
Abstract
The series manipulator of the demolition robot has different working postures and large self-weight so that the bearing mass of the joint hydraulic cylinder is a variable value, and the change of mass affects the dynamic characteristics of the valve-controlled hydraulic cylinder system. In this paper, an equivalent mass estimation method of the big-arm joint hydraulic cylinder is given, and the natural frequency range of the big-arm hydraulic cylinder-load system is calculated. In order to suppress the influence of the change of the natural frequency and external disturbance of the hydraulic cylinder on the system, the linear active disturbance rejection control is adopted in the closed-loop position control. The simulation results show that the change of load mass of the joint hydraulic cannot be ignored when designing the joint position controller of multi-joint hydraulic manipulator. And the simulation tests prove that the linear active disturbance rejection control strategy keeps good dynamic characteristic and steady-state accuracy for the change of natural frequency and external disturbance of hydraulic cylinder and has good tracking performance for periodic sinusoidal signal. Linear active disturbance rejection control is robust in the variable mass control of the manipulator and meets the requirements of the joint position control of the heavy-duty hydraulic manipulator.
Introduction
Because of its breaking and shearing functions in harsh and complex environment, demolition robot has been widely used in the fields of construction, metallurgy and rescue, and its working mechanism is heavy-duty hydraulic series manipulator. Each joint of the demolition manipulator is driven by electro-hydraulic proportional hydraulic cylinder system. The manipulator has different working postures and large working range and has larger self-weight. The load mass of the hydraulic cylinder will affect its natural frequency. When the manipulator is in different postures, the equivalent mass of the hydraulic cylinder loaded on the joint is changed. Li et al. 1 used finite element method to analyze the variable mass problem of hydraulic series manipulator. The change in mass makes the natural frequency of the hydraulic cylinder-load system become a variable parameter and affects the dynamic performance of the position control of the joint hydraulic cylinder. It is impossible to maintain a consistent control effect in its working range using general control methods. 2
Active disturbance rejection control (ADRC) is a control technology proposed by Professor Han Jingqing. In most of the control system design methods proposed by control theory, such as root locus technique, 3 pole assignment, 4 state feedback 5 and Lyapunov method,6,7 these methods are based on model paradigm and precise modeling without considering the influence of disturbance. Different from the above methods, ADRC is based on the disturbance rejection paradigm, which is an active control mode for disturbance and uncertainty suppression. The core of ADRC is to use extended state observer (ESO). According to the input and output signals of the object, the ESO is used to estimate and compensate the “internal and external” disturbances in real time. The disturbances include the summation of internal disturbance and external disturbance, thus suppressing the output error caused by disturbances.8–10 The ADRC is not required to accurately understand the dynamic characteristics of the controlled object (internal disturbance) or to measure the external disturbance, and all the disturbances can be suppressed at the same time. 11 Therefore, the ADRC has attracted extensive attention and research due to its strong engineering practicability and has been applied in power electronic, 12 motor control, 13 mobile robot, 14 wind power 15 and other fields.
However, the parameters of the complete ADRC are numerous and the adjustment is complex, which makes the engineering application more difficult. Aiming at this problem, Gao. 16 proposed a linear active disturbance rejection control (LADRC) design based on linear extended state observer (LESO). LESO realizes frequency band parameterization by configuring multiple roots. The remaining parameters are the static gain of the object and proportional–derivative (PD) control coefficients, Li et al 17 which greatly reduces the number of control parameters and has relatively clear physics.
Because LADRC has the characteristics of suppressing both internal and external disturbances, the change of natural frequency of joint hydraulic cylinder system is regarded as internal disturbance when the manipulator is in different postures. LADRC is used to suppress the influence of parameter change on joint hydraulic cylinder positioning control, so as to improve the robustness of joint hydraulic cylinder position control. In this paper, the variable mass control of manipulator based on LADRC is completed based on estimating the equivalent mass of big-arm hydraulic cylinder under different postures of manipulator.
Modeling of electro-hydraulic proportional valve-controlled hydraulic cylinder system for demolition manipulator joint
The demolition robot (Figure 1) is an electromechanical–hydraulic integrated system, which is generally composed of walking mechanism, rotary mechanism and manipulator. Different from general industrial robots, its working mechanism is a kind of multi-degree-of-freedom hydraulic heavy series manipulator, which is driven by hydraulic power element utilizes the hydraulic hammer to complete the breaking operation. In order to realize the precise positioning of the manipulator in its working plane, the position closed-loop control strategy is adopted in the joint hydraulic cylinder. The system consists of a proportional amplifier, a proportional directional control valve and a valve-controlled hydraulic cylinder (Figure 2). By controlling the amplifier to send a voltage control signal to the proportional directional flow valve, the proportional electromagnet drives the proportional valve core to move to control the hydraulic oil flow input to the hydraulic cylinder and make the hydraulic cylinder complete the corresponding displacement movement.18,19
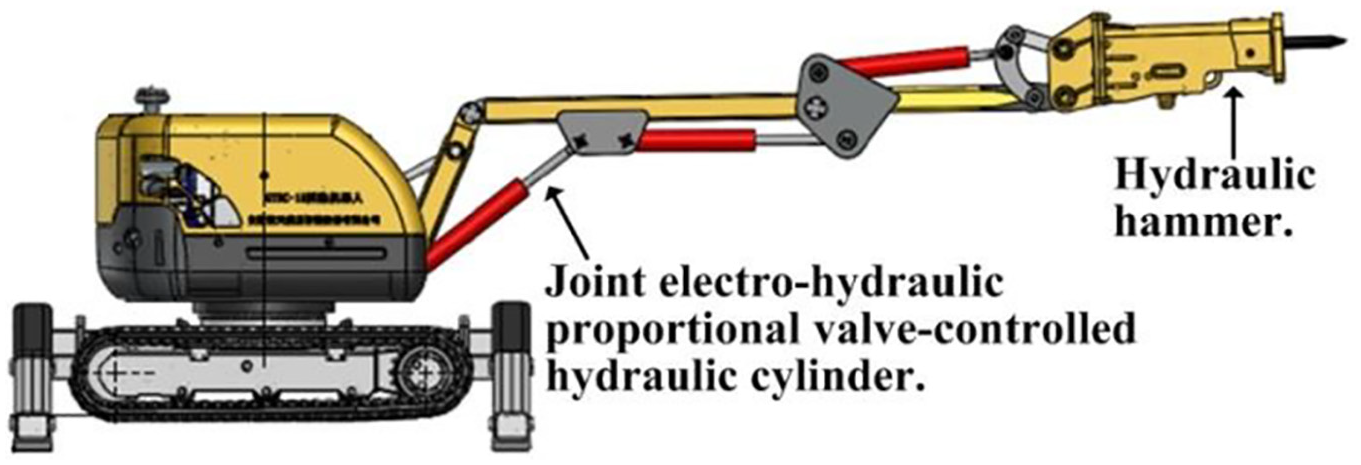
Demolition robot system.
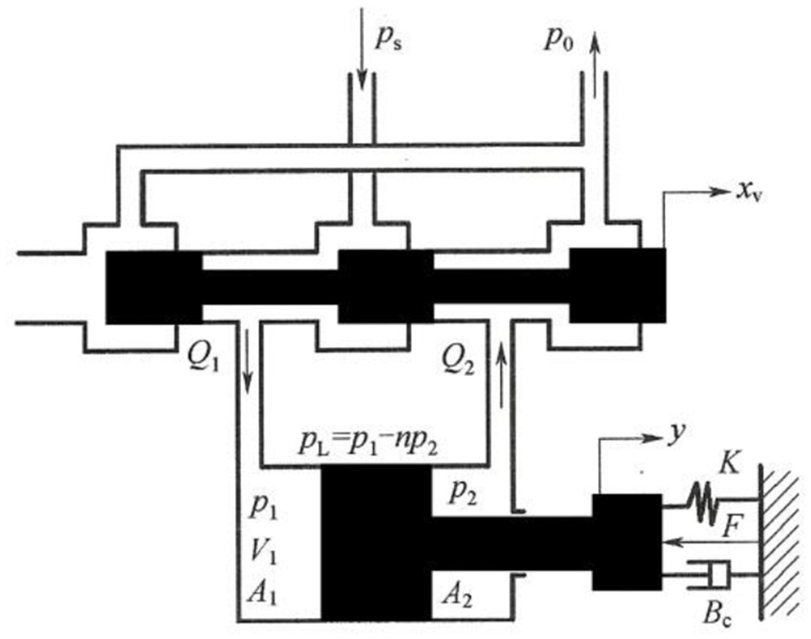
Valve-controlled hydraulic cylinder system.
The open-loop transfer function of electro-hydraulic proportional valve-controlled hydraulic cylinder with the demolition manipulator joint can be obtained as follows
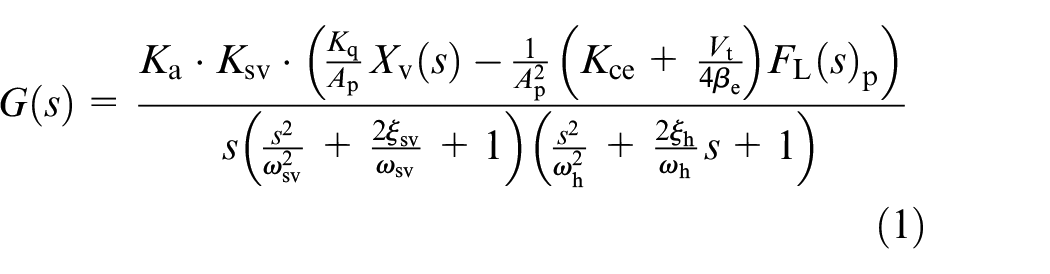
where
According to formula (1), the dynamic performance of the joint of the manipulator is mainly determined by the natural frequency
Calculation of equivalent mass and natural frequency of manipulator joint
The big-arm hydraulic cylinder of the 4-degree-of-freedom (DOF) demolition manipulator carries the big-arm, the two-arm, the three-arm and the demolition accessory at the same time, and its load mass is the biggest. Therefore, the big-arm hydraulic cylinder is taken as the research object to calculate the equivalent mass and natural frequency of the piston. It can be seen from Figure 3 that the big-arm rotates around the hinge point O1, and the two-arm, three-arm and the demolition accessory moves relative to their respective hinge points in the process of movement, and their movement direction relative to the cylinder body is not the direction of the piston. Therefore, the load mass Mt in the formula (1) cannot be considered simply as the mass of the moving body and the amount of change related to the posture of the working device.
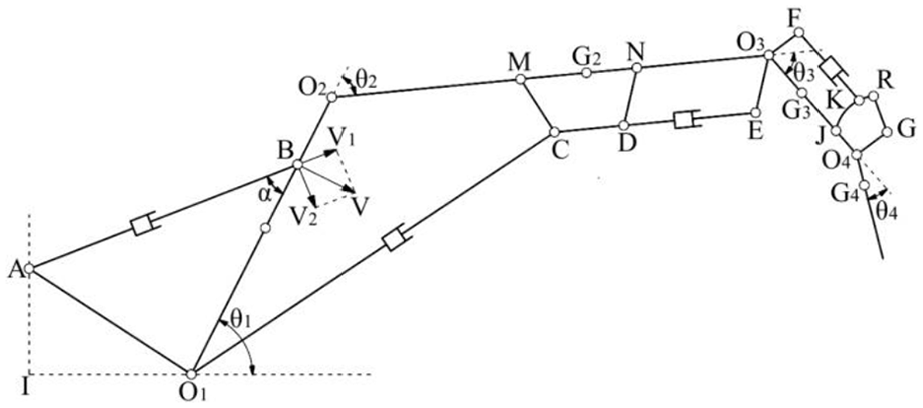
Schematic diagram of the working device of the demolition robot.
The structural schematic diagram of the working device of the demolition robot is shown in Figure 3. Suppose the angular velocity of the big-arm rotating around point O1, the linear velocity is V and the V direction is perpendicular to O1O2. The telescopic speed of the big-arm cylinder is V1, and the direction is along the AB. The rotation speed of the big-arm hydraulic cylinder around point A is V2 and perpendicular to AB.
Since the big-arm is a rigid body with planar motion rotating around O1, the kinetic energy at point B on the big-arm is

The kinetic energy of the big-arm hydraulic cylinder at point B is

The kinetic energy at point B is equal

The calculation formula of angular velocity is

Simultaneously, it is known from geometric relations that

The equivalent mass at B can be obtained by substituting formulas (5) and (6) into formula (4)

where MB is the equivalent mass of the big-arm.
J is the equivalent moment of inertia of the whole device around, which is known from the translation theorem of the moment of inertia 20

where m1–m4 is the mass of each arm; I1–I4 are the moment of inertia of each arm relative to its center of mass. G1–G4 is the center of mass of each arm.
In


The following formula is derived from formula (7), (9) and (10)

Formulas (8) and (11) show that the equivalent mass MB is directly related to the position and posture of the working device, and the corresponding equivalent mass is different with different postures. It is a variable parameter and should be estimated in the process of system control analysis.
From the simplification of formulas (8) and (11), it is obtained that MB is a function of θ1, θ2, θ3 and θ4, and let
Natural frequency of hydraulic cylinder of big-arm joint is obtained as follows

The load equivalent mass MB of the big-arm hydraulic cylinder is changed under different postures of the manipulator, resulting in a change value of the hydraulic-load natural frequency
Study on LADRC of manipulator joint
Aiming at the electro-hydraulic proportional position control system of demolition manipulator joint, the LESO and PD controller of LADRC are designed, and the simulation and comparative study of variable mass control of demolition manipulator is carried out.
The state equation of the fifth-order uncertain system
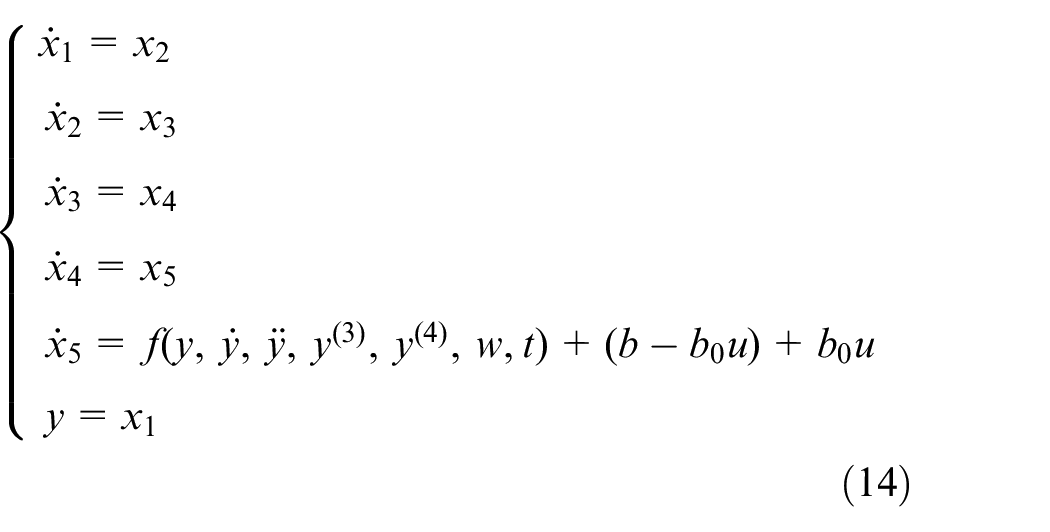
According to the open-loop transfer function formula (1) of the electro-hydraulic proportional valve-controlled hydraulic cylinder, the control object is a fifth-order continuous system, which can be expressed as an uncertain object under unknown disturbance (13)

where u is the control (input) variable, a portion of the control gain b is known (the known part is b0), y as the testable (output) variable,
Transform formula (13) into the form of state vector, as shown in formula (14)
LESO
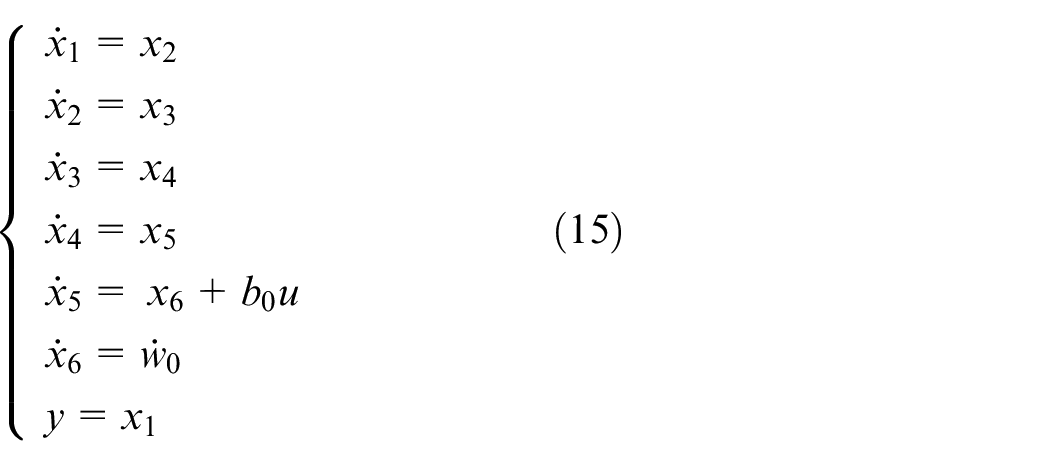
In order to suppress the influence of disturbance, LADRC needs to extend the total disturbance into a new state variable of the system and reconstruct (observe) the LESO containing the original state variable and disturbance of the system with the input and output of the system.
Let
The expanded sixth-order new system is shown in equation (15)
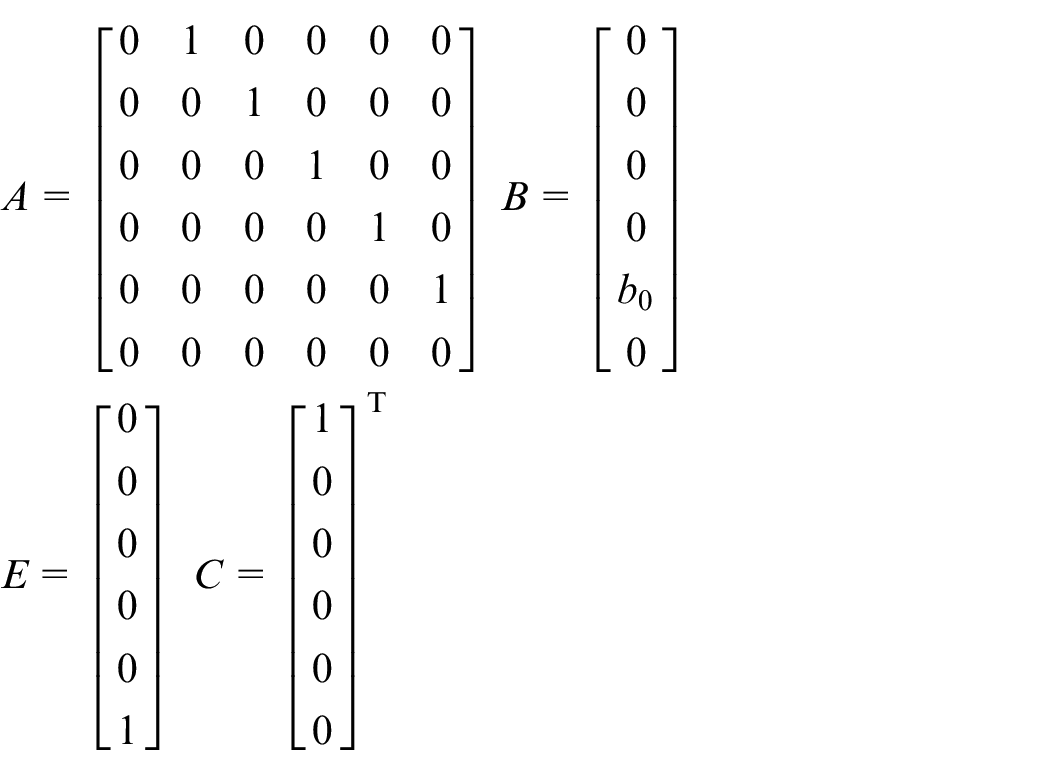
The state space of sixth-order new system can be described in the form of equation (16)

where A, B, E and C are as follows
In order to estimate the state of the system, it is necessary to construct the state observation vector Z, which is the estimator of X, see formula (17)

The continuous LESO corresponding to equation (16) is shown in equation (18)
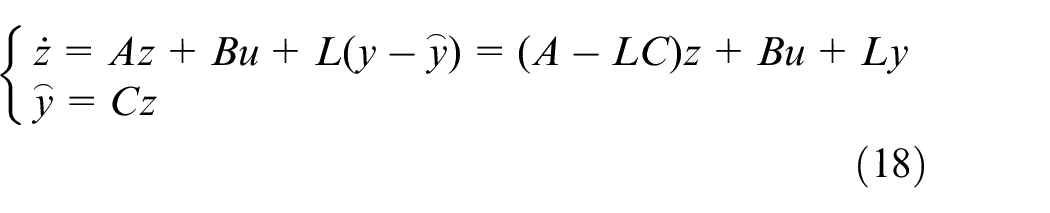
where the state vector Z is the estimated value of vector X and L is the observer error feedback gain matrix,
Gao
16
gives a method to determine LESO parameters using the concept of bandwidth. After parameterization, the poles of the characteristic equation can be placed in the same position (

where, I is the sixth-order identity matrix, and the observer gain matrix is uniquely related to the bandwidth of the observer. Based on equation (19), the parameter value of observer error feedback gain matrix L can be calculated and obtained as follows

PD feedback controller
The core idea of ADRC technology is to use ESO to estimate and compensate the total disturbance in real time. The process of compensating the original system into linear integrator series system is called dynamic compensation linearization. Through LESO, the extended state variable x6 (i.e.

By subtracting x6 (i.e. z6), the original object can be simplified into a series unit gain control problem. The control quantity u of the system is designed as follows

where adjustable parameter b0 is the compensation factor determining the compensation strength, and u0 is the virtual control quantity. By substituting equation (20) into equation (14), it can be seen that the control quantity u can transform the original system into an integral series system.
LADRC adopts the classical proportional–integral–derivative (PID) combination to implement the controller design. Since LESO can estimate and compensate the external and internal disturbance in real time, it does not need the integrator in traditional PID to eliminate the static difference under the constant disturbance. And the linear state error feedback (LSEF) control law is simplified to the design of PD combination.
The PD controller of a fifth-order continuous system is shown in equation (21), which outputs the virtual control quantity u0

where r is the given value of the system,
Since the selection of

where
The parameters of the controller gain matrix K are calculated as follows

Simulation of LADRC controller for demolition manipulator joint
The LADRC block diagram of the electro-hydraulic proportional valve-controlled hydraulic cylinder system of the big-arm joint is shown in Figure 4. The SIMULINK is used to conduct the simulation experiment of variable mass control of the joint hydraulic cylinder and to compare the control effect under different natural frequencies (
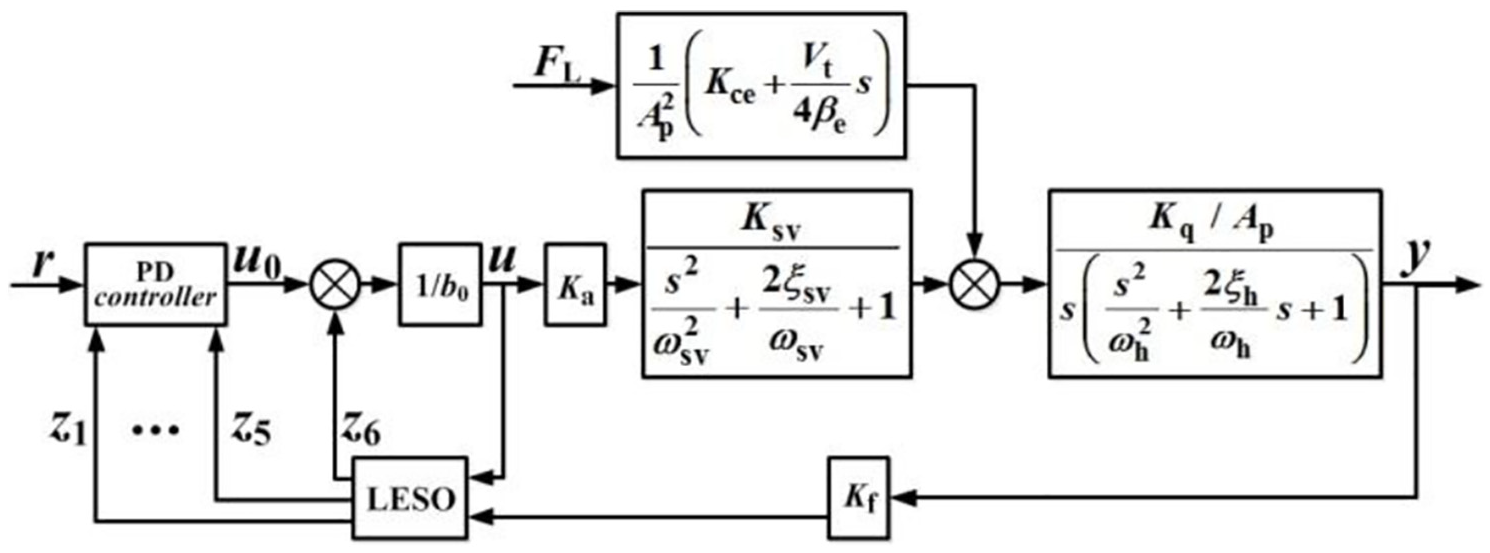
LADRC block diagram of demolition manipulator joint.
The parameters setting of LADRC only have three values of
Step response comparison
The natural frequency
Figure 5 shows that when the PID control mode is adopted, with the increase of the equivalent mass of the big-arm load, that is, when the natural frequency of hydraulic cylinder system decreases, the control quality of the step response also decreases, which is manifested as the oscillation increases gradually with the increase of the equivalent mass. By comparison with Figure 6, it can be seen that when the equivalent mass of the mass load of the big-arm is increased, the control quality of the step response basically does not change by adopting LADRC mode, and overshoot and oscillation are not generated, which shows that LADRC has a good ability to restrain the changes of internal parameters of the system. Compared with PID controller, LADRC has no significant change in the dynamic characteristics of its step response even if the load mass changes after the control parameters are set, and the control performance is consistent within the working range of the manipulator.
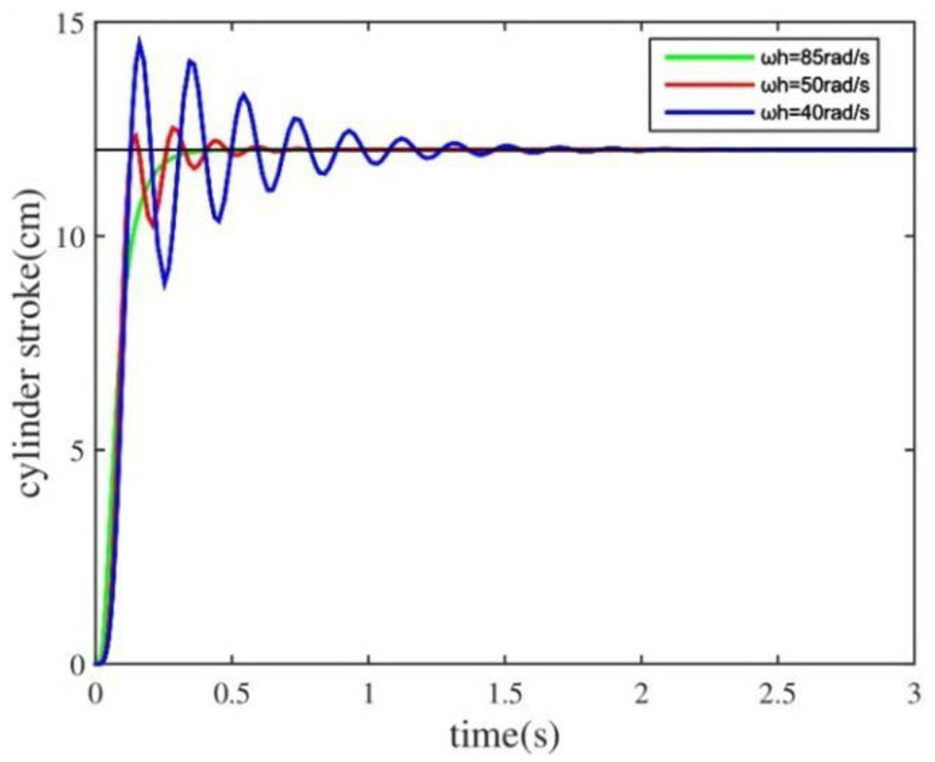
Step response of PID with different natural frequencies.
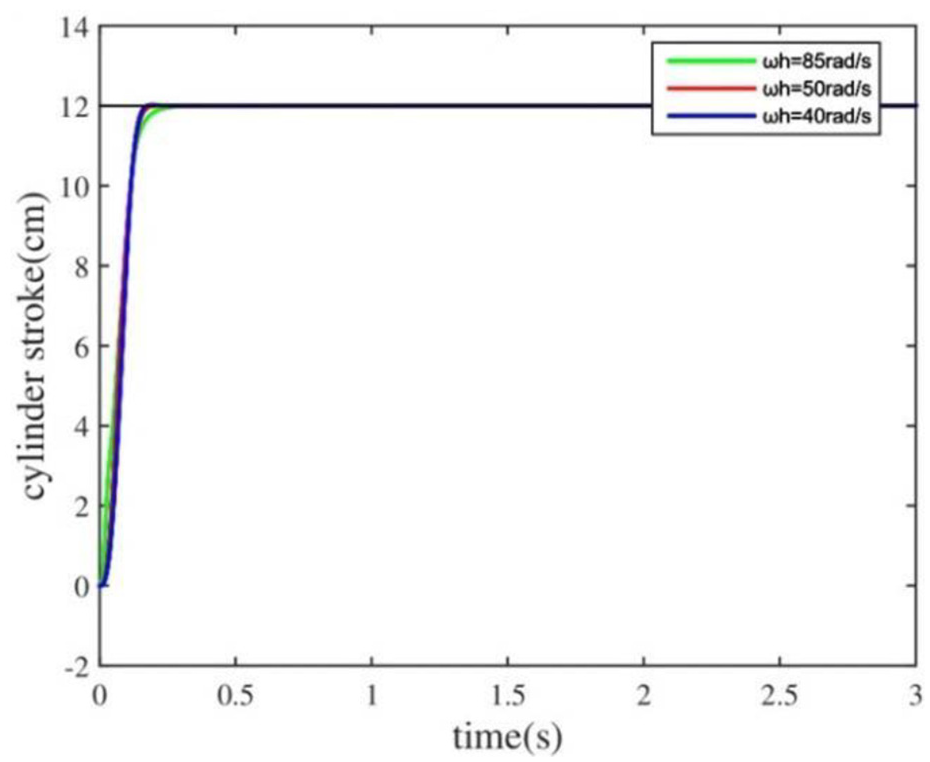
Step response of LADRC with different natural frequencies.
Comparison of external disturbance
The external disturbance of 3000 N is applied to the hydraulic cylinder system of the big-arm joint. The disturbance signal is a square wave signal with a time width of 1 s. When the big-arm valve-controlled hydraulic cylinder is at a large and small natural frequency (40 and 85 rad/s), respectively, the response of PID and LADRC strategies to external disturbance is compared.
As shown in Figure 7, when the equivalent mass is small (
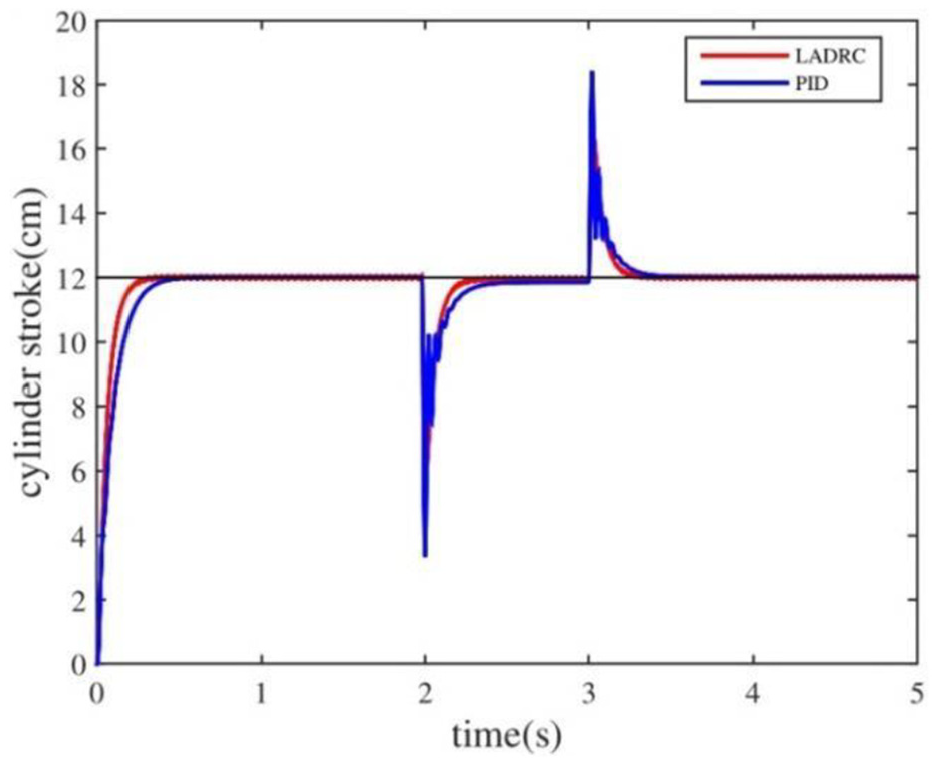
Comparison of external disturbance rejection at
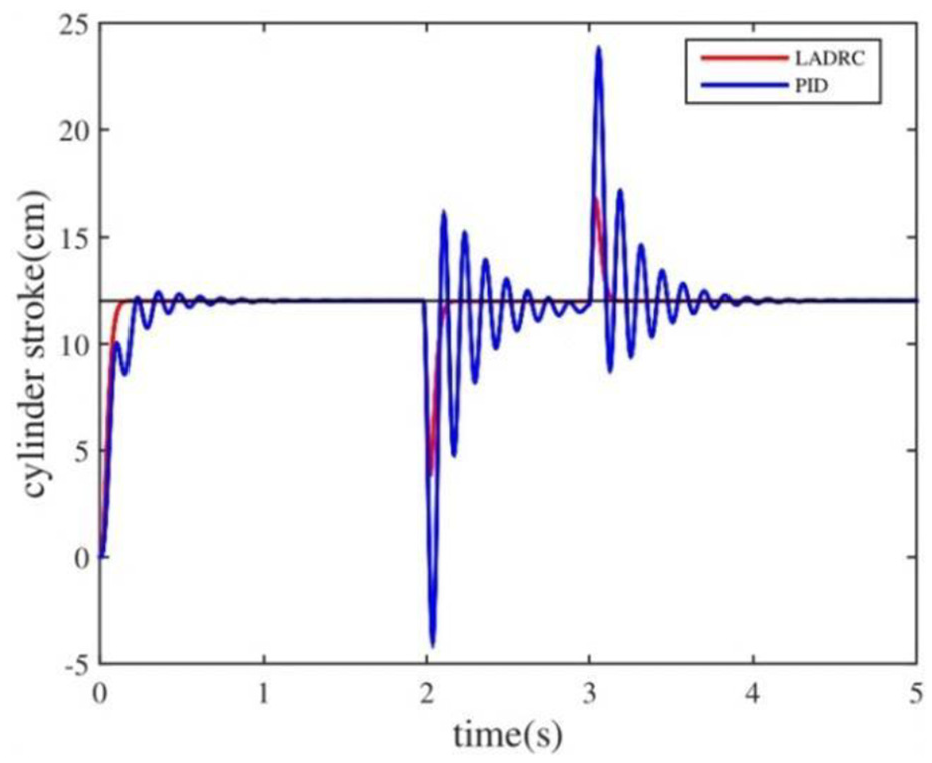
Comparison of external disturbance rejection at
Comparison of tracking performance of periodic signals
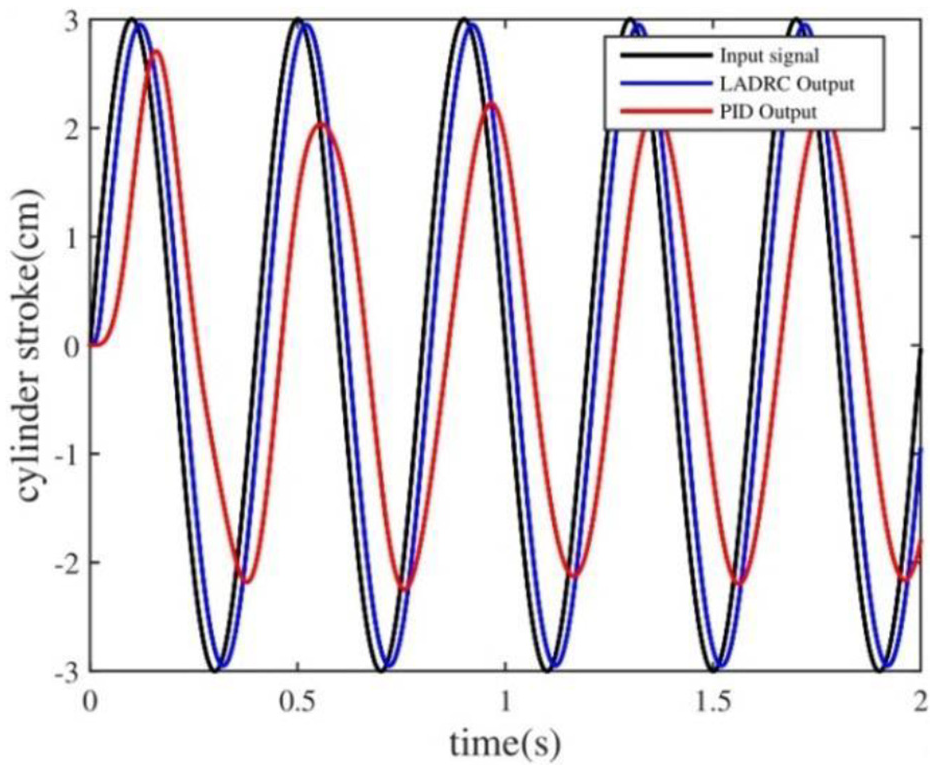
In the case of larger and smaller natural frequency of the big-arm hydraulic cylinder (40 and 85 rad/s), the position control system of the joint hydraulic cylinder is input with the sinusoidal periodic signals of 0.5 and 2.5 Hz, respectively, and the tracking performance of PID and LADRC strategies on different periodic signals under different load masses of the hydraulic cylinder is compared.
Compared with Figures 9 and 10, when inputting 0.5 Hz sinusoidal signal and hydraulic cylinder bearing smaller and bigger equivalent mass, respectively, the tracking signal of LADRC output has no amplitude attenuation and phase lag, while PID controller has certain amplitude attenuation and time lag. When the input signal is increased to 2.5 Hz sinusoidal signal (Figures 11 and 12), the PID controller has a large amplitude attenuation and phase lag when the hydraulic cylinder is subjected to smaller and bigger equivalent mass, respectively. In contrast, LADRC produces basically the same small attenuation and phase lag under the two load mass states. The above simulation results show that LADRC maintains consistent periodic signal tracking performance under different equivalent mass conditions, and the tracking performance is satisfactory.
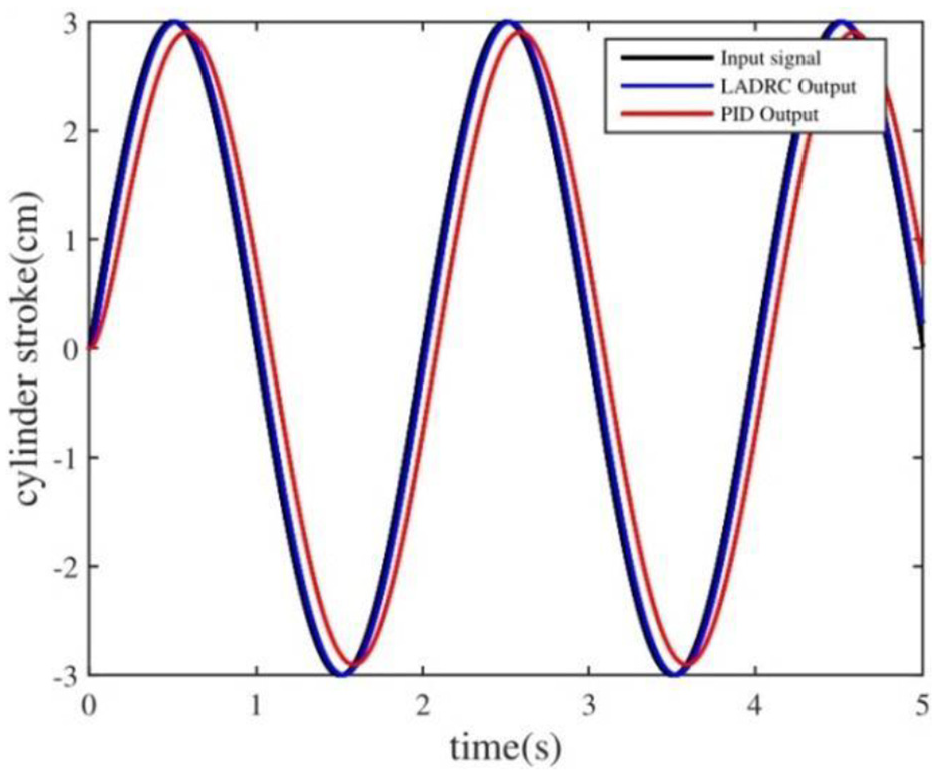
Tracking of 0.5 Hz sinusoidal signal when
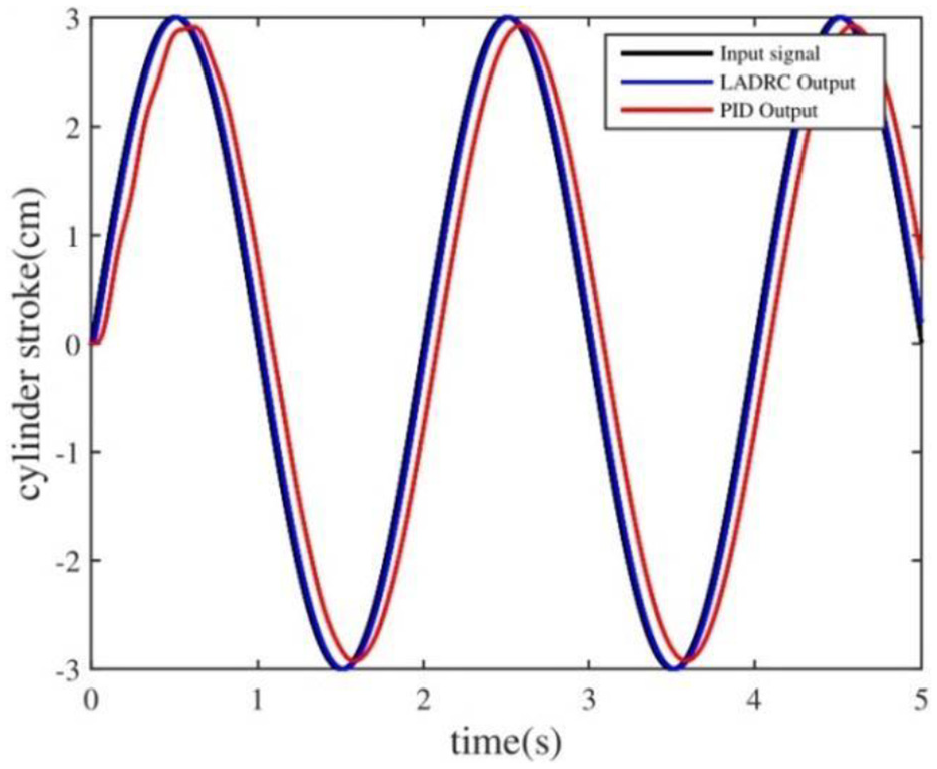
Tracking of 0.5 Hz sinusoidal signal when
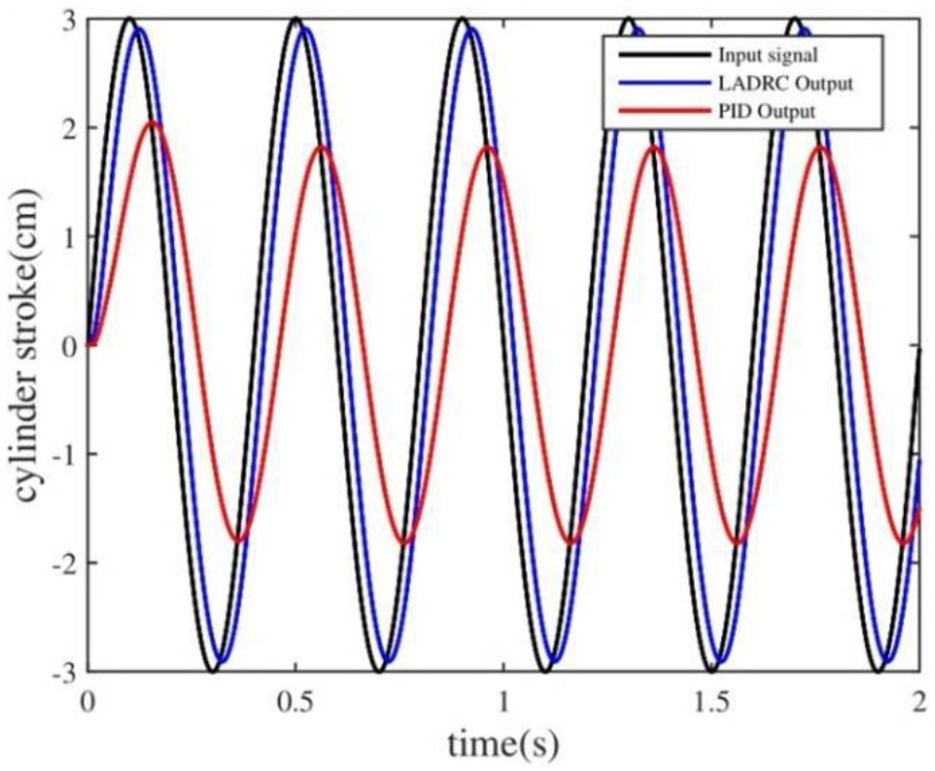
Tracking of 2.5 Hz sinusoidal signal when
Tracking of 2.5 Hz sinusoidal signal when
Conclusion
When the hydraulic heavy-duty series manipulator of the demolition robot is in different postures, the equivalent mass of the joint hydraulic cylinder loaded is changed, which changes the natural frequency of the valve-controlled hydraulic cylinder system, thus making the position control of the joint hydraulic cylinder of the manipulator becomes a variable parameter control problem.
Due to the change of the natural frequency of the valve-controlled hydraulic cylinder system when the manipulator is in different postures, with the increase of the equivalent mass, the dynamic characteristics of the step response of the PID controller, the disturbance rejection ability and the tracking performance of the periodic signal will be greatly reduced, which cannot meet the requirements of the control performance of the manipulator in its working range.
LADRC can suppress the output error caused by internal and external disturbances at the same time, so when the control parameters of LADRC are adjusted, the dynamic characteristics of step response, steady-state accuracy, disturbance rejection ability and tracking performance of periodic signals do not change when the equivalent mass of manipulator joint hydraulic cylinder is changed. In the working range of the manipulator, LADRC shows good control characteristics and robustness in the position control of the joint hydraulic cylinder, which provides an effective engineering method for solving the positioning control of the joint hydraulic cylinder of the hydraulic heavy-duty manipulator.
The hydraulic manipulator of the demolition robot has the characteristics of large inertia in the process of rotation. The effect of LADRC in the angle control of the demolition manipulator will be our next research content. In addition, due to the complexity of electromechanical–hydraulic system, the application research of LADRC in other electro-hydraulic control system is very valuable.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This research was supported by the National Key Technology Research and Development Program (2015BAK06B02)’ with funding ‘Science and Technology Major Project of Anhui Province (17030901037).