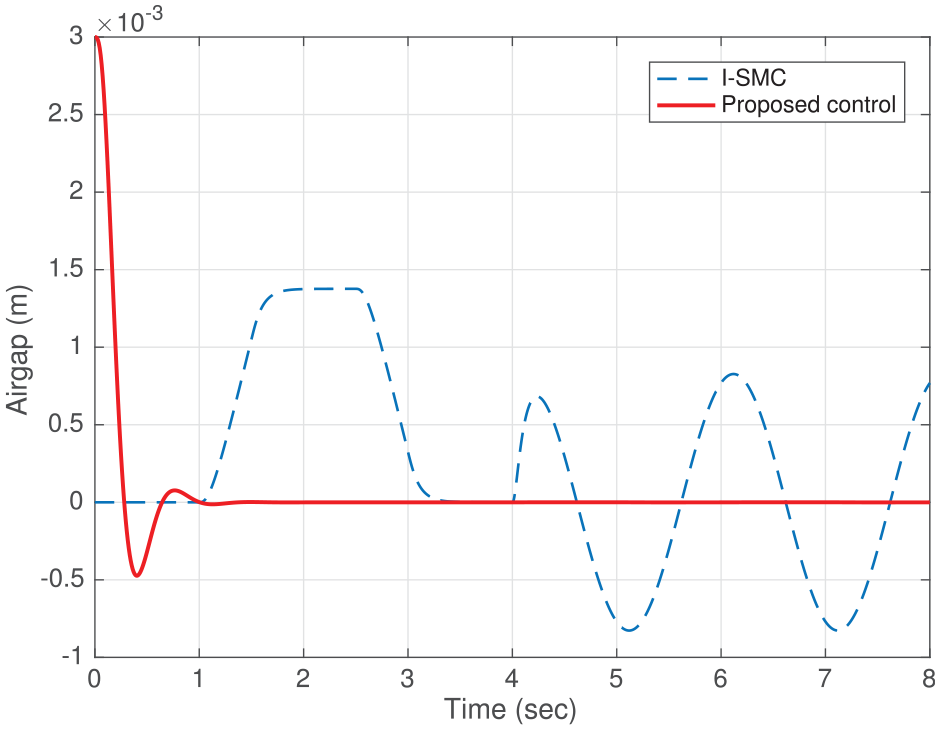
Air-gap
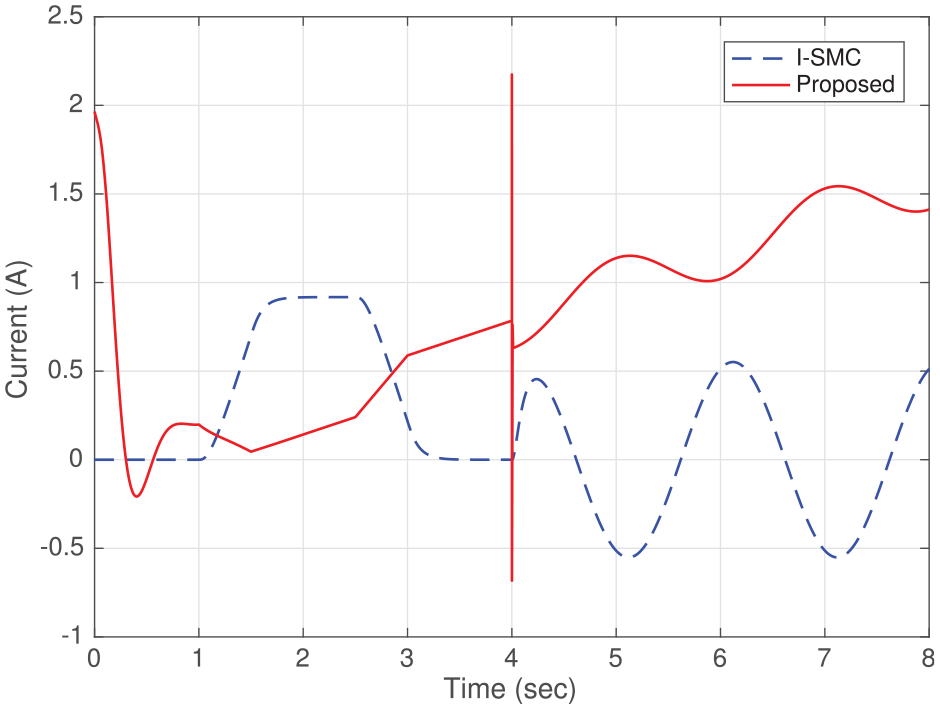
Current (i) v/s time response of EMS vehicle with external disturbances.
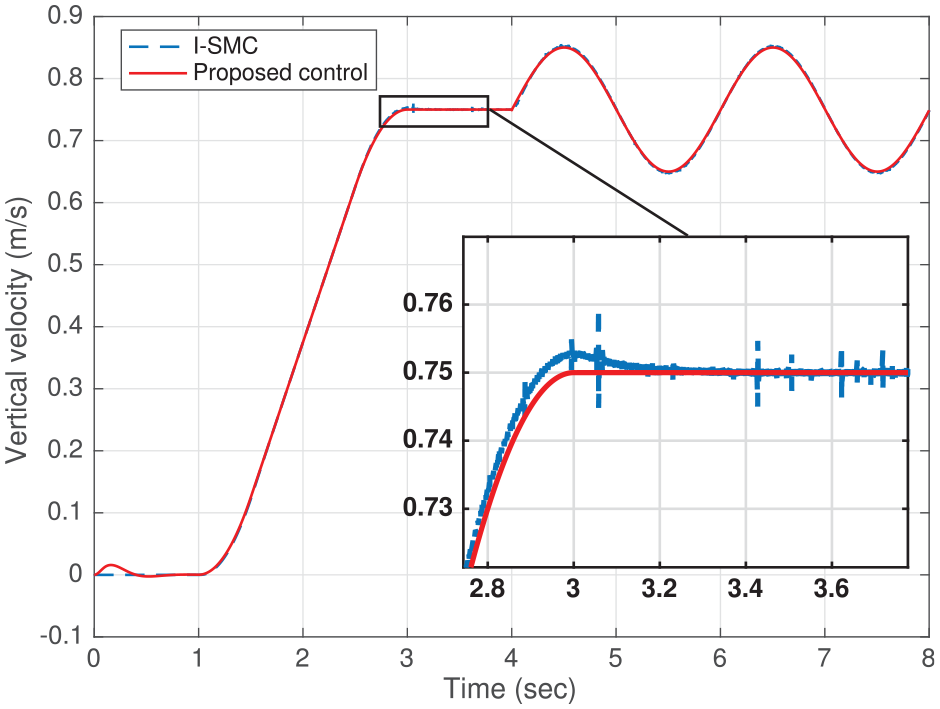
Vertical velocity
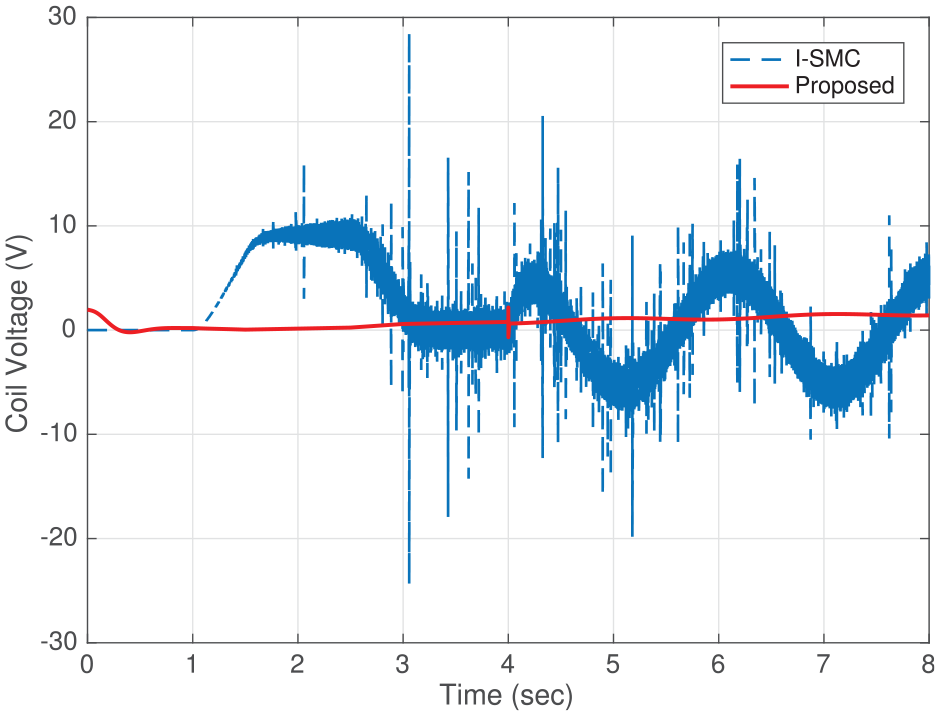
Control input
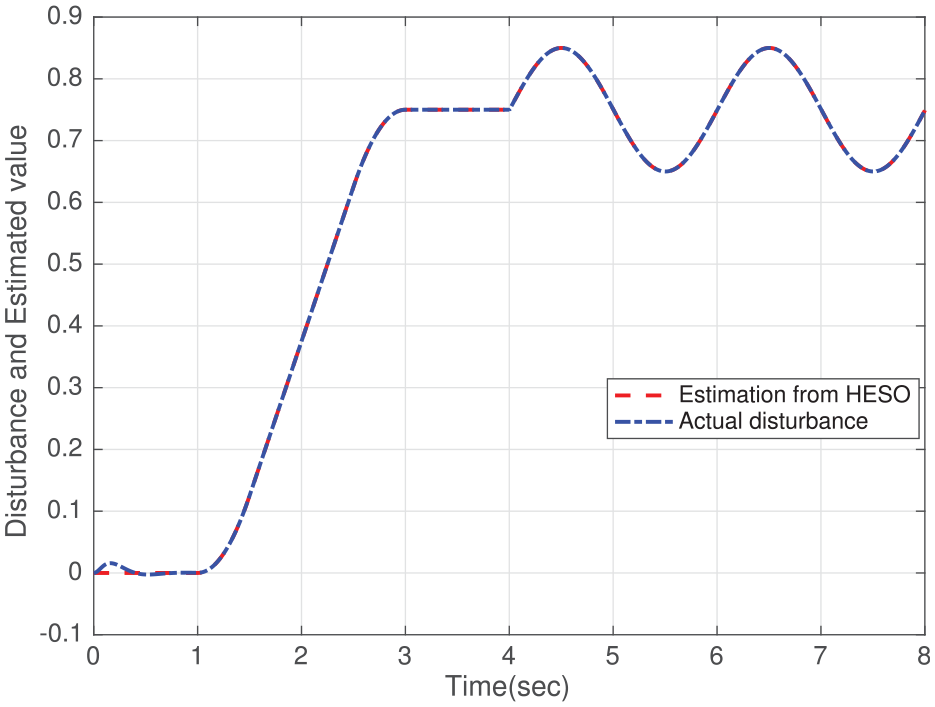
Actual and estimated disturbances by proposed observer.
Figures 6–8 represent the states of the system and clearly depict that the proposed control method has demonstrated the nominal performance recovery property. From Figure 6, it is evident that in presence of high-order time varying disturbances (after
Conclusions
This paper investigated both matched and mismatched disturbance attenuation problem for MCSs. A new HESO has been combined with second-order STC to handle the high-order disturbances consequences on the output in the finite time. The main contribution is to design an effective strategy which incorporates the estimations of non-vanishing disturbances whose bounds are not known a priori and compel the states onto the sliding surface and the output reaches to equilibrium in the finite time even under the influence of high-order mismatched disturbances. Simulation results of a EMS vehicle system have exhibited that the presented control method is better than I-SMC in terms of improved dynamics and better normal performance in the presence of exogenous disturbances.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.