
Abstract
A high-order bilateral consensus robot formation control protocol for multi-agent systems is proposed in this paper. Considering the relationship between the state of the information exchange topology and derivatives, a third-order bilateral consistency protocol is presented and is extended it to a higher order bilateral consensus protocol. First, sufficient conditions for the third-order multi-agent system are given to achieve the bilateral consensus control protocol, and the system’s asymptotical stability is also achieved by adjusting the feedback system gain parameters. Then, by further studying the cohesive relationship between each state variable of the third-order protocol and the gauge transformation, the sufficient conditions of the higher order system are also provided. Finally, by applying the third-order control protocol to the control of multi-robot formation, the general control scheme of robot formation is given and the control of robot formation is successfully achieved.
Introduction
In the process of continuous research and exploration in the field of robotics, researchers have gradually found that it is difficult to use a single robot system to operate in more complex working environments. Therefore, the development of multi-robot systems has gradually become a focus of attention focus for scholars and experts. With the continuous development of the modern robot industry, multi-robot systems are increasingly exhibiting unique advantages over single robot structures. Multi-robots work together to accomplish complex mission objectives, that have been widely used in the field of robotics, such as coordinated cargo transportation and intelligent assembly, multi-robot automated welding, and the cooperative work of spacecraft in the space field.1,2
In the field of multi-robot research, the realization of multi-robot motion control via robot formation control has become a key issue. Many experts and scholars have conducted relevant research in this field. Lee and Chong 3 proposed a robotic cooperative control formation with an anonymous nature. Garrido et al. 4 applied the Voronoi Fast Marching (VFM) method to the path planning of robot formations. Scheggi et al. 5 achieved the control of robot formation via a visuo-haptic feedback mechanism. Aiming at the robotic avoidance obstacle problem, Nascimento et al. 6 established a nonlinear multi-robot prediction model to achieve the control problem of robot formation. Xing et al. 7 implemented distributed robot formation control by establishing a multi-robot model with nonholonomic constraints. Wang et al. 8 mainly studied the control of robotic formations based on visual leader-followers in an unknown complex environment.
In the actual application process, asymptotical stability in the multi-robot system can be more easily achieved by combining the consensus protocol with the robot formation. Furthermore, the research and application of consensus issues have been of concern for many scholars. In the process of continuously exploring the formation control method of robots, many studies have shown that the consensus control theory of robot formation has strong stability and applicability compared with other theories. Xing et al. 9 proposed a distributed observation protocol for nonlinear dynamics, which transformed the formation tracking problem of multi-robot systems into a time-varying consensus problem. Sun et al. 10 introduced a novel amplitude-saturated output feedback (OFB) control approach for underactuated crane systems that exhibited double-pendulum effects. Liu et al. 11 concentrated on the problem of finite-time fault-tolerant control for a class of switched nonlinear systems in lower triangular form under arbitrary switching signals. Tian et al. 12 investigated multi-agent systems with second-order dynamics and antagonistic interactions under both absolute and relative damping protocols. In addition, Nazari et al. 13 converted the consensus problem into a local stability problem of error dynamics, evaluated its stability with the infinite dimension Floquet method, and applied it to the consensus control of space multi-spacecraft formation.
The high-order consensus problem has also been an important component of the research of many scholars. With the increasing requirements for multi-agent control in recent several years, the development and design of a reasonable and highly reliable control method has become necessary. High-order linear consensus agent systems with dynamics, high-order consensus protocols with fixed and switching topologies, and high-order consensus network control with continuous time for communication delays have also been studied by Wieland, 14 Jiang 15 and Lin. 16 Khoo et al. and Chen et al., respectively, proposed the multi-surface sliding control and adaptive backstepping tracking control theories with semi-strict feedback multi-agent systems for higher order nonlinear agent systems.17,18 Furthermore, the relevant stationary average consensus control theory for high-order, multi-agent systems applied to spacecraft was proposed by Rezaei, 19 and the self-triggered leader-following consensus protocol was also studied by You et al. 20
Although multi-robot formations and consensus issues have been recently investigated by numerous scholars, most research has focused on independent robot formations or consensus issues. This limits the application of the results of consensus research to a certain extent and also results in a lack of theoretical support for the research of robot formation. Some scholars have gradually discovered this problem throughout the course of research. They combined multi-robot formation with the second-order consensus problem and expanded the application of consensus research to multi-robot formation; the consensus research was limited to the exploration of two variables, such as the position and velocity of the robot. However, in the process of actual robotic movement, the control of multi-robot formation is by two variables that lack certain constraints and control accuracy. Furthermore, in the present study, to expand the control performance of the second-order system, an acceleration control variable is added, the second-order system is extended to a third-order system, and the control protocol of the high-order system is given, which further improves the control stability of the multi-robot formation. In addition, a large amount of simulation data and research results demonstrate that, via the interaction of positive and negative weights between agents that are both cooperative and antagonistic, the bilateral third-order consensus control protocol enables the robot formation to achieve consensus from two directions. This improves the control efficiency of the robot formation, facilitates the simplification of the algorithm, and expands the applicability of the protocol in multi-robot formation. Nevertheless, some disadvantages exist in high-order bilateral consensus; for example, the weight value cannot be too large, and the interference of communication delays may cause the divergence or oscillation of the network system.
This paper will combine these main results and related conclusions to study the control problems of robot formation for high-order, multi-agent systems under a bilateral consensus protocol. Considering the stability and reliability of the robot formation, a bilateral consensus protocol in the third-order state is proposed. Due to the existing relationship between cooperation and confrontation for robots, it is represented by the positive and negative weights of edges in the topological graph. To achieve the asymptotical consensus of the third-order system, by combining the concepts of graph theory and structural balance, the condition that the system has strong connectivity is given. The effectiveness and stability of the third-order system are proven via analysis of the Laplacian matrix eigenvalues and system gain parameters. For the more complex high-order systems, by simplifying the conditions for achieving the asymptotical consensus and by means of the properties and conclusions of the complex coefficient polynomials, the research in the complex domain is transformed into the real number domain, and the relevant evidence is presented. Furthermore, in this paper, the third-order protocol is applied to the control of robot formation to solve the problem of multi-robot cooperative operation consensus.
The remainder of this paper is structured as follows: Section “Precondition statement” provides a graphic description of the high-order consensus protocol and a statement of structural balance. Section “Main results” presents a bilateral consensus protocol in a high-order state and elaborates on the main results and the proof. Section “Robotic formation operation control” presents simulation analysis based on the protocol proposed in this paper. Section “Conclusion” summarizes the research results.
Precondition statement
Graphic theory
Let
A directed path for

Each node
Definition of balanced structure
Let
Lemma 1
Provided the diagraph
If
Lemma 2
Saber
22
defined a weighted digraph

Meanwhile,
Lemma 3
Saber
21
supposed there exists strong connectivity in the digraph
Main results
Control protocol with third-order bilateral consensus
In this paper, the position, velocity, and acceleration in the edge

As for system (1), the control protocol is designed by
In addition, the feedback system gains are represented by k,
Lemma 4
Provided a following third-order complex coefficient polynomial 22

then, equation (3) is steady if and only if
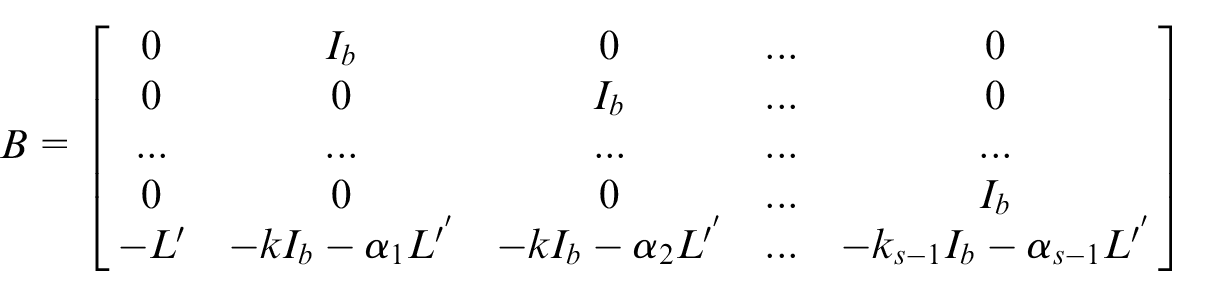
Let

and matrix

where

with
where
Assumption
For
Theorem 1
For multiple-agent coordination system (1) with dynamic continuous time, let the corresponding digraph

and
Furthermore, provided
where
Proof
Given
When
where
When
When the diagraph
Control protocol with high-order bipartite consensus
The dynamic consensus model of the s order with continuous time is given as follows

where
where we see

where
And we see

where
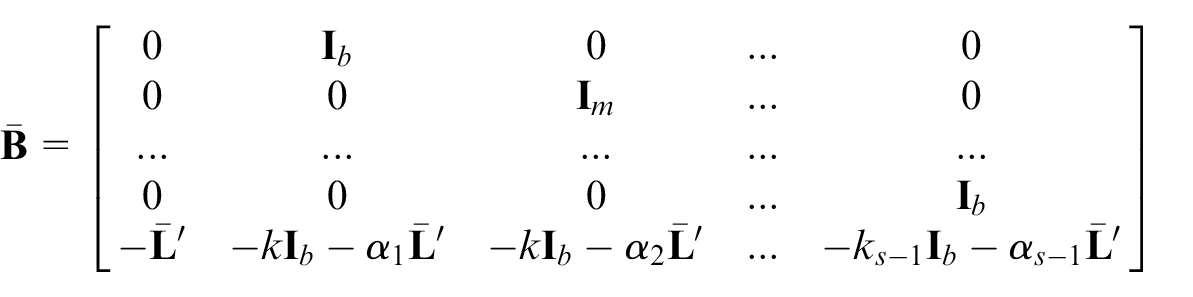
with
Note that
where
Theorem 2
A complex coefficient polynomial with a high order is defined as

In addition,

The product is
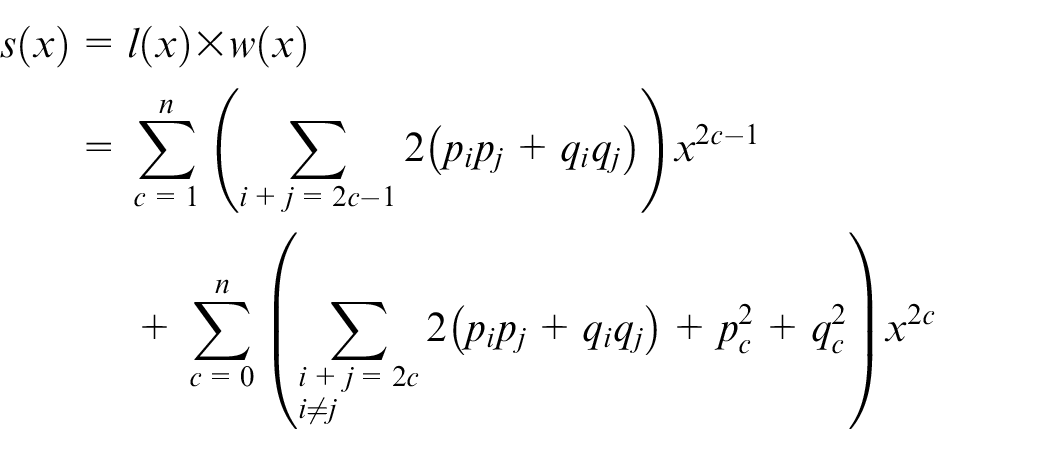
Proof
The preceding result can be proven by means of the multiplication algorithm for the polynomial with a complex coefficient; furthermore, each coefficient of
Moreover,

Lemma 5
Rogers and Owens 25 provided a control system with feature polynomial

Moreover, the control system can reach a steady state if and only if its determinant is composed of characteristic polynomials
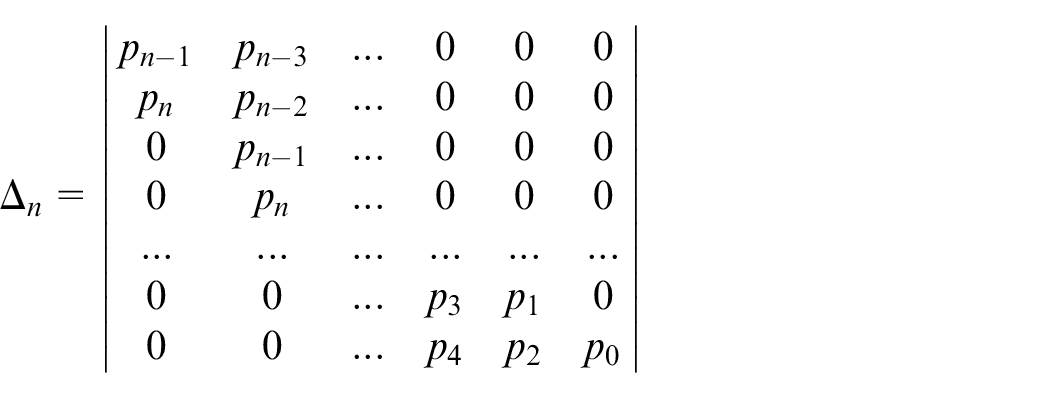
We see that the minimum value of its sequential master determinant

Theorem 2
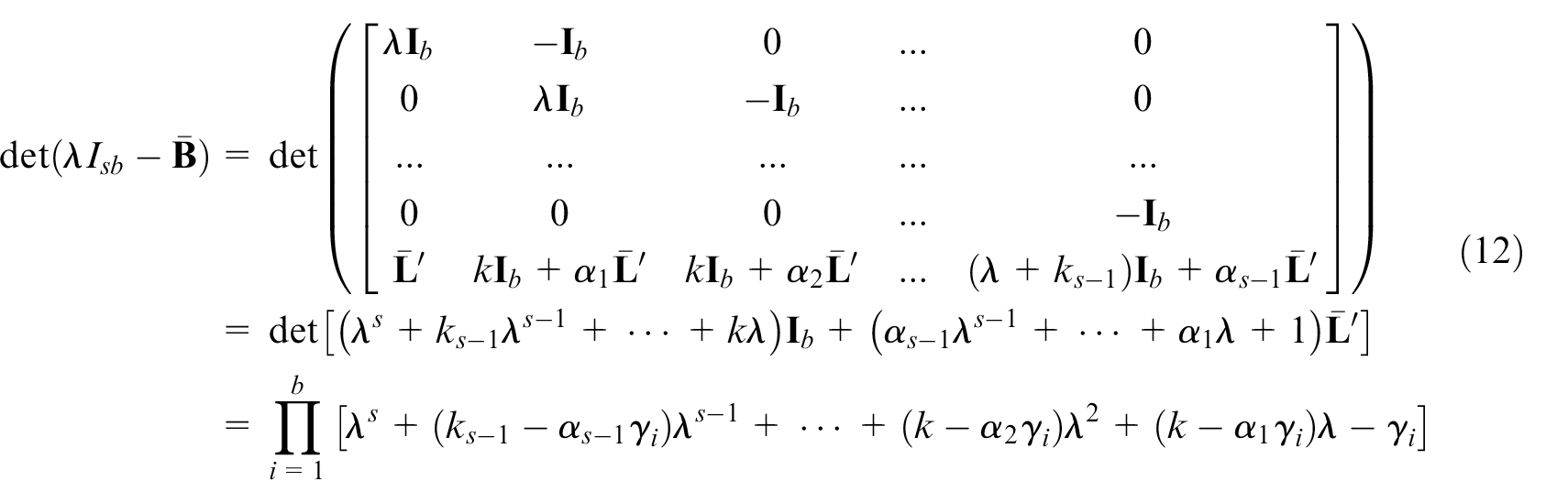
For multiple-agent coordination system (8) with dynamic continuous time, let the corresponding digraph
Proof
In Lemma 5, by means of the results from Ren and Atkins,
26
provided that the determinants and sequential master determinants of
When
Remark 1
For the proposed high-order system, its preconditions are also valid for the three-order system. However, differences in the three-order system probably exist, such as the structure of the protocol, the matrix eigenvalues, and the relevant results. Furthermore, compared with the high-order system, the three-order system is advantageous in that it has a more simple and effective judgment method. More critically, the ultimate results derived by the three-order system can be well applied to the formation control of robots and also play a role in the further comprehension and deduction of meanings about high-order systems.
Robotic formation operation control
Establishment of the robotic model
The kinematic equations of the robot are given as Altafini 21
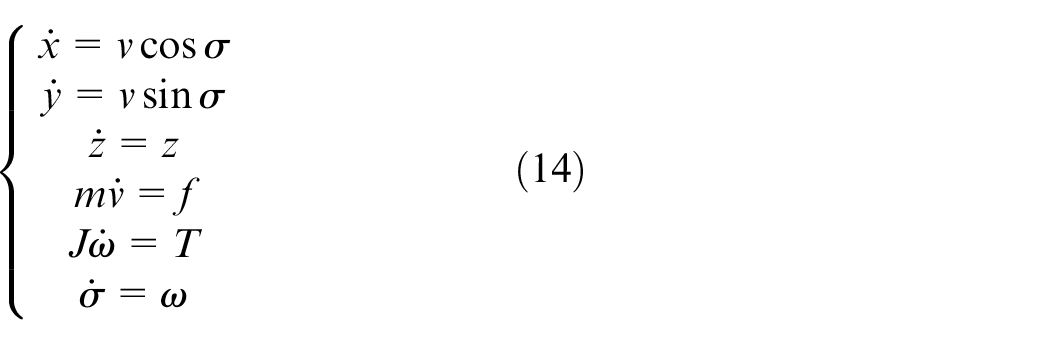
where
In addition, we define another reference which is not robotic rotating center as follows

where
On the basis of above analysis, we can obtain the motional equation as below

As follows, in our paper,
In this article, five robots are required to achieve the consensus in X, Y, and Z directions. Then, Figure 1 describes information exchange structure topology of the five robots, and the edge with directions

Communication topology.
Denote that equation (16) will be applied to ensure the desired formation of five robots.
Simulation results
The communication topology for a system composed of five robots is illustrated in Figure 1. Among them, the solid lines and the dotted lines represent the cooperation and competition relationship between the robots with weights of 1 and −1, respectively.
Let

Let
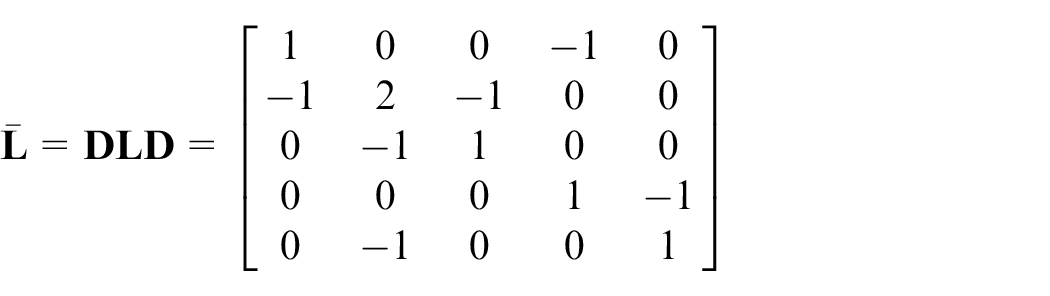
and 0 is the eigenvalue of the matrix

These eigenvectors conform to
As presented in Figure 1, the solid line between vertexes indicates that there is a cooperative relationship between agents, and the corresponding weight is taken as 1. The dotted line between nodes indicates that there is a competitive relationship between agents, and the corresponding weight is taken as −1. Let the upper bound of the time-varying delays
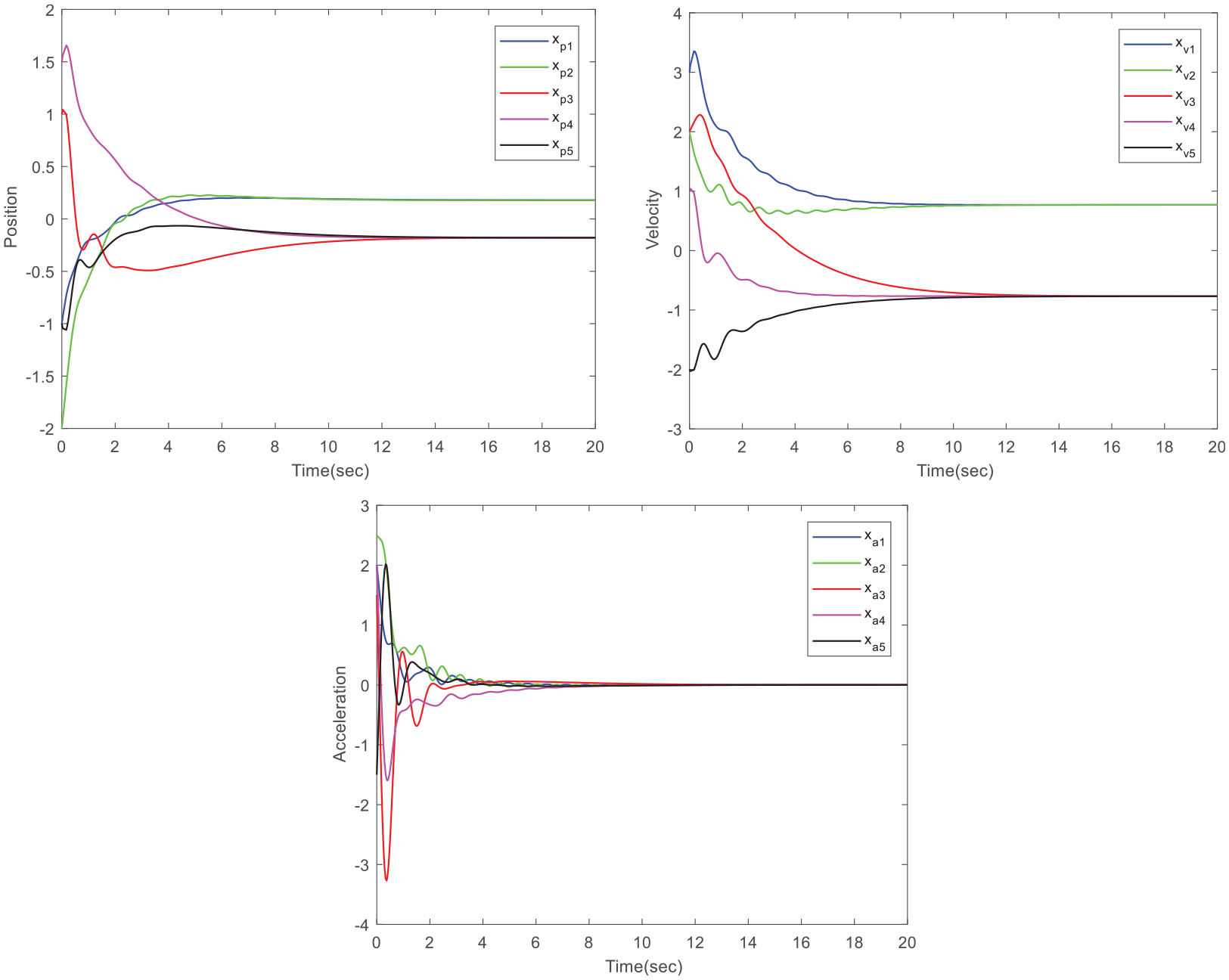
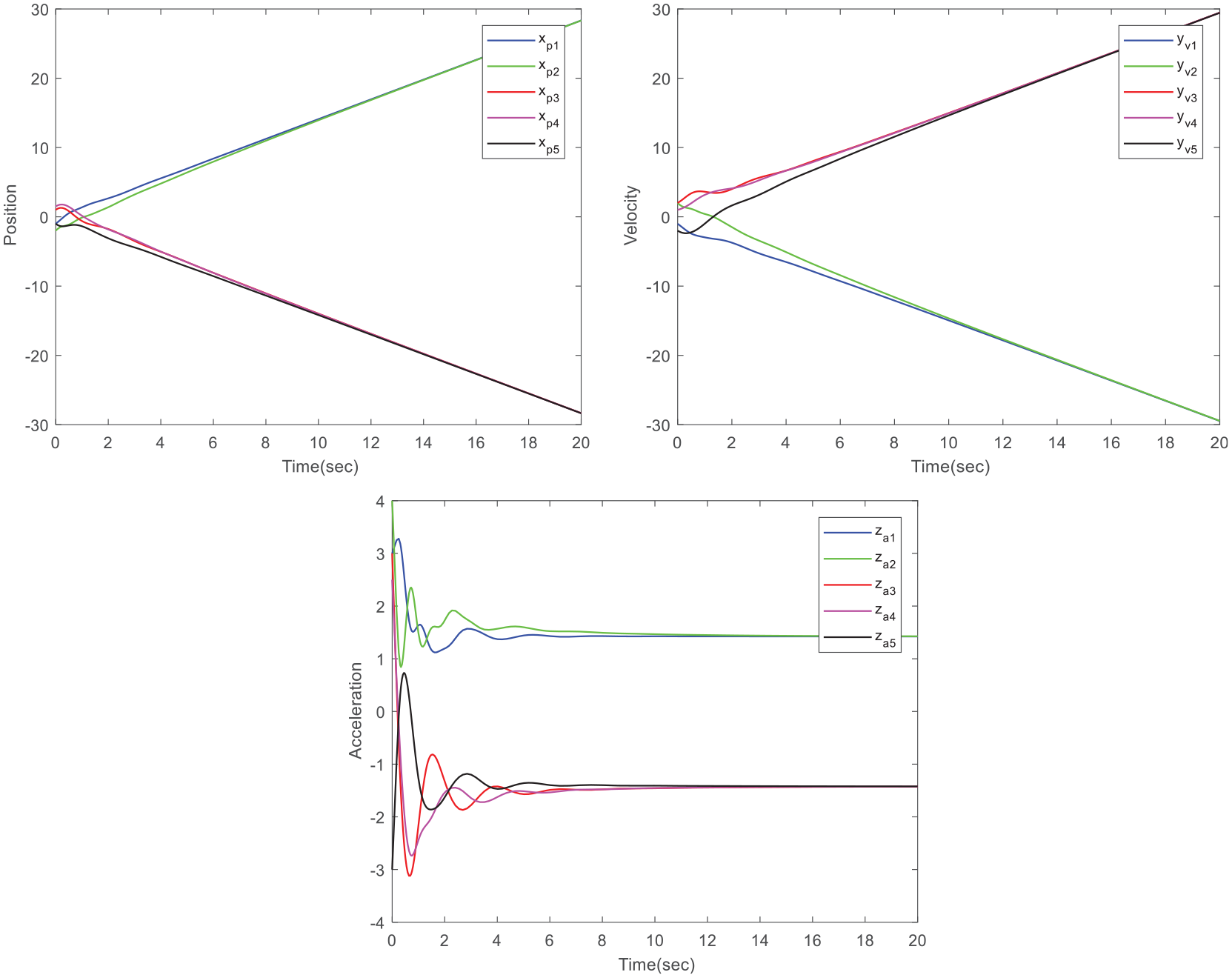
X-direction trajectories of the five robots with
Figure 3 describes the Y-direction trajectories of each robot when
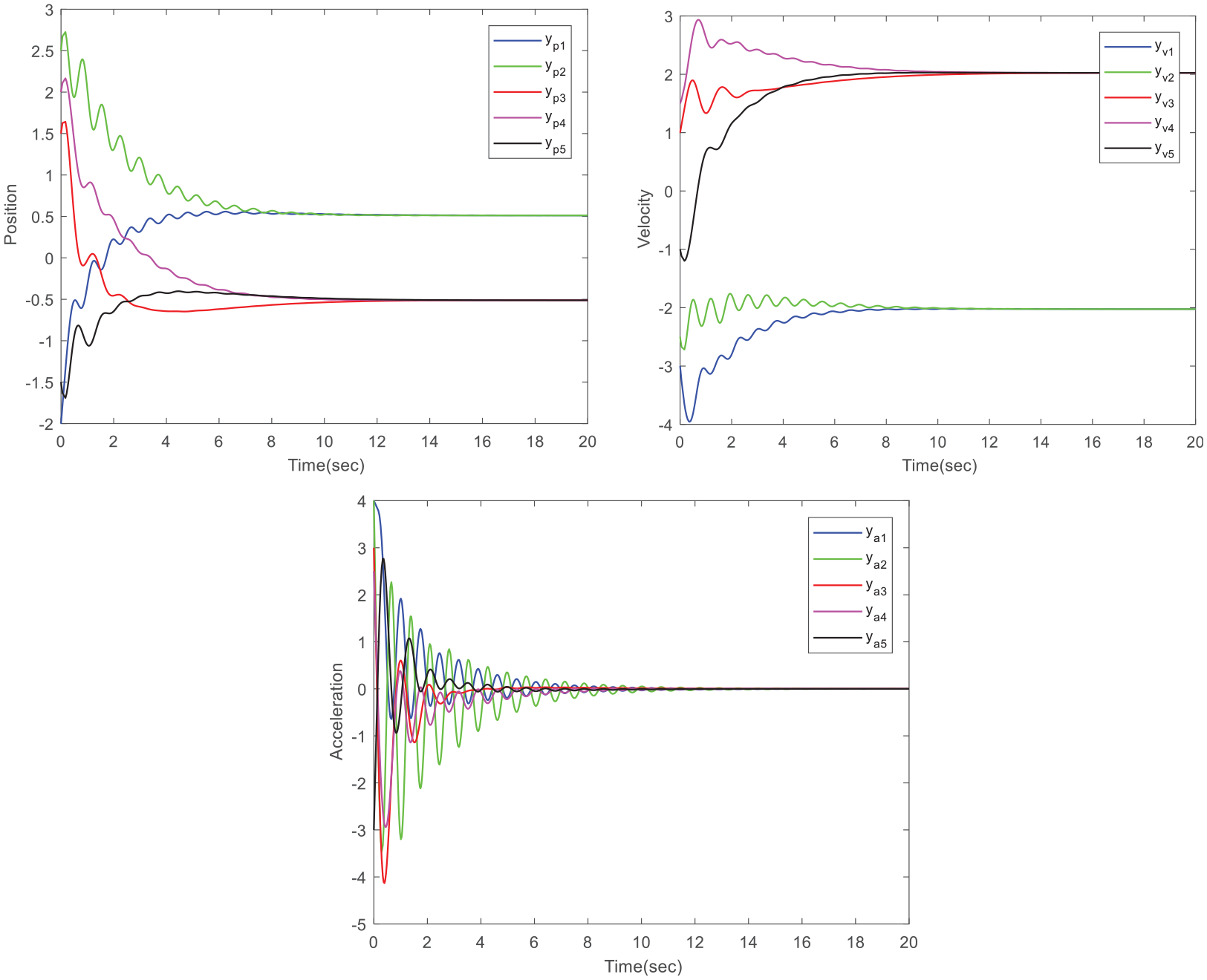
Y-direction trajectories of the five robots with
The position, velocity, and acceleration trajectories of each robot under control law (16) for Z-direction robotic trajectories of motion are illustrated in Figure 4, in which each robot of the same weight is able to reach its destination.
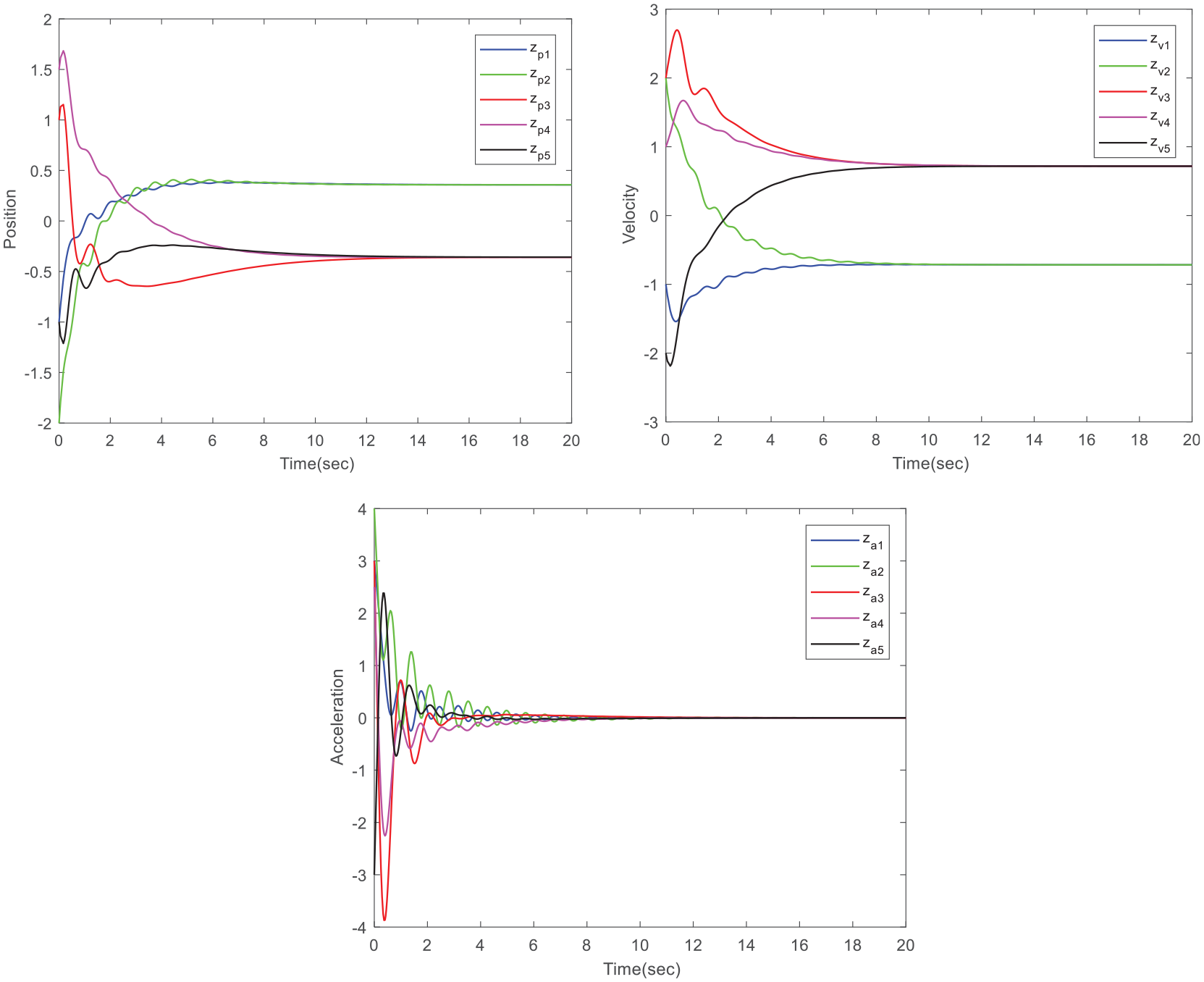
Z-direction trajectories of the five robots with
Figure 5, respectively, presents the position, velocity, and acceleration trajectories of the corresponding closed-loop system (1) under protocol (2) when
Position, velocity, and acceleration trajectories of the five robots with
It is worth noting that the simulation results presented in the four figures are closely related to the choice of the parameters k,
Conclusion
In this paper, a control protocol was proposed for a strongly connected, digon sign-symmetric structurally balanced graph with positive and negative weights under a high-order dynamics protocol. The relationship between competition and cooperation in robot formation was designed based on third-order dynamic protocols. The state values of all the edges for the third- and high-order multi-agent system were discussed in terms of the properties of feature polynomials and the sequential principal determinant. By combining the three-order bilateral consensus control protocol with the robot model, the control problem of multi-robot formation is well solved. The constraint problems of high-order systems, research on time-varying delays, and the precise control of robot formation still require further study in future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Nature Science Foundation of China under Grant 51675315, National Major Research Plan under Grant 2018YFC0604702, and Shandong Major Research Plan under Grant GG201703200116.