
Abstract
Wind energy is a useful and reliable energy source. Wind turbines are attracting attention with the dependency of the world on clean energy. The turbulent nature of wind profiles along with uncertainty in the modeling of wind turbines makes them more challenging for prolific power extraction. The pitch control angle is used for the effective operation of wind turbines at the above-nominal wind speed. To extract stable power as well as to keep wind turbines in a safe operating region, the pitch controller should be intelligent and highly efficient. For this purpose, proportional–integral–derivative controllers are mostly used. The parameters for the proportional–integral–derivative controller are unknown and calculated by numerous techniques, which is a quite cumbersome task. In this research, the particle swarm optimization technique is used but the conventional particle swarm optimization technique cannot tackle the system’s nonlinearity and uncertainties. Hence, the proposed particle swarm optimization algorithm is employed for the calculation of the controller’s optimal parameters. The proposed technique is implemented on a 5-MW wind turbine, which is designed using the Bladed software. Simulation is performed using MATLAB/Simulink to validate the effectiveness of the proposed technique. A variable wind profile is fed as input into the system and the proposed controller provides satisfactory results for the power, rotor speed, and torque. The system is stable and the settling time is reduced.
Keywords
Introduction
The world energy requirement is at its peak and increases exponentially over time. Conventional energy sources cannot fulfill the demand along with it contributing a major share in global warming and pollution. Renewable energy sources (RES) are replacing conventional sources to keep the world green and clean. Wind energy is a prominent source among RES due to its abundant nature. In the year 2020, 10% of the total world energy will be produced by wind. 1 A hybrid energy system model which also includes wind source is presented by integrating various energy storage systems. 2 Grid integration with wind turbines (WTs) as well as wind’s nonlinear nature makes the control more challenging. Maintaining power stability along with running the WT in a safe mode is quite a difficult task. The WT operation is mainly divided into three different regions according to the variable wind speed. The speed below 3 m/s is said to be in the cut-in region. The wind speed from 3 m/s to 25 m/s belongs to the normal operating region, while the region in which the speed is above 25 m/s is called the cut-out region. The WT cannot operate in the cut-in region due to economic scenarios and in the cut-out region for safety purposes. 3 At the above-rated speed, the pitch angle adjusts the blades to extract optimal power and keep the WT safe.
Multiple controlling techniques have been developed to control the pitch angle. The comparison is made between proportional–integral–derivative (PID) and H∞ controllers. 4 Nonlinearity and uncertainty affect the PID and the output is not stable. Poultangari et al. 1 suggest that at different wind profiles above rated speed the proportional–integral (PI) controllers are optimized for training the neural network. Assareh and Biglari 3 designed a neural network which is trained through PI at the below-rated speed. A nonlinear PI controller is utilized to minimize the mechanical load along with the error of generator speed. The said controller was compared with conventional PI. 5 The multi-variable control is used by combining the torque control with pitch control to extract the smooth output power. 6 The fuzzy controller is used when working with nonlinear systems and thus provided effective control for mitigating the fatigue load for WTs. 7 In industries, mostly PID controllers are used to control the system. 8 PID controllers are used in systems that have accurate mathematical models. 9 To use the PID, the parameters should be adjusted according to the system. The parameters can be found by the Ziegler–Nichols method and optimized by different intelligent techniques. 10 The combination along with the advantages of various fuzzy techniques with the PID controllers is discussed. 11 The proposed fuzzy system is designed for the constraints of PID and is compared with the simple PID controller which provides improved results. 12 Some other fuzzy controllers trained on the neural network are used to optimize the constraints. 13 In recent times, the genetic algorithm and particle swarm optimization (PSO) are widely used for the optimization of PID parameters.14,15 Macquart et al. 16 made a comparison between the single-input single-output (SISO) and the multiple-input multiple-output (MIMO) active control for the WT. The MIMO is much effective and efficient for that case. The automated voltage regulator performance is inquired through optimized fractional order proportional–integral–derivative (FOPID) control. 17 Hajiloo et al. 18 designed the FOPID and PID controllers by the multi-purpose design process. A 4.8-MW WT is tested using the fractional order proportional–integral (FOPI) control while keeping the gain constant. 19 An adaptive feedback controller is designed and the output power of the WT system is optimized by tracking the rotor speed. 20 Gambier and Behera 21 used the multi-objective PSO for the integrated pitch control system by combining the individual and collective pitch control. Jing et al. 22 employed the sliding mode control for the 1.5-MW WT to control the pitch angle and maximize the power output. Thapa Magar et al. 23 designed an adaptive controller for maximum power extraction and compared it with the PID controller. Olondriz et al. 24 implemented a feedback PI controller to decrease the mechanical fatigue load of a WT, and the controller is optimized by pole and zero optimizers. The power extracted from the hybrid energy sources such as wind and solar is optimized by employing PSO and the cost of energy is reduced. 25 The amount of RES is optimized by the addition of energy storage and demand response in the system. 26 For feedback control, the PSO methodology is applied to acquire the maximum power from wind energy. 27
This paper considers that the performance of the conventional PID controllers is not effective. Normally, the PSO-based optimization for complex systems, such as the WT, is not much accurate. Hence, there is a need to develop an algorithm that can rectify this problem and provide optimum parameters for the PID controller to regulate the pitch angle more effectively as compared to the conventional PSO. The parameters for the PID controller that need to be optimized are
Section “WT design” describes the WT components and design, section “Controller design” explains the detailed controller design and algorithms for the proposed PSO, section “Simulation results” illustrates the simulation results along with the stability of the system with the designed controller, and section “Conclusion and future work” presents the conclusion.
WT design
The WT system consists of a WT and a generator along with the grid system as shown in Figure 1.
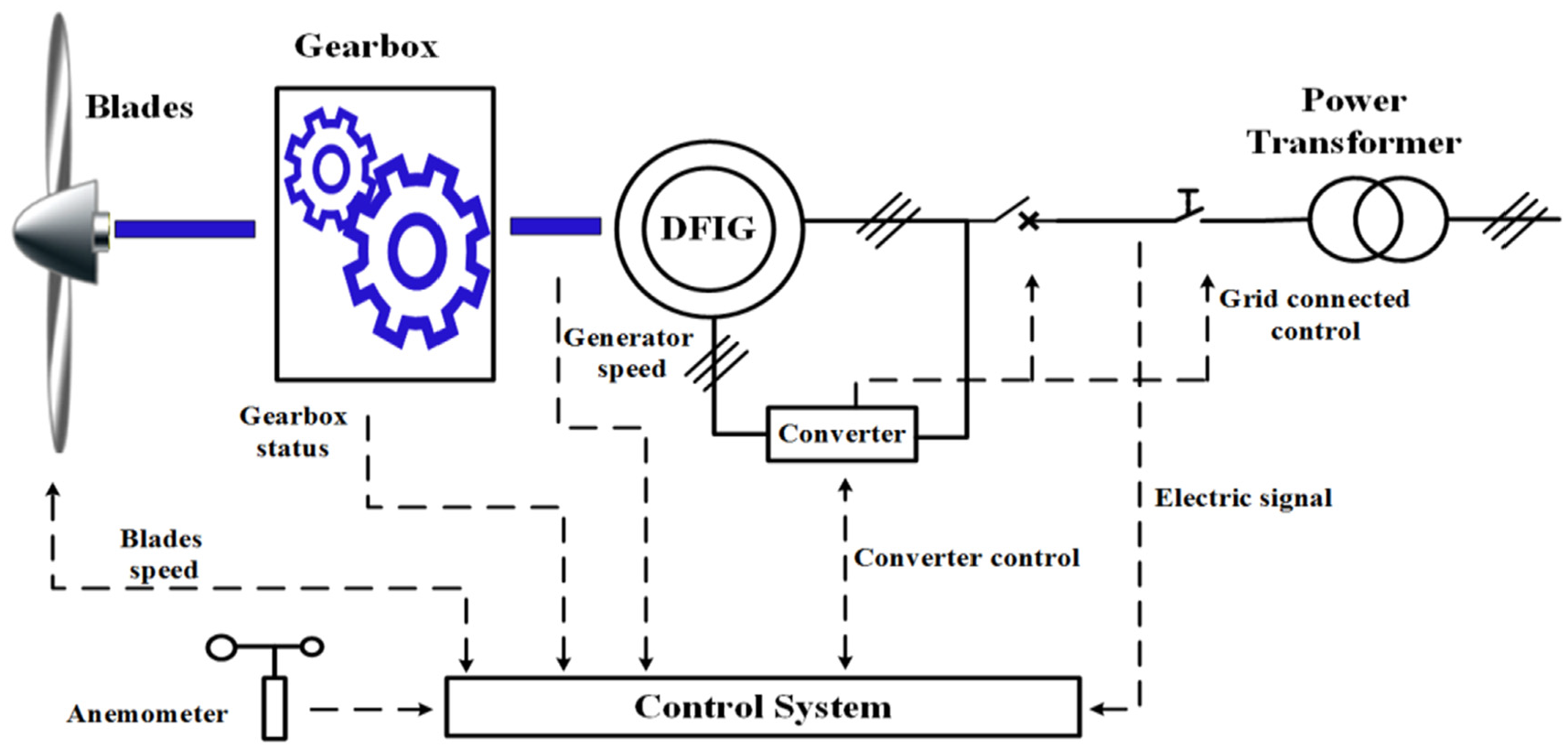
Wind turbine system components.
WT
The aerodynamic power obtained from the wind is given as


where

where

where


where


where
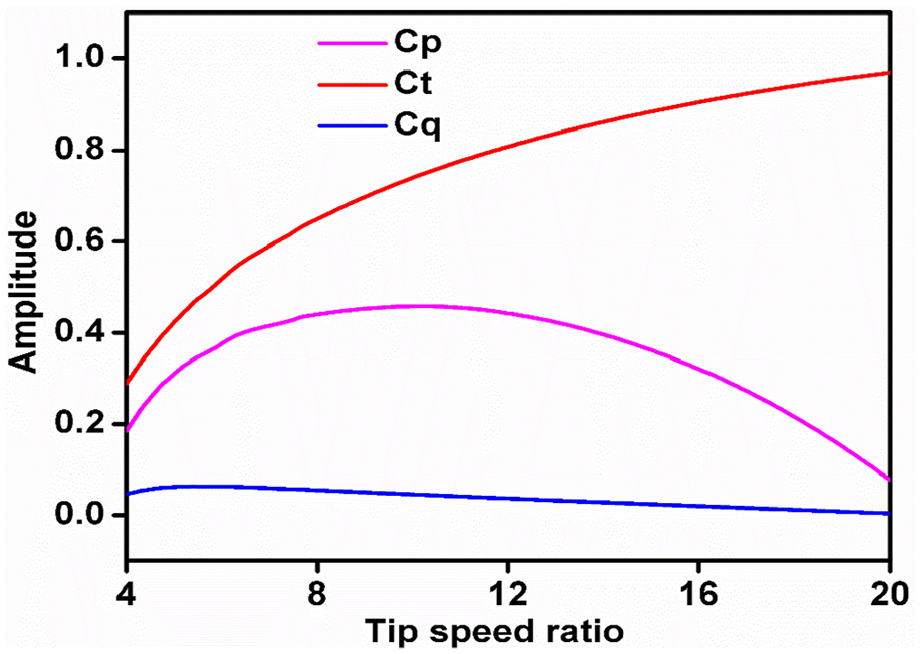
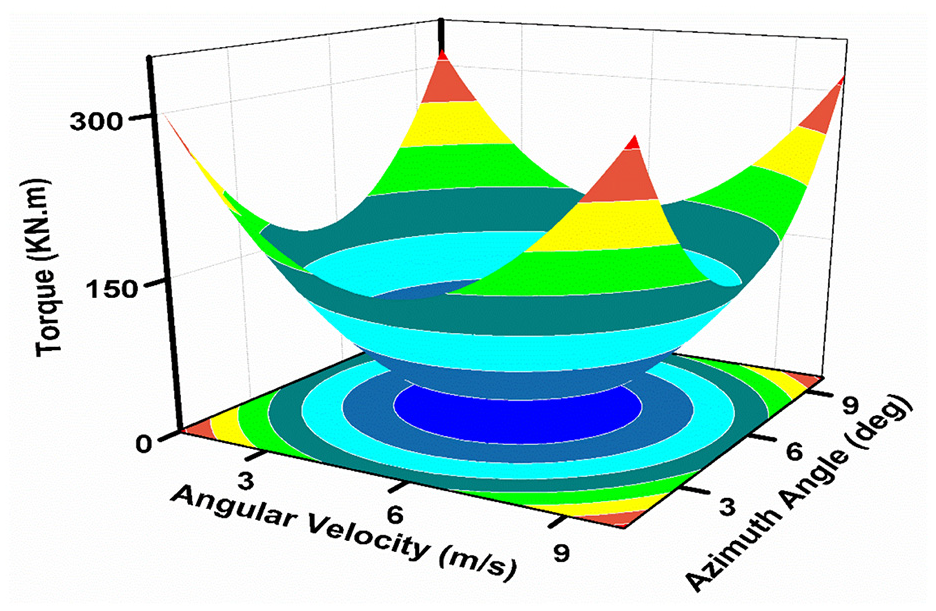
Relation of
Generator
A doubly fed induction generator (DFIG) is used. Mechanical (Tm) along with electromagnetic torque (Te) is given as


where


where
Controller design
The PID controller will be used to stabilize the output power and keep the system running in a safe and steady manner. The mathematical form of the PID controller is provided in equation (14). The objective function used for PID design and optimization is integral time absolute error (ITAE) and defined as


The parameters of the PID controller are designed as well as optimized using the PSO. This algorithm is deduced from the bird’s predation activity based on swarm intelligence. For a D-dimensional target search and N number of particles, each particle coordinate position vector can be obtained as

The velocity vector is indicated as

The optimal position of the swarm in a group is represented as

Speed and position iteration is formulated as follows


where d = 1, 2, …, D; k denotes the iteration number;

where w denotes the inertia weight, which is utilized to vary the particle’s search range and velocity,


Figure 3(a) illustrates the PSO algorithm, which is employed to optimize the constraints for the controller, but that algorithm is not effective for an uncertain and nonlinear system. Hence, the proposed algorithm that uses the function of fminsearch is presented in Figure 3(b). The detailed illustration of fminsearch is provided in Figure 4.
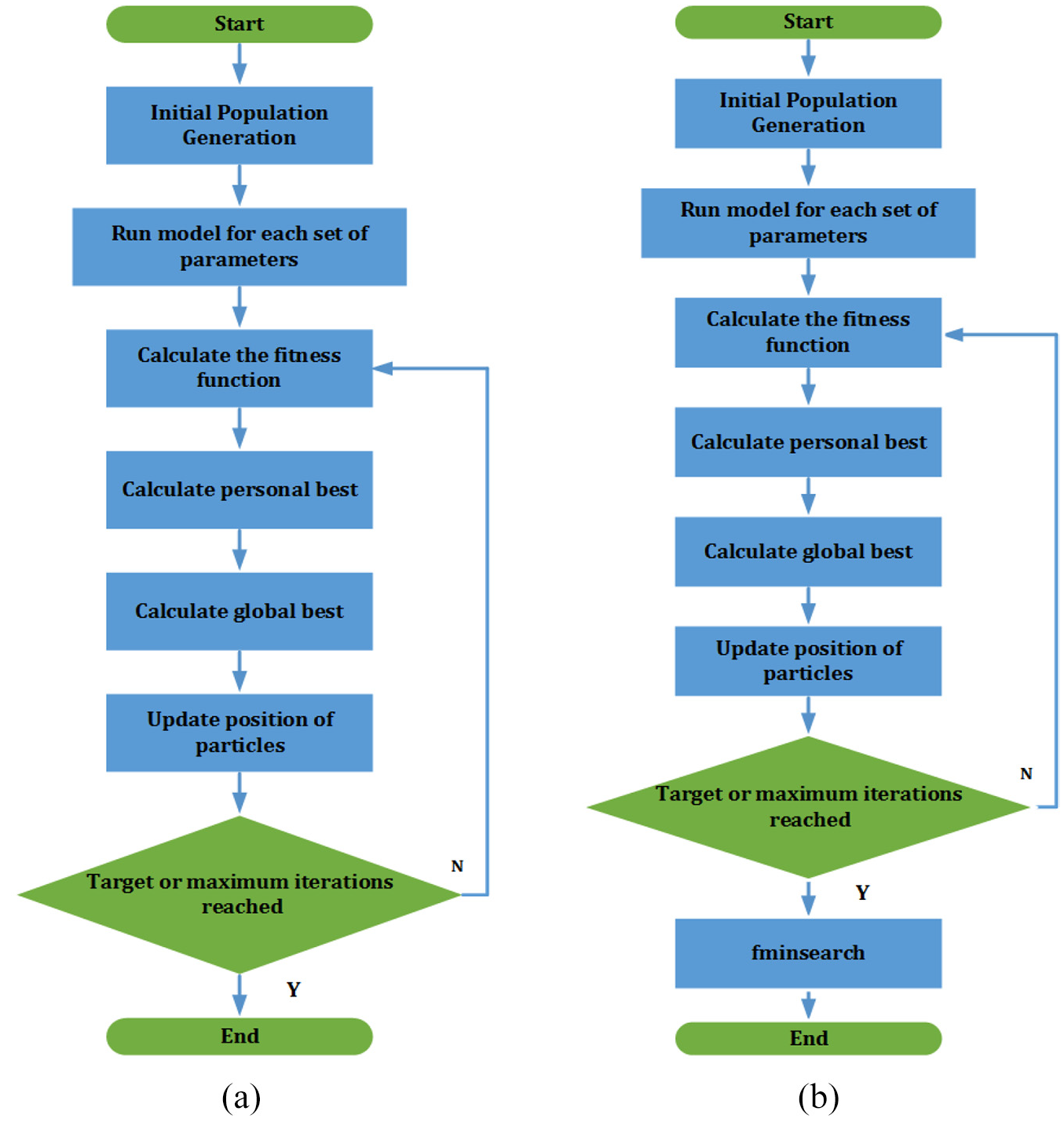
Block diagram of the algorithms: (a) conventional PSO and (b) proposed PSO.
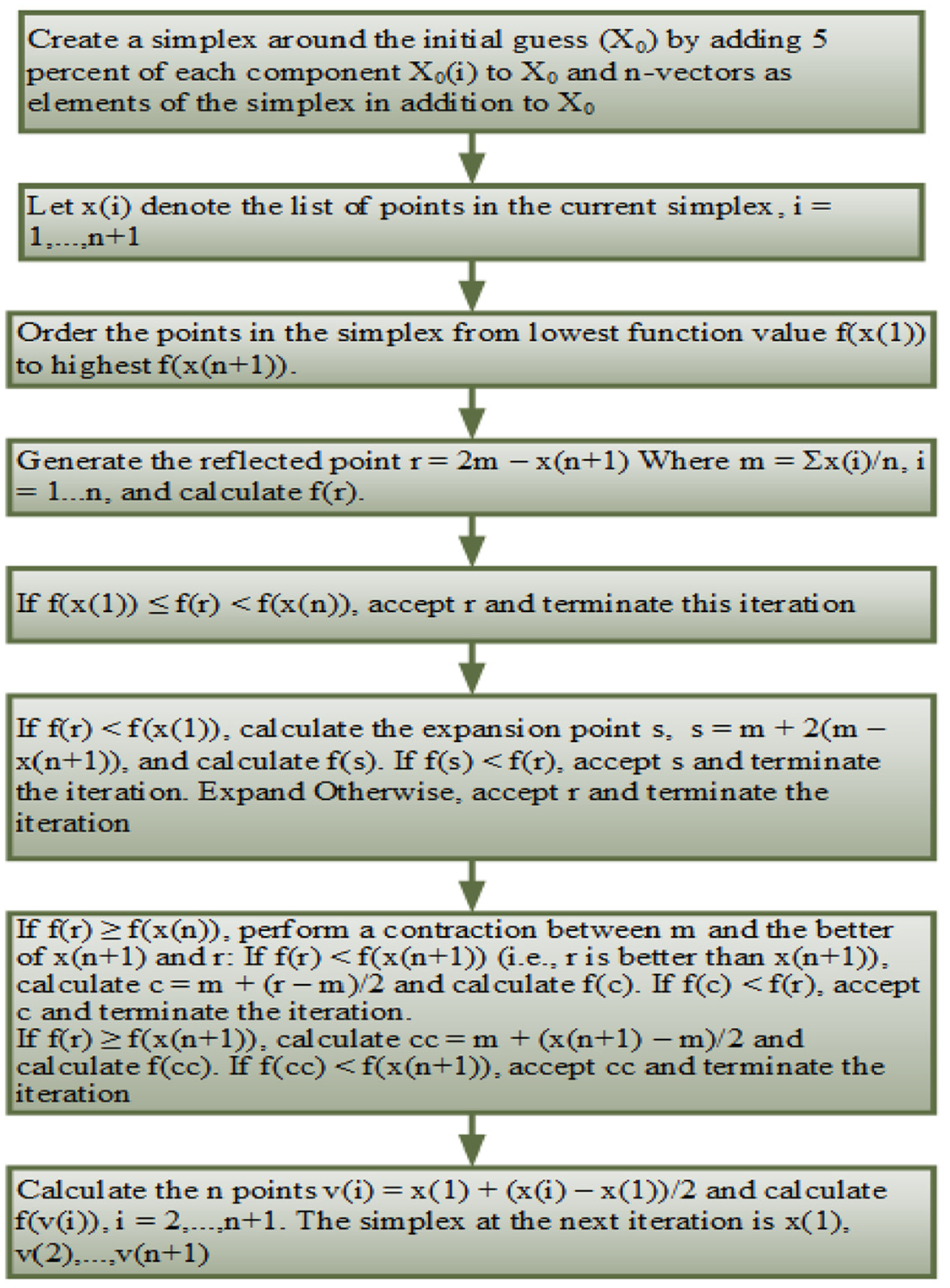
Detailed algorithm and functioning of fminsearch in the proposed PSO.
Simulation results
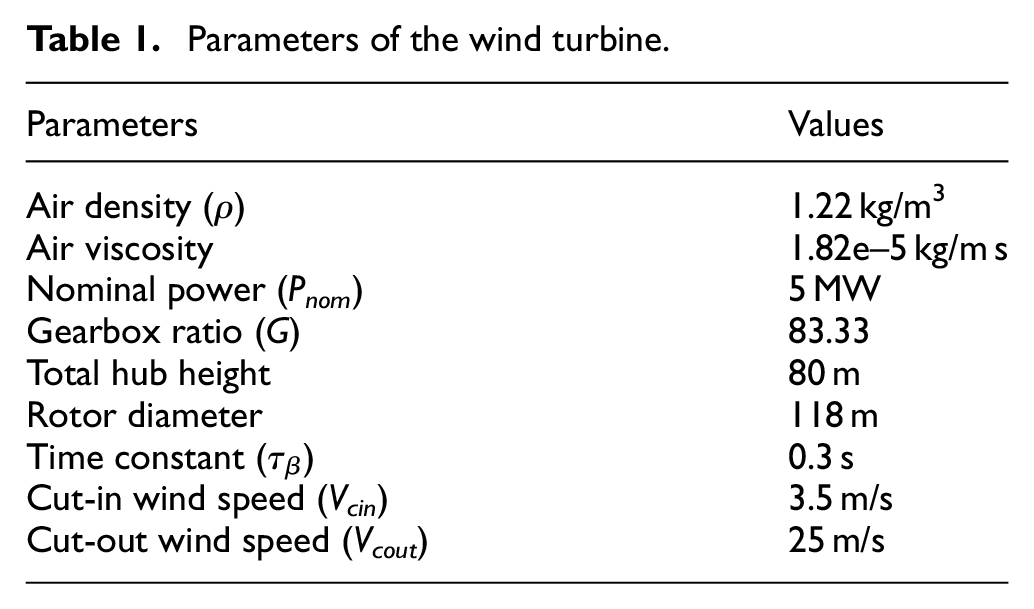
The WT is modeled and designed using the Bladed software. The parametric values are provided in Table 1. Furthermore, the system is linearized at different wind speeds from low to high. Wind speed and pitch angle along with generator torque are used as the input, while the generator speed is used as the output to linearize the system. The transfer function of the system is acquired at four different wind speeds of 13, 17, 21, and 25 m/s using MATLAB.
Parameters of the wind turbine.
For each point, a controller is designed and optimized using PSO and proposed techniques separately. The parameters obtained by PSO and their step response are as much stable as they should be. The step responses of the system at the wind speeds of 13 and 17 m/s are presented in Figure 5(a) and (b), respectively. From Figure 5(a), the system remains stable at

Step response of the system at the wind speeds of (a) 13 m/s, (b) 17 m/s, (c) 21 m/s, and (d) 25 m/s.
The statistical data of the complete step response information for the system are provided in Table 2. The proposed technique is much improved in every aspect, from rising time to settling time and stabilizing the system, compared to the conventional technique.
Step information of the system at various wind speeds.
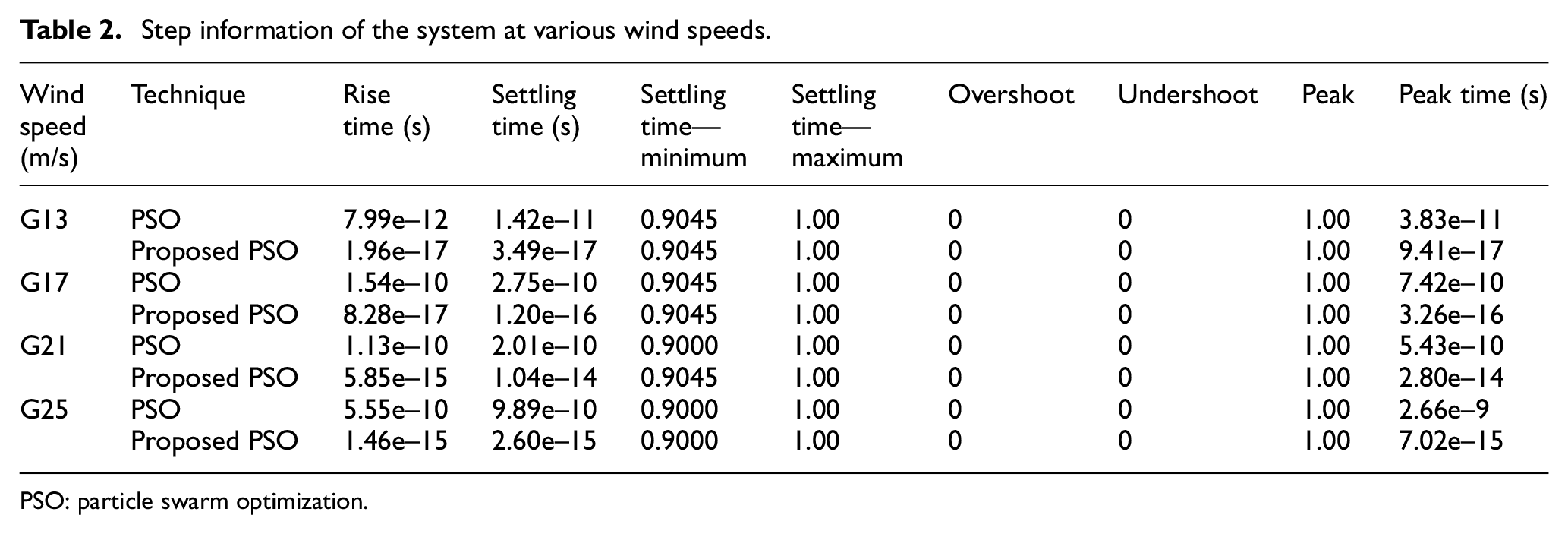
PSO: particle swarm optimization.
Lyapunov stability
The system stability is investigated through the Lyapunov function. The system is transformed into state space and the model is given in equation (23)

where x represents the state variable, u is the input variable, y is the output variable, and A, B, C, and D are the coefficients of these variables


where

If




Therefore, the Lyapunov function for the system is

The system satisfies the Lyapunov stability condition described in equation (27). The stability of the system is illustrated in Figure 6.
Lyapunov function for system stability with the proposed controller.
MATLAB modeling and results
The WT system designed using the Bladed software is implemented in MATLAB/Simulink. The block diagram of the WT system is presented in Figure 7. The wind profile is provided to the system to further inquire about the working and behavior by employing the proposed technique. The wind speed is shown in Figure 8.
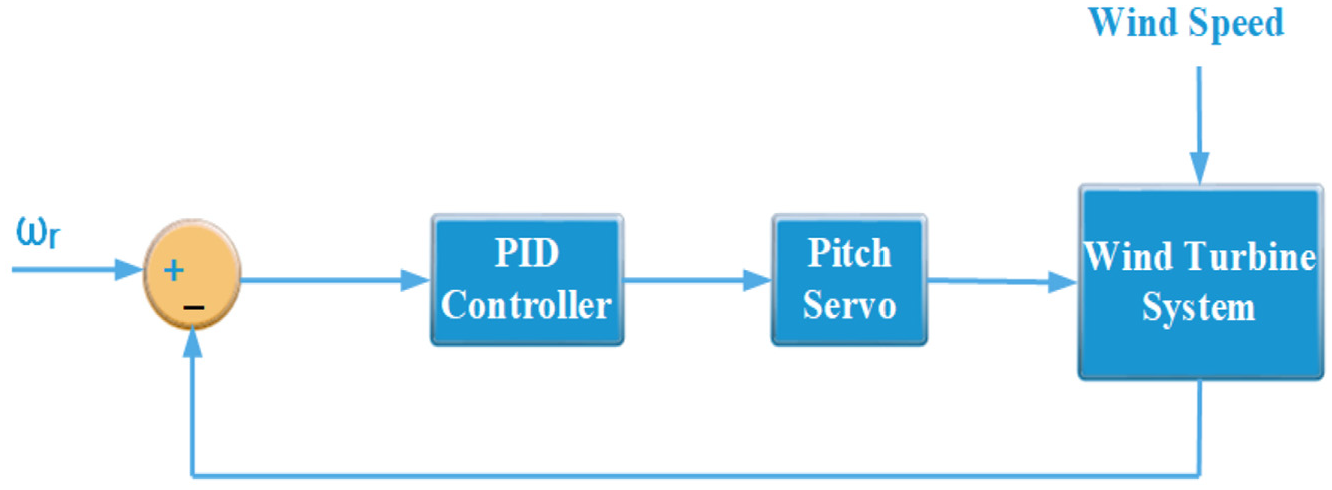
Block diagram of the wind turbine system.
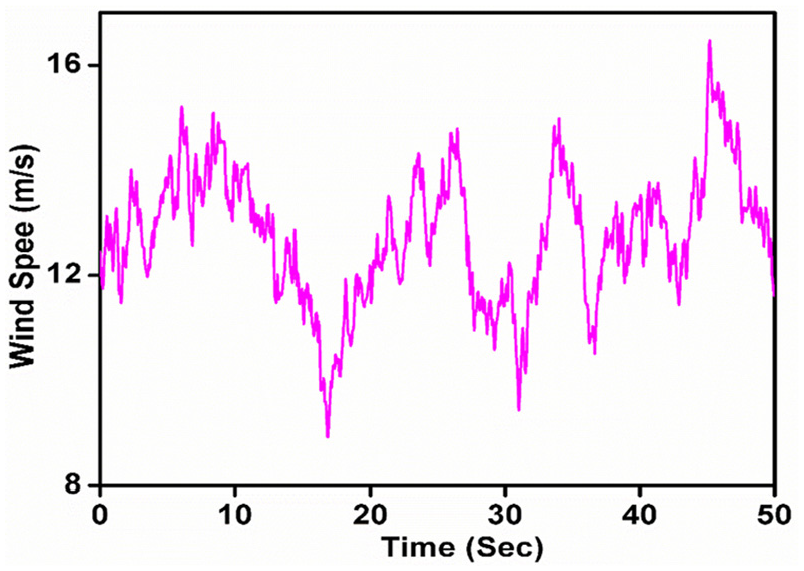
Wind profile for the system input.
Pitch servo is employed to tune the pitch angle according to the requirement of the system. Output power is maintained within the rated limit at high wind speeds with the coordination of pitch controller and servo. It is nonlinear in nature and can be related to pitch angle as follows 28

where

The wind profile is fed to the WT system to acquire the output results using the proposed technique. These results are compared with those of the conventional methodology. The output results for power along with rotor speed, mechanical torque, and pitch angle of the system is presented in Figure 9. The output power of the WT can be analyzed as shown in Figure 9(a). The output power obtained using the proposed technique is high than that obtained using the conventional technique. Figure 9(b) depicts the rotor speed and is measured per unit for this system. Rotor speed is within the rated limits, thus yielding the maximum power. Figure 9(c) illustrates the mechanical torque of the system and is calculated per unit. The mechanical torque acquired through the proposed technique is very effective; in addition, the pitch angle is very efficient to regulate the output power, rotor speed, and torque for the system as compared to the conventional methodology.
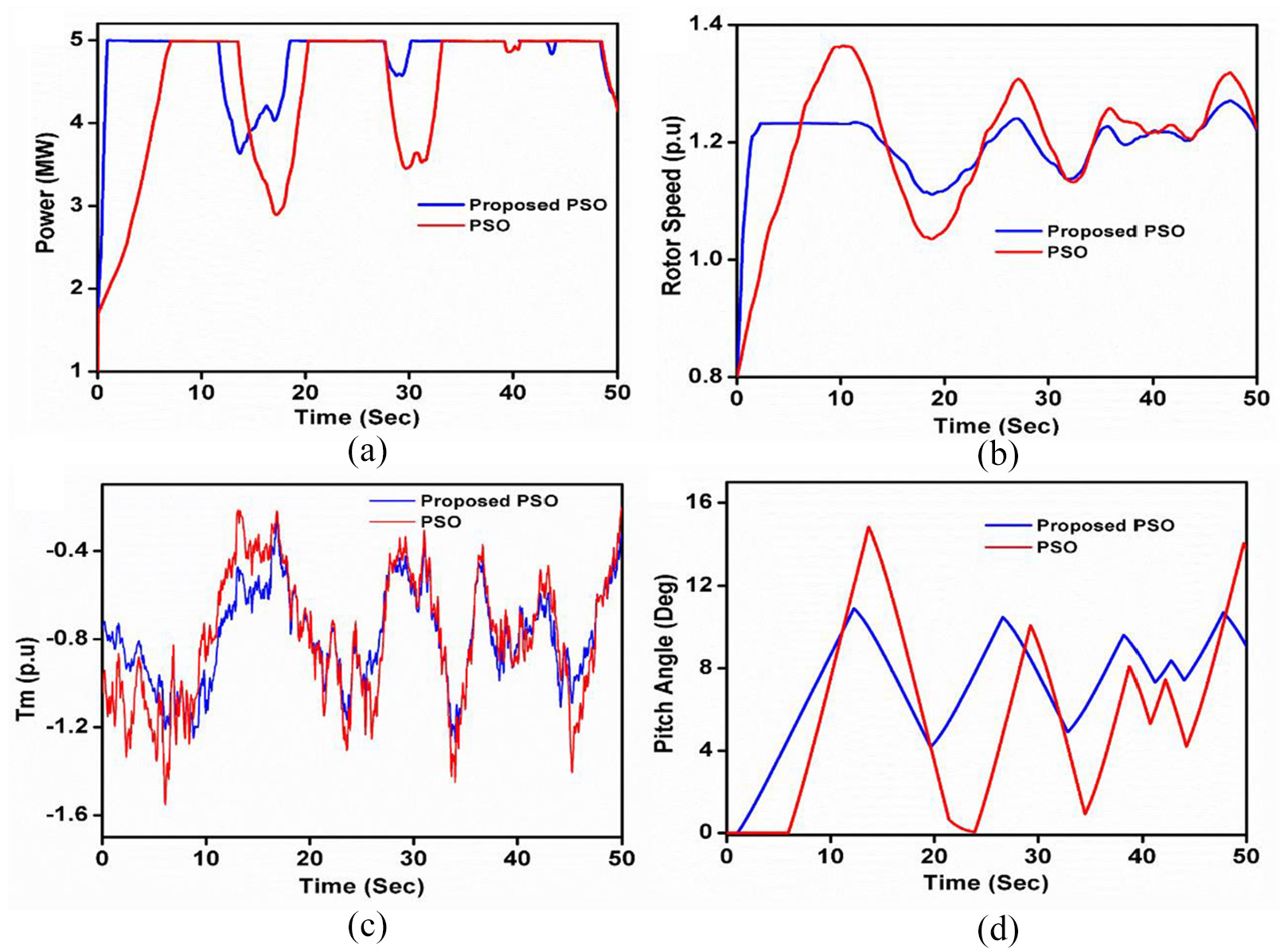
Simulation results at the given wind speed: (a) output power, (b) rotor speed, (c) mechanical torque, and (d) pitch angle.
Conclusion and future work
The PID controller is deployed to regulate the pitch angle of the WT, thus making the system efficient and stable. The PID parameters designed by conventional algorithms are not precise and efficient for system stability. The proposed PSO algorithm is used for this purpose in comparison with the conventional technique. The proposed technique is employed on a 5-MW WT. The transfer function of the designed WT is acquired using the generator demanded torque along with pitch angle and wind speed as the input, and measured generator speed as the output. Parameters of the PID are optimized by employing the proposed technique at different wind speeds. The optimized parameters for the proposed controller Kp, Ki, and Kd have a significant impact on the regulation of pitch angle along with the performance of the WT system being improved. Tabular data show the remarkable difference in the performance of both controllers. The results acquired using the proposed PSO, compared with the PSO algorithm, verify its efficacy. Therefore, the proposed methodology stabilizes the system more quickly and effectively. The system stability is verified with the Lyapunov function. The MATLAB simulation results demonstrate that the proposed PSO technique yields higher output power and limits the rotor speed along with the mechanical torque, thus providing efficient regulation of pitch angle as compared to the conventional PSO methodology.
This work can be extended to further improve the settling time for the system. The stability of the system can be increased. This could be possible by further reducing the settling time. Multiple approaches may be utilized by combining the pattern search with the existing techniques.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.