
Abstract
The paper studies the control problem for nonlinear uncertain systems with the situation that only the current reference signal is available. By constructing a memory structure to save the previous reference signals, a novel error-based active disturbance rejection control with an approximation for the second-order derivative of reference signal is proposed. The transient performance of the proposed method is rigorously studied, which implies the high consistence of the closed-loop system. More importantly, to attain the satisfactory tracking performance, the necessary condition for nominal control input gain is quantitatively investigated. Furthermore, the superiority of the proposed method is illuminated by contrastively evaluating the sizes of the total disturbance and its derivative. The proposed method can alleviate the burden of the estimation and compensation for total disturbance. Finally, the experiment for a manipulator platform shows the effectiveness of the proposed method.
Introduction
Uncertainties, including external disturbances, unmodeled nonlinear dynamics and parametric perturbations, are ubiquitous in industrial process. In control science and technology, it is a centering issue to design a controller featured with strong capability of handling uncertainties. Among various substantially developed control methods, uncertainty estimation and compensation-based methods show the powerful capability of tackling uncertainties and the simplicity of practical implementation, including but not limited to disturbance observer–based control,1–3 uncertainty and disturbance estimator–based control, 4 unknown input observer–based control,5,6 and active disturbance rejection control (ADRC).7,8
ADRC is innovatively proposed by Jingqing Han, 7 which is featured with two-degree-of-freedom (2-DOF) design. More specifically, the extended state observer (ESO) is proposed to actively estimate the total disturbance and the derivatives of controlled output. Based on the online estimation from ESO, the controller composed of compensation for the total disturbance and stabilizing of the nominal system is constructed. Due to the effectiveness 2-DOF design, ADRC has been successfully applied to many practical systems, including aerospace systems,9–11 motion control systems,12–15 energy systems,16–19 and robotic systems. 20 In engineering practice, the closed-loop performance of ADRC design is featured with strong robustness to uncertainties and simplicity in implementation. Moreover, the theoretical analysis of ADRC has been substantially established by a series of studies.21–25 The studies by Guo and Zhao 21 and Zhao and Guo 22 rigorously prove the convergence of nonlinear ESO and nonlinear ADRC design. For discontinuous disturbances and unknown nonlinearity, the literature 23 theoretically investigates that ADRC has strong capability of tackling various uncertainties. The studies24,25 demonstrate that ADRC can deal with mismatched uncertainties via the compensation for the total disturbance. Based on the successful development of ADRC in both practical and theoretical aspects, ADRC has drawn amounts of attentions from both industrial and academic communities.
Motivated by different practical problems, several effective modified ADRC designs are proposed. To reduce the effect of measurement noise, the combination of ADRC design and Kalman filter algorithm is successfully applied to gasoline engine systems. 18 To deal with the input and output delays in control systems, some efficient modifications of ADRC are proposed, including Smith predictor–based ADRC, 26 matched delay design in ESO,27,28 and predictor observer–based ADRC. 29
In the conventional design of ADRC, 8 the reference signal and its derivatives are assumed to be known before control design. However, in numerous practical systems, only the reference signal at the current time is available, since there is a decision loop calculating the reference signal instantly beyond the low-level control loop.17,30 Motivated by this problem, an error-based ADRC design is innovatively proposed and successfully applied in DC–DC buck converter. 31 Moreover, the literature 32 shows that error-based ADRC has strong capability of handling harmonic disturbances. However, the existing stability analysis for error-based ADRC is based on the assumption that the initial estimation error is sufficiently small,31,32 which might not be satisfied in practice. It is in urgent need to establish the rigorous stability theory for error-based ADRC. Furthermore, it is a significant issue to develop a more effective error-based ADRC for practical process.
In this paper, by establishing a memory structure for the previous reference signals, a novel error-based ADRC with an approximation for the second-order derivative of reference signal is proposed. Furthermore, the theoretical analyses, including the transient performance, the necessary condition for nominal control input gain, and the superiority of the proposed memory structure, are comprehensively presented. The experiment of a manipulator platform illustrates the effectiveness of the proposed ADRC. The main contributions of the paper are shown as follows.
For the situation that only the current reference signal is available, a novel error-based ADRC with a memory structure to approximate the second-order derivative of reference signal is proposed. The proposed approximation value for the second-order derivative of reference signal is continuous, which can reduce the bump of control input.
With general assumptions for uncertainties and initial values, the transient performance of the proposed ADRC based closed-loop system is rigorously studied. More importantly, the necessary condition for the nominal control input gain is quantitatively analyzed.
Compared with the existing error-based ADRC, the sizes of total disturbance and its derivatives in the proposed ADRC are proved to be smaller, which alleviates the estimating burden of ESO.
The rest of the paper has the following organization. In “Problem formulation” section, the problem formulation is presented. The error-based ADRC with memory structure is proposed in “Error-based ADRC with memory structure” section. The theoretical analysis for the proposed ADRC is given in “Theoretical analysis” section. “Experimental verification” section shows the experimental results. The conclusion is presented in “Conclusion” section.
Problem formulation
Consider the following second-order nonlinear uncertain systems

where

for
The system (1) can model a vast of practical systems, including flight systems, robotic systems, and vehicle systems. Furthermore, the control objective of the system (1) is to design the control input
The reference signal is often generated by a decision-making scheme in practical systems, such as robotic systems, 30 flight systems, 33 and energy systems. 17 As a result, only the instant reference signal is available for the low-level control loop. Moreover, the derivatives of the reference signal are definitely unknown. However, in the conventional ADRC, 8 the derivatives of reference signal are assumed to be known. It is significant to properly modify ADRC scheme based on the limited information of reference signal.
Based on the reference signal at the current time, a modified ADRC for a large scope of nonlinear uncertainty
Error-based ADRC with memory structure
Due to the measured output and reference signal at current time, the current tracking error

is available. Combined with the system (1) and the nominal control input term

where
In the practical implementation of the existing error-based ADRC,31,32 only the sampled reference signal
In the paper, an approximation for
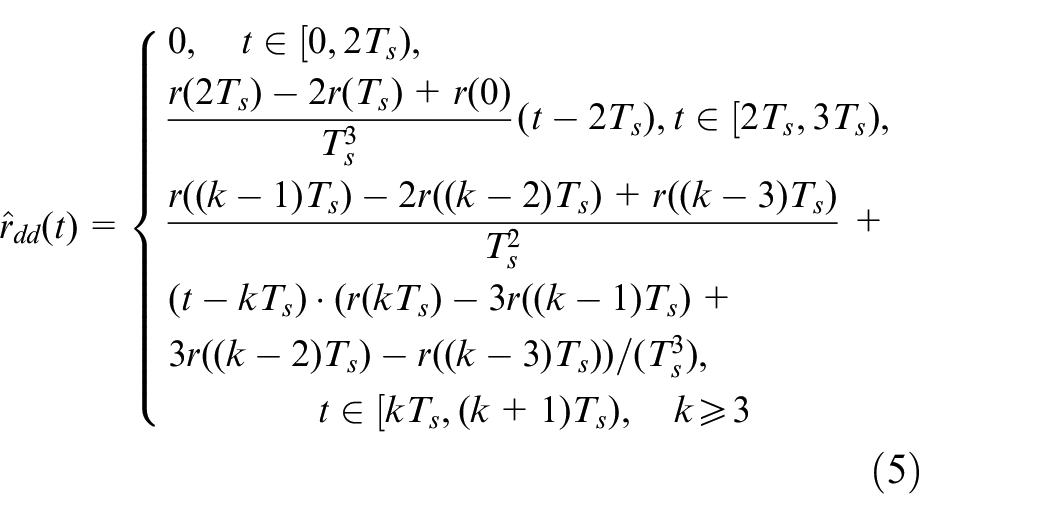
The supplementary definition of

The detailed analysis for the approximation (5) is presented in Lemma 1 in the appendix. From the perspective of implementation, the main difference with the existing error-based ADRC is that an additional memory structure for saving
With the approximated value

where the total disturbance

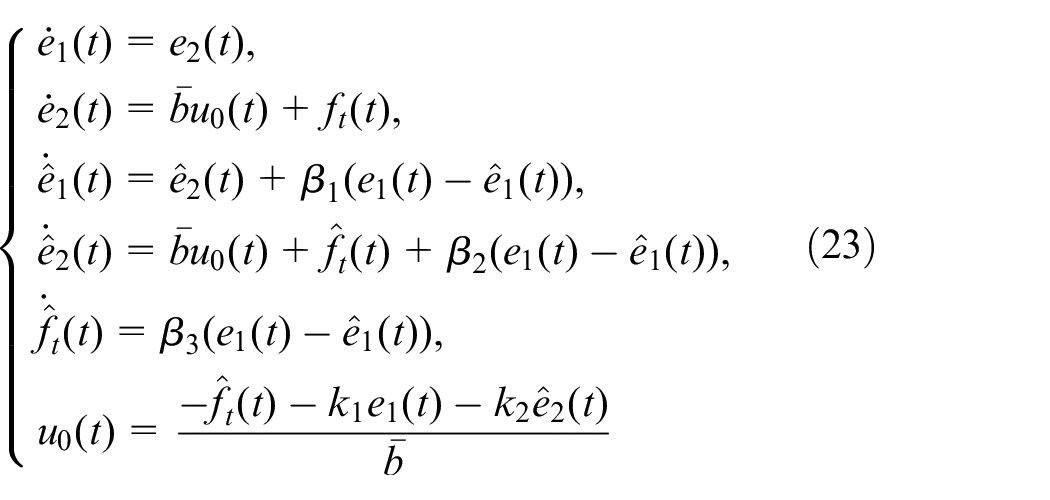
From the above analysis, the tracking problem of the system (1) is transformed into the stabilization problem of the error system (6). Next, an ADRC design is presented.
To online estimate the total disturbance, the following ESO is presented
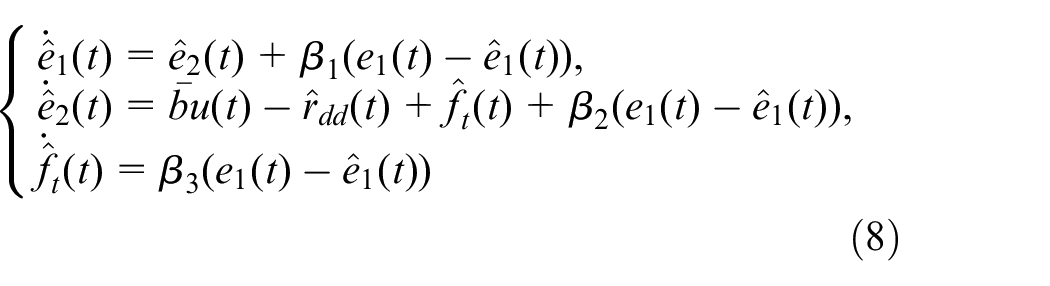
where

Based on the approximation (5) and the estimation from the ESO (8), the ADRC input is designed as follows
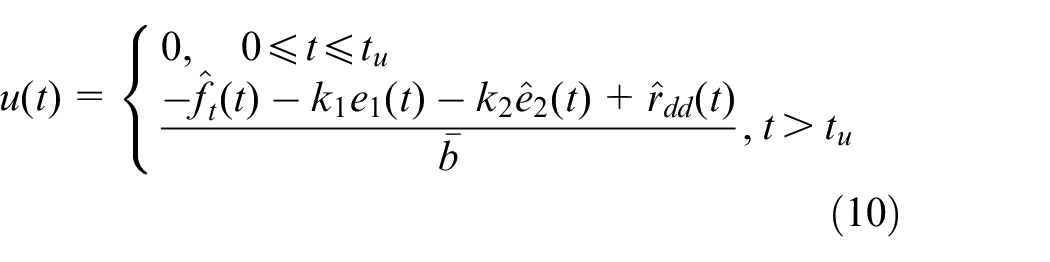
where the feedback gains

where the positive definite matrix

Finally, the error-based ADRC with memory structure, that is, (3), (5), and (8)–(11), is proposed, whose control block diagram is shown in Figure 1.
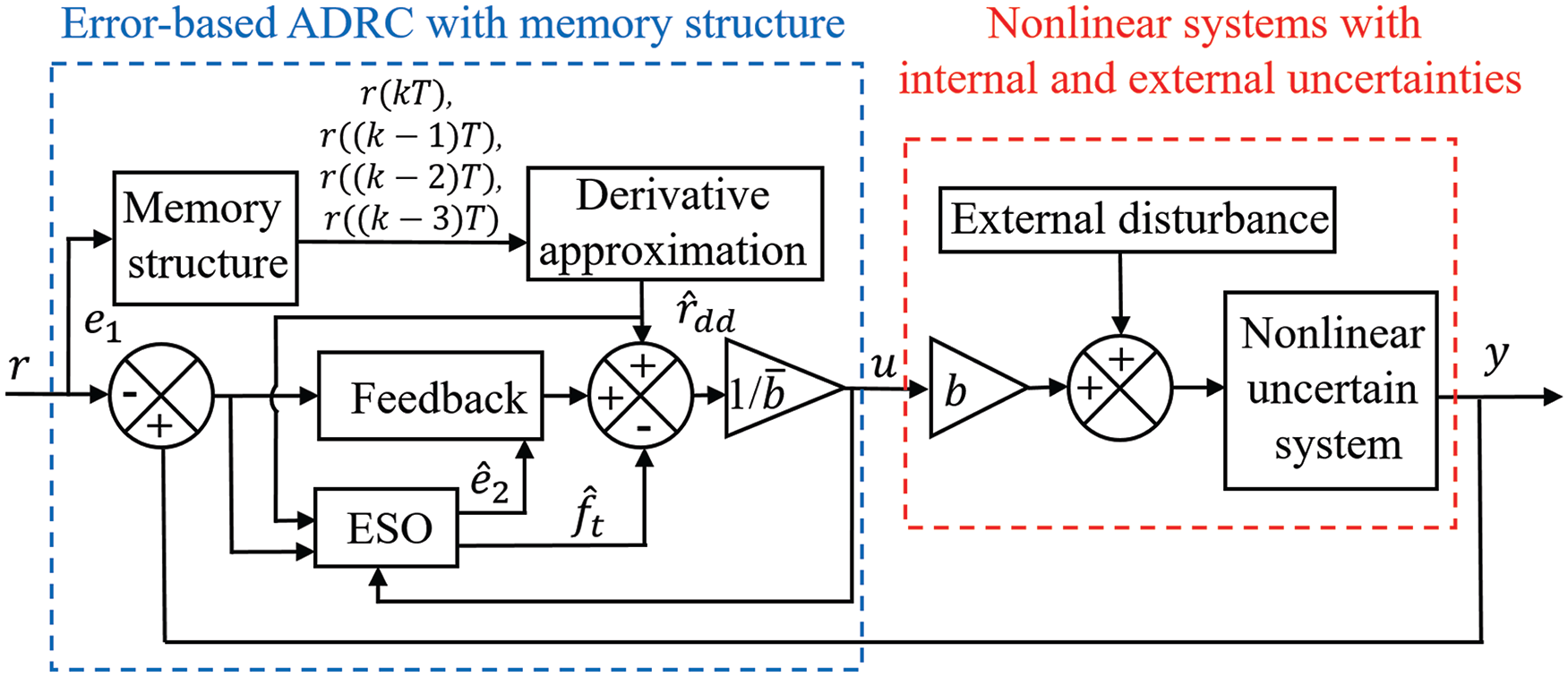
Control block diagram for error-based ADRC with memory structure.
In the next section, the properties of the proposed ADRC are comprehensively investigated, including transient performance, necessary condition for nominal control input gain and superiority of memory design.
Theoretical analysis
Transient performance
In this subsection, by comparing the ideal trajectory and the actual trajectory of the output, the transient tracking performance of closed-loop system is rigorously described. Meanwhile, the estimating performance of ESO is investigated.
Consider the following ideal trajectory for the output
where
Compared with the ideal trajectory
Theorem 1
Consider the system (1) with Assumptions 1–2 and the proposed ADRC (3), (5), and (8)–(11). Assume that

Then, there exist positives

for all
Theorem 1 ensures the stability of the proposed ADRC based closed-loop system. More specifically, the upper bounds of both the tracking and the estimating errors are explicitly shown. From (15), the upper bounds of tracking errors between the actual and ideal trajectories can be tuned sufficiently small by the ESO’s bandwidth
Necessary condition for nominal control input gain
In this subsection, to ensure the satisfied transient performance of the proposed ADRC, that is, (3), (5), and (8)–(11), the necessary condition for nominal control input gain is studied.
From Theorem 1, the satisfied transient performance of the proposed ADRC is described by the equation

for some small positive
Definition 1
For the system (1) and the proposed ADRC, that is, (3), (5), and (8)–(11), if for any given positive
Due to Definition 1, if the error between the ideal trajectory and the actual trajectory can be arbitrarily small by designing the bandwidth of ESO
To achieve well-designed property of the proposed ADRC, the following theorem investigates the necessary condition for the nominal control input gain
Theorem 2
Consider the system (1) with Assumptions 1–2 and the proposed ADRC (3), (5), and (8)–(11). If the proposed ADRC is well designed for any given

From Theorem 2, the necessary condition for the nominal control input gain
Superiority of memory design
In this subsection, the superiority of the proposed approximation based on memory structure is demonstrated by the comparison with the existing error-based ADRC.
To essentially investigate the main difference between the proposed ADRC and the existing error-based ADRC,31,32 the results in this subsection are under the condition that

To distinguish the variables from those of the proposed ADRC, the symbol

where

represents the total disturbance. Then, the existing error-based ADRC for the system (1) is presented as follows
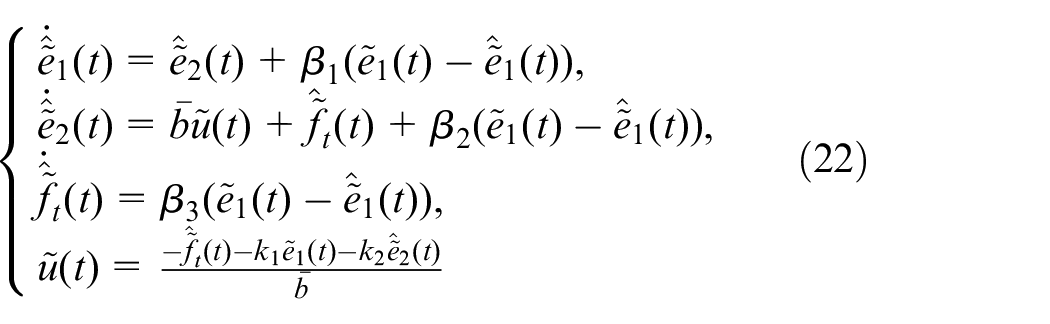
where
Based on the condition (19) and the notation
where

With the comparison of (20)–(24), the structures of the closed-loop systems for these two ADRC designs are exactly the same. However, the formulas of the total disturbances, that is, (21) and (24), are different. For ADRC design, the norms of the total disturbance and its derivative are supposed to be as small as possible, which can alleviate the burdens of estimating and compensating for the total disturbance.
Then, the sizes of the total disturbance and its derivative for these two ADRC designs are compared, as shown in the following theorem.
Theorem 3
Consider the system (1) with Assumptions 1–2, the proposed ADRC (3), (5), and (8)–(11), and the existing error-based ADRC (22). Assume that the condition (19) is satisfied. For any given positive constants
(S1) If

(S2) If

Theorem 3 demonstrates that the norms of the total disturbance and its derivative in the proposed ADRC are definitely smaller, if the derivatives of reference signal play a dominant role. From the statement (S1), the inequality
Experimental verification
In this section, the experiment of a manipulator platform is presented.
The setup of the manipulator platform is shown in Figure 2. The reference signal is artificially generated by the freely operated manipulator. With the measured angular position of the controlled manipulator and the current reference signal, the master computer calculates the control input by the designed control algorithm. Based on a series of devices, including the permanent magnet synchronous motor and the gear reducer, the produced input signal eventually affects the controlled manipulator. To verify the capability of uncertainty rejection, the additional digital uncertainty is further produced by the master computer.
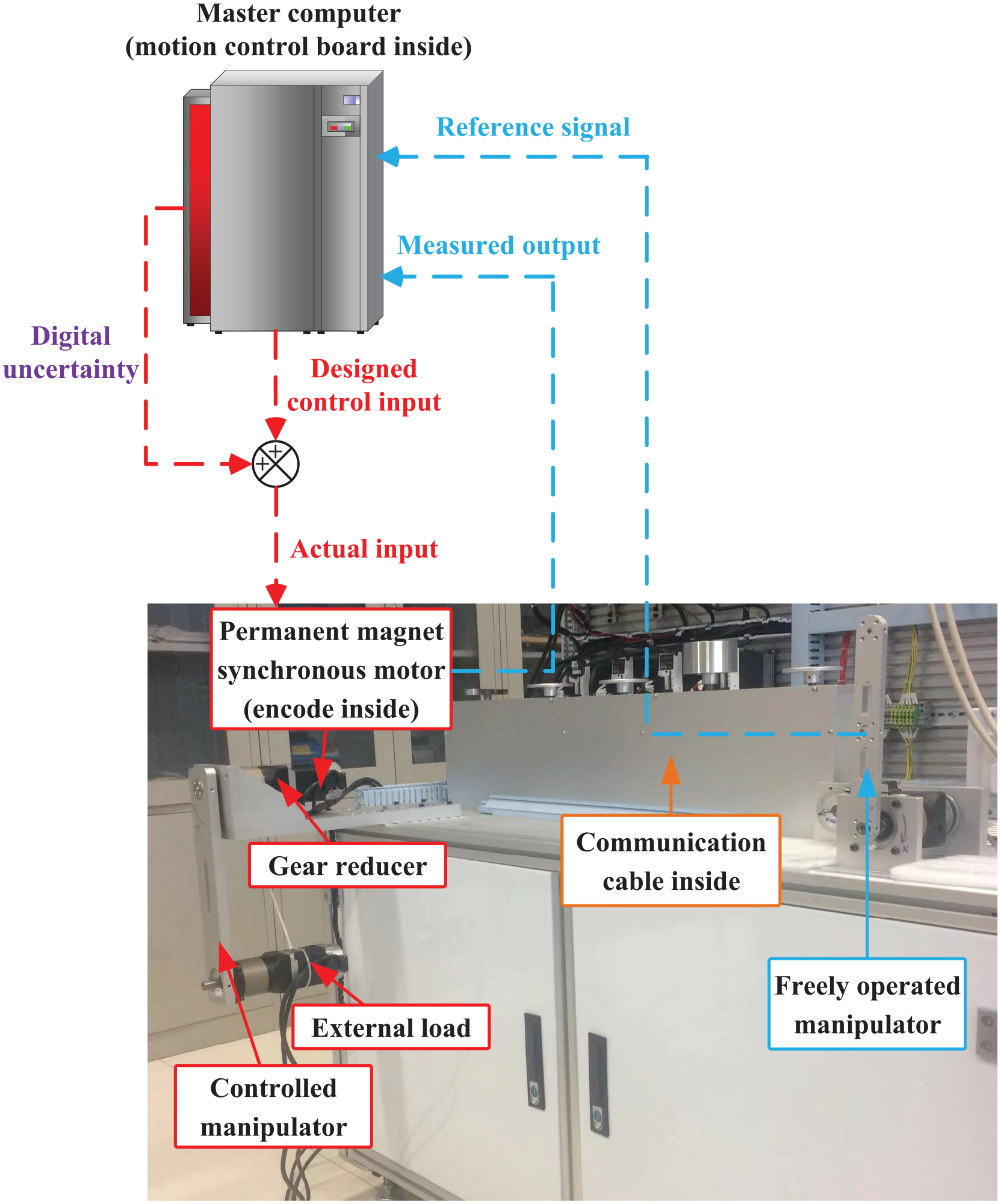
The setup of manipulator platform.
The dynamics of the manipulator platform can be formulated as

where
The control objective is to design the voltage
The system parameters are
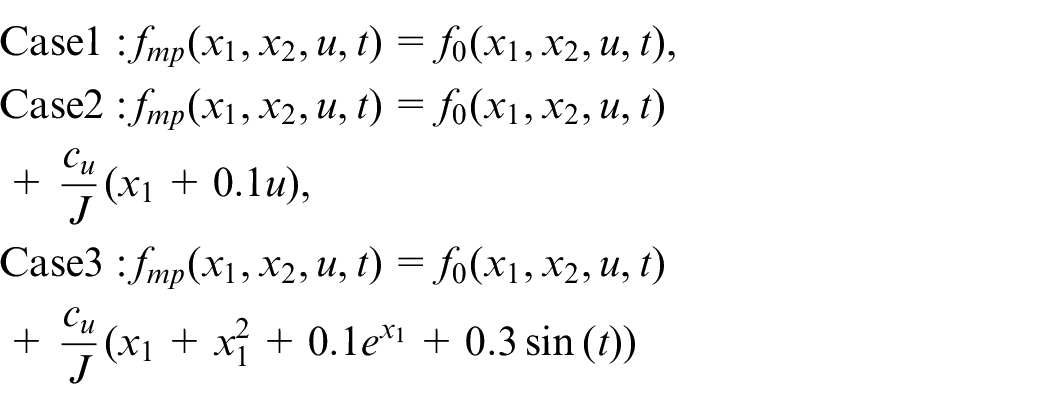
where
Then, the experimental results of the existing error-based ADRC (22) and the proposed ADRC (3), (5), and (8)–(11) are comparatively presented. To make the comparison be fair, the same bandwidth of ESO and feedback gains is selected

The experimental results are shown in Figures 3 and 4. Moreover, the performance indicators are presented in Table 1, including integral of absolute error (IAE), integral of time absolute error (ITAE), and integral of squared error (ISE).
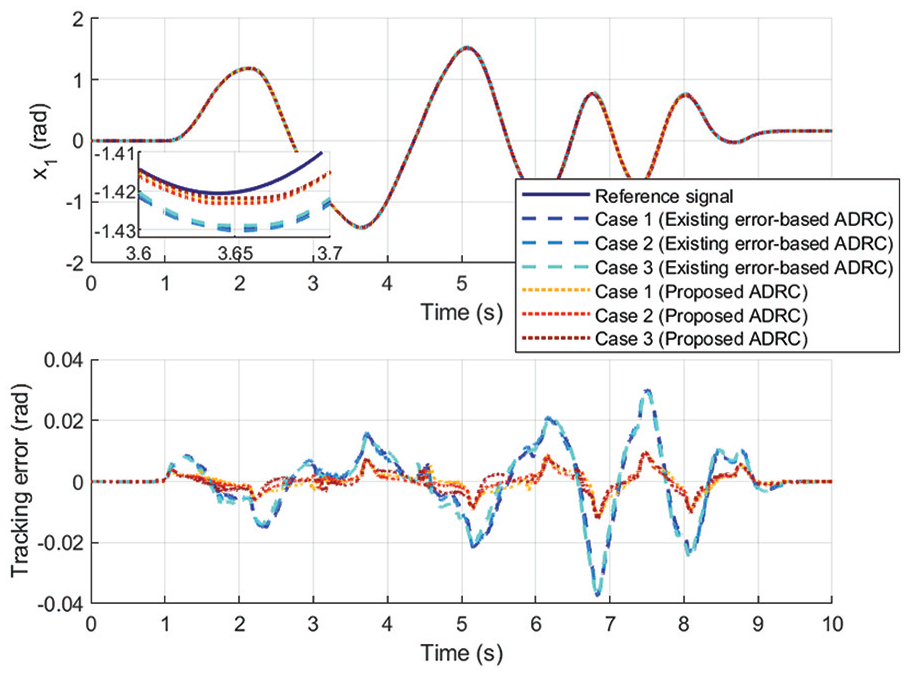
Tracking results for various uncertainties.
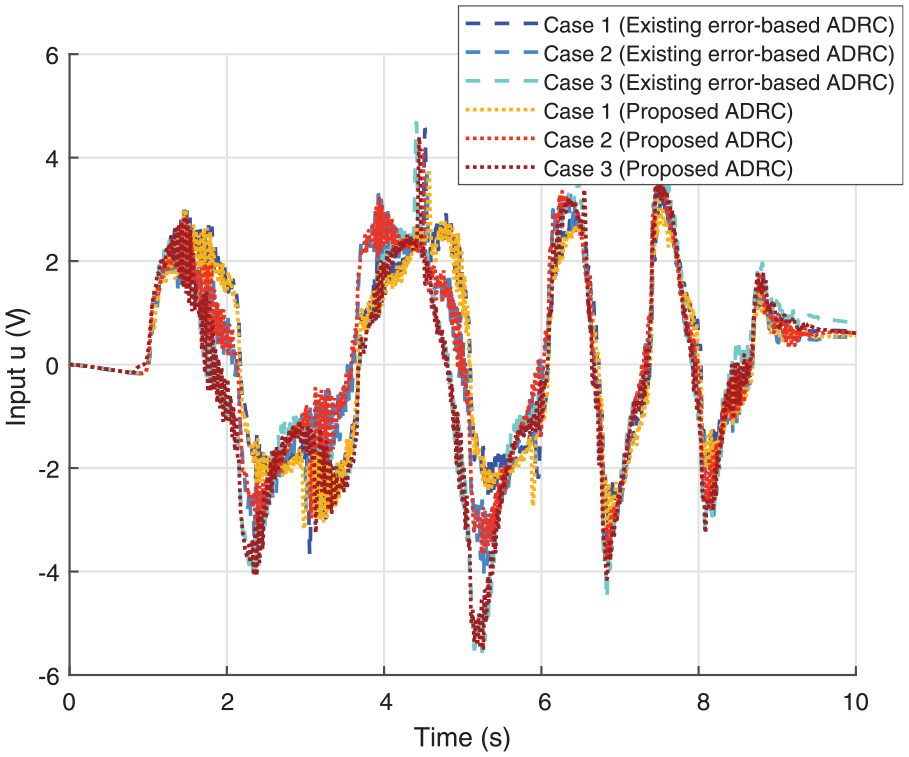
The control inputs for various uncertainties.
Performance indicators for various uncertainties.
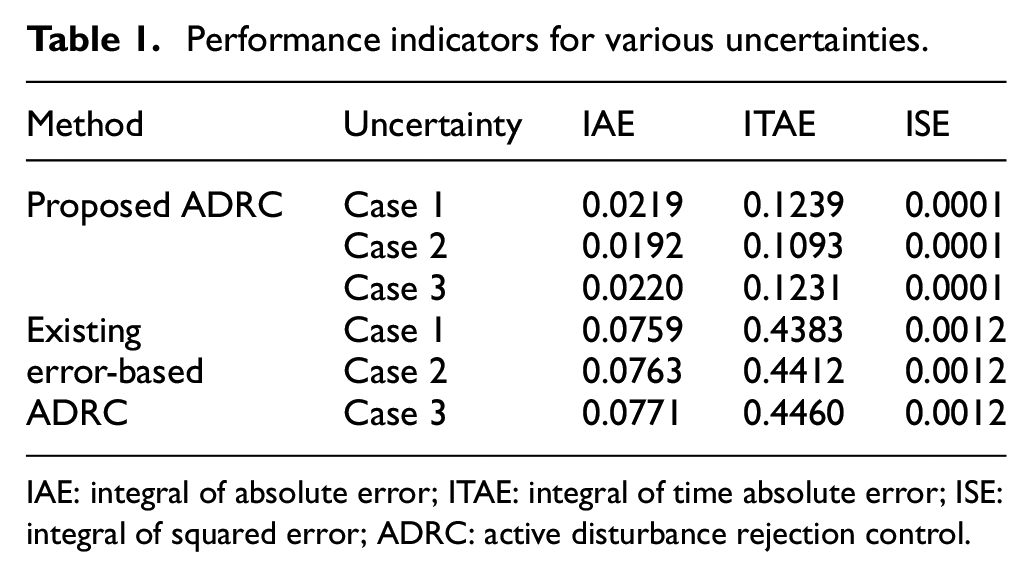
IAE: integral of absolute error; ITAE: integral of time absolute error; ISE: integral of squared error; ADRC: active disturbance rejection control.
From Figure 3, the controlled angular positions and tracking errors for various uncertainties are shown. Figure 3 shows that these two ADRC designs have consistent tracking performance despite various uncertainties. Moreover, the higher tracking accuracy of the proposed ADRC is visually demonstrated by Figure 3, especially during the time that the reference signal drastically changes. Figure 4 presents the control inputs for various uncertainties, which changes smoothly. Furthermore, from Table 1, the indicators of tracking errors have at least 70% reduction by the proposed ADRC, which illustrates the superiority of the proposed ADRC.
Conclusion
The paper studies the control problem for nonlinear uncertain systems with the situation that only the current reference signal is available. An error-based ADRC with memory structure is novelly proposed. By constructing the memory structure to save the previous reference signals, an approximation for the second-order derivative of the reference signal is proposed. Then, with the estimation for the total disturbance by ESO, the control input composed of the compensations for the total disturbance and the second-order derivative of reference signal is designed. The properties of the proposed ADRC are comprehensively studied, including transient performance, necessary condition for nominal control input gain, and superiority of the memory structure. The analysis of transient performance implies the high consistence of the closed-loop system. More importantly, the necessary condition for nominal control input gain is quantitatively analyzed, which illustrates the fundamental requirement for uncertain control input gain. Furthermore, the sizes of the total disturbance and its derivative are proved to be smaller, which can alleviate the burdens of estimating and compensating for total disturbance. Finally, the experiment for a manipulator platform shows the effectiveness of the proposed method.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Fundamental Research Funds for the Central Universities (GK202003008).