
Abstract
This article proposes and studies a problem of preview control for a type of discrete-time interconnected systems. First, adopting the technique of decentralized control, isolated subsystems are constructed by splitting the correlations between the systems. Utilizing the difference operator to the system equations and error vectors, error systems are built. Then, the preview controller is designed for the error system of each isolated subsystem. The controllers of error systems of isolated subsystems are aggregated as a controller of the interconnected system. Finally, by employing Lyapunov function method and the properties of non-singular M-matrix, the guarantee conditions for the existence of preview controllers for interconnected systems are given. The numerical simulation shows that the theoretical results are effective.
Keywords
Introduction
In many practical cases, future reference or disturbance signal of control systems is either partly or completely known, such as the flight path of aircraft, the processing path of numerically controlled machine tools, the driving path of vehicles, and so on. This future information is fully utilized to improve the quality of system, which is the preview control problem. Since Sheridan 1 put forward the concept of preview control, which was further upheld by Masayoshi Tomizuka, Tohru Katayama, and other scholars in the 1960s, preview control has attracted extensive attention in theoretical research and application, and formed a set of relatively complete theories and methods.2–4 Preview control theory has been widely combined with various systems in recent years, which has produced many important results. In Liao et al., 5 preview control theory and descriptor systems are merged to investigate preview control for linear causal descriptor systems. The theory results of preview control were extended to the cooperative consensus problem of multi-agent systems, and the sufficient conditions to guarantee the achievement of cooperative preview tracking control were given. 6 In addition, the theory of multi-rate systems preview control and random systems preview control has made progress.7,8 At the same time, preview control has also been exploited in many engineering control problems, such as robot system, active suspension system, electromechanical servo, and aircraft.9–11
The so-called interconnected system refers to the system with complex structure, comprehensive functions, numerous factors, and large scale. Interconnected system is also called large-scale system. The power systems, urban transportation networks, and water resources systems are the examples of actual interconnected systems, which can be seen in daily life.12–14 For interconnected systems, if the controller is designed by centralized control method, it will be difficult to centralize and deal with a large amount of information, which makes the control difficult to achieve. Therefore, decentralized aggregation method is adopted to design the controller15–17 from a mathematical perspective, that is, the large-scale systems decomposition method. First, the associated terms are deleted artificially to obtain several low-dimensional systems (called isolated subsystems), and controllers are designed to meet certain requirements. Then, the controller of the interconnected system is obtained through a certain method of synthesis.18–20 So far, there have been many control theories for interconnected systems. The tracking problem of interconnected systems through decentralized iterative learning control was studied in the following literature.21–23 Zhang and Feng 23 reported the problem of controller design for fuzzy interconnected systems, and its stability is analyzed using piecewise Lyapunov function. Furthermore, Koeln 24 discusses the decentralized control of interconnected systems with a special structure, and studies its application in large refrigeration and air conditioning systems.
Under the current circumstances that theories of preview control and interconnected systems have made great progress, it has important theoretical and practical significance to associate with the two theories. Until now, only Liao et al. 25 solved a type of preview tracking control problems related to continuous-time interconnected systems. This article designs a controller with preview effect for a type of discrete-time interconnected systems, taking into account the previewable situation of both the external disturbance signal and the reference signal.
Research contents are arranged as follows: The introduction is given in section “Introduction.” Section “Preliminaries” consist of the elementary knowledge, which gives the key concepts needed in this paper. Section “Problem formulation” presents preview control problems for a type of interconnected systems and gives fundamental assumptions. The design of error system controller of isolated subsystem and controller of interconnected systems are discussed in sections “Controller of error system of isolated subsystems” and “Preview controller design for interconnected systems,” respectively. Section “Numerical simulation” explains numerical simulation. Finally, a brief conclusion is given in section “Conclusion.”
Throughout this paper,
Preliminaries
For readability, the definition and partial properties of Hadamard product and non-singular M-matrix are given here.
Definition 1
Set
The following properties can be obtained instantly from Definition 1 and the definition of matrix multiplication.
Property 1
Seting

Definition 2
Let

where
Lemma 1
If the non-diagonal elements of matrix
For any
There is a matrix
It can be proved that the non-singular M-matrix also has the following property.
Theorem 1
If
Proof
From Lemma 1, there is a diagonal matrix
that

which means
Problem formulation
Consider discrete-time interconnected system
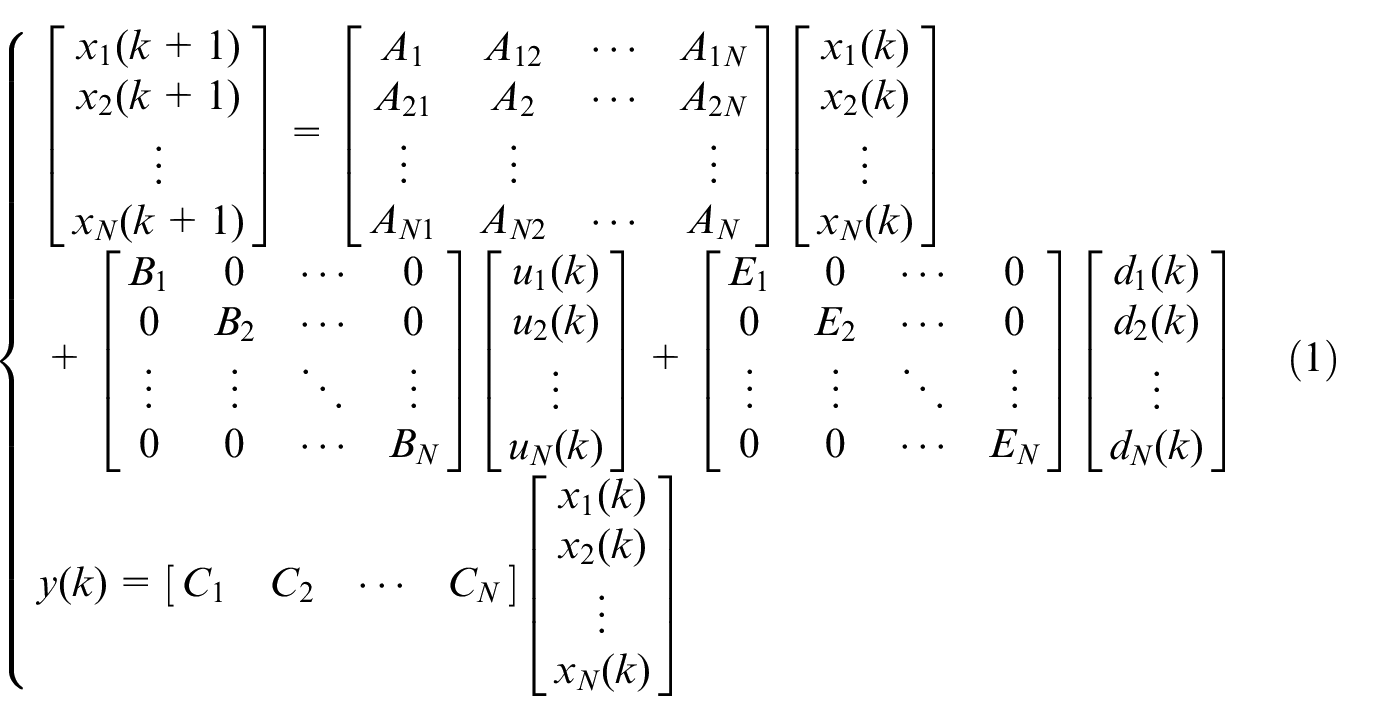
Clearly, system (1) is able to be equivalently expressed as
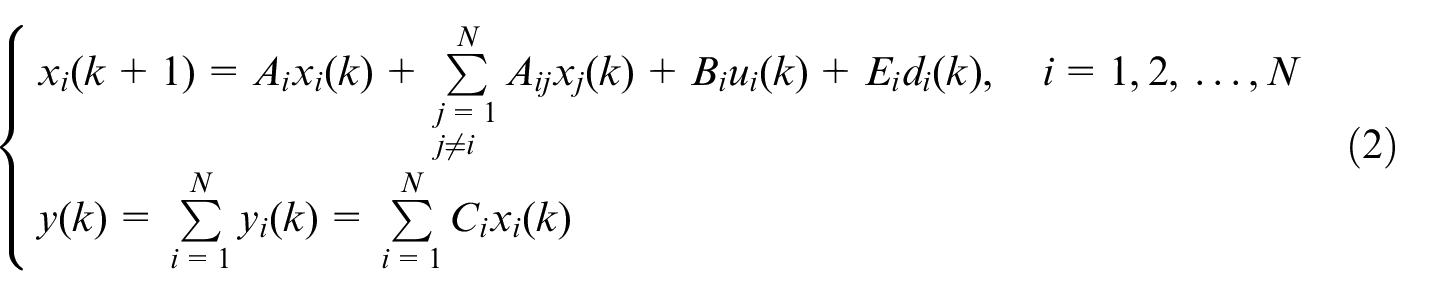
Here,
First, the basic assumptions are given as the following:
Assumption 1.
Assumption 2.
Assumption 3. The reference signal

Assumption 4
The disturbance signal

Remark 1
Assumption 1 and Assumption 2 are fundamental assumptions for the original system. In the design of the controller, it is necessary to build the error system (10) and take the performance index function of system (11). The controller of interconnected system is obtained under the conditions where
The tracking error

The aim of this article is to adopt optimal control theory to design a previewable controller that allows the output
Controller of error system of isolated subsystems
For the sake of designing the controller, the method of decentralized control is utilized. First, we cut off the linkage between subsystems to form isolated subsystems and design controller for each isolated subsystem. Then, the controllers of the isolated subsystems are combined to get the controller of the interconnected systems. Finally, by discussing the stability of interconnected system, the constraints of associated terms are obtained.
Based on the output of system (2), we rewrite

where
Remark 2
We can think of
The equation of ith isolated subsystem is

Currently, the error system is constructed for the isolated subsystem by the method of usually preview control. As a result, the tracking problem of isolated subsystem is turned into the error system regulation problem. Since the error system of interconnected system is still needed in the construction of the controller of the interconnected system, the error system (2) is constructed first to avoid the repetition calculations. Then, the correlation term is cut off to obtain the error systems of the isolated subsystems.
The
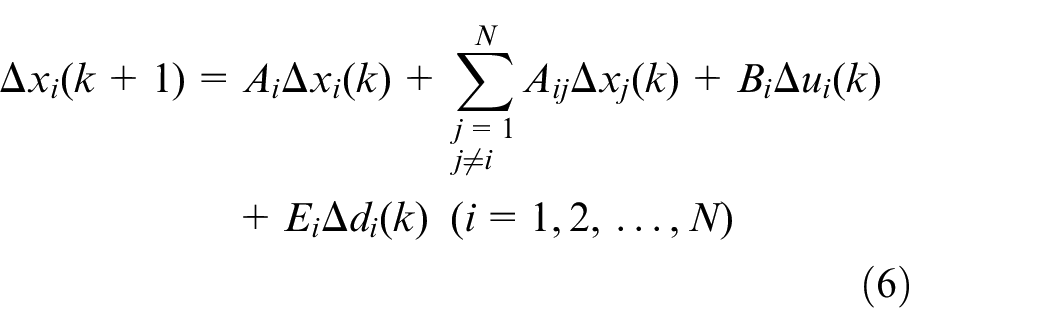
Utilizing
Notice that
Combine equations (6) and (8) to get
Here
System (9) is the error system of interconnected system (2).
Noted that
The error system of isolated subsystems is collected by cutting off the correlation item in system (9). The error system of the ith

For the sake of utilizing the results of optimal control, a quadratic performance index function is defined for error system (10)

where
Remark 3
Obviously, the input
From the known conclusion in Katayama et al., 4 Theorem 2 can be proved directly.
Theorem 2
Let us assume that
where

Preview controller design for interconnected systems
The vector
is constructed, where
By substituting equation (14) into system (9), the closed-loop system
can be obtained, here
Next, a sufficient condition is given to assure system (15) asymptotically approaches the zero vector.
Theorem 3
Suppose
Assumption 3 and Assumption 4 hold
Matrix
then, the state vector
Here
where
Proof. First, it is proved that the zero solution of the homogeneous system
corresponding to system (15) is asymptotically stable.
From Katayama et al.,
4
if
Notice
Continuously, use the properties of norms to obtain
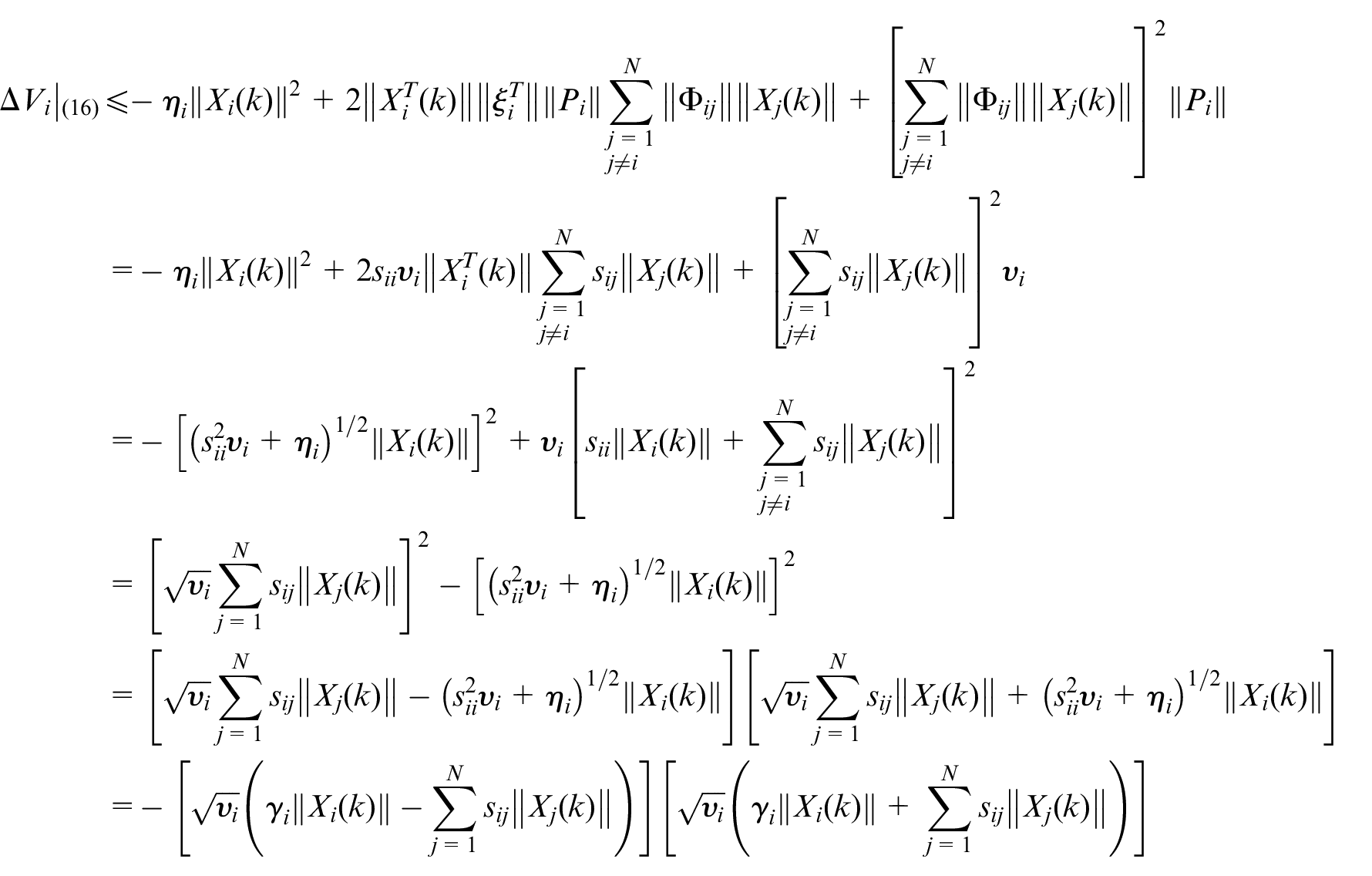
Let
where
According to 3,

Substitute
So,
Using
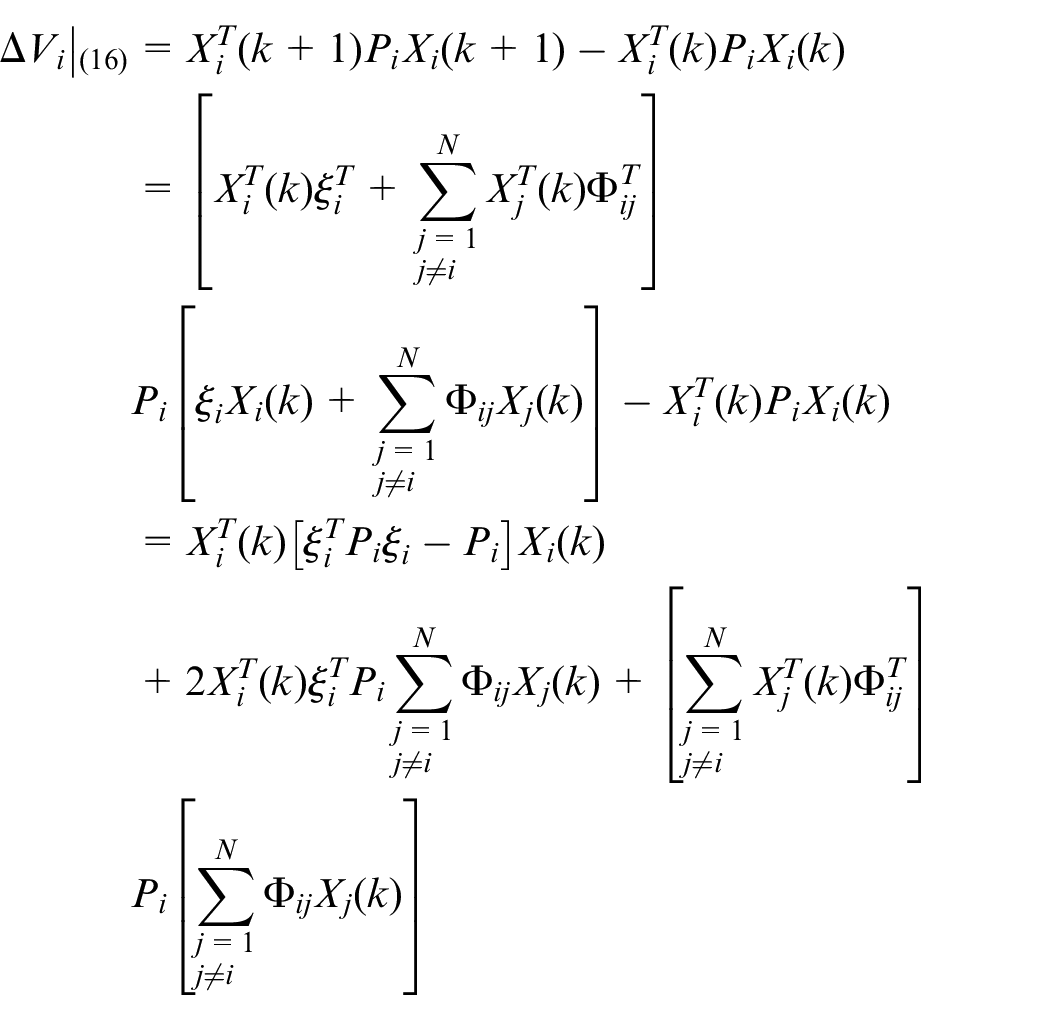
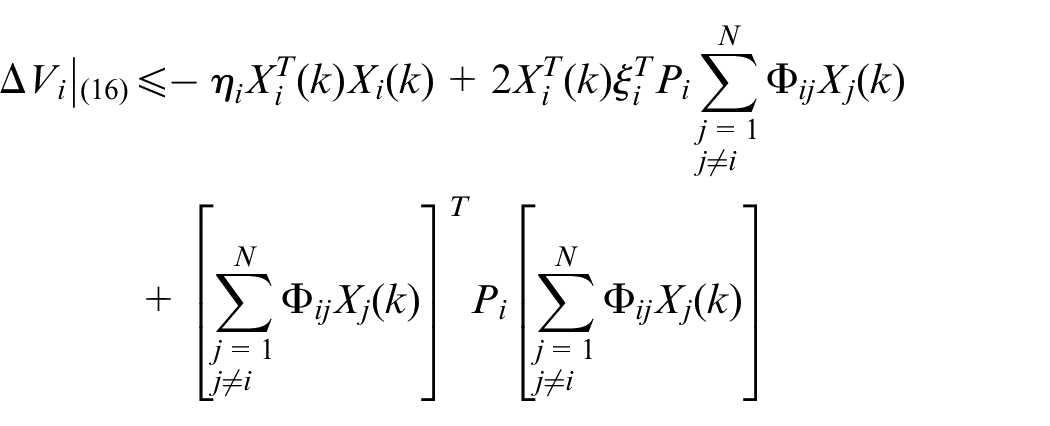
Then, the difference of
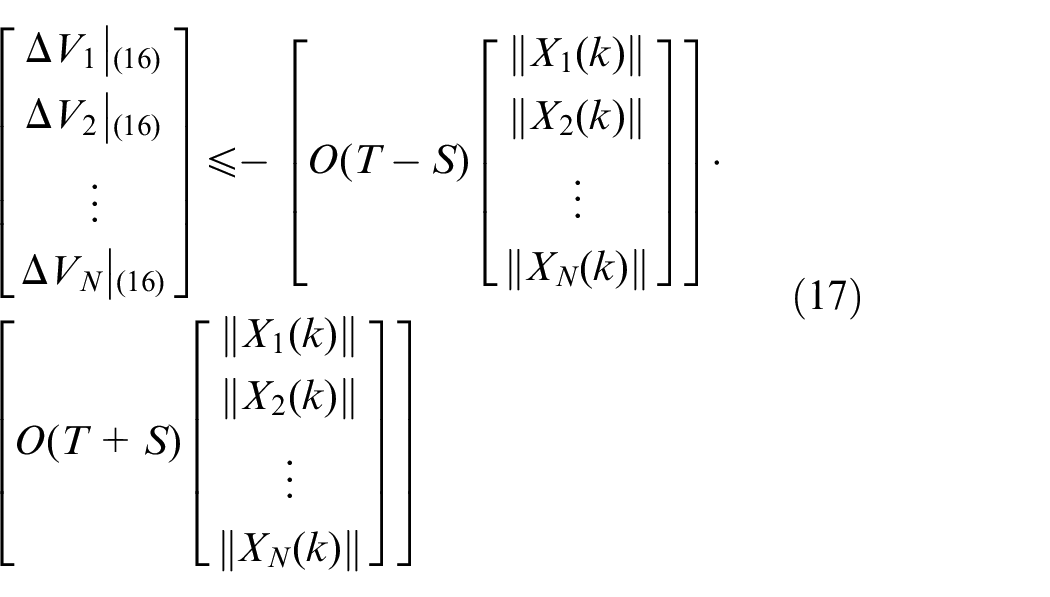
By substituting system (17) and using Property 1, we get
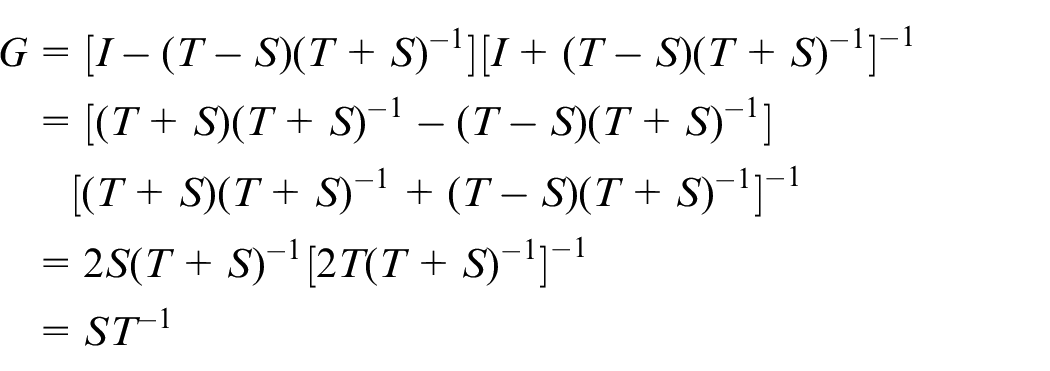
Transform

then,

can be proved by substituting equation (20), and
Then, we prove that
Because system (16) is asymptotically stable and
Below, we use the relevant parameters of interconnected system (2) to give the conditions, which ensure that
According to Katayama et al.,
4
the sufficient and necessary condition for
To sum up, one of the main theorems in this paper is as follows.
Theorem 4
Suppose
Assumption 1 to Assumption 4 hold;
Let
then the controller with preview effect, which enables the output signal of system (2) to track the reference signal asymptotically, is

where
When steps 1–3 of this theorem are true, all the conditions of Theorem 3 are satisfied, so the conclusion of Theorem 3 is true. The controller of system (1) can be achieved by solving
For a given
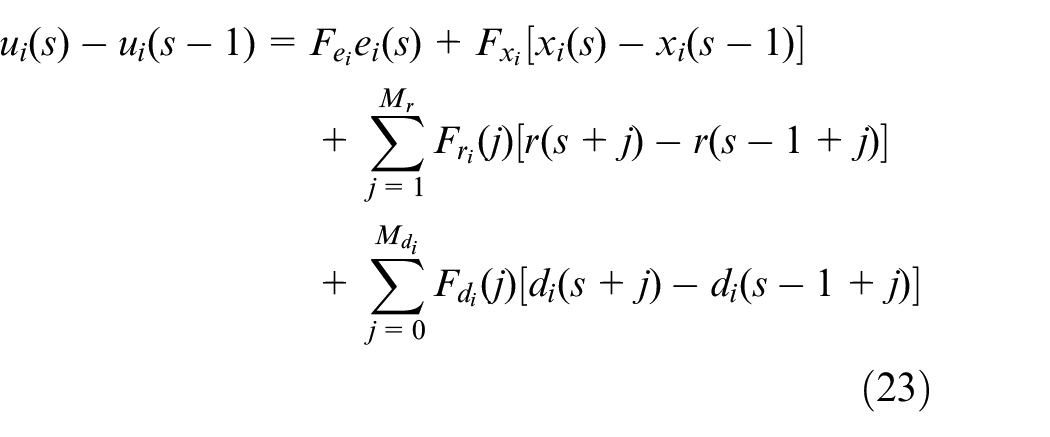
is obtained from equation (12). In equation (23), taking
Remark 4
In equation (22),
Numerical simulation
Two examples are given to illustrate the effectiveness of the designed controller in this section.
Example 1
Consider interconnected system with two subsystems (i.e.
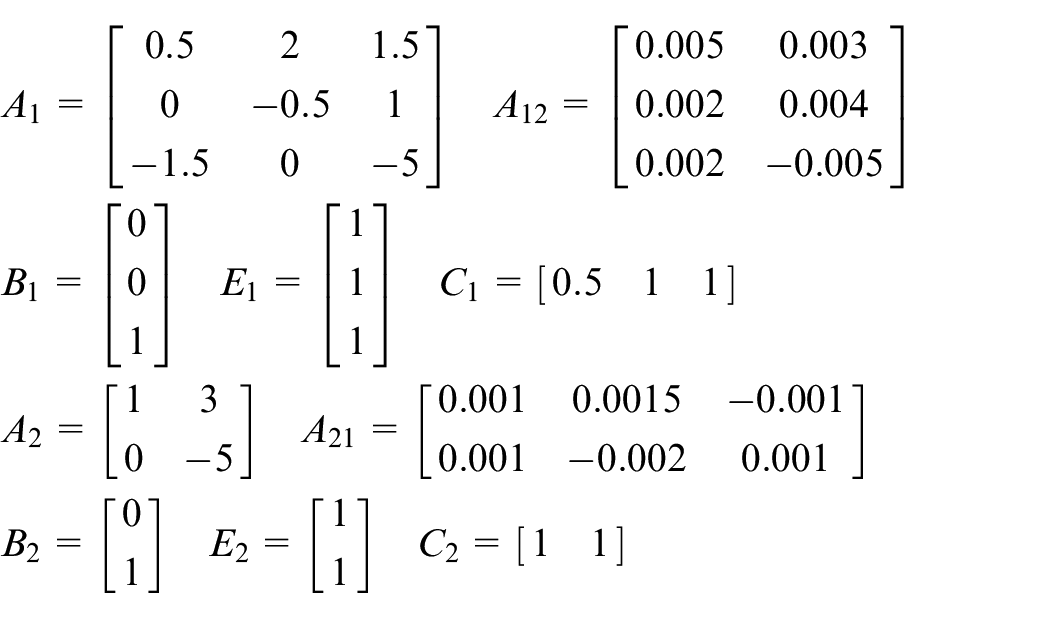
By adopting the Popov-Belevitch-Hautus (PBH) rank criterion, it is known that
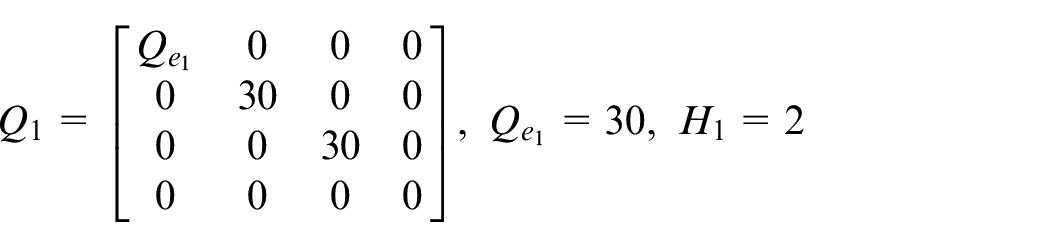
Let the weight matrix of the performance index function of system (11) be

The solution of Riccati equation of two isolated subsystems and the feedback gain matrix of the controller are calculated using MATLAB
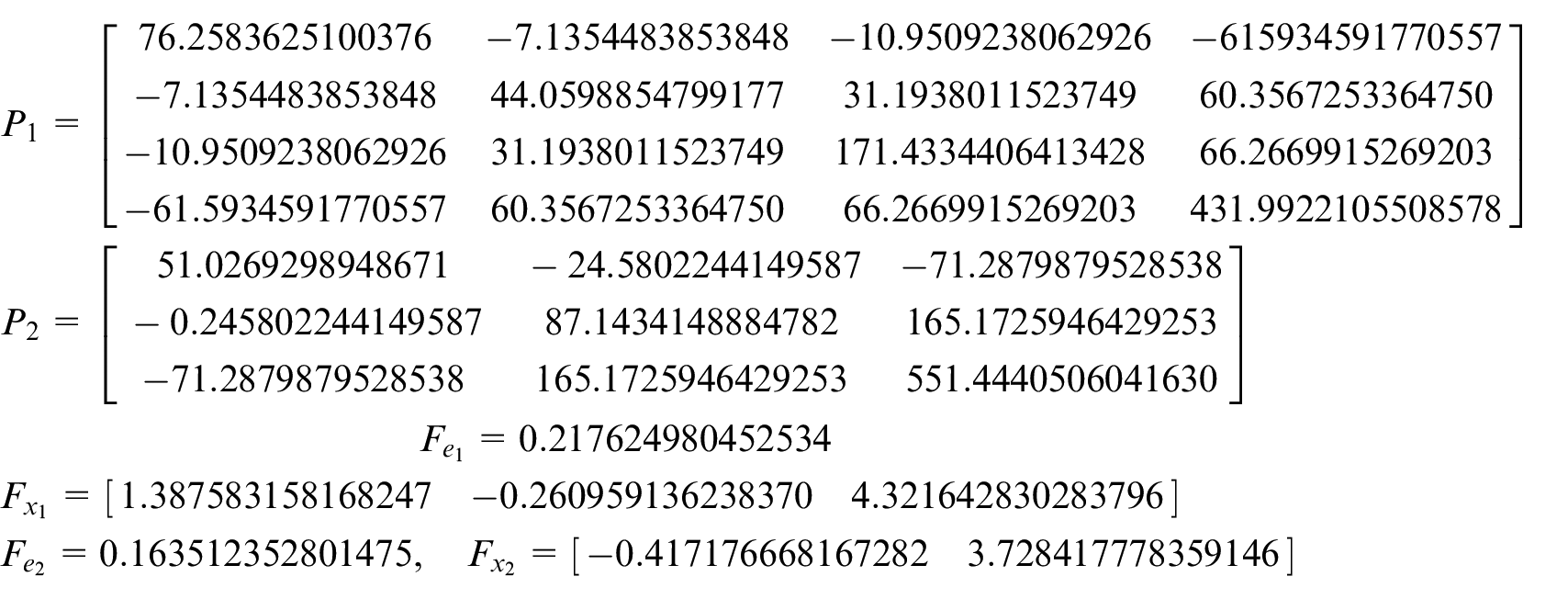
Besides

The eigenvalues of
First, considering the non-disturbance situation, that is,

Let the initial state be
The tracking effect of interconnected system (2) is shown in Figure 1. We can see that the output of interconnected system (2) is able to track
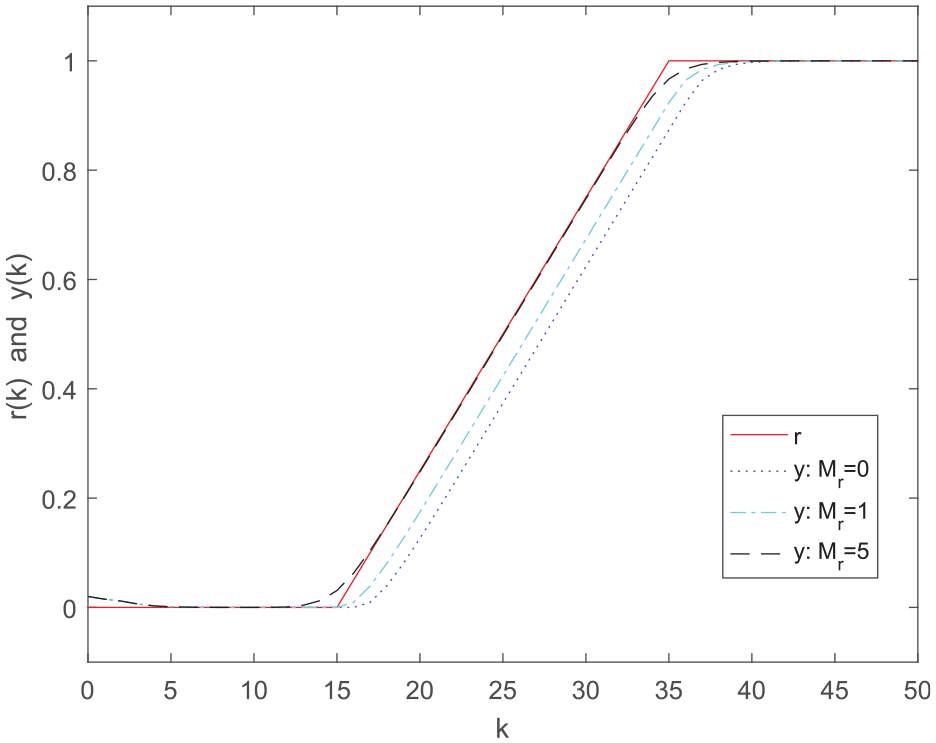
The output response of the interconnected systems without disturbance.
Now, consider the situation with disturbance signals as follow

The reference signal is still in the form of equation (24). At this time, the output curve of the interconnected system is depicted in Figure 2.
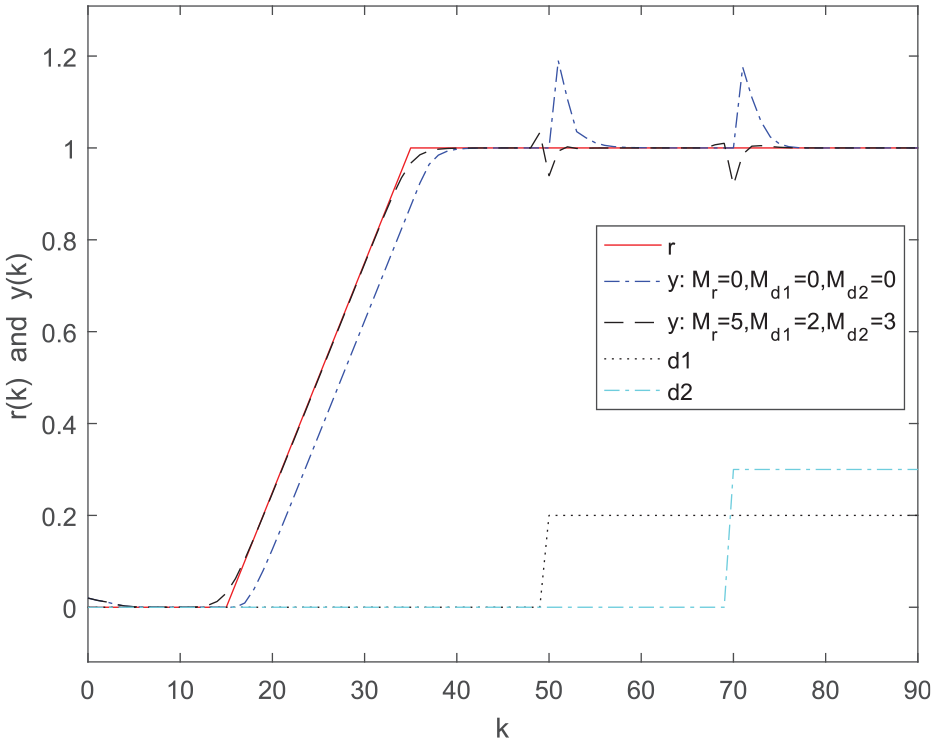
Closed-loop responses of the interconnected system with disturbance.
The tracking error of interconnected system is depicted by Figure 3. It can be clearly seen from Figures 2 and 3 that the output of interconnected system is able to track the reference signal asymptotically, even if there are disturbance signals. Moreover, the controller with preview effect can apparently decrease the tracking error and the overshoot caused by disturbance.
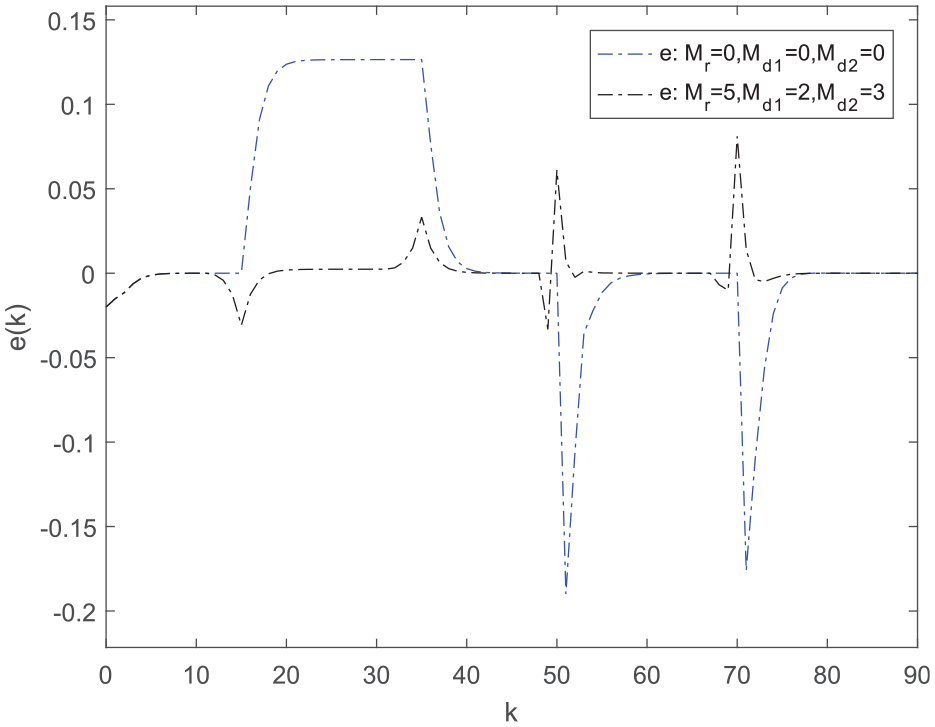
The tracking error of the interconnected system with disturbance.
Example 2
Consider interconnected system (2), where
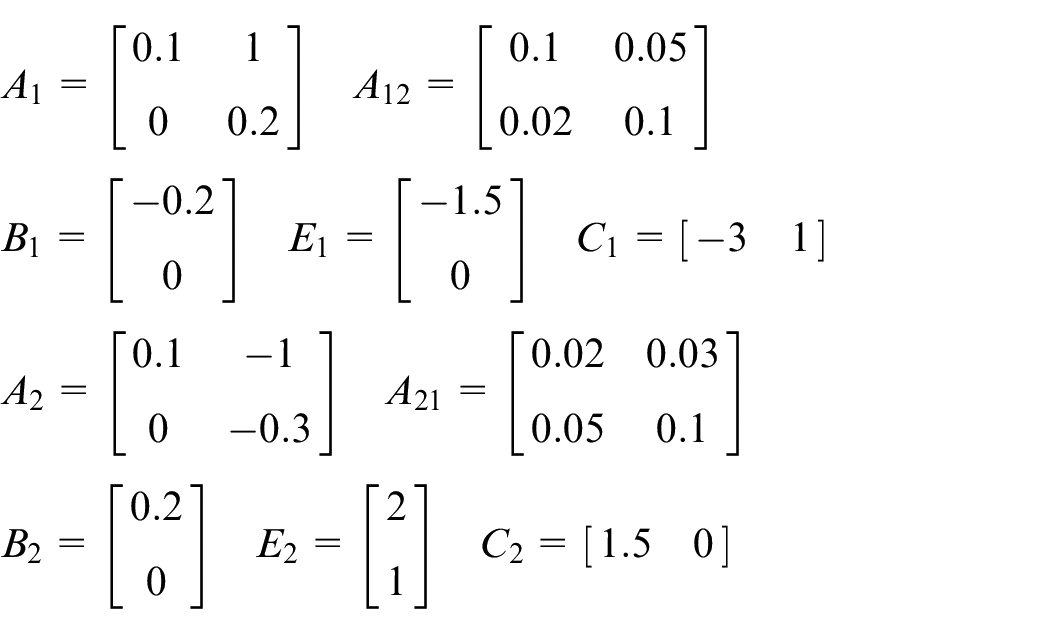
After verification,


Similarly, the solution of Riccati equation for two isolated subsystems and the feedback gain matrix of the controller are obtained
By calculation, there is

Reference signal and disturbance signals are selected as
Selecting
Figure 4 indicated that the
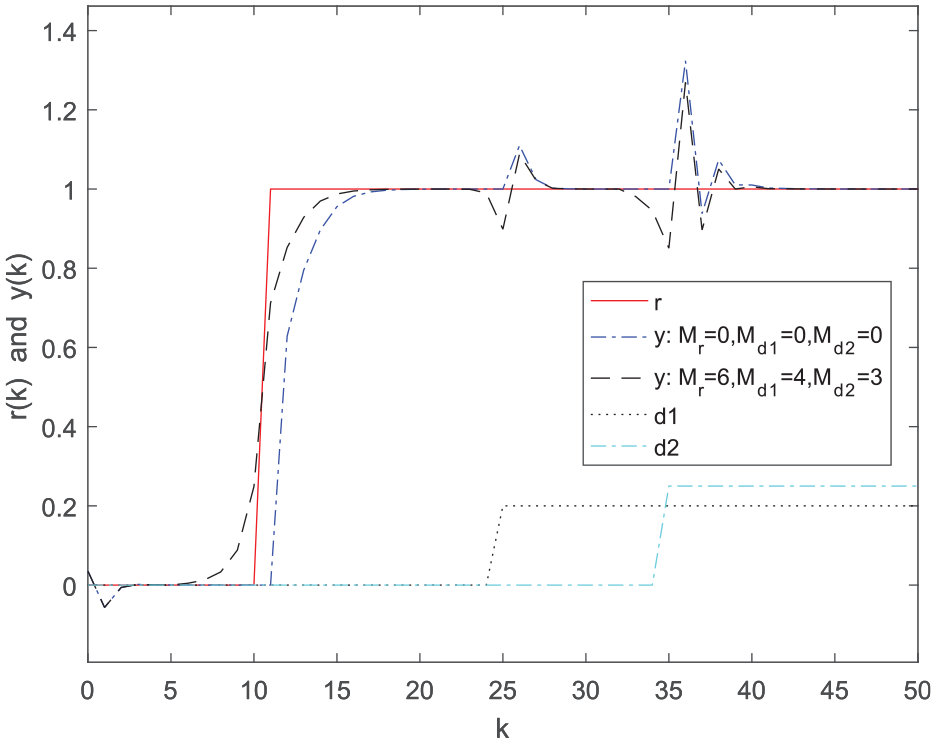
Step response of interconnected system in Example 2.
Conclusion
This paper investigates the previewable controller for a type of discrete-time interconnected systems. Initially, using the basic scheme of preview control, the previewable controller is designed for the error system of each isolated subsystem. Then, the controller of the error system of the isolated subsystem is combined as the controller of error interconnected system. In resort of Lyapunov function and the properties of non-singular M-matrix, the stability of error interconnected system is discussed, then the criterion to ensure its stability is given. Finally, the guarantee conditions for the existence of the preview controller, then the controller for the original interconnected system are derived. The theoretical results and numerical simulation show that the designed controller is able to make the output of the system to track reference signal without static error regardless of the existence of the disturbance signal, and the tracking performance is improved with the increase of the preview steps.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Oriented Award Foundation for Science and Technological Innovation, Inner Mongolia Autonomous Region, China (Grant no. 2012) and National Key R&D Program of China (Grant no. 2017YFF0207401).