The aim of this manuscript is to tackle the tracking problem for uncertain semi-Markov systems. More precisely, the mode-dependent event-triggering communication approach is introduced for networked controller design procedure, which can considerably increase the signal transmission efficiency. Based on the Lyapunov–Krasovski method, mode-dependent sufficient conditions are derived and the tracking errors could achieve the asymptotic mean-square stability, and mode-dependent controllers could be further calculated by convex optimization. A numerical simulation with application to vertical take-off and landing helicopter would be performed for verifying the availability and usefulness.
In the past years, Markov jump systems (MJSs) have drawn a lot of research attention owing to their ability for modeling practical systems with jumping parameters governed by a Markov chain.1–5 To name a few, power systems,6 neural systems,7 robotic systems8 can be effectively described by MJSs with corresponding analysis and synthesis results. It is worth mentioning that often transition probability may be not kept constant in certain scenario, then we formulated the semi-Markovian jump systems (SMJSs).9 It can be found that by introducing the SMJS, more applicable results with less conservatism can be obtained when modeling the practical applications. As a results, some initial efforts have been paid to SMJS with remarkable methods including stability problem,10 state estimation problem,11 and synchronization problem.12 Meanwhile, it is noticed that the parameter uncertainties can always affect the practical systems. Furthermore, sometimes, these uncertainties can exhibit mode-dependent characteristics for MJS or SMJS. Therefore, some effective control approaches for dealing with these mode-dependent uncertainties have been addressed.13,14
In the meantime, advanced networked control systems (NCSs) have been extensively investigated and used in all kinds of real-world applications.15–17 It should be pointed out that certain network constraints can be found during networked information transmission, such as transmission delays,18 bandwidth limitations,19 and signal fading effects.20 Especially, in order to cope with network burden, the event-triggered communication methods have been significantly developed instead of traditional time-triggered schemes in recent years. The innovation of event-triggered strategy is formulated by certain triggering conditions, which implies that the signal transmission frequency over the network can be decreased and the network utilization efficiency can be increased. By considering these advantages, many event-based control strategies have been studied and can be found.21–23 Moreover, for the MJS or SMJS, it is reasonable and urgent to design the mode-dependent event-triggered strategy for more applicable results. Recently, remarkable results can be found,24,25 where effective event-triggered control strategies have been developed. In addition, since the vertical take-off and landing (VTOL) helicopters are capable of taking-off, landing within limited field, and stable hovering over target region, many related researches have been investigated.26,27 This has distinguishing advantages compared with traditional unmanned air vehicles. To the best of the authors’ knowledge, unfortunately, the challenging and open problems for the tracking control problem of SMJS with effective event-triggered mechanism still exists, especially with the mode-dependent strategies.
Inspired by the what have been discussed above, the tracking problem of SMJS accompied by mode-dependent parameter uncertainties is studied by proposing a mode-dependent event-triggered transmission scheme. In comparison with most reporting literature, the novelties in this paper are presented by the following aspects: (1) for the sake of reducing the transmission load, an effective mode-dependent event-triggering communication approach together with corresponding sampling interval is proposed. (2) Sufficient conditions are established by selecting a reasonable mode-dependent Lyapunov–Krasovski functional, and then the tracking error would reach mean-square asymptotic stability with prescribed property.
Our manuscript would be arranged with this contents. The tracking control problem for SMJS is first formulated and the mode-dependent controllers are designed with novel mode-dependent event-triggered mechanism. Then, main theoretical results are given by matrix convex optimization method. In addition, the effectiveness of our control strategy can be illustrated and supported with the VTOL helicopter simulation example. Finally, the manuscript is concluded with some further prospect.
Notations:
denotes the dimensional Euclidean space.
means is a positive definite.
denotes the block-diagonal matrix.
represents the expectation operator.
is a probability space.
Preliminaries and problem formulation
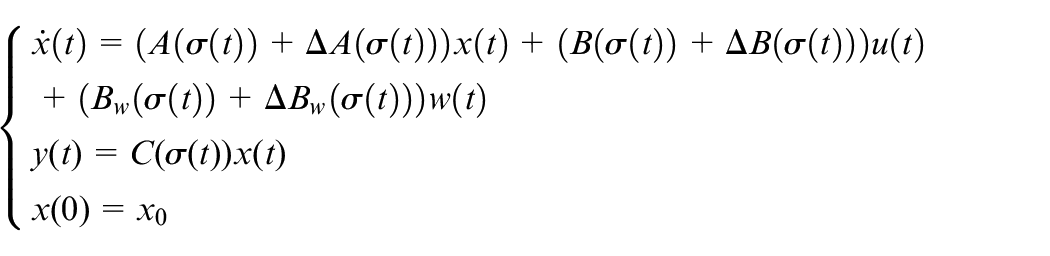
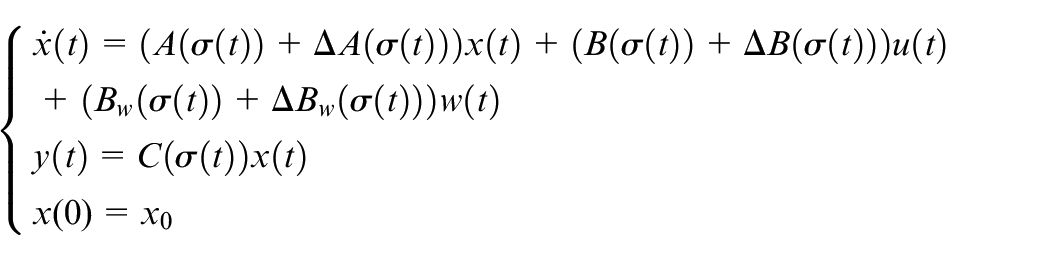
Taking into account the below SMJS with mode-dependent uncertainties:
where denotes the system state, represents the control input, and is the external disturbance. indicates a continuous-time discrete-state semi-Markov process on taking values in a finite set . Furthermore, the transition probability matrix , , is defined as follows
where , , , is the transition rate from mode at time to mode at time satisfying , . For a fixed-system mode , and are known constant matrices, and , and denote the parameter uncertainties, respectively, which can be given as follows
Note that , , , , , and are known constant matrices and is a unknown time-varying matrix satisfying
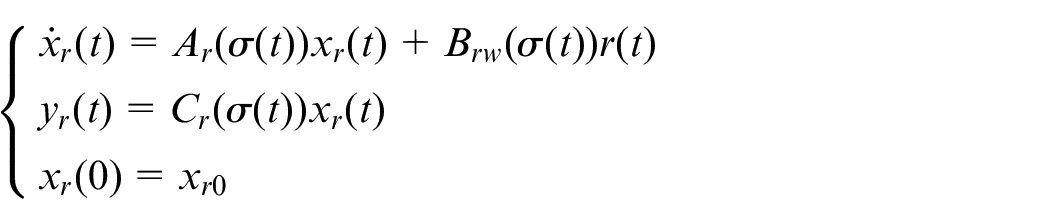
In addition, the output-tracking reference model is given by
where denotes the desired tracking reference and denotes the external disturbance. Without loss of generality, it is assumed that the tracking system and the system are with the same system mode with synchronous control during the event-triggered control procedure.
Define the tracking error as
such that the reference signal can be tracked when the is asymptotically stable in the mean-square sense.
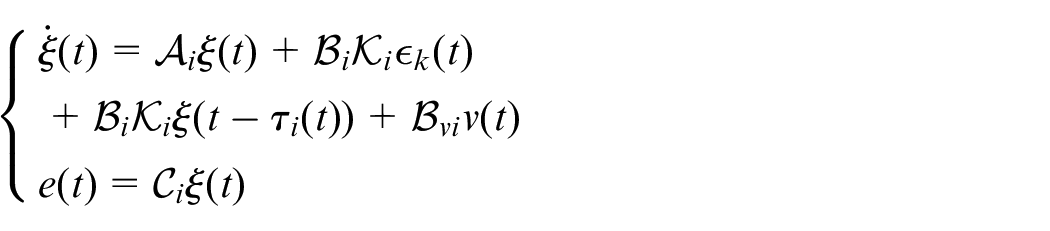
For simplification, denote as index and the augmented system can be obtained as follows
where
Under the networked environment, it is supposed that the sensor is time-driven with mode-dependent sampling period according to mode .28 Then the event generator updates the released signals with , . Correspondingly, the event-triggering function is proposed as follows
where
denotes the mode-dependent triggering scale matrix and .
Remark 1
It is marked that the mode-dependent event-triggering strategy is adopted in this paper, which can effectively deal with the system jumping behaviors accordingly by mode information.
Remark 2
Compared with the mode-independent sampling schemes, the mode-dependent sampling strategy can be more applicable with different modes and would lead to less conservatism with different triggering conditions by utilizing the mode information.
The mode-dependent tracking controller can be designed by
where denotes the mode-dependent controller gains.
By applying the virtual delay approach and letting
the event-triggering function can be rewritten by
where . Moreover, it can be obtained that
Furthermore, the following -tracking performance is introduced
where denotes the performance scalar.
To this end, the aim of our manuscript is going to project a desired mode-dependent controller for ensuring the -tracking performance, and the following lemmas are provided for deriving the main results.
Lemma 1
For any matrix , scalars , satisfying , vector function such that the concerned integrations are well defined, then29
where
Lemma 2
Let , and be real matrices of appropriate dimensions with satisfying .30 Then, , if and only if there exists a scalar such that , or equivalently
Controller design
In this following, our mode-dependent controller design procedure should be presented in following theorems.
Theorem 1
The tracking problem of the semi-MJS is solved by prescribed mode-dependent controller gains , if there are mode-dependent matrix , matrices and , such that for each , where
Proof
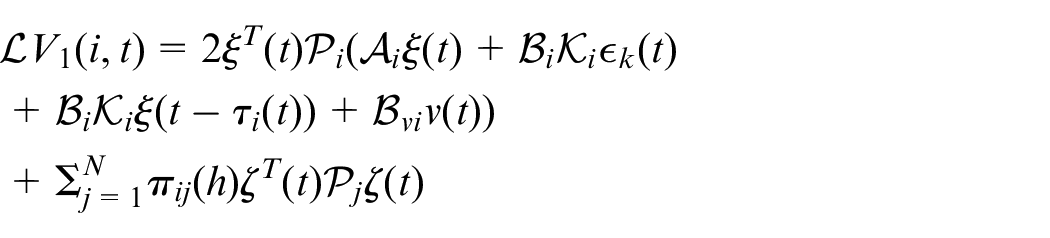
Choose the below Lyapunov–Krasovski function with respective mode
where
Moreover, the weak infinitesimal operator of is stated as follows
Accordingly, one has
where stands for elapsed time and denotes cumulative distribution function and represents probability intensity jumping.
Then, one can derive that
By Lemma 1, it should be derivated that
In addition, it holds that
where
From the event-triggering function, it can be deduced that
Consequently, one has
where
Therefore, it can be obtained by Schur complement lemma that if holds, then the -tracking performance under zero initial conditions in the mean-square sense is achieved, then the proof could be completed.
Remark 3
Note that the conditions in Theorem 1 are not standard linear matrix inequalities due to time-varying . As a consequence, the next theorem is further provided by Theorem 1 for obtaining the desired controllers.
Theorem 2
The tracking problem of the semi-MJS is solved, if there exist mode-dependent matrices and , matrices , , such that it holds that , , , where
Moreover, if the above conditions are satisfied, the mode-dependent controller gains could be derived by
Proof
First, take and , matrices , and consider the time-varying dwell time that can be rewritten by , , and . Then, denote , , , , , , , , , and . Finally, by performing matrix congruent transformation and Lemma 2, the proof can follow directly by Theorem 1.
Remark 4
For obtaining an optimized disturbance attenuation level , the following optimization problem can be derived, such that
Illustrative example
In this section, the simulation results for VTOL helicopter model are given to validate our proposed controller design.
First, the VTOL helicopter system in the vertical plane can be described by the following semi-MJS
where and , , , and stand for the horizontal velocity, the vertical velocity, the pitch rate, and the pitch angle of VTOL, respectively; represents the lift of VTOL helicopter and is the helicopter disturbance. Moreover, the system parameters are with different values according to the airspeed of VTOL helicopter.
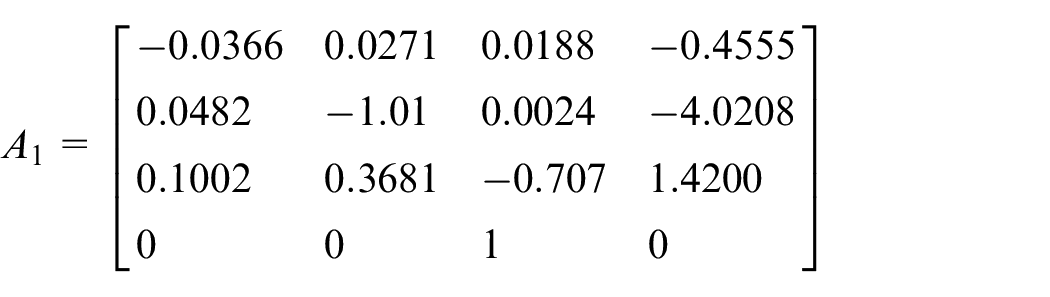
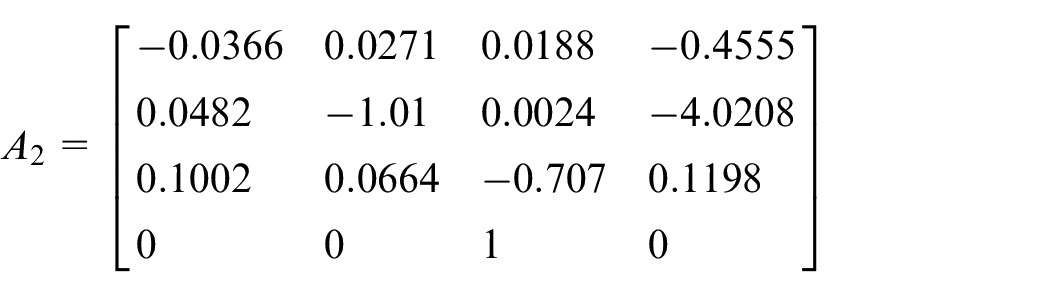
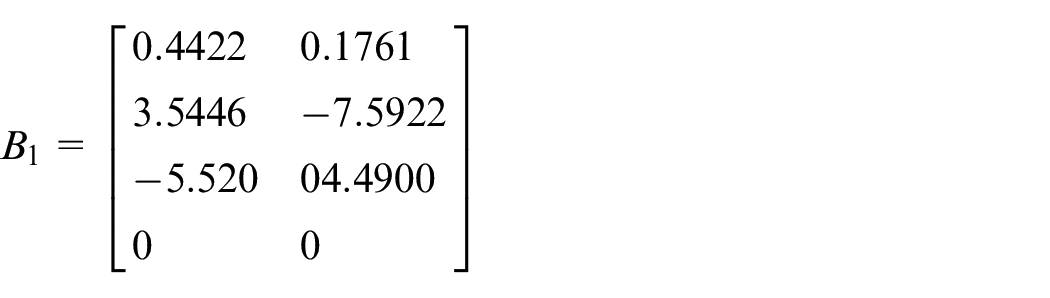
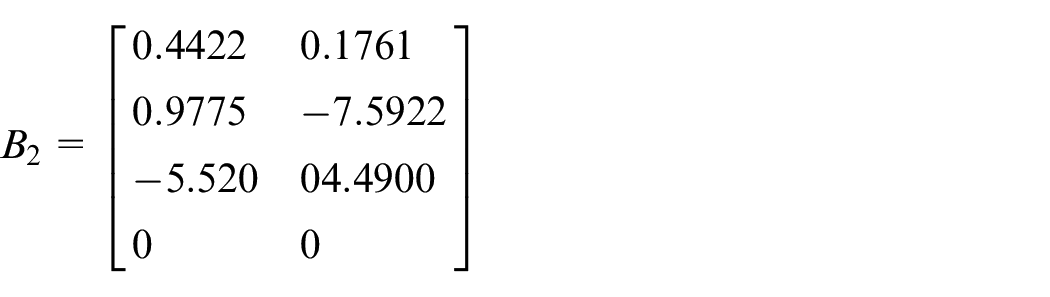
Consider the following VTOL helicopter model with two jumping modes (135 knots and 60 knots), where the dynamics are given by Narendra and Tripathi31
In addition, the reference system model is given as follows
The parameter uncertainties are assumed to be with
and
Furthermore, it is supposed to be that and , which involves that , , , and with .
In this numerical simulation, it is assumed that and . The performance index is optimized by and the performance index of mode-independent event-triggered scheme is , which shows the advantages of our proposed scheme. The event-triggering scalar is given by and . The external disturbances are supposed to be and . With these parameters, the event-triggered matrices and the desired mode-dependent controller gains and the event-triggering function are obtained as follows
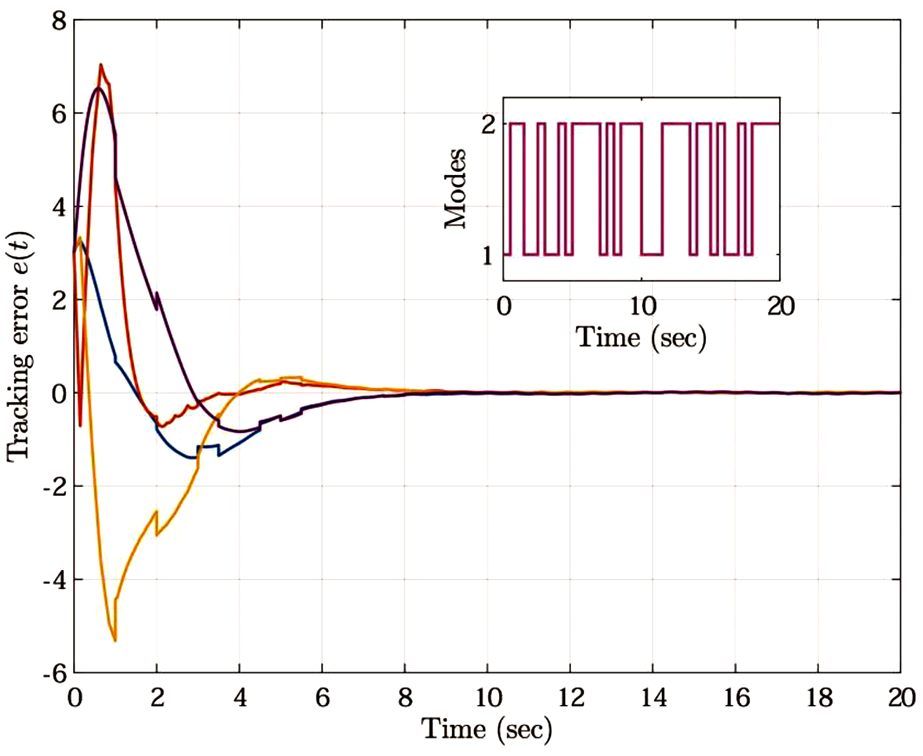
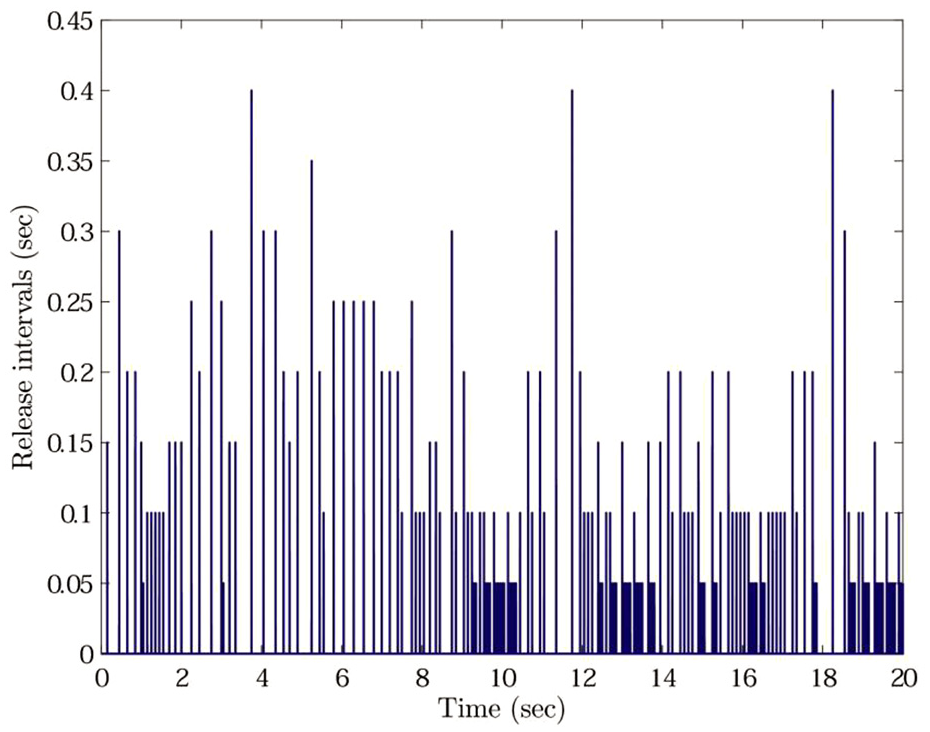
As a result, it can be seen from Figures 1 and 2 that the developed mode-dependent controllers could effectively stabilize the VTOL Helicopter with disturbance. Moreover, the event-triggered information transmission is more effective with broadcasting instants and release intervals. Thus, these simulation results can support our proposed scheme.
The state response of tracking error.
Broadcasting instants and release intervals.
Conclusion and discussions
This manuscript is considered with the mode-dependent tracking control problem of semi-Markovian jump systems with parameter uncertainties. More precisely, the mode-dependent event-triggered transmission mechanism together with the mode-dependent controllers are designed, respectively. By employing the Lyapunov–Krasovski method, sufficient conditions are first presented, which guarantee the prescribed -tracking performance. Then, the corresponding controller gains are calculated via convex optimization method. Finally, the simulation of VTOL helicopter is performed for showing the usefulness of the developed control strategy. Our future study would focus on extending this study to the cases with asynchronous mode transitions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Our work is supported by the National Key Research and Development Program of China (Grant no. 2017YFB1 300200, 2017YFB1300203), the Joint Research Fund between the National Natural Science Foundation of China (NSFC) and Shen Zhen (Grant no. U1713201), and the National Natural Science Foundation of China (Grant no. 61702516, 51705515, 61603389).
ORCID iD
Wei Wu
References
1.
ShiPLiF.A survey on Markovian jump systems: modeling and design. Int J Control Autom Syst2015; 13(1): 1–16.
2.
WuZGShiPShuZ, et al. Passivity-based asynchronous control for Markov jump systems. IEEE T Automat Contr2016; 62(4): 2020–2025.
3.
BolzernPColaneriPDe NicolaoG.Almost sure stability of Markov jump linear systems with deterministic switching. IEEE T Automat Contr2012; 58(1): 209–214.
4.
ShenMYanSSunY, et al. Nonfragile H∞ output feedback control of linear systems with an event-triggered scheme against unreliable communication links. ISA Trans2019; 84: 96–103.
5.
ShenMParkJHYeD.A separated approach to control of Markov jump nonlinear systems with general transition probabilities. IEEE T Cybernetic2015; 46(9): 2010–2018.
6.
UgrinovskiiVAPotaHR.Decentralized control of power systems via robust control of uncertain Markov jump parameter systems. Int J Control2005; 78(9): 662–677.
7.
ShenHParkJHWuZG.Finite-time synchronization control for uncertain Markov jump neural networks with input constraints. Nonlinear Dynam2014; 77(4): 1709–1720.
8.
KangYLiZDongY, et al. Markovian-based fault-tolerant control for wheeled mobile manipulators. IEEE T Control Syst Tech2011; 20(1): 266–276.
9.
HuangJShiY.Stochastic stability and robust stabilization of semi-Markov jump linear systems. Int J Robust Nonlinear Control2013; 23(18): 2028–2043.
10.
QiWZongGKarimHR.Observer-based adaptive SMC for nonlinear uncertain singular semi-Markov jump systems with applications to DC motor. IEEE T Circuit Syst I2018; 65(9): 2951–2960.
11.
LiFWuLShiP, et al. State estimation and sliding mode control for semi-Markovian jump systems with mismatched uncertainties. Automatica2015; 51: 385–393.
12.
WangJShenH.Passivity-based fault-tolerant synchronization control of chaotic neural networks against actuator faults using the semi-Markov jump model approach. Neurocomputing2014; 143: 51–56.
13.
ChenWHXuJXGuanZH.Guaranteed cost control for uncertain Markovian jump systems with mode-dependent time-delays. IEEE T Automat Contr2003; 48(12): 2270–2277.
14.
MaSBoukasEK.A singular system approach to robust sliding mode control for uncertain Markov jump systems. Automatica2009; 45(11): 2707–2713.
15.
ZhangXMHanQLYuX.Survey on recent advances in networked control systems. IEEE T Ind Inform2015; 12(5): 1740–1752.
16.
GuptaRAChowMY.Networked control system: overview and research trends. IEEE T Ind Electron2009; 57(7): 2527–2535.
17.
MontestruqueLAAntsaklisPJ.On the model-based control of networked systems. Automatica2003; 39(10): 1837–1843.
18.
HeemelsWMHTeelARVan de WouwN, et al. Networked control systems with communication constraints: tradeoffs between transmission intervals, delays and performance. IEEE T Automat Contr2010; 55(8): 1781–1796.
19.
XiongJLamJ.Stabilization of networked control systems with a logic zoh. IEEE T Automat Contr2009; 54(2): 358–363.
20.
XiaoNXieLQiuL.Feedback stabilization of discrete-time networked systems over fading channels. IEEE T Automat Contr2012; 57(9): 2176–2189.
21.
WangXLemmonMD.Event-triggering in distributed networked control systems. IEEE T Automat Contr2010; 56(3): 586–601.
22.
TabuadaP.Event-triggered real-time scheduling of stabilizing control tasks. IEEE T Automat Contr2007; 52(9): 1680–1685.
23.
GarciaEAntsaklisPJ.Model-based event-triggered control for systems with quantization and time-varying network delays. IEEE T Automat Contr2012; 58(2): 422–434.
24.
WuXMuX.Event-triggered control for networked nonlinear semi-Markovian jump systems with randomly occurring uncertainties and transmission delay. Inform Sci2019; 487: 84–96.
25.
WuXMuX.Stabilization for networked semi-Markovian jump systems with randomly occurring uncertainties via improved dynamic event-triggered scheme. Int J Robust Nonlin Control2019; 29(13): 4609–4626.
26.
BertrandSGuénardNHamelT, et al. A hierarchical controller for miniature VTOL UAVs: design and stability analysis using singular perturbation theory. Control Eng Pract2011; 19(10): 1099–1108.
27.
ErginerBAltuğE.Design and implementation of a hybrid fuzzy logic controller for a quadrotor VTOL vehicle. Int J Control Automat Syst2012; 10(1): 61–70.
28.
ZhangWAYuL.Output feedback stabilization of networked control systems with packet dropouts. IEEE T Automat Contr2007; 52(9): 1705–1710.
29.
ParkPKoJWJeongC.Reciprocally convex approach to stability of systems with time-varying delays. Automatica2011; 47(1): 235–238.
30.
XieL.Output feedback H∞ control of systems with parameter uncertainty. Int J Control1996; 63(4): 741–750.
31.
NarendraKSTripathiS.Identification and optimization of aircraft dynamics. J Aircraft1973; 10(4): 193–199.