
Abstract
In this paper, the control of multiple ships for unknown scalar field source seeking problem with unknown external disturbances is considered. The sliding mode active disturbance rejection observers are designed first to converge to fixed multiple of the unknown external disturbances in finite time, respectively, and a least square method is adopted to estimate the gradient of the unknown scalar field at the position of the leading ship. Second, the surge, sway and angle velocity of the leading ship can converge to the virtual kinematic controllers through the input control of the dynamic controllers using force and torque in finite time. Third, the virtual controllers and dynamic controllers of the following ships are developed to urge the following ships to accomplish the source seeking problem from the perspective of dynamics. Finally, theoretical proofs and simulations are provided to prove the effectiveness of the strategy proposed.
Introduction
In the past few decades, large quantities of research works on source seeking have been done.1–4 In Li et al., 1 the authors have coped with the source seeking problem of an autonomous underwater vehicle (AUV) embedded with multiple sensors. The gradient estimation based on the specified sensors whose configuration designed as a semicircle is proposed and the controller making use of the estimated gradient eventually lead the AUV to the signal source. This search is characterized using the large number of sensors in special formation. In Yang et al., 2 a distributed stochastic source seeking algorithm is presented based on the method of stochastic extremum seeking. The measurements of the signal field at each vehicle, together with their relative distances are utilized to navigate all the vehicles to the signal source. The danger of the signal source is considered by some researchers 3 and a sliding mode controller is proposed to drive the robot to reach an area with a specified distance away from the signal source and afterwards the robot will stay in the region continuously. On the basis of a new sliding mode strategy, a control algorithm without gradient estimation is proposed, 4 which is simple in calculation and can seek the source with good performances. However, so far, there has been few research works relative to the source seeking of a pack of ships in spite of the fact that the control of ships is of great significance especially in the stability and impact strength of various ships in some important occasions.
As for the control of ships, there exists lots of research works on the underactuated ships5–7 together with full-actuated ships8,9 with respect to tracking and control. In Demg et al., 5 an adaptive bounded term is added to distribute the errors into actuated motion and the fuzzy logic system is employed to estimate the uncertainties adopting the methodology of robust damping. And with the help of Gauss error function, the underactuated ship’s trajectory can converge to the desired one. In Pettersen and Nijmeijer, 6 a coordinate transformation first proposed by Pettersen and Egeland (1996) with a dynamic function considered additionally is developed, and with the assist of averaging method, a unique technique involved in feedback control law is given to realize the stabilization and tracking problem. Input and velocity are considered restricted and kinematic along with dynamic functions are studied together with the help of backstepping method, 7 and using the dynamic surface control method, the global tracking control problem is then accomplished. Differing from the underactuated ships, full-actuated ship’s research is relatively not that difficult. Similar to Chwa, 7 dynamic surface control is adopted to avoid the traditional “explosion of complexity” problem 8 and based on the minimal learning parameterization, the measurable propeller is selected as the control inputs with the uncertainty estimated by radial-basis-function neural network. In another paper, 9 with external disturbances and without velocity measurement, a finite-time control law is developed with the velocity and disturbances measured by finite-time observer approximately to lead the ship to the desired direction and position.
Viewing research works about the source seeking of ships,3–9 most of the controllers designed to solve the source seeking problem are kinematic ones, which cannot meet the stability demands in some cases influenced by external disturbances and are not that realistic to some extent to be taken as control inputs compared with dynamic controllers using torque and force as control inputs. Besides, the signal source can be hazardous sometimes and it is not appropriate to lead the ships to the signal source directly.
For the sliding mode active disturbance rejection control (ADRC), Li et al.
10
proposed an ADRC method based on output prediction using the principle of smith predictor to resist the negative effects originating from the phase hysteresis to cope with the multi-variable systems with the structural vibration as an example. In Li and Li,
11
consider the internal and external disturbances in wind energy conversion systems (WECS) and put forward a predictive active disturbance rejection control (PADRC) strategy for a direct-driven permanent magnet synchronous generator (PMSG)-based WECS to maximize the wind power extraction. Ding et al.
12
construct a new barrier Lyapunov function and adopt the technique of adding a power integrator to develop a novel second-order sliding mode (SOSM) control algorithm which enables the output variable to keep in the boundary of the constraint region, thus finishing the output constraint problem successfully. Mei and Ding
13
propose a Lyapunov-based SOSM controller with a power integrator technique to stabilize the sliding variables and develop a novel SOSM controller with a saturation level with the local SOSM controller combined. In Li et al.,
14
put forward a maximum power point tracking strategy based on model predictive controller (MPC) to track the maximum power in a direct-driven PMSG-based WECS with the disturbances and uncertainties observed by the extended state observer (ESO). Huang el al.
15
constructed an
Chen et al. 16 compared the ADRC method with other disturbance-observer-based control methods and presented their applications in industrial sections and future directions. Zheng et al., 17 combined an adaptive feedforward mechanism using an inverse plant model with the ADRC method to guarantee fast tracking performance with low bandwidth, which can receive ideal inverse model given appropriate initial conditions.
This paper provides the adaptive controllers of multiple full-actuated ships from the perspective of dynamic level. By virtue of the gradient estimation in Zhu et al., 18 we have had a new understanding of the least square method and it is made good use of to estimate the gradient. Unlike common control methods, this paper focus on utilizing force and torque instead of the constraints on motion as control inputs directly, enabling the system to earn better robustness despite of the external disturbances since the uncertainty can be diminished by the actual force or torque given. Moreover, we take advantage of the sliding mode disturbance observers to estimate the unknown disturbances in finite time and the Lyapunov stability theorem is employed to testify that the kinematic parameters can converge to the virtual controller asymptotically. Based on the virtual controller designed, 19 the system tracking error will converge to zero asymptotically at last. In addition, owing to Zhu et al., 18 the kinematic controllers of their research are adopted as our virtual controllers for the dynamic feedback system. The main innovations and contributions of our research can be summarized as the following perspectives:
The gradient of the unknown scalar field at the position of the leading ship is estimated with the aid of least square method under the circumstance that each ship can only measure the scalar field value of its own position.
The source seeking errors of the leader–follower system converge to zero asymptotically with time growing to positive infinity based on the proposed virtual controllers while the disturbance observers converge to fixed multiple of the unknown external disturbances in finite time by the sliding mode control.
The rigorous mathematical deduction and proof affirm the reliability of the control laws proposed in this paper. Further simulation results additionally demonstrate the effectiveness and stability of the control law.
This paper concentrates on research works on full-actuated ships whose control can be studied more comprehensively and considerately compared with underactuated ships and the control problem can be solved more perfectly and easily.
This paper is organized as follows. In section “Problem statement,” the formalization of the source seeking problem considered is given. Section “Main results” presents our main results including gradient estimation, controller design and stability analysis. Simulation results are provided and relative analysis is given in section “Simulation.” Finally, the conclusions are announced in section “Conclusion.”
Problem statement
In this paper, we adopt a nonlinear ship model with six degrees of freedom which can be studied from surge, sway and yaw control, respectively. The kinematic model of the ith ship is given as follows

As is shown in Figure 1,
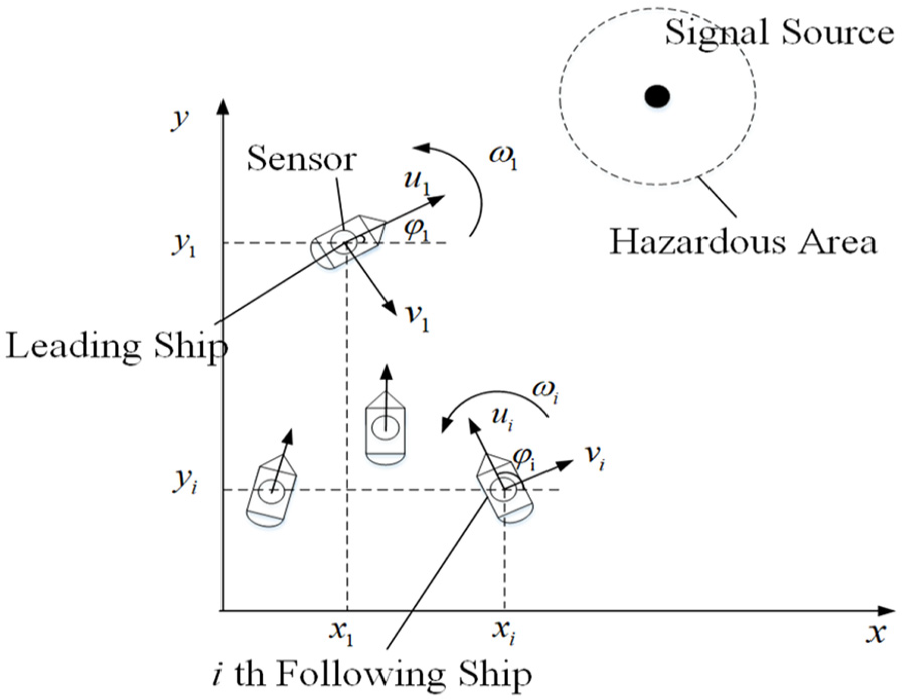
The model of the full-actuated ships.
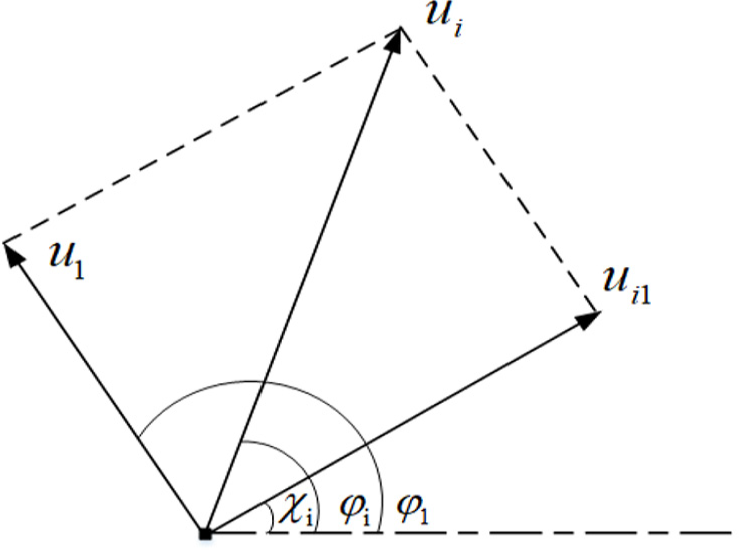
Relative surge velocity and actual surge velocity.
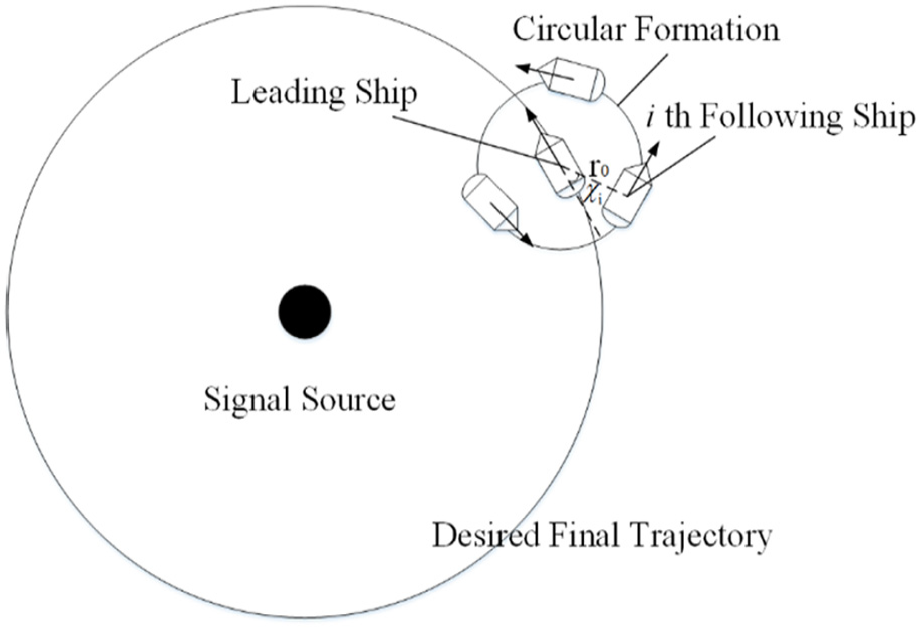
Desired trajectory and circular formation.
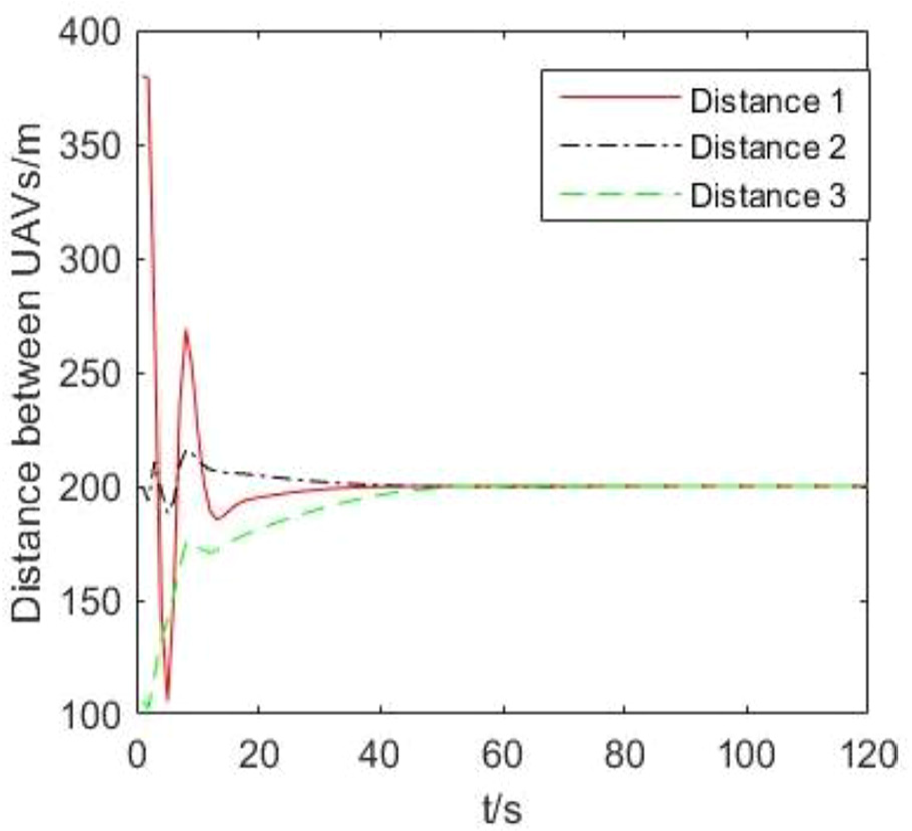
Distance between the leading ship and each following ship.
And the dynamic model of the ith ship is described as
where parameters
Here, we assume that the source center

where
In this paper, our control task is to enable all ships to finish the source seeking problem which is to reach an area with a safe distance from the signal source and construct a specified leader–follower formation with external disturbances considered.
Main results
In this section, we will present how all ships reach an area with a safe distance from the signal source. We will start this by giving some lemmas and assumptions.
Lemma 1
Consider the first-order system
Lemma 2
Consider a continuous positive definite function
where
Assumption 1
Each ship is equipped with a sensor at the center which cannot measure the position and relevant parameters of the signal source directly.
Assumption 2
The scalar value of the source center is the strongest and it declines as the distance farther away.
Assumption 3
Each ship can get the position and velocity of the leading ship and the leading ship can get the position and the measurement of the scalar filed value of all following ships.
To finish the source seeking problem of the leading ship, we take this assumption as a premise to utilize the least square method mentioned in section “Estimation of the gradient of the leading ship,” or we will be restrained by the gradient estimation.
Considering system equations (1) and (2), the sliding mode surface of disturbances can be designed as

where
where parameters
The sliding mode disturbance observers
By combining equations (2), (4), (5), (7), we can get
Similarly, it can be obtained that
Theorem 1
Considering system equations (1), (2), sliding mode surfaces equation (4), sliding mode disturbance observers equation (7), the sliding mode disturbance observers
Proof
Consider the Lyapunov function

Substituting equations (1)–(4) into the derivative of equation (10) with respect to time and it can be obtained
In the same way, we can get that
According to equations (7) and (12), it can be obtained
Based on Lemma 2 and inequality equation (13), we can conclude that the sliding mode disturbance surface can converge to zero in finite time. Considering equation (9) and it is obvious that the sliding mode disturbance observers can converge to fixed multiple of the unknown external disturbances in finite time. This completes the proof.
Estimation of the gradient of the leading ship
By system equation (1), we can get the position of the ith ship
Make a difference between the field value of all the following ships and that of the leading ship and it can be obtained
For the sake of simplifying the following description, we define that

Based on equations (15)–(18), we can get that

To estimate

where
Based on the estimation of the gradient, the virtual controllers of the leading ship
Controller design of the leading ship
In this sub-section, virtual controllers for the leading ship are proposed to finish the source seeking task, and then the dynamic controllers for the leading ship are given to make the kinematic parameters converge to the virtual controllers.
Theorem 2
The virtual controllers of the leading ship are given as follows

where

where
Proof
Take a Lyapunov function
where
We can easily know that
Take a Lyapunov function
We can conclude from equation (24) and Assumption 2 that
We define controller error system as24–26

The derivatives of
Substitute equation (2) into equation (26) and we can get
The derivatives of leading ship’s virtual controllers equation (2) with respect of time are
We design the dynamic controllers as follows
where constants
Theorem 3
Considering the closed-loop controller error system equation (25) and dynamic controllers equation (29), based on Lemma 1, the controller error system will converge to zero in finite time, thus making
Proof
Substituting equation (29) into the error system equation (27), it can be obtained that
In the same measure, we get
To simplify the analysis, we take the equation (31) as an example to indicate our conclusion. Set Lyapunov stability function
Equation (32) can be rewritten as

Integrating both sides of the equation, we can get that
Finally, after some transformation, we can get

Apparently,
Controller design of the following ships
In this sub-section, virtual controllers for the following ships are proposed directly or indirectly(equivalent transformation) to enable following ships to finally move to the small annulus of the safe distance from the signal source and be in a dynamic circular formation and then dynamic controllers
For all the following ships, the relative position of whom with the leading ship can be described as27–30

To facilitate the solving progress, we first give two of the virtual controllers

where
Only under the circumstances that
In this case, the derivative of the relative position can be given as

To simplify the relative dynamics,

where
Differentiating
Combining system equation (1), controllers equation (21) and equation (37), we can get

According to
After some transformation, equation (42) can be rewritten as

Based on equation (43), we can easily know that
Theorem 4
With the help of the transformation given in equation (43), the virtual controllers are proposed as follows which can enable the following ships to be distributed on the dynamic circle with the leading ship as the center
where
Proof
To realize the goal, we first let all the following ships to move around a specified point
The dynamic point

Considering Lyapunov stability function

The derivative of
Based on the virtual controllers mentioned in equation (44), here, we directly substitute
It is clear that
Above indicates that the virtual controllers
Differentiating equation (43) with respect of time, it can be obtained that
In order to finish the control task and based on equation (50), we give
The dynamic controllers
Substituting equation (51) into the error system equation (25), it can be obtained that
According to Theorem 3, we can finally conclude that the kinematic parameters
Simulation
In this section, the source seeking method with virtual controllers will be proved by the MATLAB simulation results in the case of the multiple ships with external disturbances. We use four ships including one leading ship and three following ships for simulation, the initial position of the leading ship is
And the scalar field

And the sliding mode disturbance observers
The simulation results are shown as follows. It can be observed from Figure 5 that following ships converge to the circular orbit with a desired distance to the leading ship, as claimed in Theorem 4. Figure 5 shows the Lyapunov function
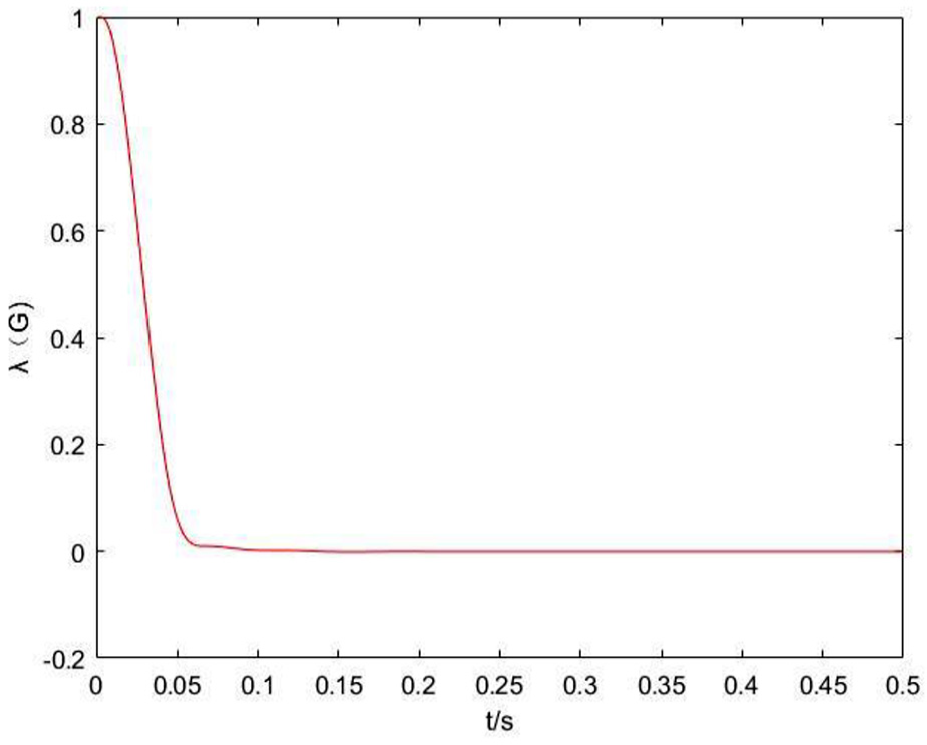
The tendency of the Lyapunov function equation (10).
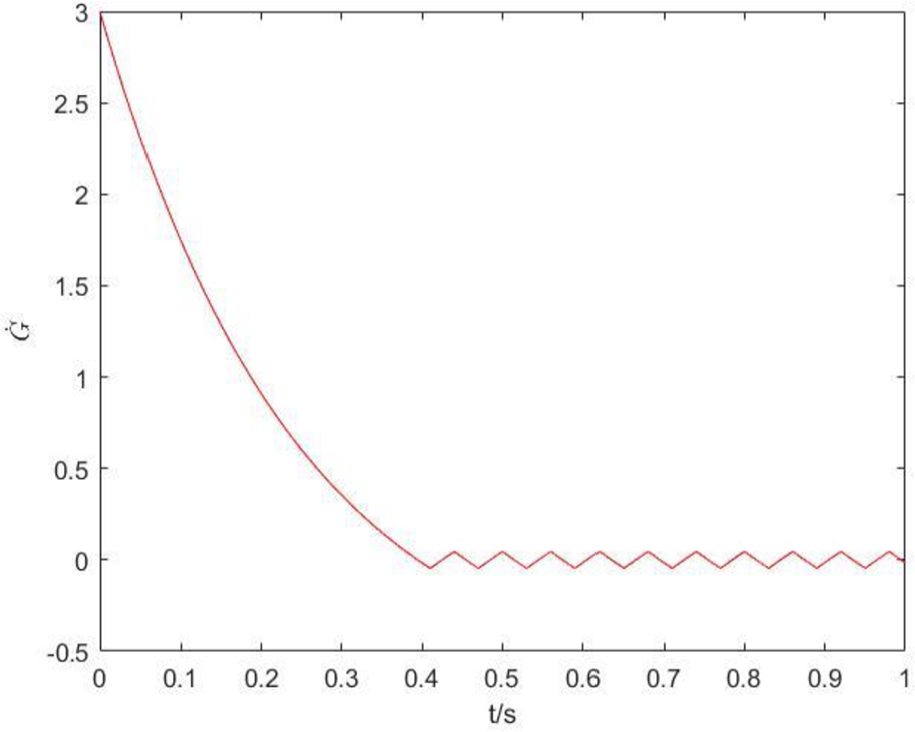
The error with observer and disturbance signal.
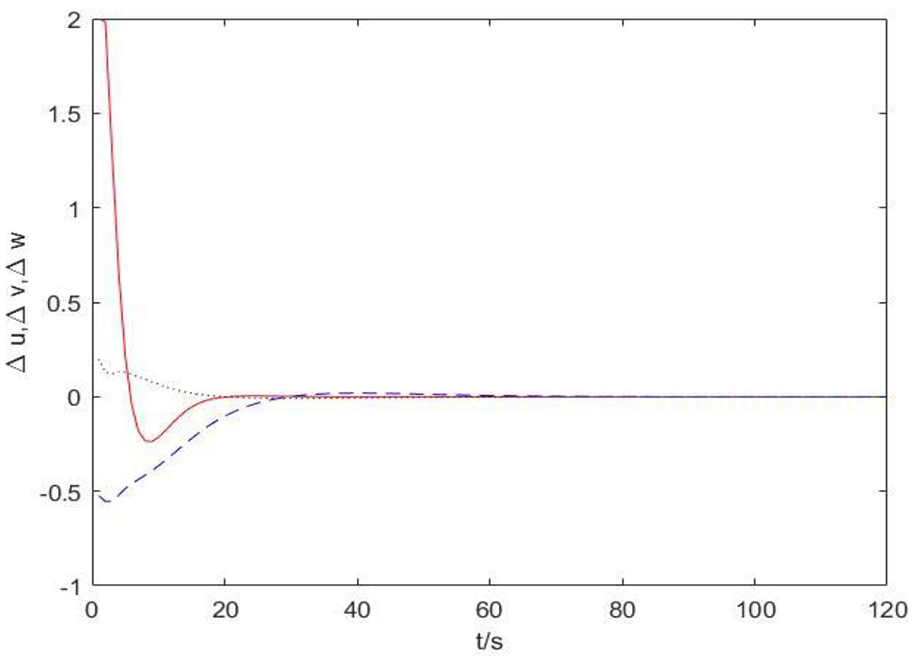
The controller error system.
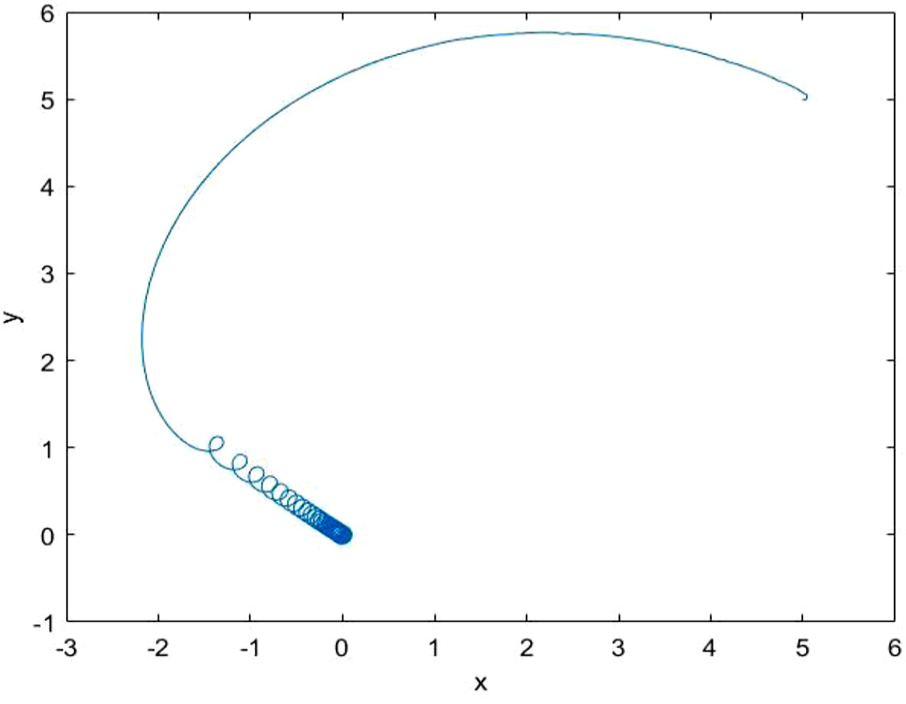
Trajectory of the leading ship.
Conclusion
This paper studies the problem of the source seeking of the leader–follower formation control of the full-actuated ships. Based on the least square method, a gradient estimation method is proposed to measure the gradient of the scalar field at the position of the leading ship. Virtual controllers are designed as force or torque inputs and the surge, yaw and angle velocity can converge to the virtual controllers in finite time with the help of them. In addition, the virtual controllers can ensure that the system tracking errors will converge to zero in finite time, thus making the source seeking successfully.
The source seeking of the underactuated ships, which is more complicated since the uncertain degree, that is, the sway velocity have to be dealt with from the perspective of the dynamic function which is controlled by the surge and yaw velocity indirectly, thus making the construction of the dynamic controllers which control the kinematic parameters directly difficult. Consequently, in the coming time, we will further consider the source seeking of the underactuated ships.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.