The rigid graph needs to be decomposed to solve the multi-equilibrium problem of the multi-agent formation control based on navigation function method. In this paper, a theorem and a scalable algorithm based on the Henneberg sequence of graphs are proposed for the decomposition of minimally rigid graph. The theorem demonstrates that if graph G(V, E) is a minimally rigid graph, then it can be decomposed as G = GtGc, where Gt is a spanning tree of G and Gc contains the remaining edges and their vertices. Moreover, the scalable algorithm is given to construct Gt = (Vt, Et) and Gc = (Vc, Ec), and assign the edges in Ec to n -- 2 distinct vertices in a scalable way via communication. Furthermore, a lemma is given to show when the number of vertices is less than eight, any edge can be chosen as the initialized edge, and the scalable algorithm mentioned above is always feasible. Finally, the effectiveness of the scalable algorithm is verified by numerical simulation.
In recent years, multi-agent formation control has attracted the attention of multidisciplinary researchers due to its great advantages in specific applications, such as exploration, rescue, and surveillance. Formation control is a control technique in which many robots maintain a certain formation shape and adapt to environmental constraints while arriving at a destination. A formation system can be described from three main aspects:1 the geometrical shape, the communication topology, and the control strategy. There have been three approaches describing multi-agent formation, that is, displacement-based formation control,2–6 distance-based formation control,7–9 and bearing-only formation control.10–13 Among the three approaches, distance-based formation control is regarded as a more ideal distributed approach, since the collision between the neighboring agents can be avoided. In the distance-based formation control, graph rigidity was crucial for the formation control, since it could maintain the specified geometry, as discussed in the work by Eren et al.14 It is showed that if the communicated topology graph is rigid, the formation shape could be maintained. Therefore, how to achieve a globally stable rigid formation is crucial, and it has been extensively studied by many researchers.
The existing control law, such as the one proposed in the works by Eren et al.14 and Krick et al.,15 only has local validity for small perturbations around the desired formation, and the multiple equilibria problem still existed. Dimarogonas and Johansson9 show that the global stability to the desired formation can be achieved with negative gradient control law. However, the desired formation is assumed to be a tree, which is restrictive. So far, the multi-equilibrium problem for rigid formation with agents has not been well addressed. Inspired by the works by Dimarogonas and Johansson9 and Krick et al.,15 the paper by Wang et al.16 proposes an adaptive perturbation method for three agents, demonstrating that three agents could achieve the globally stable formation. This result is then extended to multi-agent system with agents,17 and Trinh et al.18 propose that in the absence of undesired stable equilibrium points and limit cycles, the multi-agent system could achieve the desired formation shape using the perturbed gradient method. Since the globally stable rigid formation can be achieved if and only if the communicating topology graph is a tree. Inspired by this, the minimally rigid graph can be decomposed as , where is a spanning tree of graph and contains the remaining edges and their vertices. It is expected that we can design a control strategy to drive the agents to the desired distance set in , and then, distances of remaining edges in will converge to the desired values using the standard gradient control strategy. Actually, the edges of can be assigned to distinct agents which will be controlled by the novel gradient method, and the remaining two agents will be driven by the standard negative gradient control law. The distinct agents, say agent , chooses any neighbor to determine the desired distance between the two agents. Therefore, it is crucial to know how to arrange agents to edges and how to choose the neighbor of the agent by which the desired distance is determined. Moreover, it is important to give an algorithm to show how to construct and and how to assign the edges in to distinct vertices in a scalable way via communication. This paper aims to solve these questions, thus the fully distributed control strategy for globally stable rigid formation can be obtained.
In this paper, a theorem based on the Henneberg sequence of graphs shows that the decomposition as is feasible, and then, edges in can be assigned to distinct vertices to determine the desired distance between the two neighboring agents. Furthermore, a scalable algorithm is given to show that and can be constructed in a local sense; at the same time, the edges in can be assigned to distinct vertices in a scalable way via communication. Finally, a lemma is given to show when the number of vertices is less than eight, any edge can be chosen as the initialized edge, and the scalable algorithm mentioned above is always feasible.
Preliminaries
The information architecture of the formation system with agents can be modeled as a graph . denotes the vertex set, which represents agent . And we model the edge set as the information structure. The edge denotes that agent can obtain information from agent . That is, the agent is a neighbor of agent , and denotes the set of all neighbors of agent . According to the graph , the weighted adjacency matrix can be defined as
If for all , the weighted graph is undirected. Each edge in graph is assigned to a constant , which means the desired distance that agents should preserve. Let . Then, a desired formation is represented as the framework . If all distance constraints specified by are satisfied and all distances between any pair of vertices in remain unchanged during the continuous displacement, then the formation is said to be rigid. Note that the rigid formation defined here is equivalent to the rigid graph defined in the work by Asimow and Roth.19 A graph is said to be minimally rigid if it is rigid and has no graphs with the same vertices but fewer edges.20 In this paper, if the information architecture graph is minimally rigid, the formation is minimally rigid. The following lemma gives the numerical relationship between the number of nodes and the number of edges in the minimally rigid graph.
Lemma 1
A graph with is minimally rigid if and only if , and for all , there holds , where is the set of vertices incident to .21
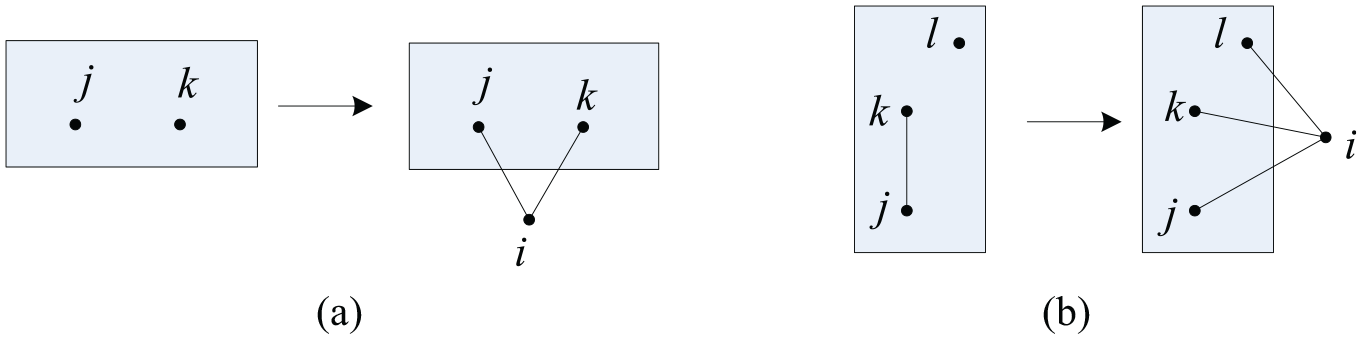
The construction of minimally rigid graphs usually consists of two graph operations: vertex addition operation and edge splitting operation. Let be two different vertices of a minimally rigid graph . A vertex addition operation involves adding a vertex and connecting it to and , as shown in Figure 1(a). Let , and be the three vertices of a minimally rigid graph, and there is an edge between and . An edge splitting operation includes deleting this edge, adding a vertex , and connecting it to , and , as shown in Figure 1(b). A sequence of graphs is called a Henneberg sequence, which satisfies the following conditions: the graph is the complete graph with two vertices, and each graph can be obtained from by either a vertex addition operation or an edge splitting operation.22
Representation of (a) vertex addition operation and (b) the edge splitting operation.
The following result gives a constructive method to form a minimally rigid graph.
Lemma 2
Every minimally rigid graph on more than one vertex can be obtained as the result of a Henneberg sequence. Moreover, all the graphs of such a sequence are minimally rigid.22
Scalable algorithm for the decomposition of graph
Since the global stability of the multi-agent rigid formation can be achieved if and only if the topology is a tree, we need to decompose the rigid formation as , where is a spanning tree of and contains the remaining edges and their vertices. Then, the globally stable rigid formation can be achieved by designing an appropriate control algorithm. It is expected that we can design a control strategy to drive the agents to the desired distance set in , and then, distances of remaining edges in will converge to the desired values using the standard gradient control strategy. Supposing that the minimally rigid graph has vertices, then there are edges in . And by Lemma 1, there are edges in . That is, distinct agents should be arranged to look after the distances of edges, and then, the edges can achieve the desired distances using the novel control algorithm.
Now, we explain how to arrange agents to n-2 distinct edges and how to choose the neighbor of the agent by which the desired distance is determined. The next theorem shows that the minimally rigid graph can always accomplish such an assignment.
Theorem 1
Suppose the graph is minimally rigid graph. There exists a decomposition , such that edges in can be assigned to distinct vertices.
Proof
We can prove Theorem 1 by induction. For , is empty, and there is no edge to be assigned. For , contains only one edge, and the theorem is obviously true. Let us suppose the theorem is true for , that is, for any minimally rigid graph with , there exists a decomposition such that edges in subgraph can be assigned to distinct vertices of . Now, let us consider the case . By Lemma 2, any minimally rigid graph with can be obtained from a minimally rigid graph with by performing either a vertex addition operation or an edge splitting operation. We discuss two cases as follows.
Case 1. The graph is obtained by performing a vertex addition on .
Let be two distinct vertices of a minimally rigid graph . Let be the spanning tree of supporting the induction hypothesis. Then, we can obtain a spanning tree of graph from by adding only one newly added edge, say . Thus, we have . Since all the edges in have been assigned to distinct vertices of , we just need to assign the edge to the new vertex . The theorem is true in this case.
Case 2. The graph is obtained by performing an undirected edge splitting on .
Suppose that are three distinct vertices of a minimally rigid graph and is an edge of . An edge splitting operation is shown in Figure 1(b). There are two possibilities shown in the following:
The edge is not in supporting the induction hypothesis. From the induction hypothesis, we know that the edge had been assigned to either vertex or vertex . Without the loss of generality, suppose it is vertex . Since the edge is now removed, then vertex is unoccupied. Let be the spanning tree of supporting the induction hypothesis. We can obtain a spanning tree of graph from by adding the edge . Now, we have . Let be assigned to agent and be assigned to agent . Then, the theorem is true in this subcase.
The edge is in supporting the induction hypothesis. Since the edge is removed, we can obtain a spanning tree of graph from as . So, we have . Let be assigned to agent . Then, the theorem is true in this subcase.
Summarizing all the above possible cases, we conclude that the theorem is true. □
Next, we give an algorithm to show how to construct and and how to assign the edges in in a scalable way via communication.
Algorithm 1
% —the set of agents, to each of which an edge in has been assigned.
% —the set of agents which are both in and current .
% —the number of the agents in the set .
Step (i) [via communication between neighboring agents and ] Initiation.
(1) Let .
(2) Take a pair of neighboring agents , and let , , , and .
Step (ii) [via communication between agent and its neighbors] For the case when can find a neighbor that does not belong to current , go to the next step; otherwise, go to the end.
Step (iii) If one of the following cases is satisfied, go to the next step; otherwise, let , go to Step (i)-(2).
Step (iv) [via communication between neighboring agents and ] According to the values of and , do one of the following actions:
(1) For and , suppose . Let , , , and . Assign to , let , and finally, let , go to Step (ii).
(2) For and , suppose . Let , , , and . Assign to , to , and let , if ; otherwise, assign to , to , and let . Finally, let , go to Step (ii).
(% The proof of Theorem 1 ensures that at least one of does not belong to .)
(3) For and , must be . In this case, let , , and finally, let , go to Step (ii).
(4) For and , suppose . Let , , , , assign to , let , and finally, let , go to Step (ii).
Step (v). End, return .
Remark 1
Theorem 1 can guarantee the feasibility of Algorithm 1, and the output of Algorithm 1 is always there, and then, we can always find the appropriate initialized edge to make the algorithm work.
Remark 2
Algorithm 1 works for redundantly rigid graphs, and the global rigid graphs belong to redundantly rigid graphs, so it is also suitable for the global rigid ones. For the redundantly rigid graph, Algorithm 1 can be modified as follows. In this case, equations (1) and (2) should be replaced by
and
respectively; and in Step (iv), agent should ignore redundant neighbors in . In such a way, generated by the algorithm is a minimally rigid graph, which is just a subgraph of the redundantly rigid graph . Let the agents ignore the redundant neighbors, if the novel formation control algorithm can globally stabilize the minimally rigid formation, the redundantly rigid formation can also be globally stabilized.
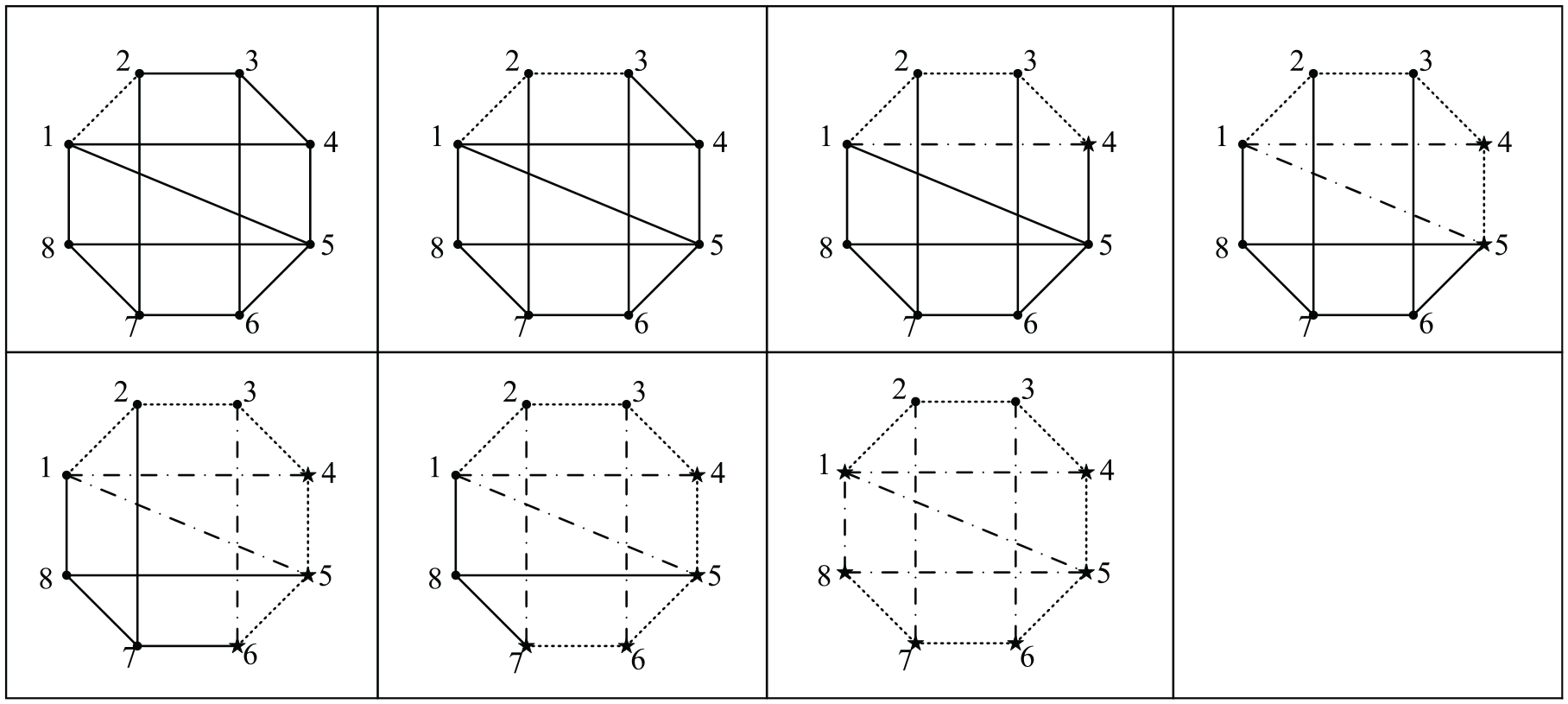
Note that the output of the algorithm is not necessarily unique. Figure 2 shows an execution of the algorithm. The algorithm initiates from the edge . In Figure 2, the dashed edges belong to , the dashed–dotted edges belong to , and the vertices marked by star denote the vertices in . Therefore, we can add control constrains to agent 4 for looking after , to agent 5 for looking after , to agent 6 for looking after , to agent 7 for looking after , to agent 8 for looking after , and to agent 1 for looking after , respectively.
Execution of Algorithm 1.
In contrast to the previous example, when the initialized edge is chosen unprofitably, Algorithm 1 is not feasible, and we cannot obtain the decomposition of the graph , which will be shown in the simulation. However, if we choose the appropriate initialized edge which is always existed, Algorithm 1 is feasible. Next, we give a lemma to demonstrate that when the number of vertices is less than eight, then any edge can be chosen as the initialized edge, and the scalable algorithm mentioned above is always feasible.
Lemma 3
If the graph is minimally rigid, when the number of vertices is less than eight, the scalable Algorithm 1 mentioned above is always feasible.□
Proof
In Step (iii)-(2), , the algorithm is always feasible. At each step, when , the subgraph is a minimally rigid graph.
When , the subgraph is not minimally rigid. Suppose that Step (iii)-(1) is not feasible, we have .
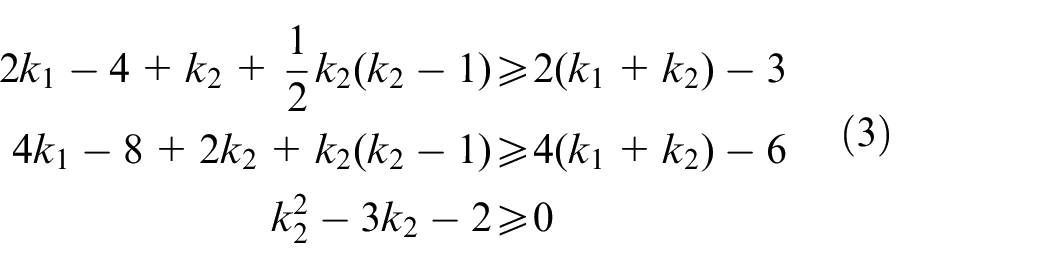
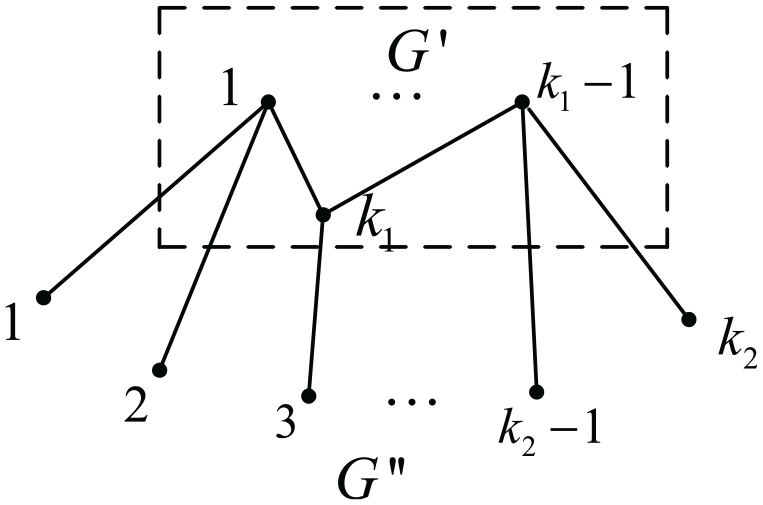
As shown in Figure 3, the subgraph which is not minimally rigid has vertices, and graph is the minimally rigid graph which has vertices. From the hypothesis, we know that there does not exist a vertex with being 2 or 3, then . Therefore, there are only edges between vertices and the subgraph . Moreover, there are at most edges between vertices. Then, we have the following equation
The left of the equation means the most edges of the current graph. From equation (3), we have , then we also have , which means that when the number of vertices is more than seven, the graph may be minimally rigid. Otherwise, the hypothesis does not hold. Therefore, we can conclude that when the number of vertices is less than eight, the scalable Algorithm 1 mentioned above is always feasible.□
Minimally rigid graph and .
Simulations
In this section, we do some numerical simulations to illustrate the effectiveness of the scalable algorithm. The simulation environment: Intel® Core™ i5-4210U CPU at 1.70 GHz, 2.40 GHz, RAM 4.00 GB. And the simulation software is Matlab 2014b. Let denotes the number of agents of a minimally rigid graph and denotes the execution time taken to complete the simulation. If , then ; If , then ; If , then ; If , then . From the above data, we can conclude that for a given computational platform, the growth rate of the execution time is almost half of that of the agent number, and the execution time is short. Then, the proposed scalable Algorithm 1 can be applied in practice.
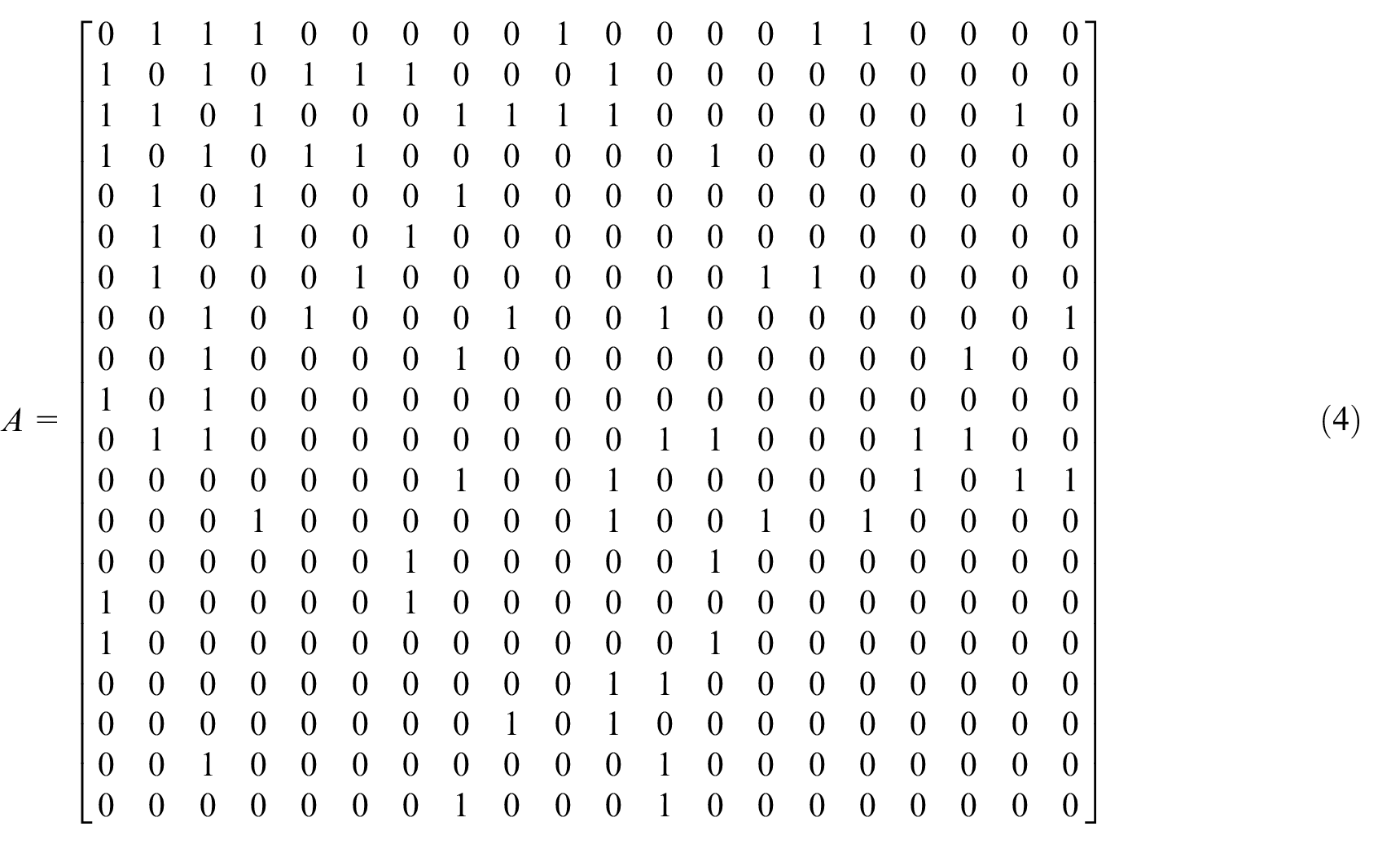
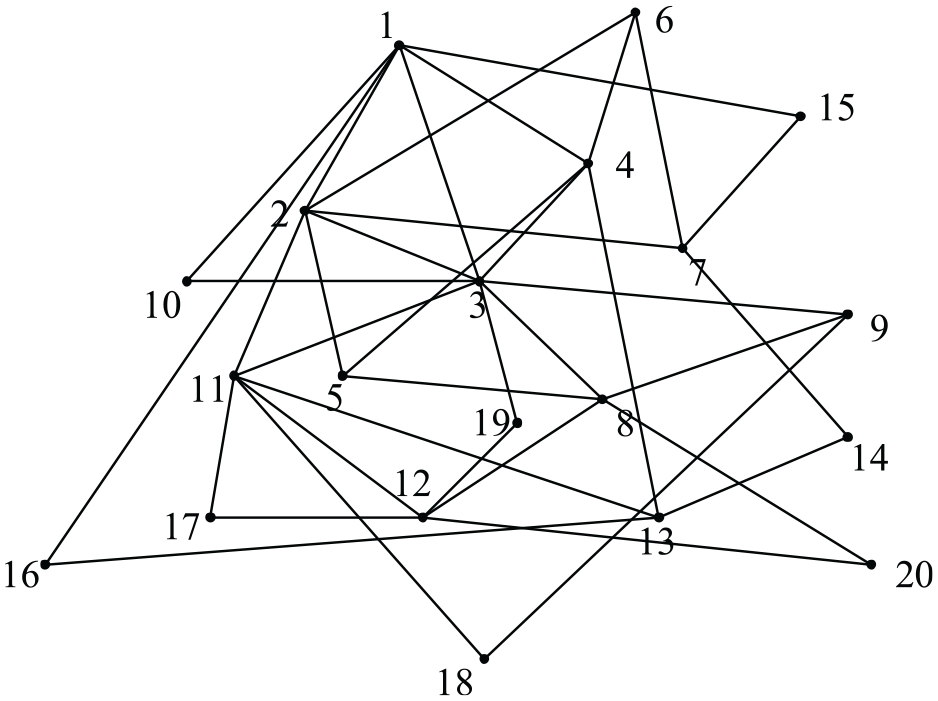
Here, we only give one of the simulations. First, a minimally rigid graph is constructed based on the Henneberg sequence of graphs. The graph is shown in Figure 4, and the corresponding adjacent matrix of graph is
The rigid graph .
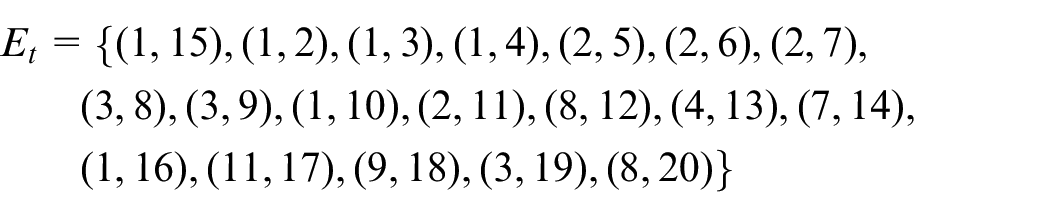
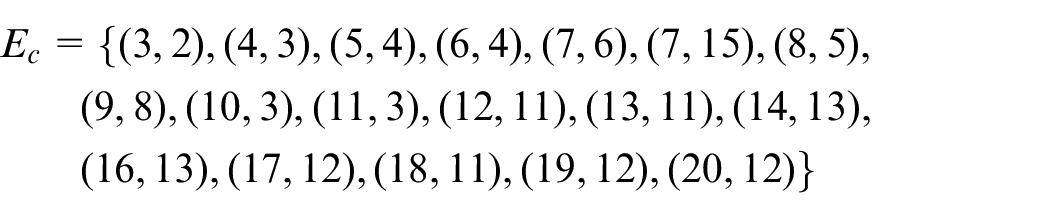
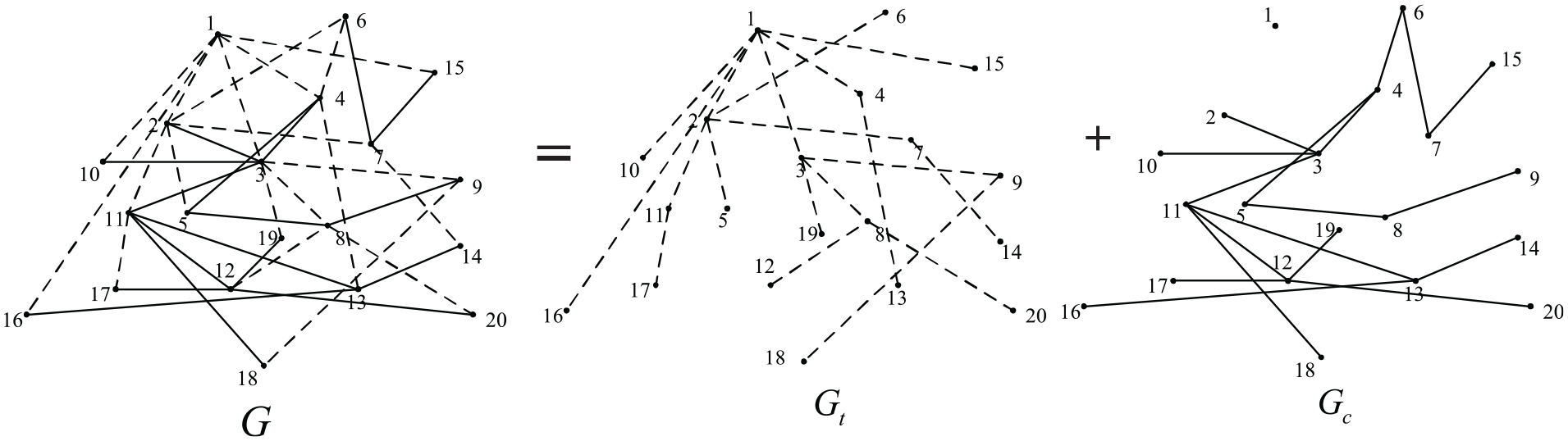
Second, based on Algorithm 1, if we choose the appropriate initialized edge, the minimally rigid graph can be decomposed as , where , , and the edges in are assigned to distinct vertices belong to in a scalable way via communication. We choose the initialized edge as (1,15; the initialized edge is not unique), and the output of the algorithm is as follows
where denotes the set of agents, to each of which the corresponding edge in has been assigned. The decomposition of graph is shown in Figure 5. In Figure 5, the dashed edges belong to and the solid edges belong to . In contrast to the previous initialized edge, when the initialized edge is chosen as (12,20), Algorithm 1 is not feasible, and we cannot obtain the decomposition of the graph . However, if we choose the appropriate initialized edge which is always existed, Algorithm 1 is feasible.
The decomposition of graph .
Conclusion
In this paper, a theorem based on the Henneberg sequence of graphs shows that if graph is minimally rigid graph, the graph can be decomposed as and edges in can be assigned to distinct vertices. Furthermore, an algorithm is given to construct and and assign the edges in to distinct vertices in a scalable way via communication. Currently, it is demonstrated that when the number of vertices is less than eight, the scalable algorithm is always feasible. How to design a globally stable control algorithm for the rigid formation is still a challenging problem in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant nos 61673106, 61873229, 61806175, and 61873346; in part by the Jiangsu Planned Projects for Postdoctoral Research Funds (1601024B); in part by the Natural Science Foundation of Jiangsu Province (BK20170515); and in part by the Jiangsu Government Scholarship for Overseas Studies.
ORCID iDs
Qin Wang
Shengquan Li
References
1.
AndersonBDYuCFidanB, et al. Rigid graph control architectures for autonomous formations. IEEE Contr Syst Mag2008; 28(6): 48–63.
2.
LinZFrancisBMaggioreM.Necessary and sufficient graphical conditions for formation control of unicycles. IEEE T Automat Contr2005; 50(1): 121–127.
3.
ShenQKShiPShiY, et al. Adaptive output consensus with saturation and dead-zone and its application. IEEE T Ind Electron2017; 64(6): 5025–5034.
4.
ShenQKShiPZhuJW, et al. Adaptive consensus control of leader-following systems with transmission nonlinearities. Int J Control2019; 92(2): 317–328.
5.
HeLLZhangJQHouYQ, et al. Time-varying formation control for second-order discrete-time multi-agent systems with directed topology and communication delay. IEEE Access2019; 7: 33517–33527.
6.
LiuGPZhangSJ.A survey on formation control of small satellites. Proc IEEE2018; 106(3): 440–457.
7.
WangQHuaQYiY, et al. Multi-agent formation control in switching networks using backstepping design. Int J Control Autom2017; 15(4): 1569–1576.
8.
WangQChenZLiuP, et al. Distributed multi-robot formation control in switching networks. Neurocomputing2017; 270: 4–10.
9.
DimarogonasDVJohanssonKH. On the stability of distance-based formation control. In: Proceedings of the 47th IEEE conference on decision and control, Cancun, Mexico, 9–11 December 2008, pp. 1200–1205. New York: IEEE.
10.
BasiriMBishopANJensfeltP.Distributed control of triangular formations with angle-only constraints. Syst Control Lett2010; 59(2): 147–154.
11.
TrinhMHZelazoDMAhnHS.Formations on directed cycles with bearing-only measurements. Int J Robust Nonlin2018; 28(3): 1074C1096.
12.
ZhaoSYLiZHDingZT.A revisit to gradient-descent bearing-only formation control. In: Proceedings of the IEEE 14th international conference on control and automation, Anchorage, AK, 12–15 June 2018, pp. 710–715. New York: IEEE.
13.
ZhaoSYLiZHDingZT.Bearing-only formation tracking control of multiagent systems. IEEE T Automat Contr2019; 64: 4541–4554.
14.
ErenTBelhumeurONWhiteleyW, et al. A framework for maintaining formations based on rigidity. In: Proceedings of the 15th IFAC world congress, Barcelona, 21–26July2002, pp. 499–504. Oxford: Pergamon Press.
15.
KrickLBrouckeMEFrancisB.Stabilization of infinitesimally rigid formations of multi-robot networks. Int J Control2009; 82(3): 423–439.
16.
WangQTianYPXuYJ.Globally asymptotically stable formation control of three agents. J Syst Sci Complex2012; 25(6): 1068–1079.
17.
TianYPWangQ.Global stabilization of rigid formation in the plane. Automatica2013; 49(5): 1436–1441.
18.
TrinhMHPhamVHParkMC, et al. Comments on “global stabilization of rigid formations in the plane. Automatica2017; 77(3): 393–396.
19.
AsimowLRothB.The rigidity of graphs II. J Math Anal Appl1979; 68(1): 171–190.
20.
YuCHendrickxJMFidanB, et al. Three and higher dimensional autonomous formation: rigidity, persistence and structural persistence. Automatica2007; 43(3): 387–402.
21.
LamanG.On graphs and rigidity of plane skeletal structures. J Eng Math1970; 4(4): 331–340.
22.
HendrickxJMFidanBYuC, et al. Formation reorganization by primitive operations on directed graphs. IEEE T Automat Contr2008; 53(4): 968–979.