
Abstract
In this paper, we deal with the adaptive stochastic synchronization for a class of delayed reaction–diffusion neural networks. By combing Lyapunov–Krasovskii functional, drive-response concept, the adaptive feedback control scheme, and linear matrix inequality method, we derive some sufficient conditions in terms of linear matrix inequalities ensuring the stochastic synchronization of the addressed neural networks. The output coupling with delay feedback and the update laws of parameters for adaptive feedback control are proposed, which will be of significance in the real application. The novel Lyapunov–Krasovskii functional to be constructed is more general. The derived results depend on the measure of the space, diffusion effects, and the upper bound of derivative of time-delay. Finally, an illustrated example is presented to show the effectiveness and feasibility of the proposed scheme.
Introduction
During the past two decades, chaos synchronization has been widely studied since it was introduced by Pecora and Carroll 1 in 1990. Research on the synchronization and control of coupled chaotic systems has received considerable attention due to its potential applications in many different areas including secure communication, chemical and biological systems, chaos generators design, biological systems, information science, image processing, human heartbeat regulation, and so on.2–8 As we all know, chaotic systems exhibit sensitive dependence on initial conditions. In view of this, chaotic systems are difficult to be synchronized or controlled. Thus, to make two or more chaotic systems achieve synchronization has been an interesting and challenging issue. To date, a wide variety of approaches for the synchronization or control of chaotic systems have been investigated mainly including adaptive control,2,4 PI-type learning algorithm, 7 feedback control, 5 and so on. In Huynh et al., 7 learning algorithm was applied to online tune the parameters and a Lyapunov function was used to guarantee the considered system’s stability. The proposed control system was employed to synchronize two chaotic systems and to control an inverted pendulum.
Recently, there has been increasing interest in the potential applications of the dynamics of neural networks (NNs) in signal and image processing. Among the most popular models in the literature of NNs is continuous time model described by a system for ordinary differential equations.9,10 NNs have been verified to exhibit chaotic behaviors if the NNs’ parameters and time delays are appropriately chosen. As this chaotic behavior may affect the synchronization, there has been a growing research interest in the study of the synchronization of chaotic NNs. It is inspiring that many important works on the synchronization of chaotic NNs have been reported in the literature.5,11,12 Strictly speaking, diffusion effects cannot be avoided in the NNs when electrons are moving in asymmetric electromagnetic fields. Therefore, it should be considered that the activations vary in space as well as in time. In the literature,13–21 the stability of NNs with reaction diffusion terms has been considered. The synchronization control problems of NNs with reaction–diffusion terms have been widely studied.22–26 In Li et al., 22 an adaptive synchronization controller was obtained to achieve exponential synchronization for a class of reaction–diffusion neural networks (RDNNs) with time-varying and distributed delays using the Lyapunov functional method and Young’s inequality. In Wang and Ding, 25 the synchronization schemes for delayed non-autonomous reaction–diffusion fuzzy cellular NNs were considered. Based on the simple adaptive controller, some sufficient conditions to guarantee the synchronization were obtained.
However, stochastic phenomenon usually appears in the electrical circuit design of NNs. NNs could be stabilized or destabilized by certain stochastic inputs.20,21 Thus, it is important to consider stochastic effects to the chaos synchronization control of NNs with delays. Based on the above analysis, for synchronization analysis of RDNNs, the diffusion effects cannot be neglected. So, the synchronization criteria including diffusion parameters are more reasonable. However, to the best of our knowledge, there are few, or even no, results dependent on diffusion terms concerning adaptive synchronization of the delayed RDNNs, which is very important in both theories and applications and also is a very challenging problem.
In this paper, we will investigate the adaptive stochastic synchronization of RDNNs with mixed time delays. By constructing suitable Lyapunov–Krasovskii functional, combing the adaptive control and output coupling with delay feedback, drive-response concept, some analysis techniques, and linear matrix inequality (LMI) approach, the sufficient conditions in terms of LMIs are derived to ensure adaptive stochastic synchronization of the addressed RDNNs. In the literature,22–26 the stochastic synchronization problem for a class of drive-response RDNNs is solved without the states information. The main contribution of this paper is an adaptive output coupling with memory synchronization scheme, and the update laws of parameters for feedback control are proposed. Our results improve and extend some of existing results. We also provide a numerical example to demonstrate the effectiveness and applicability of the studied synchronization schemes.
Throughout this paper,
Problem formulation and preliminaries
In this paper, a class of delayed NNs with reaction–diffusion terms is described by the following partial differential equations
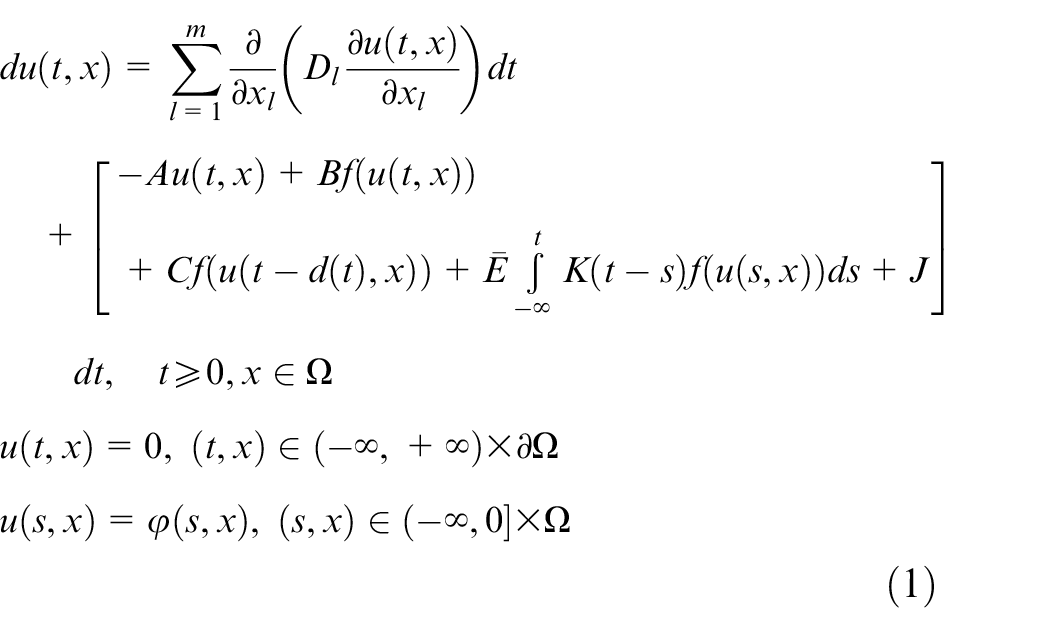
where
In order to observe the synchronization behavior of drive system (1), the response system with stochastic perturbation is designed as
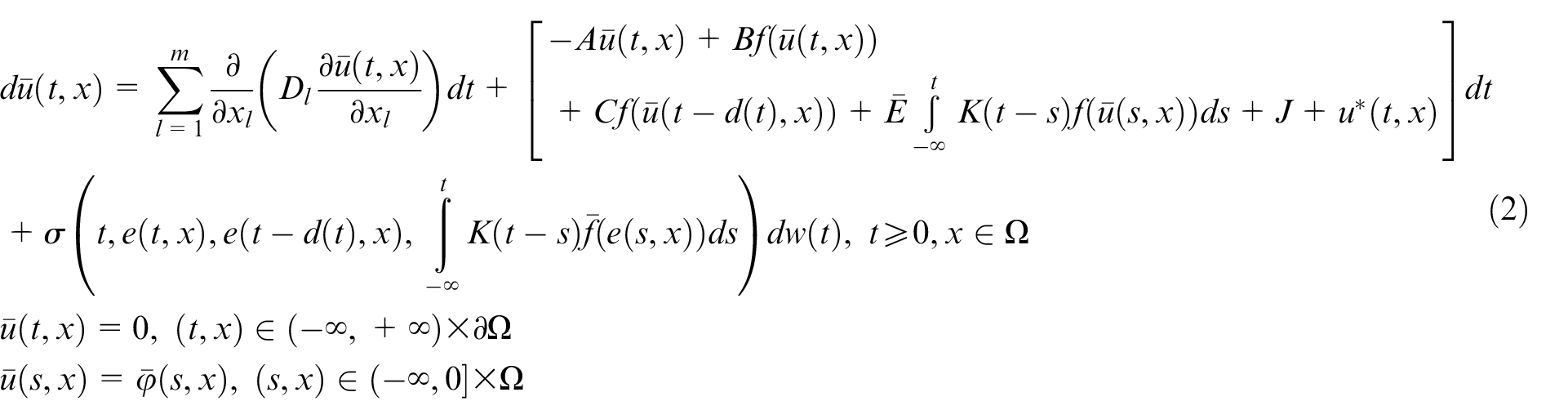
where
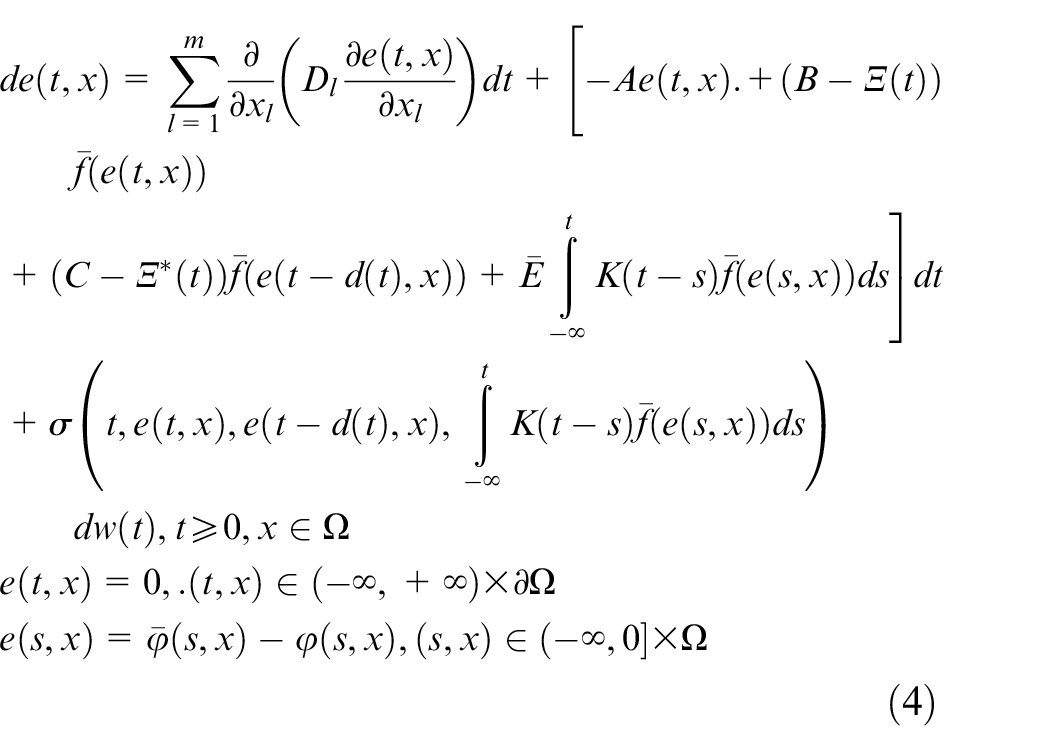
Define

where
Remark 1
In many applications, the authors in theliterature22–26 are interested in the state-feedbackcontroller or time-delay feedback controller designed as
Remark 2
Comparing with the model recently discussed in Wang and Cao,
24
our model is more general than those given in Wang et al.
26
Actually, if we take
In this paper, the following assumptions are made.
Assumption 1
Activation functions

for all
Assumption 2
The matrix

where
For the sake of simplicity, we denote
Let
where
and

Definition 1
The drive system (1) and the response system (2) are said to be asymptotically synchronized if there exists a constant
Lemma 1
Let

Lemma 2
For any real matrices

Main results
Theorem 1
Under Assumptions 1 and 2, the two coupled RDNNs (1) and (2) can be synchronized, if the feedback strength

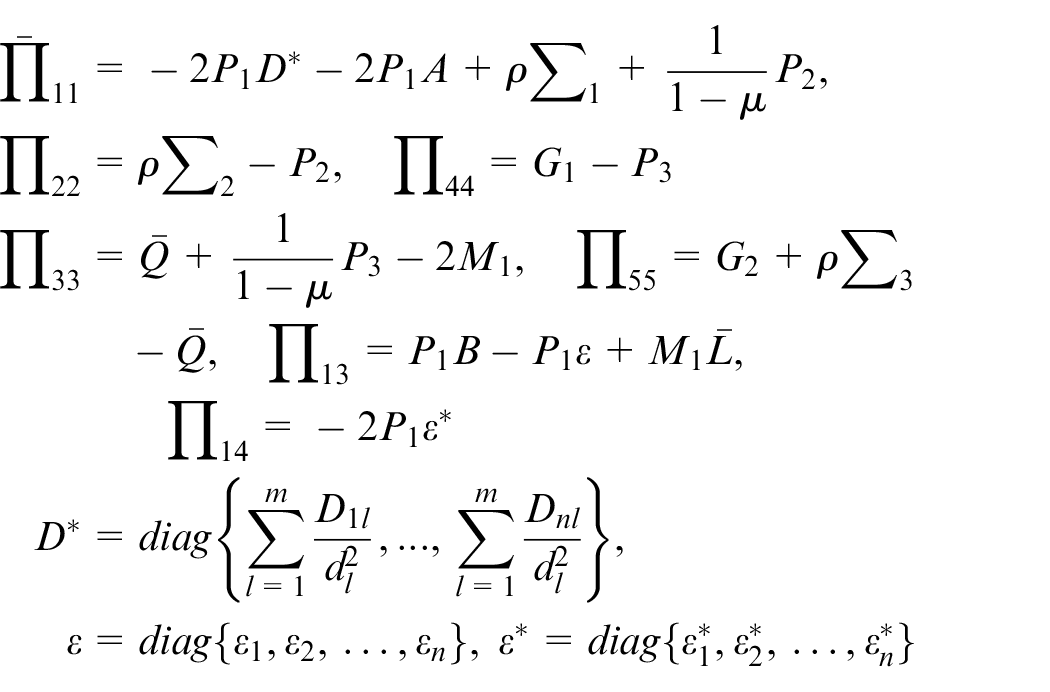
where

where
Proof
Consider Lyapunov–Krasovskii functional as

where
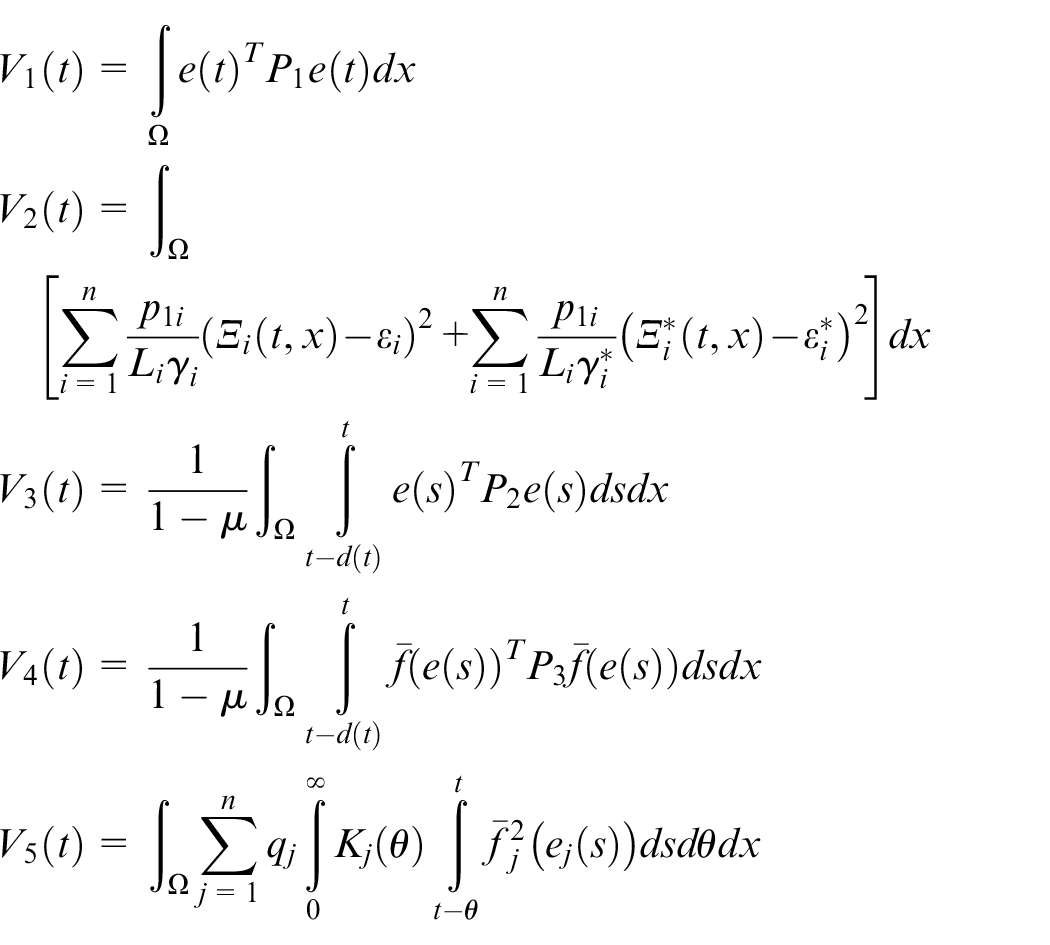
in which
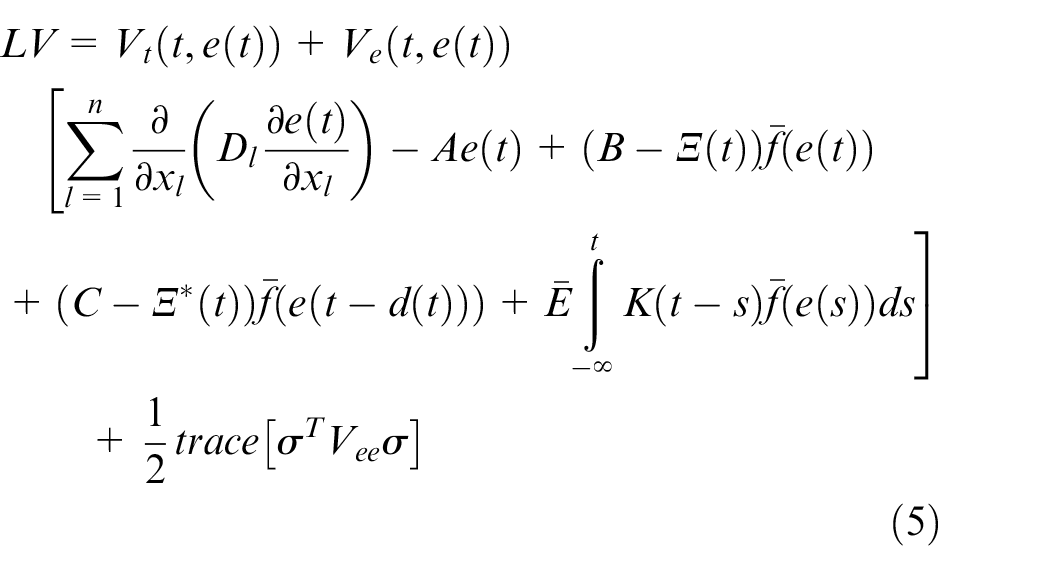
One can calculate
Using Assumption 1, for some constants
By

From Lemma 2, we have

From Green’s formula, the Dirichlet boundary conditions, and Lemma 1, we get
From Assumption 1, we have

where
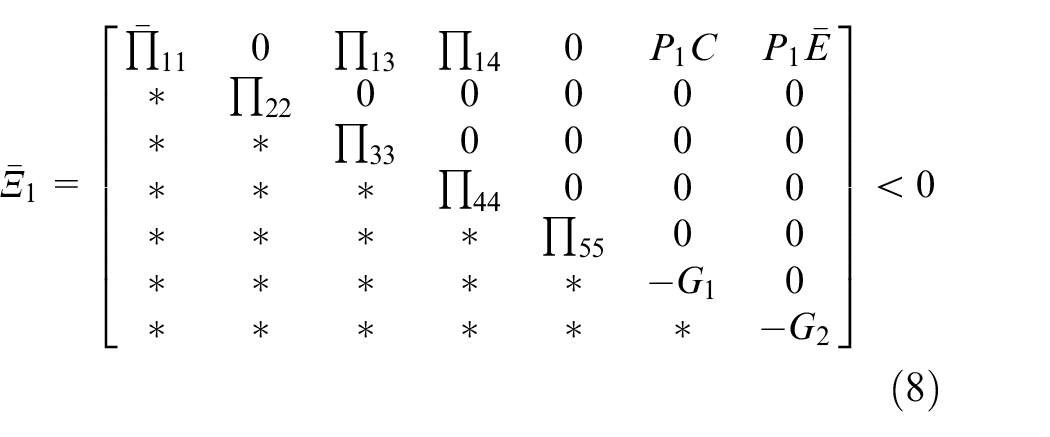
Substituting equations (9) and (11)–(18) into equation (10), and then by Assumption 2, it can be derived
where
By Schur complement and our assumption,
So, there exists
Remark 3
It is well-known that the choice of an appropriate Lyapunov–Krasovskii functional is crucial for deriving stability and bounded real criteria and, as a result, for obtaining a solution to various control problems. Special forms of Lyapunov–Krasovskii functionals lead to simpler delay-independent and delay-dependent finite dimensional conditions in terms of LMIs. In proof of Theorem 1, the new Lyapunov–Krasovskii functional to be constructed is more general. The adaptive synchronization criteria in the literature22–24 are independent on the measure of the space and diffusion effects. However, in this paper, the obtained results are dependent on the measure of the space and diffusion effects. It is noted that Theorem 1 only depends on the upper bound of derivative of time-delay. Therefore, it is shown that the newly obtained results are less conservative and more applicable than the existing results.22–24
Remark 4
The direct Lyapunov method is a powerful tool for studying systems stability. It remains helpful for the determination of synchronization conditions when some parameters are uncertain. In Theorem 1, we propose the adaptive synchronization for a class of stochastic RDNNs with time-varying delays and unbounded distributed delays. To the best of authors’ knowledge, up to now, this model has not been investigated for the stochastically adaptive asymptotical synchronization problem. Thus, our results are general and significant in practice.
When the smooth operator
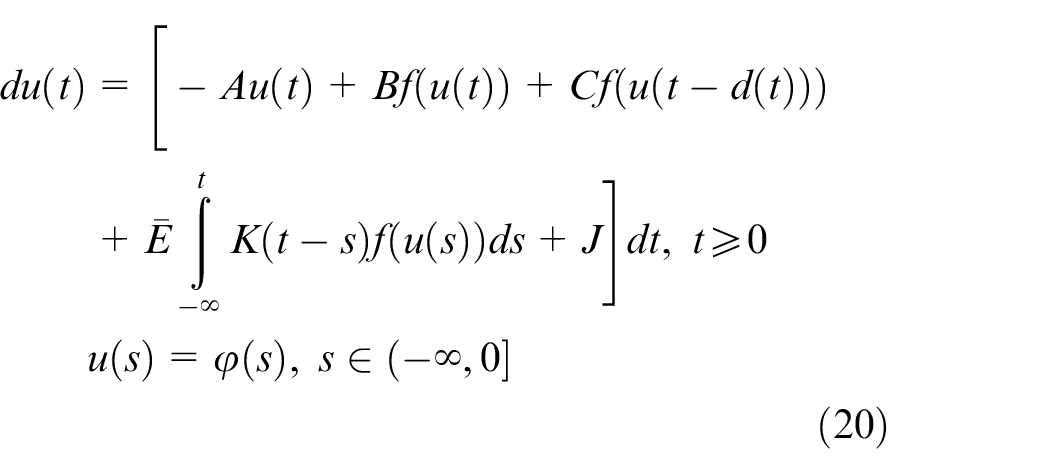
and
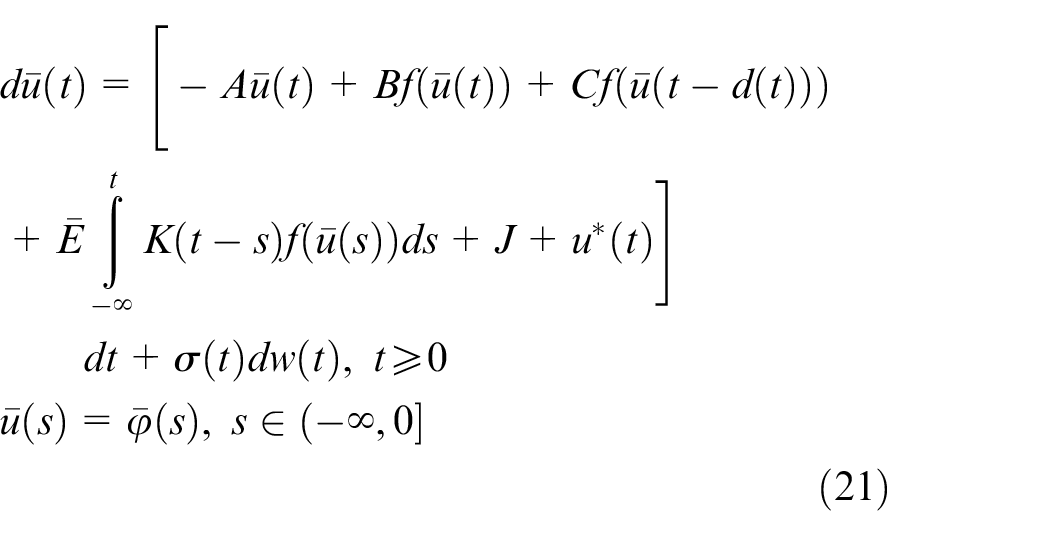
We have the following corollary.
Corollary 1
Under Assumptions 1 and 2, the two coupled NNs (equations (20) and (21)) can be synchronized in the mean square sense if the feedback strengths

and there exist positive definite diagonal matrices
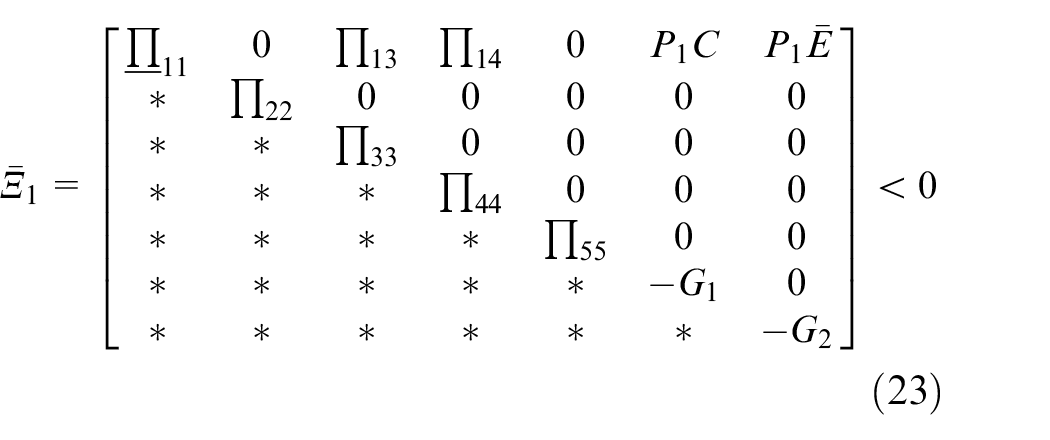

where
Remark 5
When the smooth operator
A numerical example
In this section, we give an example with numerical simulations to illustrate the effectiveness of the theoretical results obtained above.
Example 1
Consider the drive-delayed NNs (equation (1)) with reaction–diffusion terms, the response stochastic delayed NNs (equation (2)) with reaction–diffusion terms, and the error system (4) with the network parameters given as follows
By simple computation, we have
Let the initial conditions be
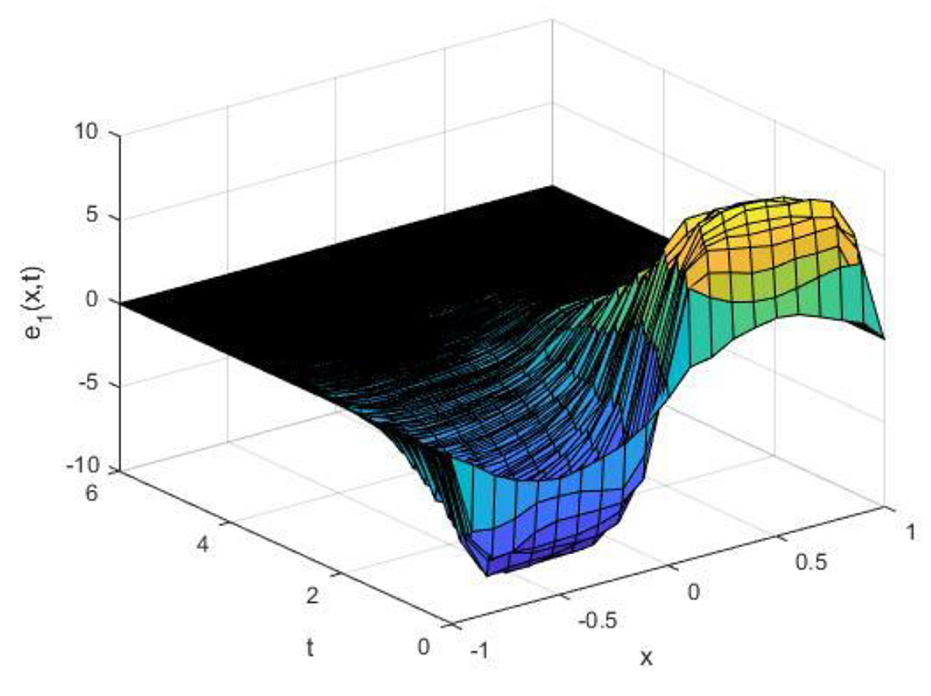
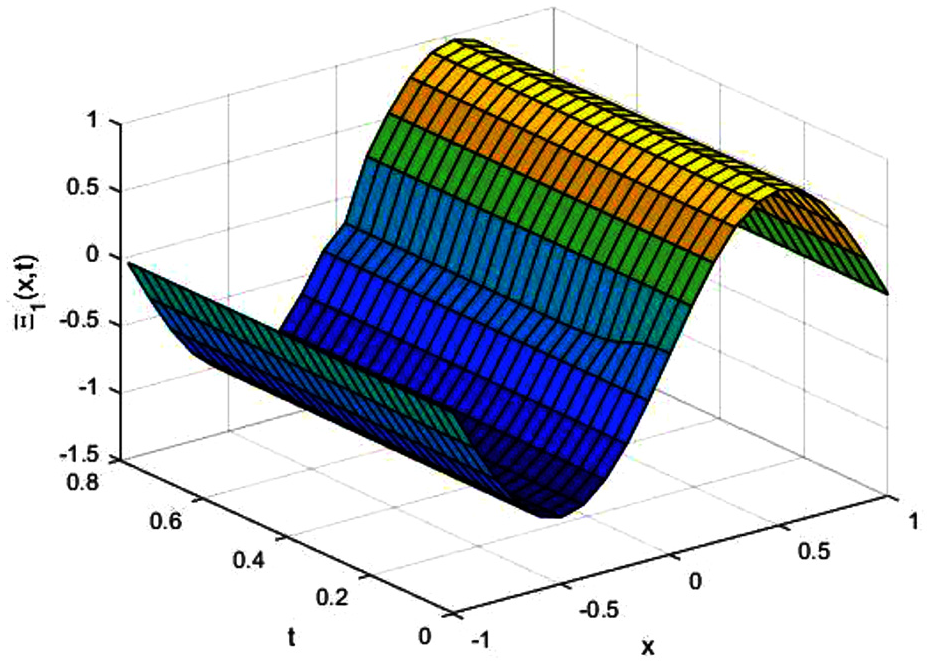
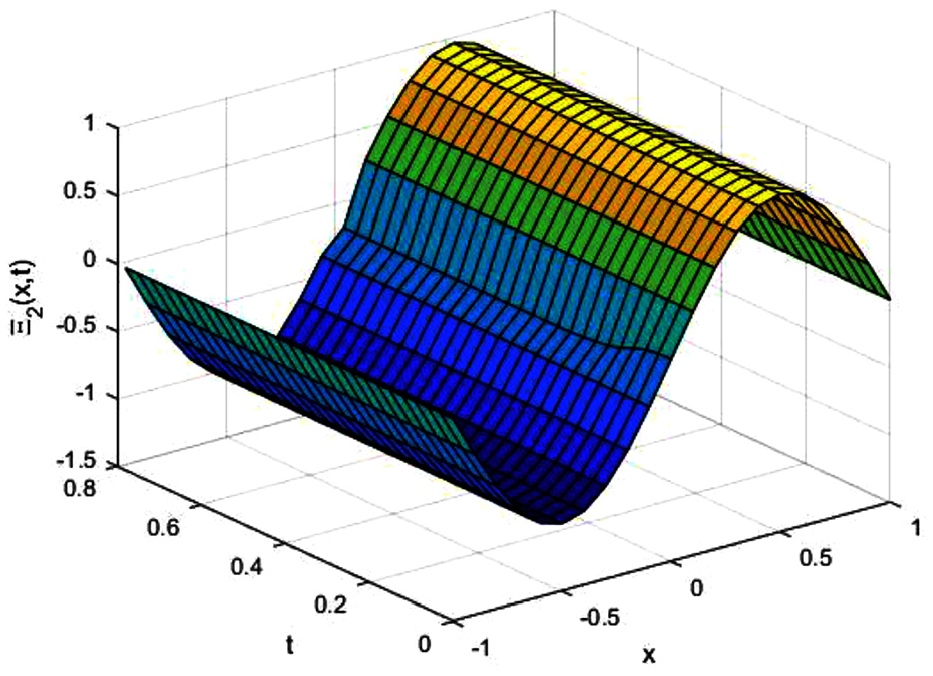
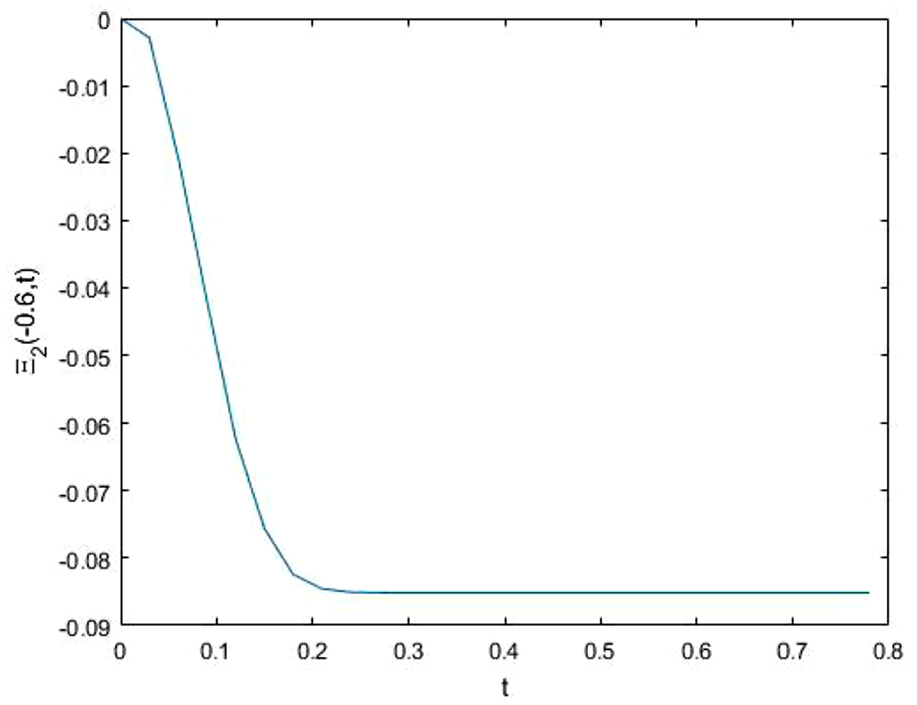
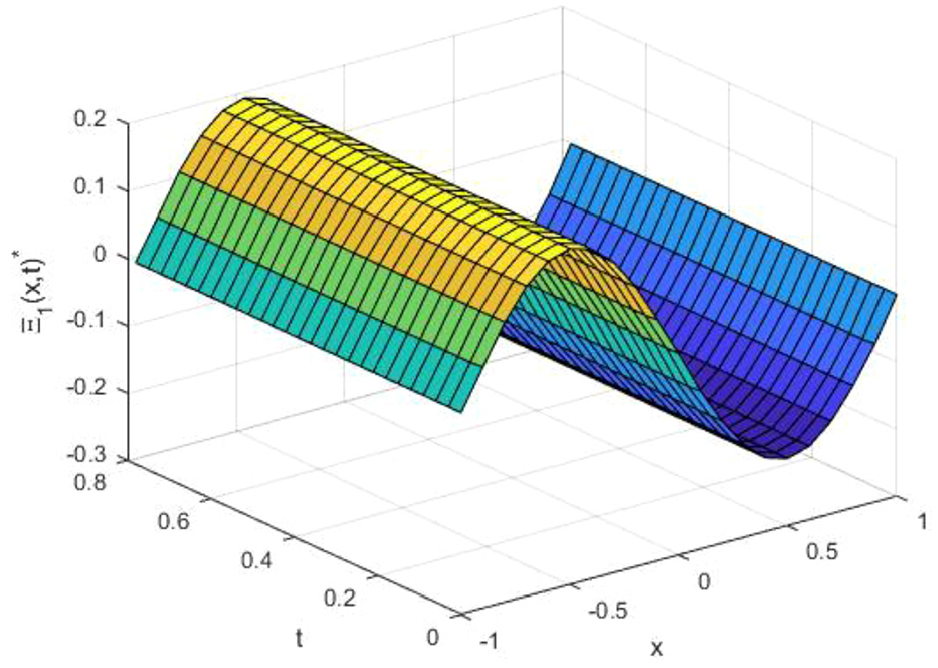
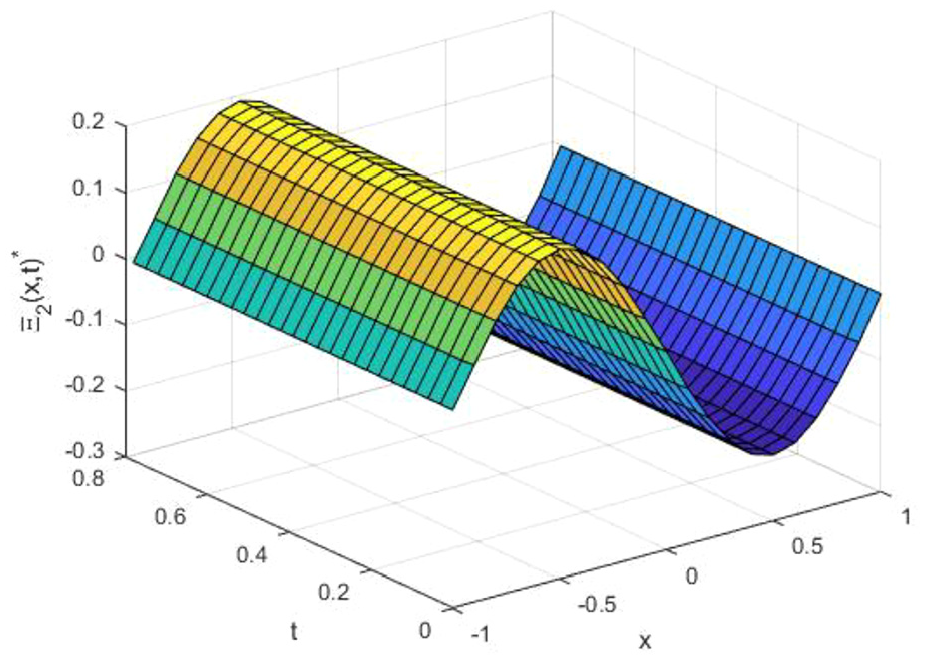
After 10 times operations, the average simulation results can be shown in Figures 1–14, where Figures 1 and 2 show the state surfaces of
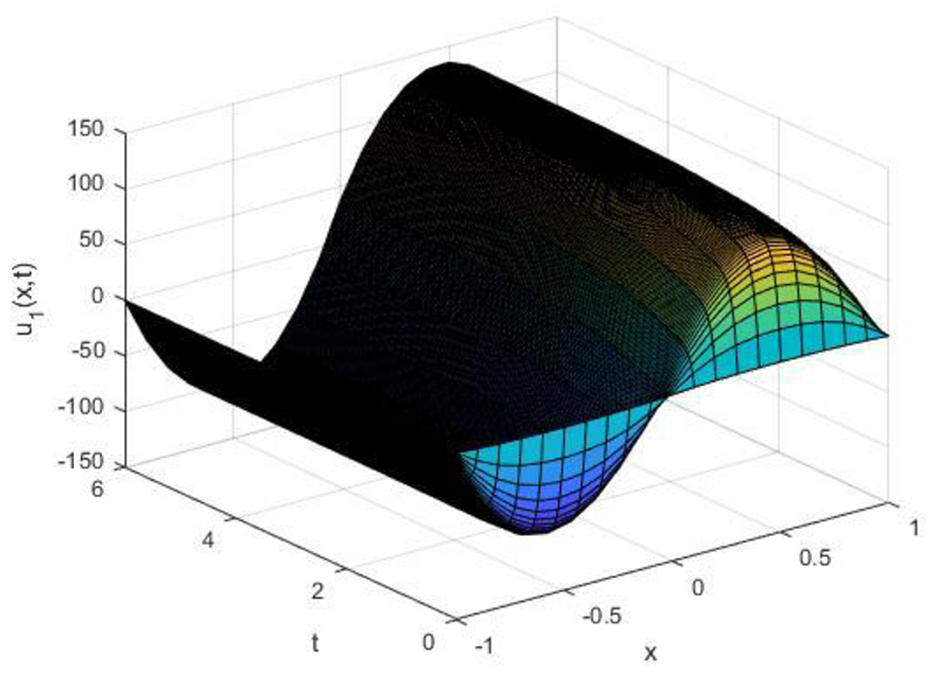
The state surface of
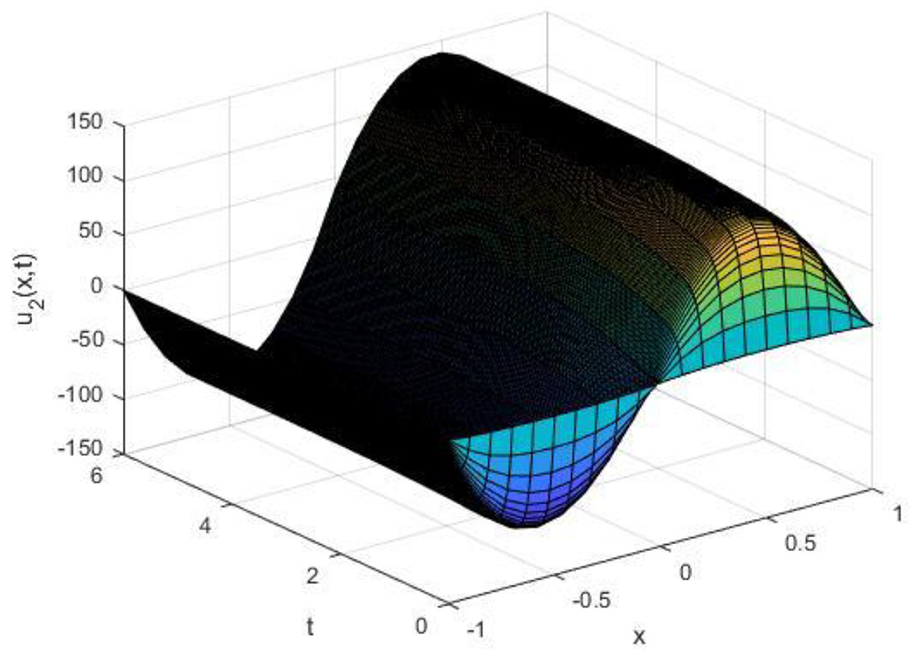
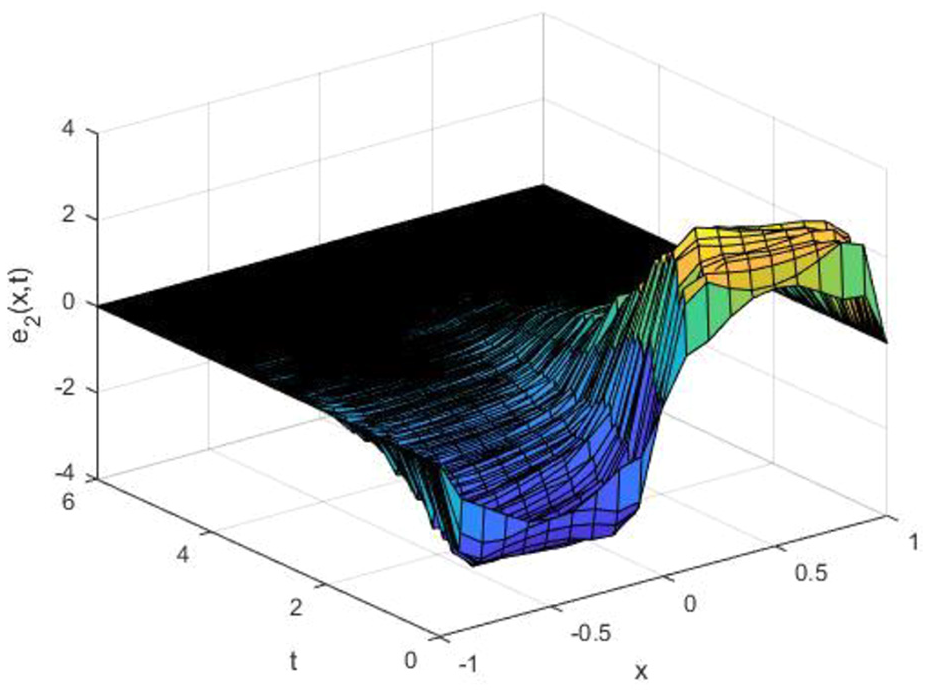
The state surface of
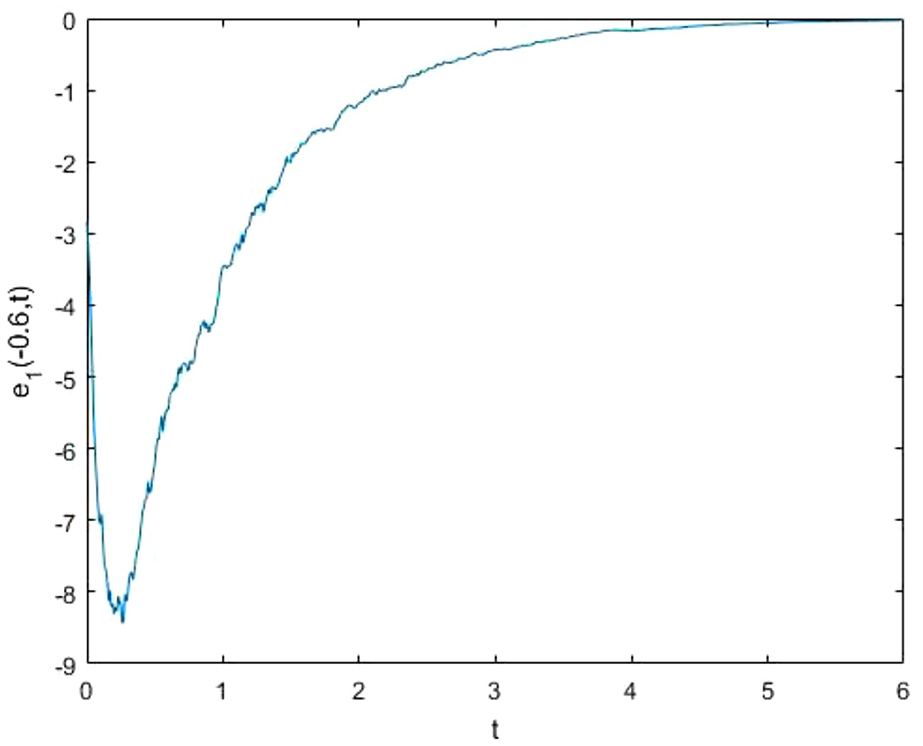
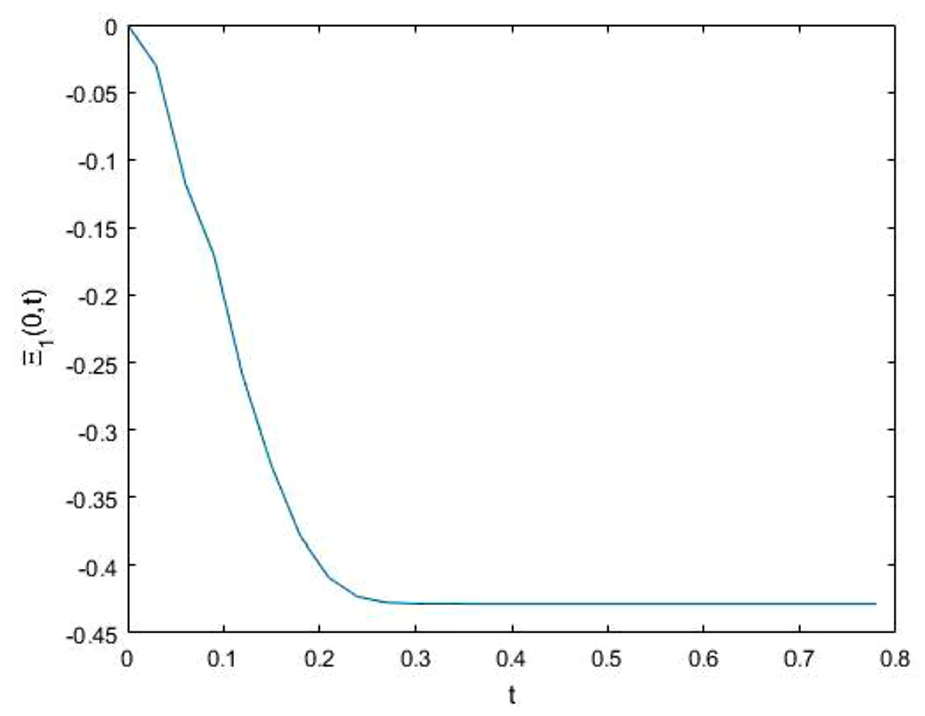
Synchronization error
Synchronization error
Synchronization error
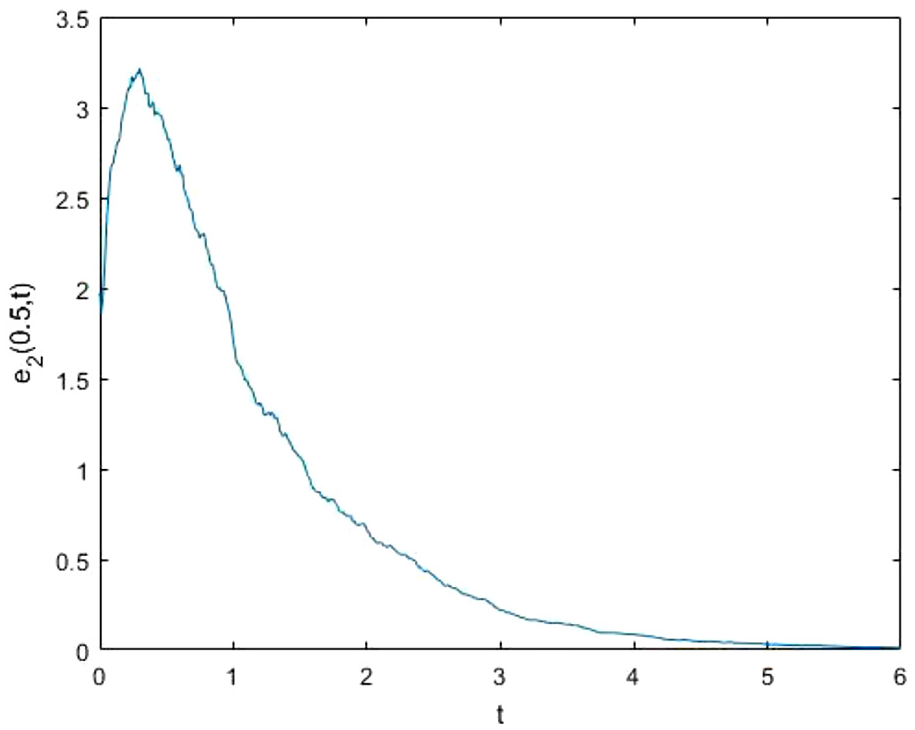
Synchronization error
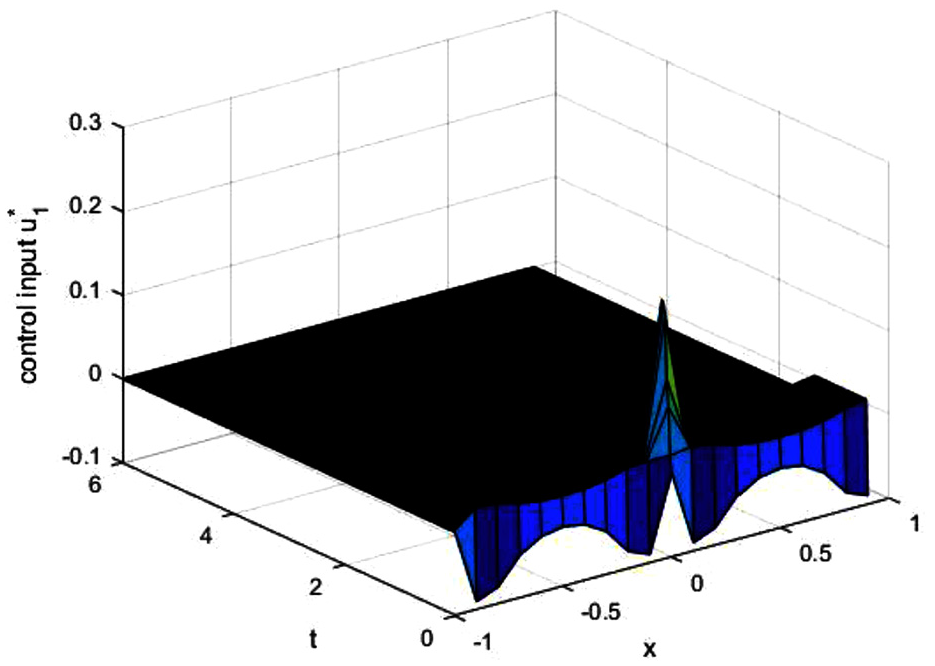
Control surface of

Control surface of
Dynamic curve of the parameter estimation
Dynamic curve of the parameter estimation
Dynamic curve of the parameter estimation
Dynamic curve of the parameter estimation
Dynamic curve of the parameter estimation
Dynamic curve of the parameter estimation
Conclusion
In this paper, we have investigated the adaptive synchronization problem for a class of stochastic RDNNs with time-varying delays and unbounded distributed delays. We have proposed a novel adaptive control scheme for asymptotic synchronization by utilizing Lyapunov–Krasovskii functional theory with stochastic analysis and LMI approaches as well as the adaptive feedback control technique. The issue considered in this paper is more general in many aspects, for it incorporates as special cases various problems which have been studied extensively in the literature. Some remarks and one numerical example have been applied to demonstrate the effectiveness of the obtained results.
In fact, it is worth mentioning that there are still some important problems to solve for delayed RDNNs. There are two common phenomena in some evolving networks: delay effects and stochastic effects. Stochastic phenomenon usually appears in the electrical circuit design of NNs. In addition, NNs could be stabilized or destabilized by certain stochastic inputs. Since delays and stochastic inputs can heavily affect the dynamical behaviors of NNs, it is necessary to investigate both delay and stochastic effects on the synchronization of NNs. Furthermore, efforts have been made to study the complex dynamics of partial differential system in recent years. In Eisenberg et al., 30 stochastic trajectories are described that underly classical diffusion between known concentrations. In Morita, 31 the stochastic Verhulst equation with a white noise term is treated, in order to calculate the average value of the population as a function of time, which is expressed analytically in a finite series with an arbitrary initial value of the population. Unfortunately, to the best of our knowledge, there are few results concerning average value analysis of stochastic trajectories for delayed RDNNs have not yet been proposed. These are interesting problems and will become our future investigative direction.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China under grant no.61573013, the Special Research Projects in Shaanxi Province Department of Education under grant no.17JK0824 and Young and middle-aged top talents projects of Xianyang Normal University under Grant No.XSYBJ201801