
Abstract
This paper presents a super-twisting sliding mode control method for the formation maneuvers of multiple robots. In the real world of applications, the robots suffer from many uncertainties and disturbances that trouble the super-twisting sliding mode formation maneuvers very much. Especially, this issue has the adverse effects on the formation performance when the uncertainties and disturbances have an unknown bound. This paper focuses on this issue and utilizes the technique of disturbance observer to meet this challenge. In terms of the leader–follower framework, this paper investigates the integration of the super-twisting sliding mode control method and the disturbance observer technique. This kind of formation design has the guaranteed closed-loop stability in the sense of Lyapunov. Some simulations are implemented through a multi-robot platform. The results demonstrate that the superiority of the formation design regardless of uncertainties and disturbances.
Keywords
Introduction
Recently, multi-robot systems have paid great attention. 1 Compared with a complex robot, multi-robot systems are of merit. Not only such systems simplify individual robots, but also they are a platform to display collective behaviors.2,3 Multi-robot systems have broad applications, including but not limited to search and rescue, military reconnaissance, and collaborative projects.4,5
In many cases, the achievement of a given task needs to form up multiple robots according to some patterns. In order to coordinate and supervise the robots, the formation problem raises up. 6 This problem is rooted from some biological systems. In weird nature, schools of fishes in swimming always form up some patterns in order to protect themselves as well as team of ants in moving.7,8 As far as these biological systems are concerned, their formation patterns demonstrate strict hierarchy and high robustness because of the inherent existence of a certain formation mechanism.
Similarly, a multi-robot system also desires such a mechanism to coordinate the robots. It is reported that some typical mechanisms have been developed for multiple robots, that is, the virtual structure technique, the behavior-based algorithm, the artificial potential field approach, and the leader–follower framework. 9 Although the leader–follower framework among these typical mechanisms is criticized for its drawback of “single point of failure,” 10 this framework is well structured and even friendly from the aspect of control design. Especially, the leader–follower framework has visibly blossomed for the small- and medium-scale formation problem. Consequently, this paper does not focus on how to design a novel formation mechanism, but it works at the formation control design. Consequently, the leader–follower framework is directly adopted.
Considering the individual robots of a multi-robot system, they suffer from uncertainties and disturbances from the viewpoint of reality. Without doubt, the formation dynamics of this multi-robot system become uncertain.11,12 Affected by the adverse factors, the formation control problem of the multiple robots becomes interesting and challenging. Some control strategies have been reported, that is, iterative learning–based control methods,13,14 model predictive formation control, 15 type-2 fuzzy formation control,16,17 and so on.
The sliding mode control is a synthetic tool. It is alternative for the formation problem of uncertain multi-robot systems. Hitherto, some sliding mode–based control methods have been presented in the formation field of multiple robots, that is, the first-order sliding mode control,18,19 the integral sliding mode control, 8 the derivative and integral terminal sliding mode control, 4 and the terminal sliding mode control. 20 With regard to the sliding mode control, its invariance is the most attractive property. This property can guarantee that a sliding mode control system is completely robust despite the matched uncertainties and disturbances. 21
Actually, the sliding mode control is not perfect, and it is confronted with the dilemma of chattering. As a result, many ideas have been devoted to the decrease and elimination of chattering. Among these ideas, the super-twisting–based sliding mode control technique is advocated. Partly, it only needs the information of a sliding mode variable, and it gets rid of the dependence on the time derivative of this sliding mode variable. 22
On the assumption that the bound of uncertainties and disturbances is known, this technique is able to effectively force the sliding mode variable and its time derivative to the origin in finite time.23,24 Unfortunately, this assumption is not mild in terms of uncertain multi-robot systems. In reality, one has to overestimate this bound from the aspect of the closed-loop formation stability.25,26 However, the overestimate definitely enlarges the gain of the super-twisting sliding mode control technique. A potential solution is to design a module that can estimate these uncertainties and disturbances.
Motivated by this solution, the disturbance observer technique 27 is taken into consideration. Inherently, the technique is a kind of compensation mechanisms because it can estimate the uncertainties and disturbances via some measurable information. The technique can contribute to the ability of disturbance attenuation for a control system. Concerning the super-twisting sliding mode formation maneuvers, it is possible to avoid the overestimate problem of the gain by the disturbance observer technique. So far, it is reported that the disturbance observer technique has been successfully applied to mechatronics systems,28–31 chemical and process systems, 32 biological systems, 33 aerospace systems, 34 and so on. This paper adopts the technique for the super-twisting sliding mode formation maneuvers of uncertain multi-robot systems. The purpose is to refine the formation performance when the bound of the uncertainties and disturbances is unknown.
The remainder of this paper is organized as follows. Section “Formation model” models both a mobile robot and a leader–follower pair. Section “Formation design” addresses the super-twisting sliding mode control, adopts the disturbance observer technique to estimate the uncertainties and disturbances, and analyzes the closed-loop formation stability in the sense of Lyapunov. Section “Simulation results” implements the presented control method on a multi-robot system platform, and also illustrates some numerical results and comparisons. Finally, section “Conclusion” draws the conclusion.
Formation model
A mobile robot
The unicycle-like robot in Figure 1 moves in the horizontal plane. It is round and the diameter is 2r. Its two parallel wheels have a same axis, independently controlled by two direct current motors. The robot can simultaneously rotate and translate, which is described by

In equation (1), (x and y) located at the center of the robot represents its translational coordinates and θ indicates its rotational coordinate. To know the position, a positioning sensor at the front castor of this robot is set up. The axis of the sensor is orthogonal to the axis of the two wheels.
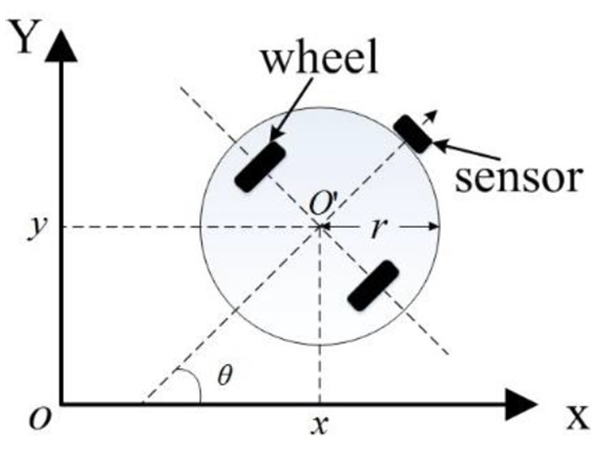
Sketches of the unicycle-like robot.
On the assumption of pure rolling and no slipping, the ideal kinematic model of this robot4,8 has the form of


where v is the robot’s linear velocity in the x–y coordinates and
Concerning the constraint (3), the time derivative of equation (2), namely, the ideal dynamic model, can be written as

In equation (4),
Since the robot in reality suffers from a variety of uncertainties and disturbances—for example, friction, slip, and slide shift—the real dynamic model 8 can be derived from equation (4)
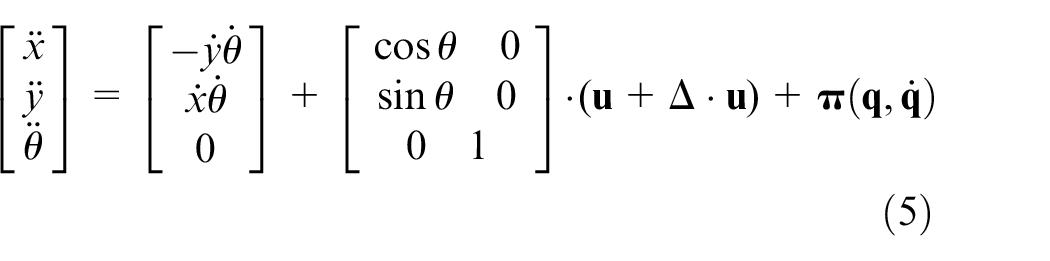
In equation (5), the term

where

where
A leader–follower pair
Consider a multi-robot system containing N robots. Each robot is the same as the robot in Figure 1. Without loss of generality, the robot i is selected as the leader, and it makes up N − 1 leader–follower pairs with the left robots. Figure 2 illustrates such a leader–follower pair made of the leader i and the follower k. 8
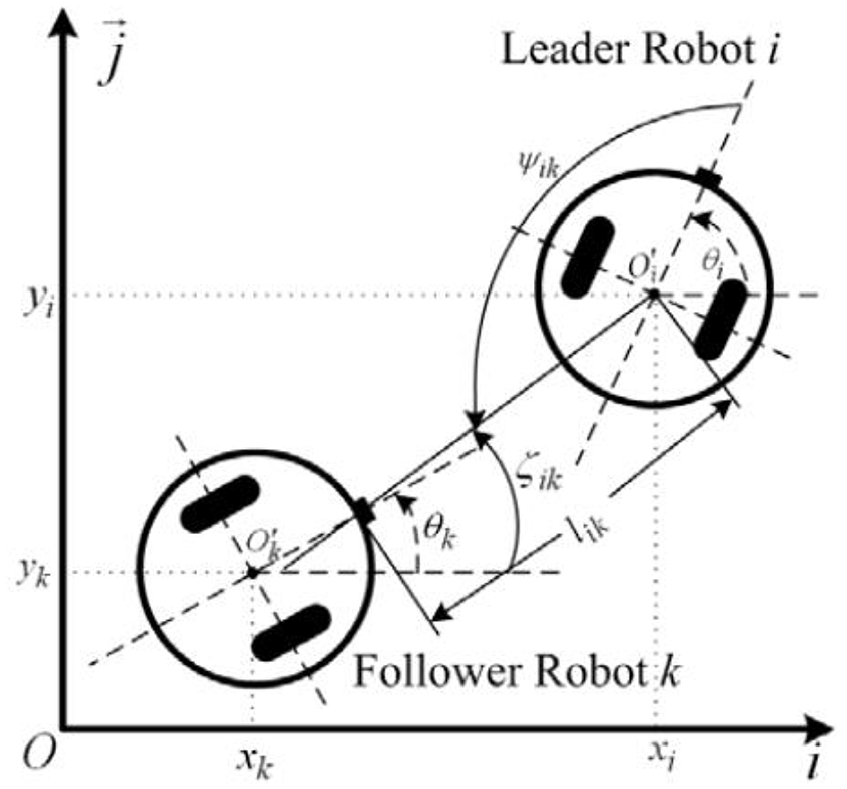
Sketches of a leader–follower pair.
In Figure 2, the subscript i is adopted to label the individual variables of the leader, the subscript k is employed to describe the individual variables of the follower, and the subscript ik is used for the relative variables of this pair. Here, the relative distance lik means the distance between the leader’s center and the follower’s front castor, which is formulated by

where

The relative bearing angle

where

The purpose of the paper is to investigate the super-twisting sliding mode formation maneuvers of this multi-robot system via extreme learning machine (ELM). Motivated by the purpose, the formation objective of the leader–follower scheme is that each leader–follower pair of the multi-robot system has to keep the desired relative distance and the desired relative bearing angle in spite of uncertainties and disturbances. In order to focus on the objective, we consider some ideal conditions as follows: (1) there are neither collisions nor communication delays; and (2) the follower is well-known, that is, it knows its position and velocity, meanwhile, it can obtain the position and the velocity of the leader as well.
Formation dynamics by the first-order and second-order differential equations
Let

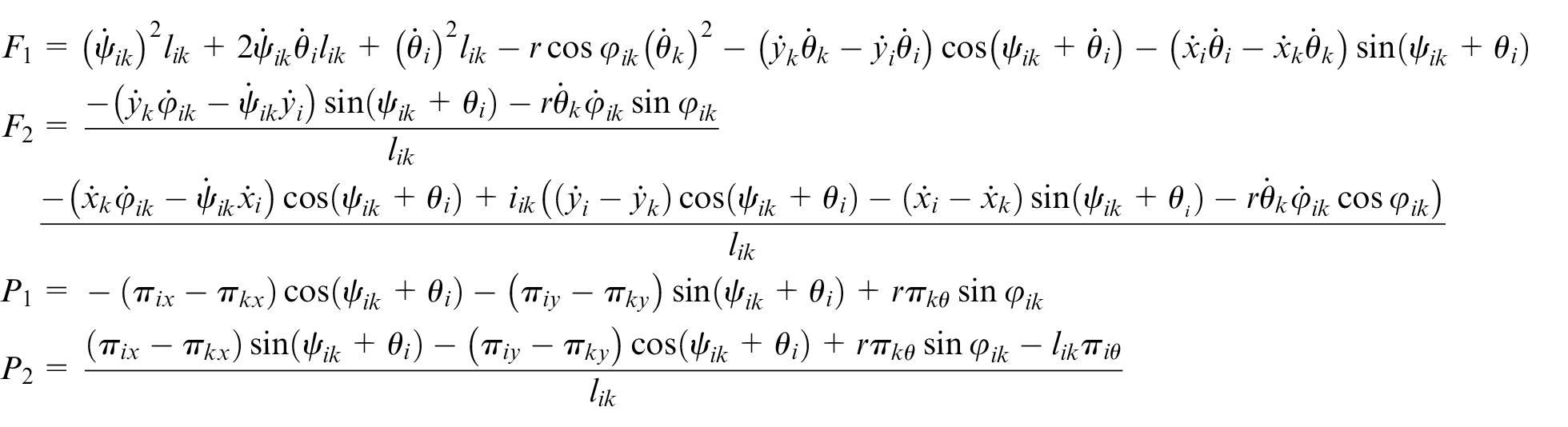
In equation (8), the second derivatives of

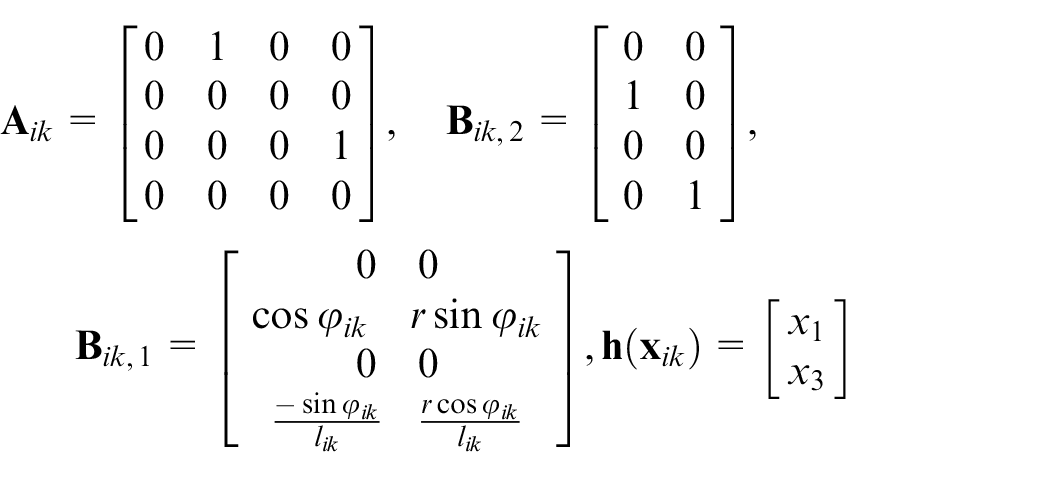
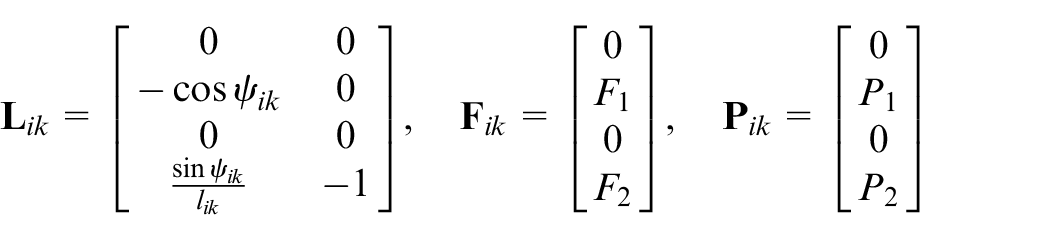
where
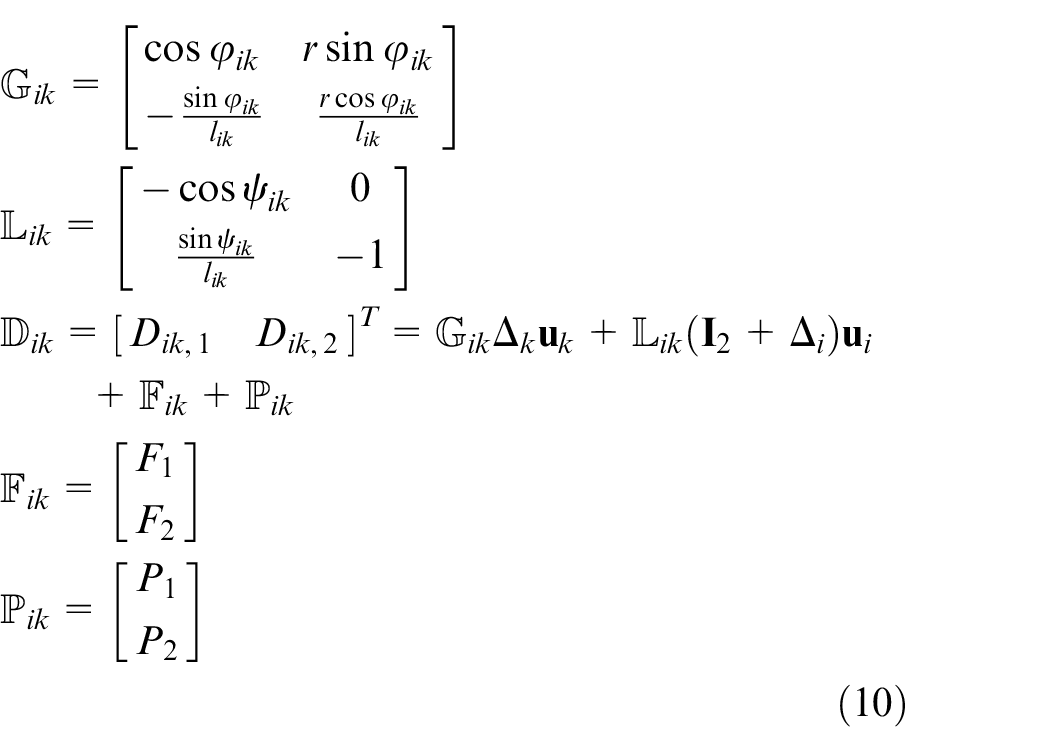
In equation (10),
Assumption 1
The vector

Here, their ∞-norm satisfy

where
Define a vector

where


Both equations (9) and (13) describe the formation dynamics, where equation (9) is in the form of the second-order differential equations, and equation (13) has the expressions of the first-order differential equations. Inherently, they are equivalent to each other, and both of them can help the following control design.
Formation design
Sliding surfaces and input–output dynamics
The super-twisting law is a powerful and effective technique that can realize the second-order sliding mode control design. The technique can effectively deal with the controlled plant with a relative degree equal to one with respect to the control input. With regard to the matched uncertainties and disturbances, it can make the sliding mode variable and its time derivative convergent to the origin in finite time. Consequently, we consider this technique as a solution for formation maneuvers of the leader–follower pair in Figure 2. In order to implement the control design, the sliding surfaces—that is, the sliding mode vector—have to be predefined

where

where both
Differentiate

Substituting equation (9) into equation (18) yields

In order to achieve the super-twisting sliding mode control design, the first step is to calculate the relative degree of the dynamics equation (14) with respect to the control input. From equations (16) and (19), we obtain

From equation (20), it is apparent that the relative degree of
Super-twisting sliding mode control design
Let

where
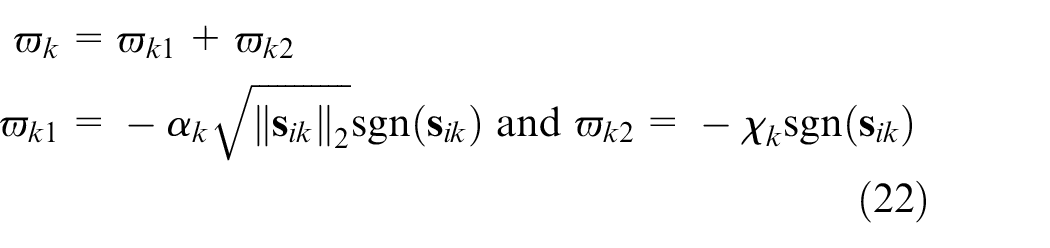
In equation (21),

Note
where
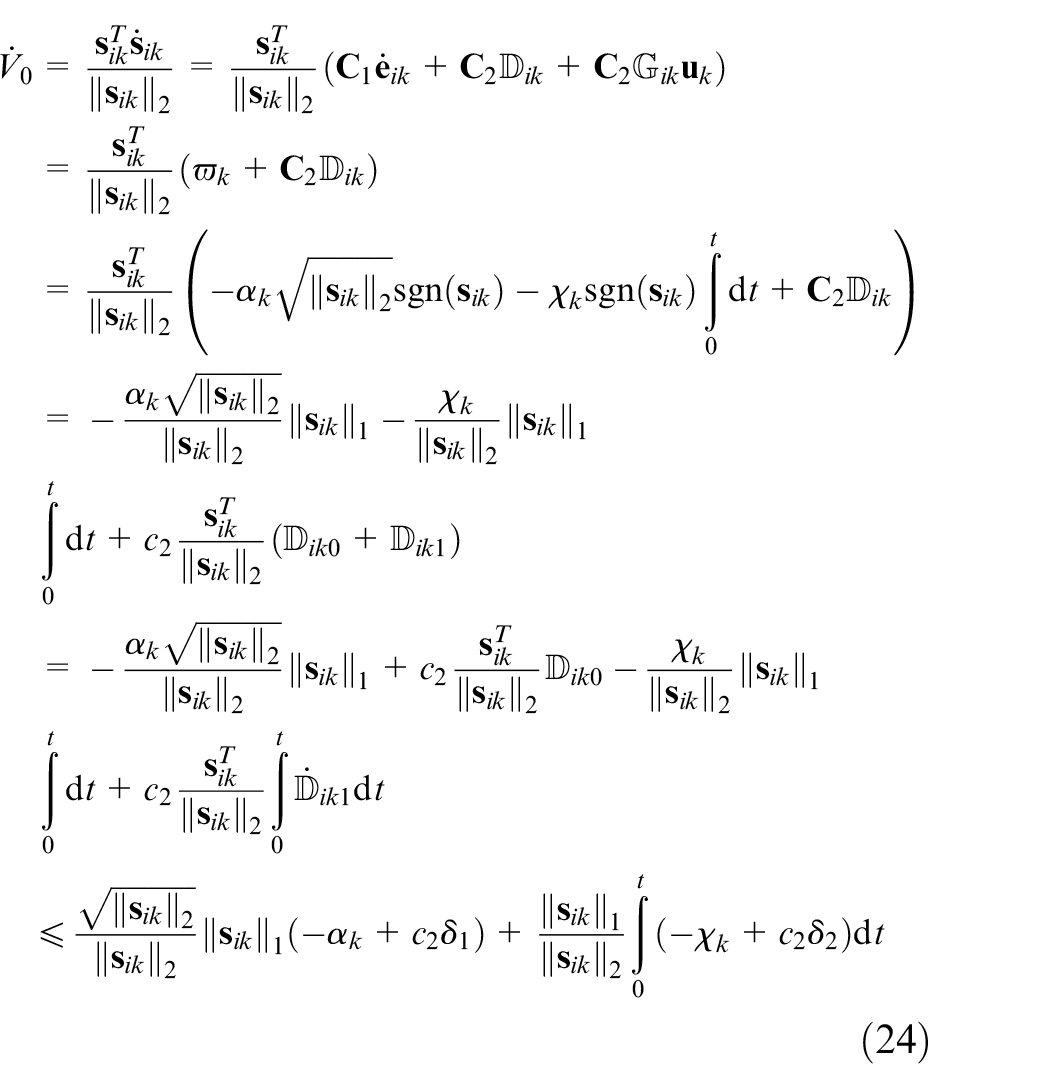
Concerning equation (24), one can have
Design of disturbance observer
From equation (12), it is apparent that
Assumption 2
Compared with the dynamic characteristics of the disturbance observer, the change rate of the time-variable component
The fulfillment of the disturbance observer needs to define the observer dynamics so that we define the disturbance observer as
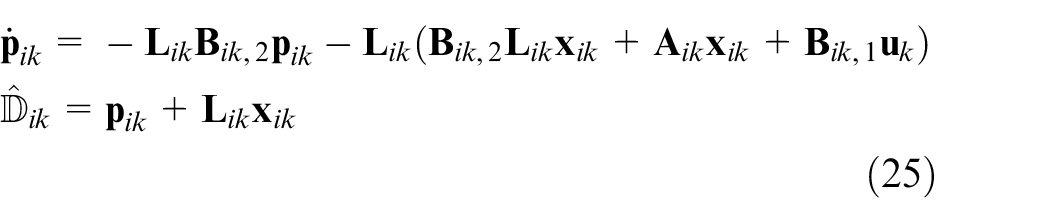
where
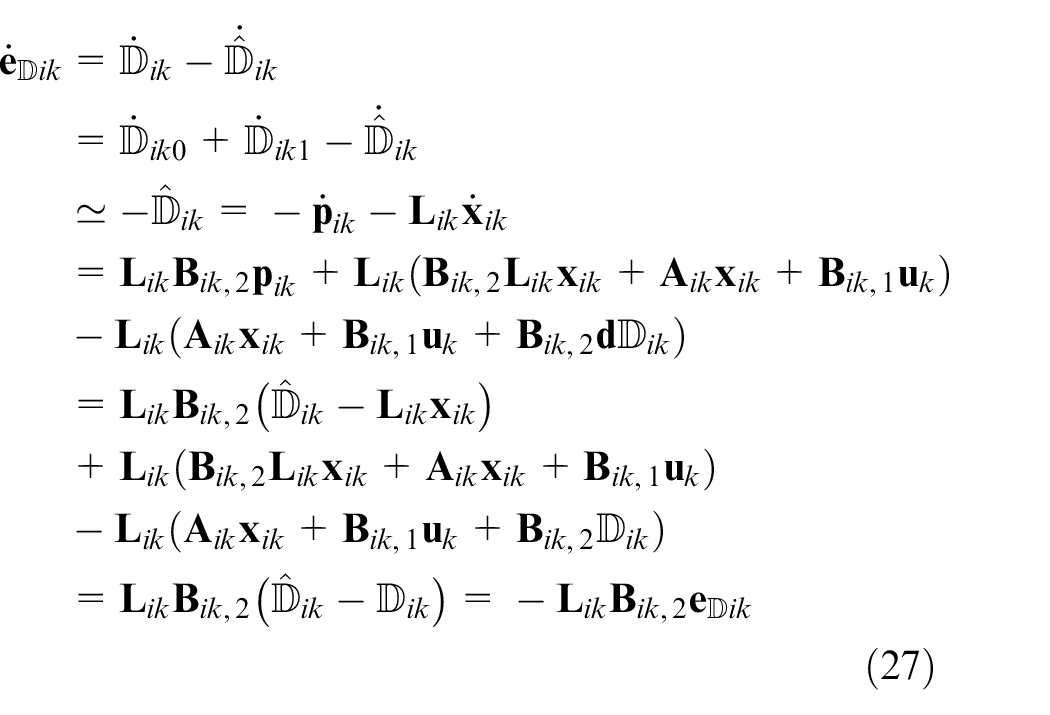
Now, let us consider the observer stability. This disturbance observer is employed to estimate the disturbances and uncertainties so that the estimate errors are adopted to evaluate the observer stability. Define the estimate error vector as

On Assumptions 1 and 2, the time derivative of
The solution of

In equation (28),
Super-twisting sliding mode control via disturbance observer
With regard to the disturbance observer,
Assumption 3
The estimate error vector
In order to integrate the super-twisting sliding mode control method and the disturbance observer technique, we revise the sliding surfaces equation (16) and introduce the estimate vector

In equation (29), differentiate

Substituting the formation dynamics equation (9) into equation (30) yields

Select the super-twisting sliding mode control via the disturbance observer as
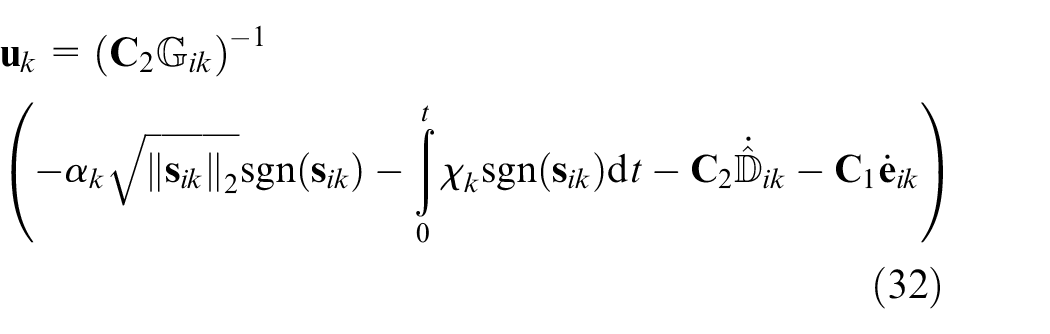
where
Replacing
Theorem 1
Concerning the leader–follower pair, its formation dynamics on Assumptions 1, 2, and 3 are determined by equations (9) and (13), its disturbance observer is designed by equation (25), its sliding surface vector is described by equation (29), and its super-twisting sliding mode control law via the disturbance observer is given by equation (32). Then, the closed-loop control system of this pair becomes asymptotically stable despite the uncertainties and disturbances if equation (34) holds true

Proof
Similarly, we also pick up the Lyapunov function as equation (23), differentiate it with respect to time, and replace the time derivative of
From equation (27), there exists

Substituting equation (36) into equation (35) yields
According to equation (26) and the concepts of vector norm, equation (37) can be written by
Concerning Assumption 3, equation (38) has the form of
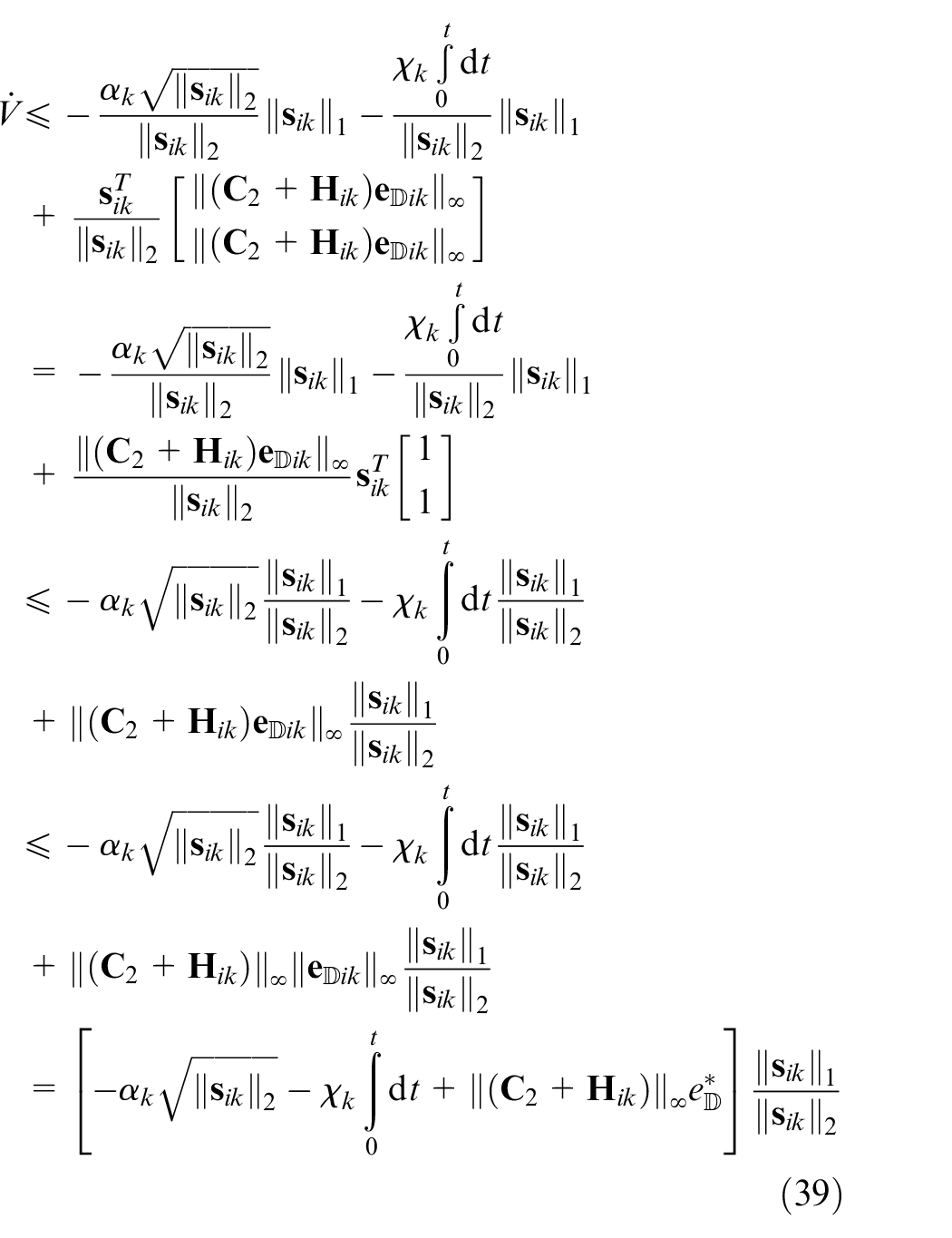
In equation (39), we will have
Compared with equations (24) and (39), both of
Finally, the structure of the closed-loop formation system is displayed in Figure 3. From Figure 3, it is apparent that both the sliding surface vector and the observer employ the states of the formation dynamics to calculate the sliding surfaces and the disturbance estimation, and that they feed the super-twisting sliding mode controller located at the feedback channel to achieve the formation task.
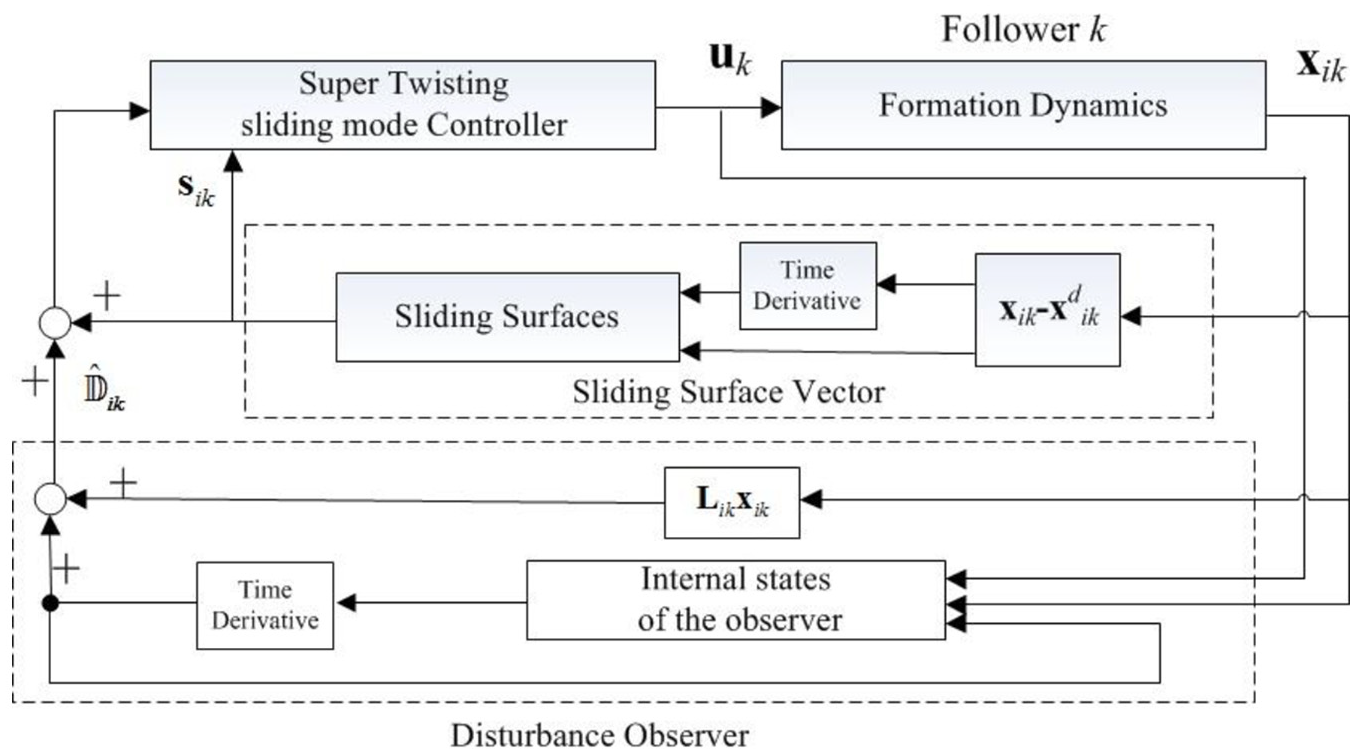
Structure of the disturbance observer–based super-twisting sliding mode control system.
Simulation results
Platform
This section will integrate the super-twisting sliding mode control method and the disturbance observer technique for an uncertain multi-robot system. In order to verify the presented method, we only consider the small-scale formation so that a multi-robot simulation platform with three mobile robots is taken into consideration. The Robot 1 acts as the leader, the Robot 2 and the Robot 3 act as the followers, and there are two leader–follower pairs in this platform. The two followers are coordinated by the leader. In the small-scale multi-robot system, some assumptions such as no collisions and no communication delay can easily hold true so that we can focus on the formation control design and investigate the feasibility of the disturbance observer–based super-twisting sliding mode control method.
The diameter of these robots is set to 0.10 m. This size is large enough for the robots to carry some sensors. The uncertainties in each robot are set by

where
Equation (9) contains


As far as the formation tasks of this multi-robot system are concerned, the leader takes charge of tracking a desired trajectory while the two followers keep the desired relative distance and the desired relative bearing angle with respect to the leader. Shown in equation (9), the designed control method is applied to the followers that fulfill the formation tasks. Meanwhile, the leader just tracks and maintains a desired trajectory regardless of the followers.
In general, the same parameters of the super-twisting sliding mode control and the disturbance observer are chosen for the two followers. Considering the super-twisting sliding mode control, the parameters are determined by

Simulations
Triangular formation moving along a straight line
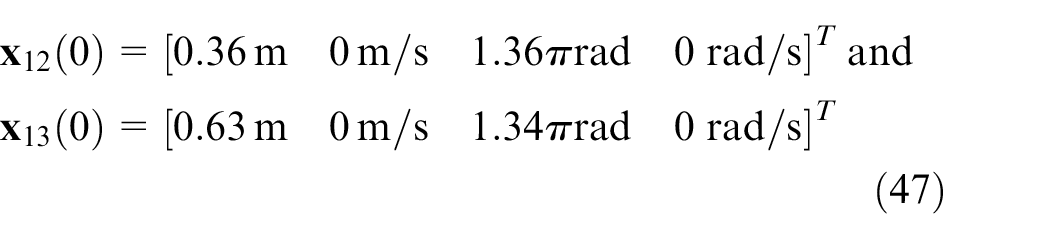
In Figure 4, the multi-robot platform carries out the task of triangular formation when moving along a straight line trajectory, in which the red means the leader robot and the green and the blue delegate the two followers. The initial postures of the three robots are allocated at
According to the initial postures equation (43) and the formation task, the initial states of the formation dynamics equation (13) can be calculated as
In accordance with the formation task, the desired states can be determined by

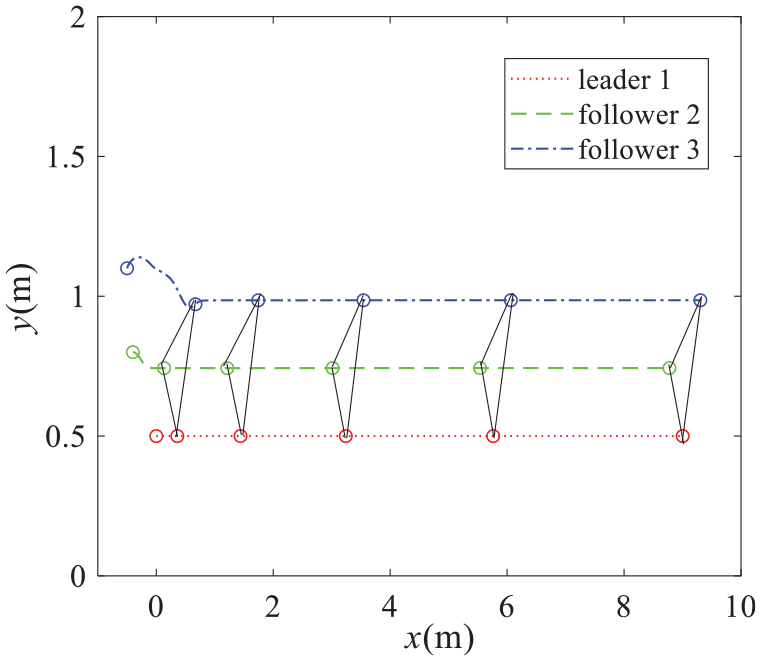
Triangular formation of the multi-robot system while moving along a straight line.
Figure 5 demonstrates the state variables when the multi-robot system fulfills the formation task in Figure 4. For the purpose of comparisons, the other two classic control methods are also implemented on the same platform to accomplish the same formation task besides the presented integration (short for ST-SMC-DoB in Figure 5). These control methods are listed as the sliding mode control with disturbance observer 18 (short for SMC-DoB in Figure 5) and the sole super-twisting sliding mode control without ELM (short for ST-SMC in Figure 5). From Figure 5, the presented method can improve the performance of the system state variables. Note that the sole super-twisting sliding mode control is with the same sliding surfaces formulated by equation (11). From this aspect, the disturbance observer technique can benefit the improvement of the control performance.
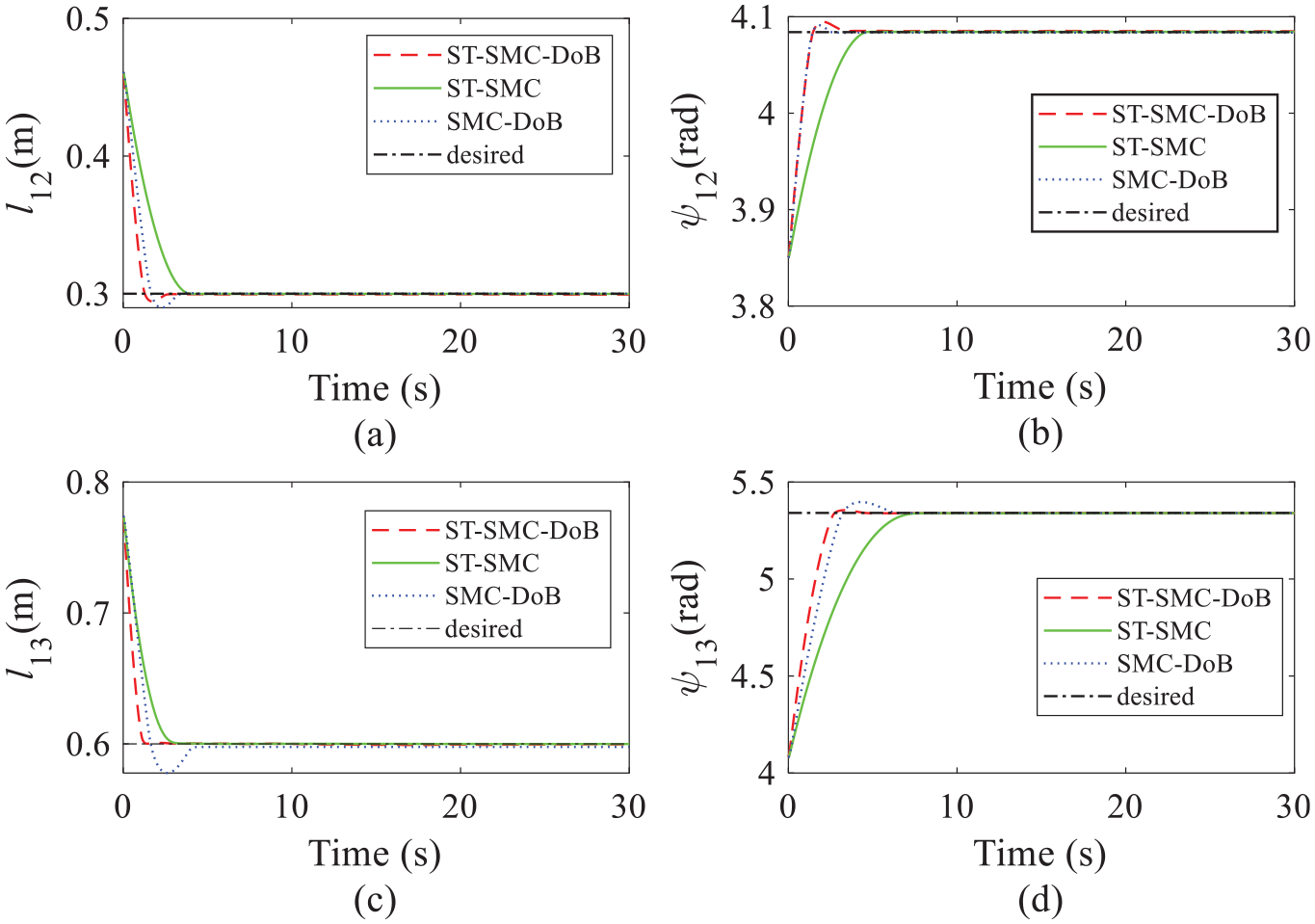
Comparisons of the state variables by different methods: (a)
The control inputs of the three control methods applied to the follower 2 and the follower 3 are illustrated in Figures 6 and 7, respectively. In Figures 6 and 7, the presented method can decrease the chattering phenomenon effectively. In theory, the integrated method can compensate the disturbances and uncertainties entering the formation control system.
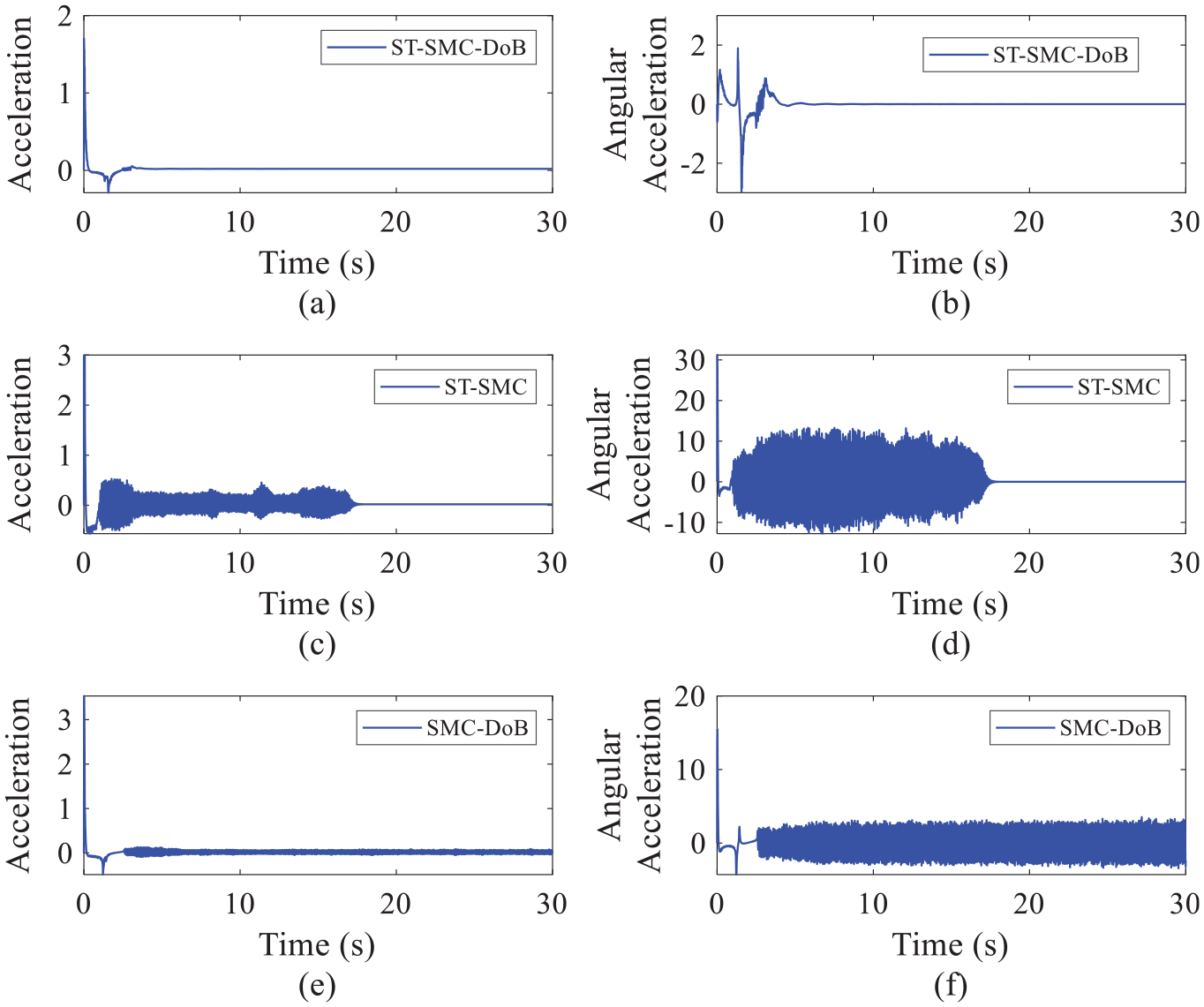
Comparisons of the control inputs from the follower 2: (a) acceleration by the ST-SMC-DoB, (b) angular acceleration by the ST-SMC-DoB, (c) acceleration by the ST-SMC, (d) angular acceleration by the ST-SMC, (e) acceleration by the SMC-DoB, and (f) angular acceleration by the SMC-DoB.
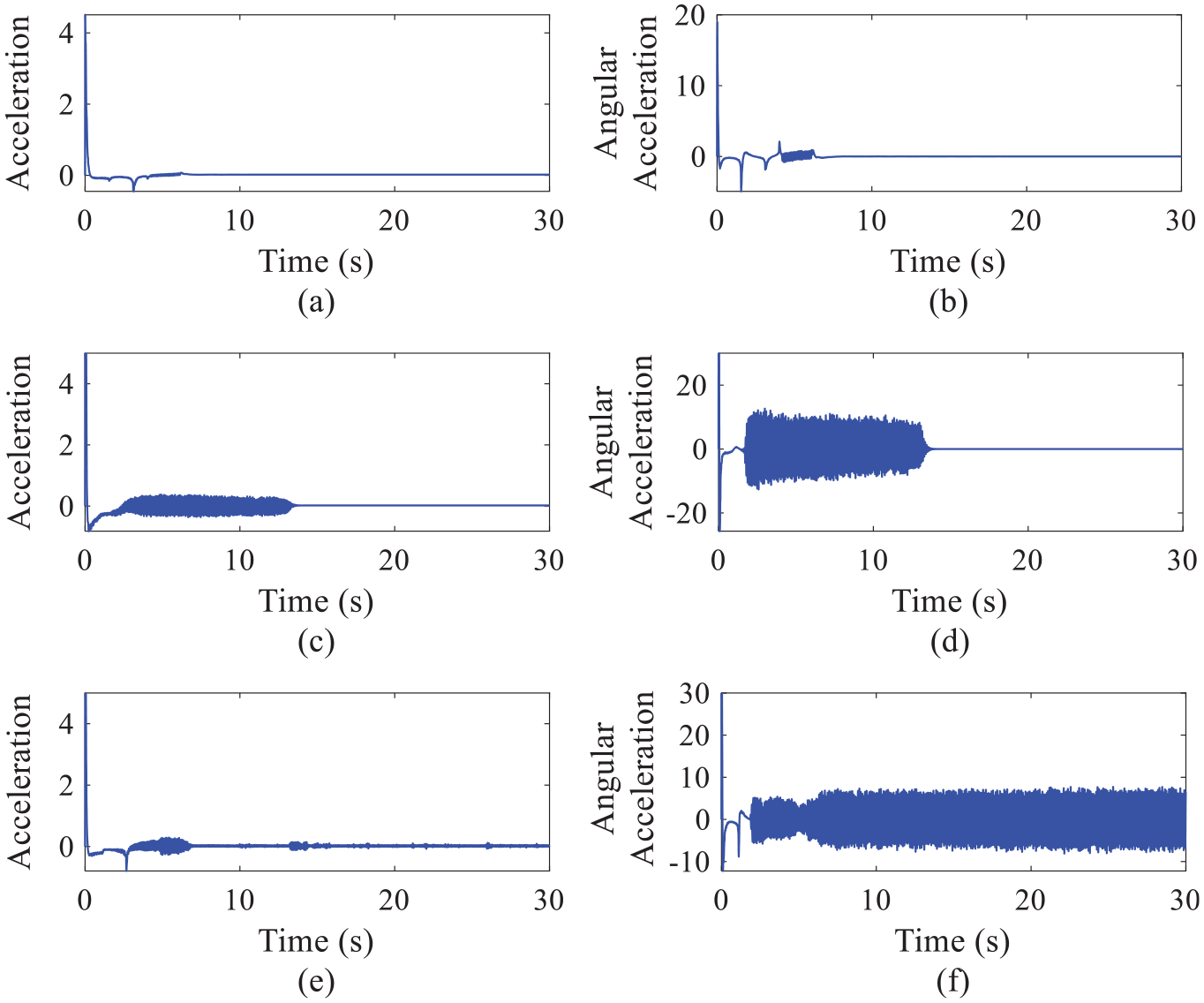
Comparisons of the control inputs from the follower 3: (a) acceleration by the ST-SMC-DoB, (b) angular acceleration by the ST-SMC-DoB, (c) acceleration by the ST-SMC, (d) angular acceleration by the ST-SMC, (e) acceleration by the SMC-DoB, and (f) angular acceleration by the SMC-DoB.
Figure 8 illustrates the sliding surfaces. The estimations of uncertainties and the estimation errors are illustrated in Figures 9 and 10. Proven in Theorem 1, the formation control system is asymptotically stable. From Figure 10, we know the errors are large at the outset, but they are dramatically decreased with respect to time.
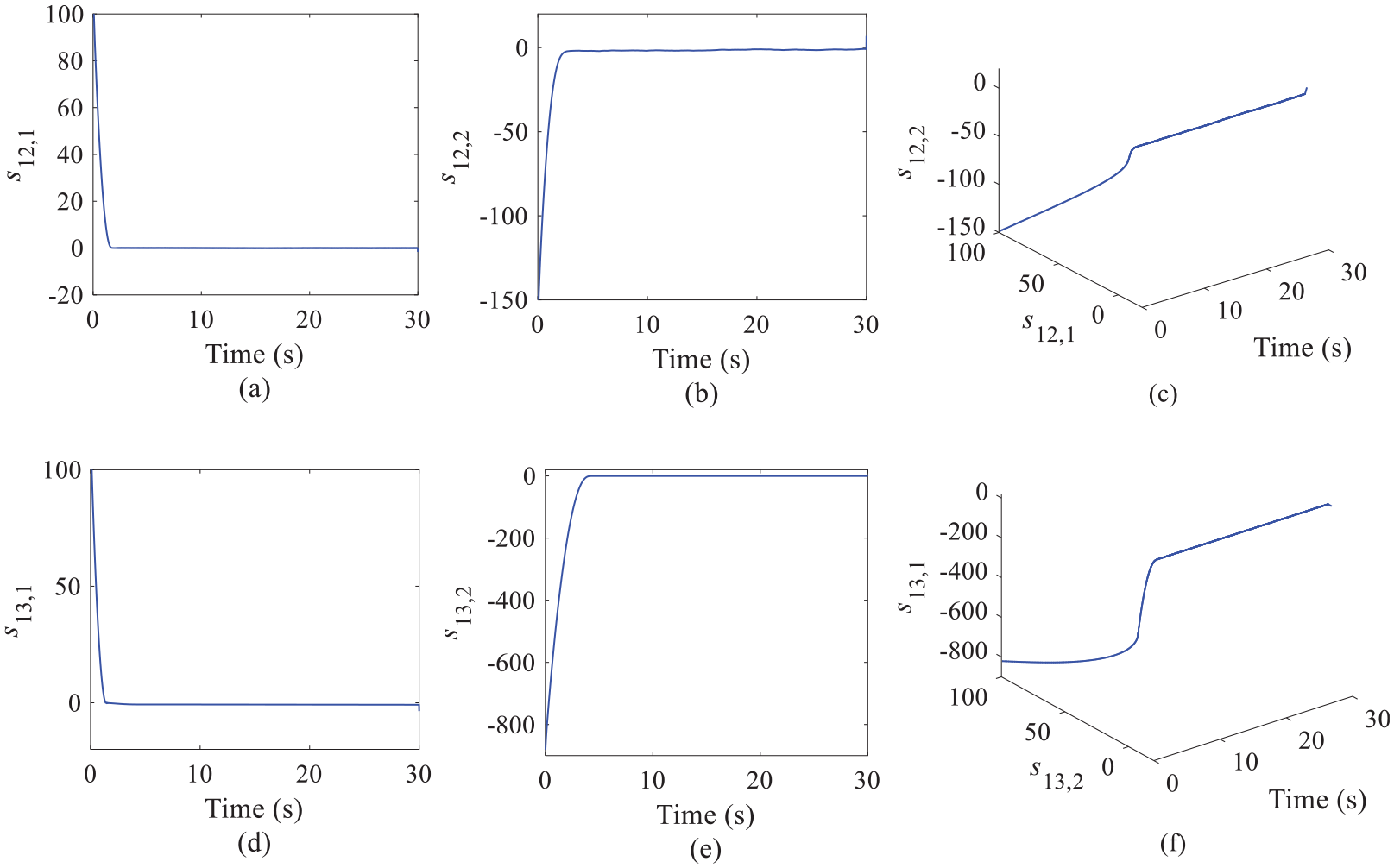
Sliding surfaces of the two followers: (a)
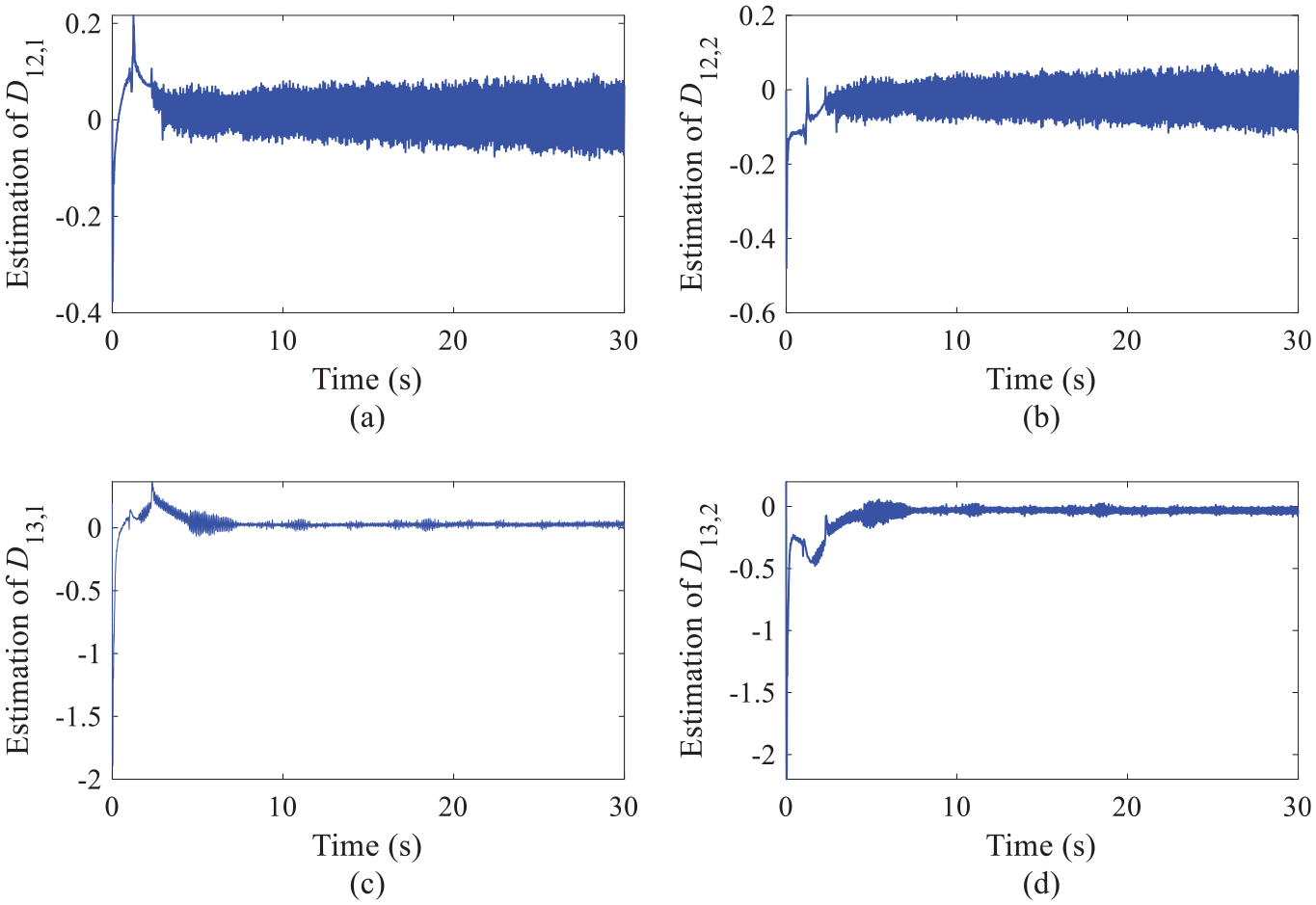
Disturbance observer outputs of the two followers: (a) estimation of
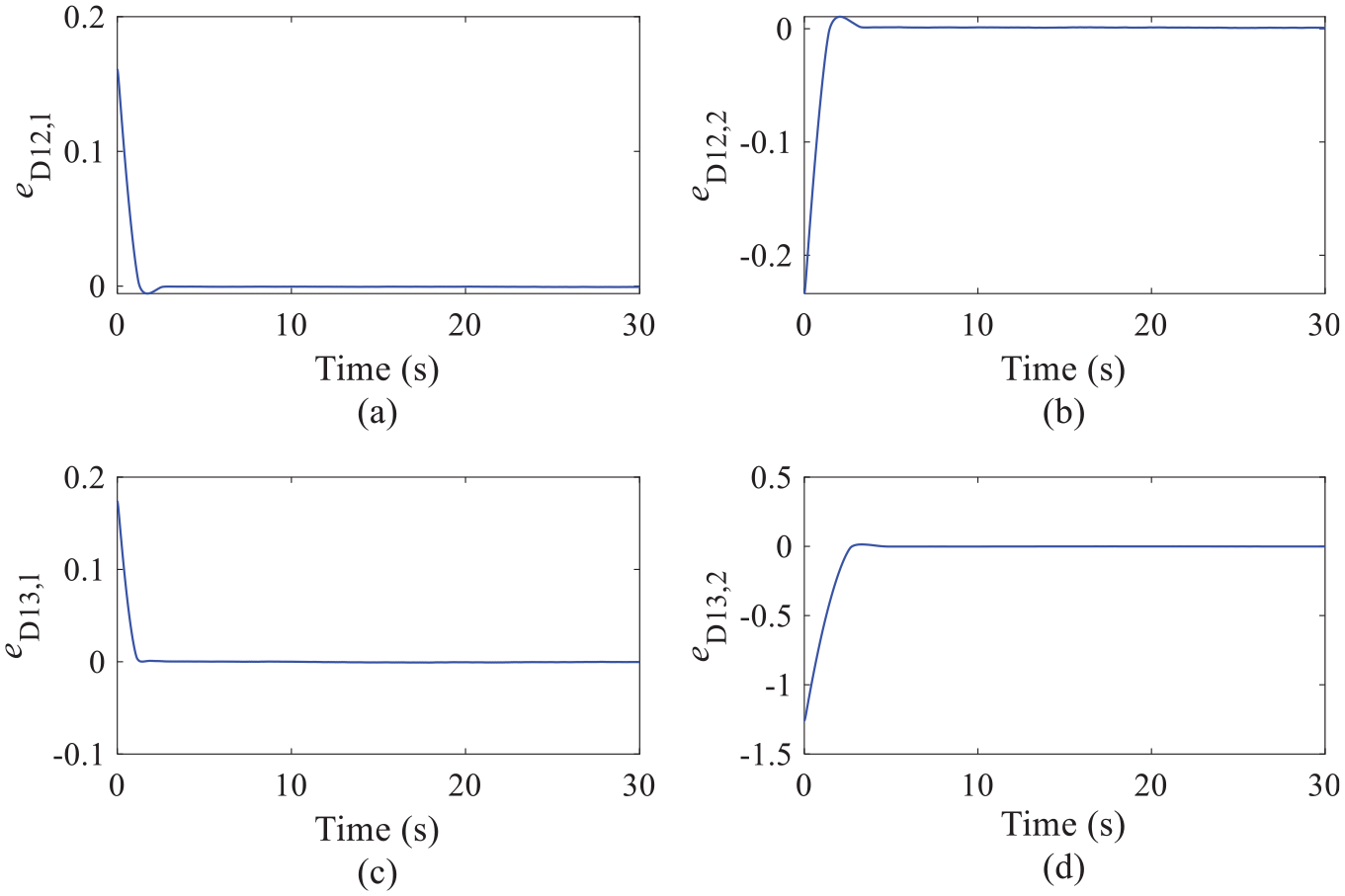
Estimation errors of the disturbance observers for the two followers: (a)
Triangular formation moving along a circular trajectory
This platform in Figure 11 forms up a triangle when moving along a circular trajectory. Both the super-twisting sliding mode control parameters and the ELM parameters are kept unchanged. They are the same as the formation task in Figure 4. Concerning this task, the initial postures of the three robots are set by
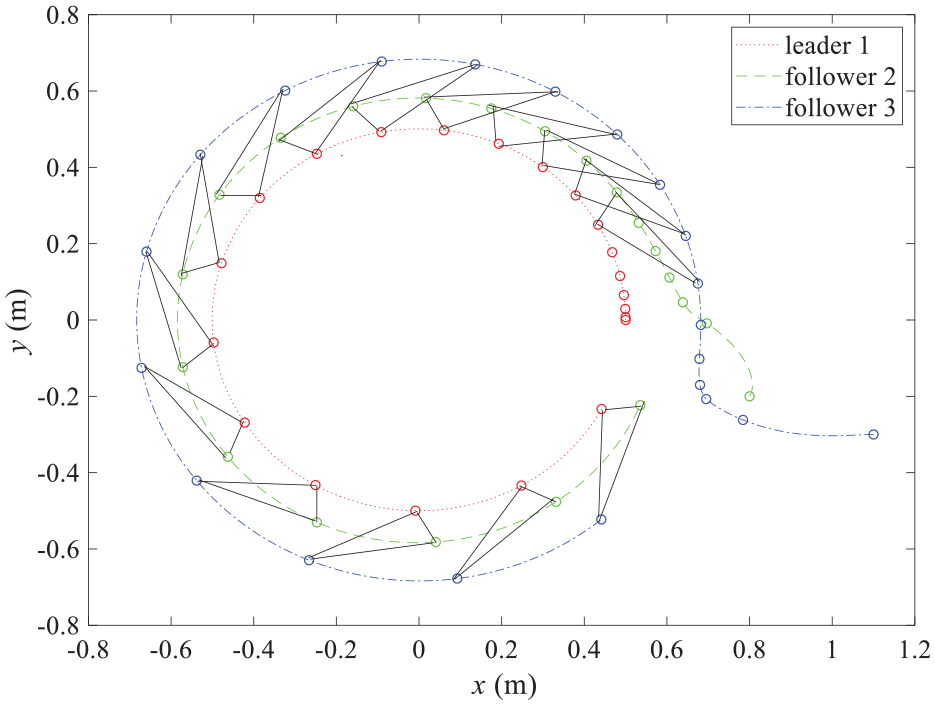
Triangular formation of this multi-robot platform when moving along a circular trajectory.
According to this control task and the initial postures, the initial states of the formation dynamics can be calculated by
Similarly, the desired states can be obtained on account of the leader’s trajectory

The state variables and the control inputs are also similar to the formation task in Figure 4 as proven in Theorem 1 so that these curves are not be demonstrated, owing to the limited space.
Triangular formation moving along a U-shape trajectory
This platform in Figure 12 forms up a triangle when moving along a U-shape trajectory. Both the super-twisting sliding mode control parameters and the ELM parameters are kept unchanged. They are the same as the formation task in Figure 4. Concerning this task, the initial postures of the three robots are set by
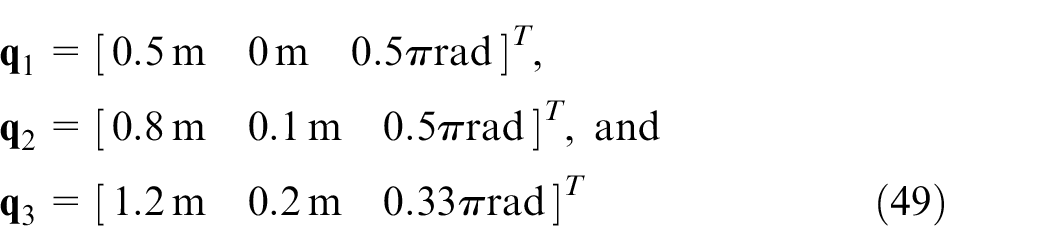
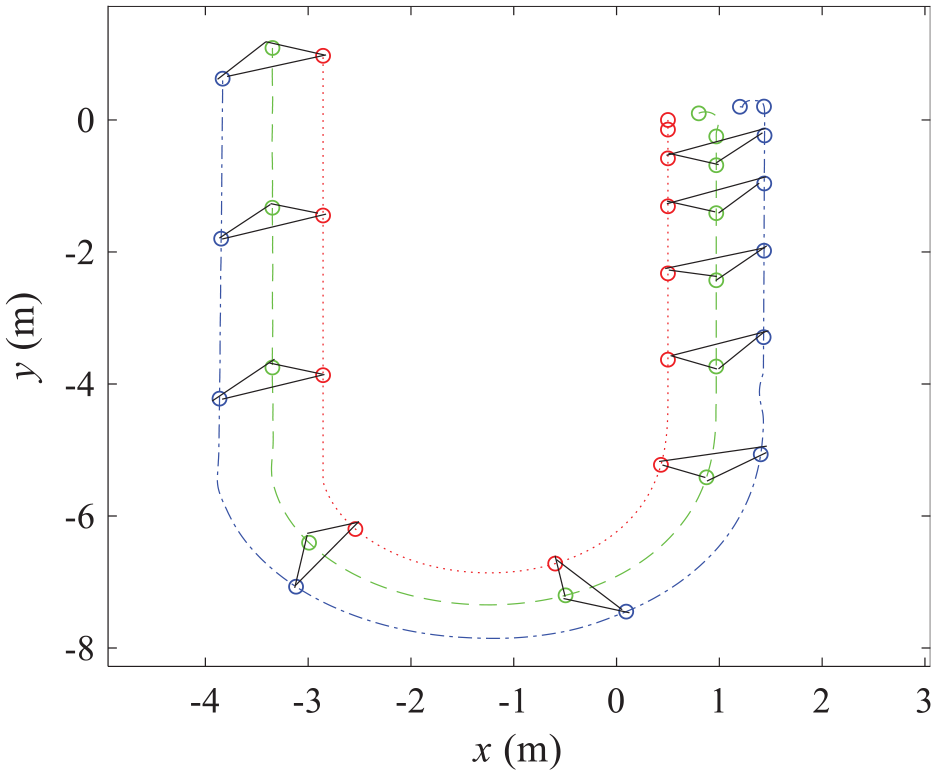
Triangular formation of this multi-robot platform when moving along a U-shape trajectory.
According to this control task and the initial postures, the initial states of the formation dynamics can be calculated by
Similarly, the desired states can be obtained on account of the leader’s trajectory

The state variables and the control inputs are also similar to the formation task in Figure 4 as proven in Theorem 1 so that these curves are not be demonstrated, owing to the limited space.
Conclusion
This paper has investigated the formation control problem of multi-agent mobile robots. In order to fulfill the formation task and resist the inevitable uncertainties and disturbances, the super-twisting sliding mode control method is adopted, which suffers from the overestimate of the control gains. Motivated by the improvement of the formation performance, the disturbance observer technique is deduced. Theoretically, the integration of the super-twisting sliding mode control and the disturbance observer for the formation maneuvers has the guaranteed stability in the sense of Lyapunov. In reality, the method is applied to a multi-robot platform with three mobile robots. Some comparisons via other two control methods have been illustrated, that is, the sliding mode control with disturbance observer and the sole super-twisting sliding mode control. Although all the three methods can realize the formation tasks, the numerical results demonstrate that the integrated method has the best performance. This method can be a solid support to deal with the formation maneuvers of multi-agent mobile robots.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by BJNSF(L191021) and National Science and Technology Major Project(2017-I-0006-0007).