This paper deals with the fixed-time tracking control problem of extended nonholonomic chained-form systems with state observers. According to the structure characteristic of such chained-form systems, two subsystems are considered to design controllers, respectively. First of all, using the fixed-time control theory, a controller is proposed to make the first tracking error subsystem converge to zero in bounded time independent initial state. Second, a state observer is proposed to estimate the unmeasurable states of the second subsystem. And the precise state estimation can be presented from the observer within finite time; moreover, the upper bound of time is a constant independent on the initial estimation error. Third, a fixed-time controller is designed to drive all states of the second chained-form subsystem to zero within pre-calculated time. Finally, the effectiveness of the proposed control scheme is validated by simulation results.
During the past decades, nonholonomic systems have drawn a lot of attention in the control community,1–5 because it has great guiding significance for the practically engineering. Actually, it can be used to model many real systems, such as wheeled mobile robots, autonomous underwater vehicles underactuated arm cranes, offshore-driven marine crane overhead vehicle system and free-floating space robots (see, for example, previous works6–14 and the references therein). However, controlling such systems is a big challenge. As the paper15 points out, we cannot stabilize the nonholonomic system to a point using smooth, or even continuous, static-state feedback approach. Therefore, the mature smooth nonlinear control law cannot be applied to this kind of systems, directly. With the continuous efforts of many researchers, several control methods have been proposed to realize this kind of nonholonomic systems that are asymptotically stable. Time-varying feedback control approaches have been proposed;16–18 nevertheless, the system state converges too slowly. Hence, researchers turned their attention to the possibility of achieving exponential (faster) convergence for nonholonomic systems, discontinuous feedback19,20 and hybrid stabilization.21,22 With the further research on nonholonomic systems, the robustness issue of such systems with drift uncertainties, high-order nonholonomic and multi-intelligent systems, attract researchers’ attention (see previous works23–29 and references therein). However, the above control strategies only achieve asymptotic stability, which means we cannot obtain the convergence time in advance, although Zuo et al.27–29 proposed high-order multi-intelligence and control of the system for determining the convergence time, so that there is a faster convergence speed. In previous works,30–33 finite time control can stabilize systems within finite time, but convergence time was dependent on initial conditions. Polyakov34 proposed fixed-time stability and got over this shortcoming. Compared with the stability problem of the nonholonomic control system, which has been researched deeply, the concern of tracking control problem is less. In fact, it is unclear whether the existing stabilization methods can be applied directly to the tracking problems of nonholonomic systems. Kanayama et al.35 proposed a stable tracking control strategy for an autonomous mobile robot with 2 degrees of freedom, but it is only suitable for solving local tracking problems. With the deepening of research, an adaptive visual servo tracking controller is designed36 to solve the nonholonomic motion constraints of mobile robots. It has been strictly proved that the tracking error converges to zero. Yan et al.37 proposed a robust motion control method based on equivalent input disturbance (EID) method; in this model, the position error control system is controlled by position control and trajectory tracking. Samson38 put forward global trajectory tracking controller for two-wheel-driven nonholonomic cart in Cartesian space. Ye39 applied backstepping idea to the design of the controllers. Chen et al.40 applied a finite-time control technique and the virtual-controller-tracked control law that are to stabilize the simple dynamic nonholonomic robot system. It is worth noting that systems with chain forms and uncertainties are more common and widespread in practical engineering systems, which presents great difficulties in designing controllers. For the extended chained form systems with indefinite parameter and disturbance, a finite-time tracking controller based on chattering-free sliding-mode control technology was proposed.41 Yang and Huang42 used extended state observer to estimate uncertainties. As far as the author knows, there are no published articles that address fixed-time output tracking control for extended nonholonomic chained-form systems with incomplete information based on state observer.
In this paper, the main innovation can be summed up as the following three points:
According to chained-form system structure, we split it into two subsystems. In order to simplify the analysis process, we use state and input transformation for second subsystem, a new chained-form system was obtained.
A state observer is designed to estimate the unavailable state of the second subsystem. For the state observer, the upper bound of the estimated time can be predetermined and does not depend on the initial state.
The proposed controllers can guarantee that the original tracking error system converges to zero within bounded time independent on initial state. Obviously, this control scheme is more suitable for practical engineering with unknown initial conditions for the convergence time which depends on the controller parameters instead of the initial state of the system.
The structure of this article is as follows. Section “Problem statement” presents the problem statement, some assumptions, and lemmas. Section “Main result” provides our main results, including the design of the state observer, the fixed-time controller, and related proof. Simulation results of the proposed control strategy are shown in section “Simulation results.” Finally, section “Conclusion” gives the conclusion.
Problem statement
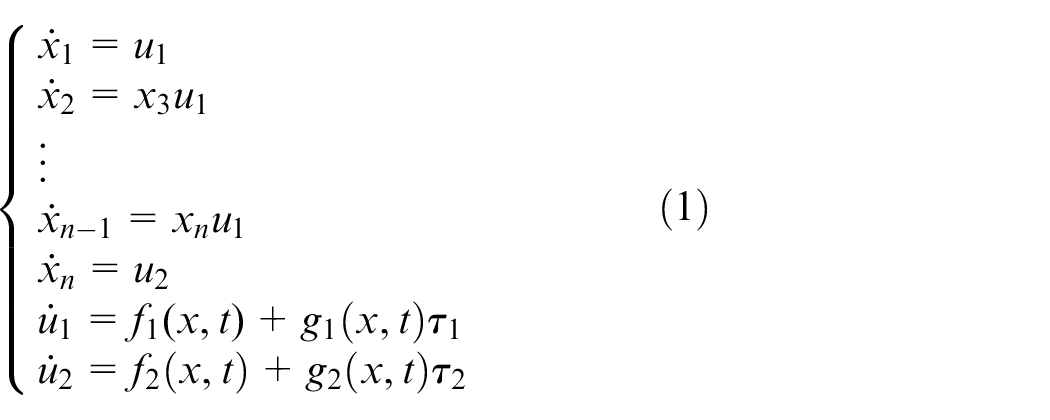
Consider the following extended nonholonomic chained-form system
where can be viewed as the velocity input of the kinematics model,35 and is the generalized torque input.15 is the measured output vector, and denotes the unavailable system state vector. and for all are two measurable smooth nonlinear functions. Suppose that the expected trajectory is . The output tracking error can be expressed as follows
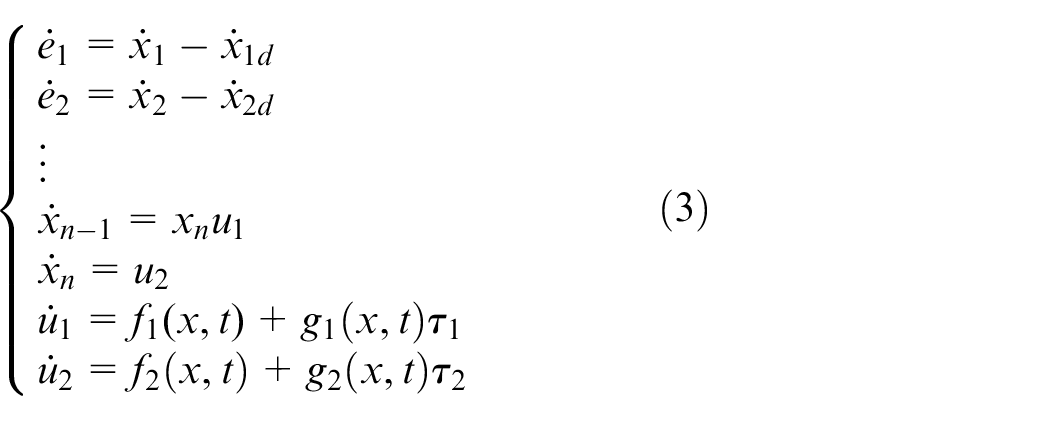
In this paper, the control method is to design controller such that the output tracking error (equation (2)) converges to zero in fixed time. Through some manipulations, we can obtain that the tracking error satisfies following differential equations
Assumption 1
The kinematics speed is measurable. , exist nonzero n-order derivative at any time .
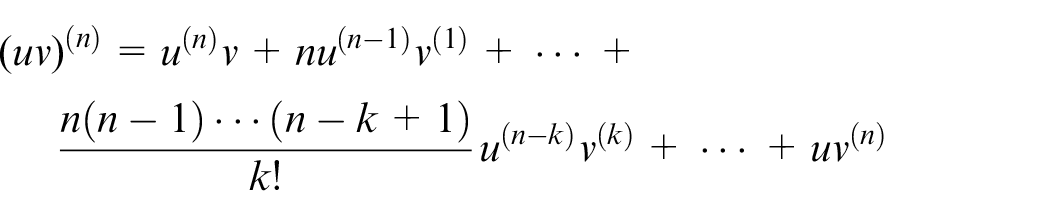
Lemma 1
According to Leibniz formula, if the functions and have n-order derivatives at point , the n-order derivative of can be expressed as follows
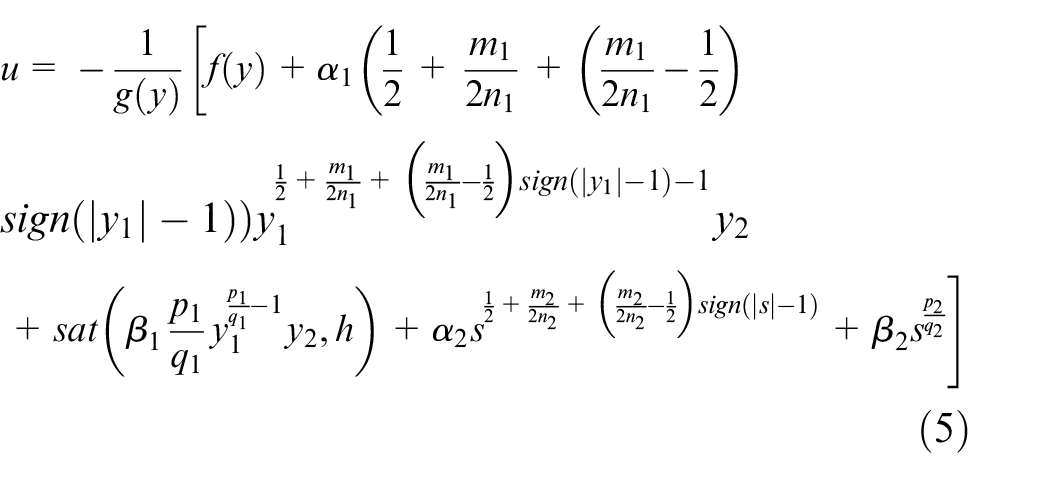
where is the state vector, , are the smooth real vector fields, is the control input. System (4) is fixed-time stable when the control law was designed as
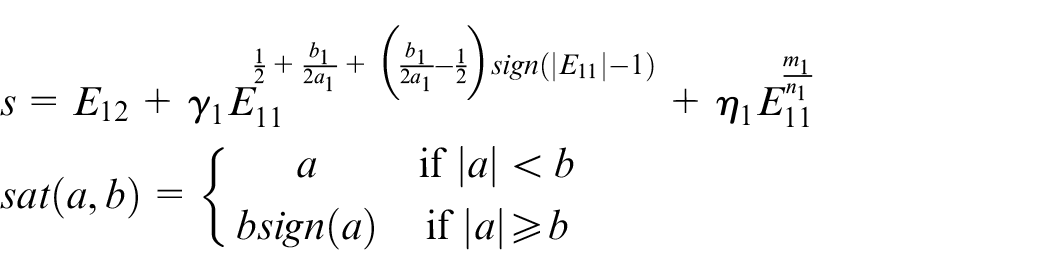
where the positive constants , , , and positive odd integers , , , , , , , satisfying , , , and , , , are positive odd integers. is the sign function, and is a threshold parameter. denotes the sliding mode surface, which is constructed as
Assuming that there exists a continuous function such that the following conditions hold:
is positive definite.
There are real numbers , and an open neighborhood of the origin such that , .
Then, the origin is a finite-time stable equilibrium of the above system (6). If , the origin is a globally finite-time stable equilibrium of system (6).
Lemma 4
Assume that continuous real-valued functions and are homogeneous with regard to of degrees and , respectively.4 And is the positive definite. For each , the following inequality holds
Definition 1
Consider the following differential equation system34
If the origin of system (8) is globally finite-time stable with bounded settling-time function , and , such that , it is said to be fixed-time stable equilibrium point.
Main result
In this section, we consider to design controllers and , respectively. First, we separate system (3) to two subsystems as follows
and
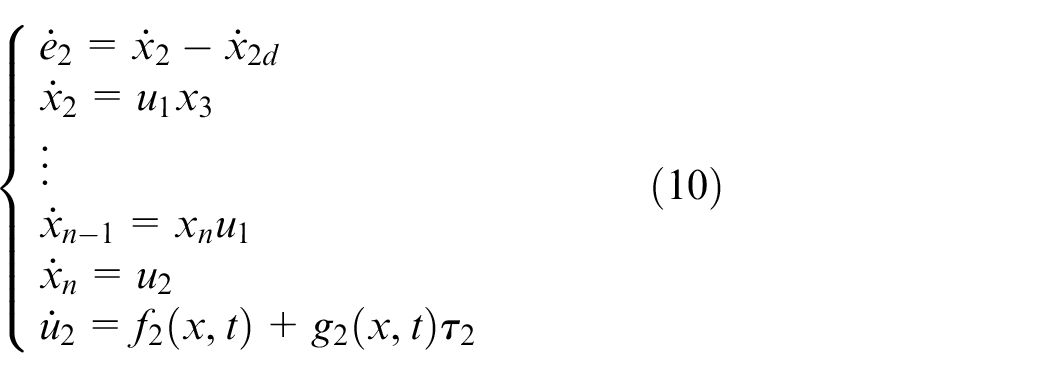
Let , , then system (9) can be rewritten as
And then we’re going to transform subsystem (10) for simplifying analysis process: if we design a controller to drive converge to zero in finite time , which means as , then we can substitute of into equation (10), and let , we obtain
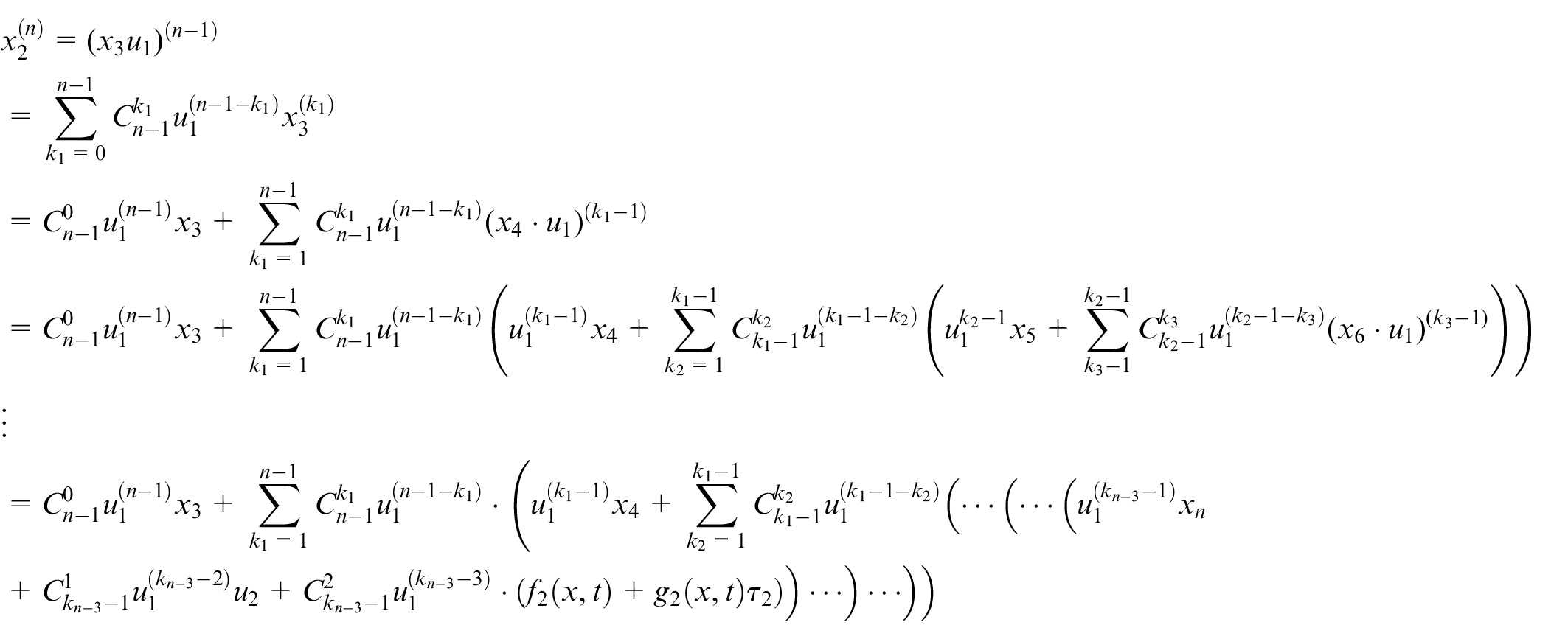
According to Lemma 1, we can obtain
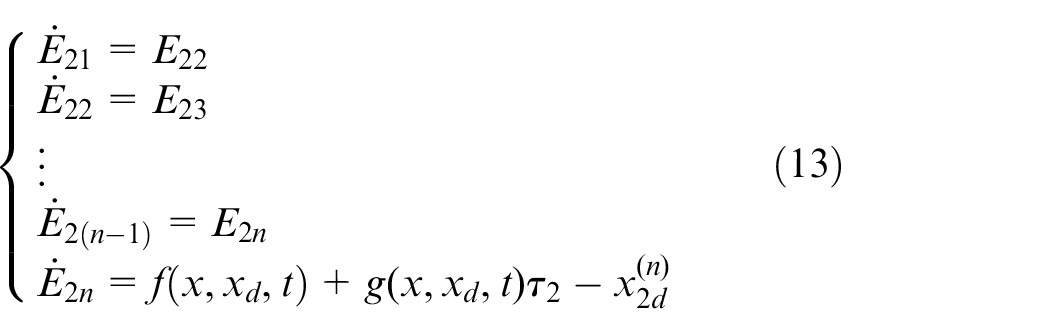
By calculating the n-order derivative of , system (10) can be transformed to equation (13)
where
and
is unmeasured.
Next, we will give the primary design conclusion using the two-step switching control method.
Step 1. We design a control law to achieve converge to zero in fixed time , According to Lemma 2, subsystem (11) will converge to zero within bounded time that is not dependent on initial state when we construct controller as follows
where the positive constants , , , and positive odd integers , , , , , , , satisfy , , , and , , , , is a threshold parameter, and
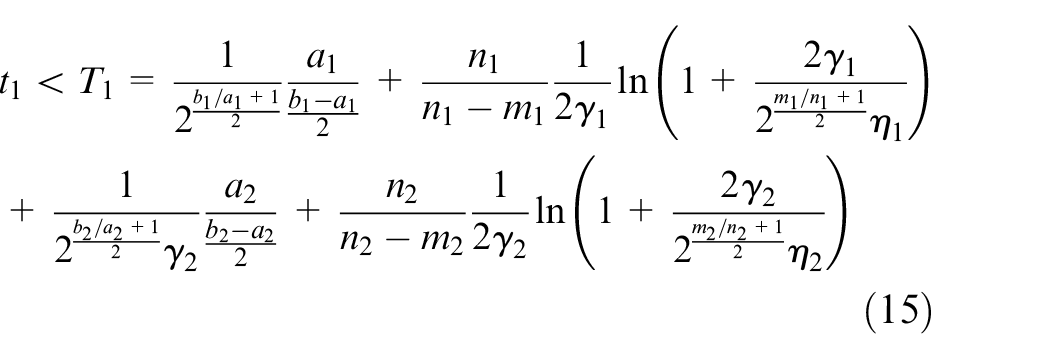
The state vector of subsystem (11) converges to zero in a bounded time; the boundary of convergence time can be expressed as follows
Therefore, as , and then go to Step 2.
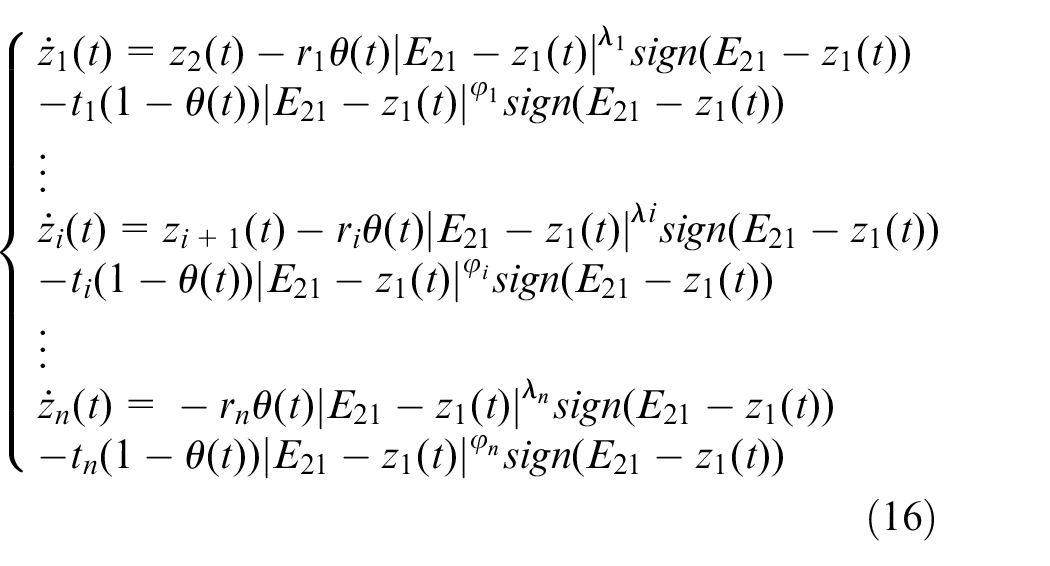
Step 2. In this step, we are going to give a proof of the state vector of subsystem (13) can be stabilized to zero in a fixed time. Due to is the unmeasured system state, only can be measured. The state observer is constructed as
The observer variables are estimated for . , , , and are system parameters, which can be chosen to meet the following three conditions:
The exponents are selected to satisfy , , where and , where , are sufficient small positive real numbers.
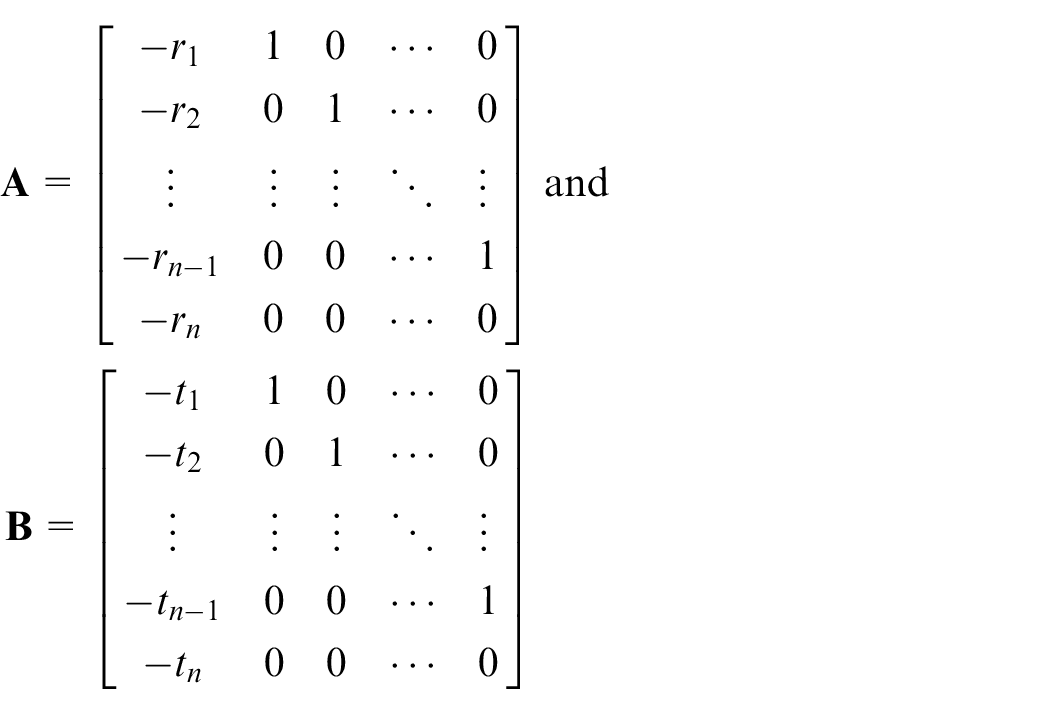
The coefficients and are assigned such that Hurwitz matrixes and are as follows
3. The function is defined as
where is the switch time.
Based on the designed observer above, the theorem is given as follows
Theorem 1
To use the state observer (equation (16)), can be estimated accurately within finite time ; the upper bound exists such that , and is independent of the initial state.
Proof
The observer variable is estimated for , hence we can define estimation error as , and the estimation error system can be expressed as
when , which means , system (17) can be rewritten as
Consider a Lyapunov function , where , , and is a positive symmetric matrix satisfying , where is positive matrix. If , system (18) will change into . According to the above statement, matrix is Hurwitz; consequently, is asymptotically stable. The derivative of is as follows
if and only if . When , we can obtain that , which implies that there is a sufficient small constant , for all ; also means that .
Based on the definition,44 we can prove that the Lyapunov function is homogeneous of degree and its derivative is homogeneous of degree with respect to the same weights . According to Lemma 4, we can establish the following inequality
Due to , and there is a small positive constant such that for all , the inequality holds. Therefore, we can obtain
2. As , which means , and system (17) becomes
We can choose a Lyapunov function , where , , positive symmetric matrix satisfying , where is positive matrix. Analogously, it is not difficult to prove that system (21) converges for a finite time. The derivative of Lyapunov function with respect to time satisfies the following inequality
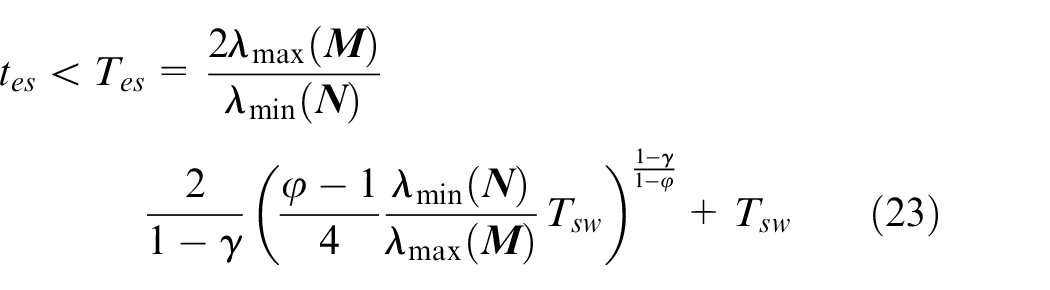
Since , the Lyapunov function (equation (22)) will converge to zero within finite time. System (21) can converge to zero within finite time, and the upper bound of time is
According to equation (23), we can conclude that the upper bound of the estimated time depends only on the design parameters , , , , . This implies that the estimated time has nothing to do with the initial estimation error. Moreover, it can be obtained in advance.
The proof is completed.
Next, design a fixed-time convergent control law of the second subsystem as
The exponents satisfy conditions: , and where , is a small positive constant. , , , , where , is a small positive constant. The coefficients are assigned such that matrixes and are Hurwitz
Based on the designed controller above, the convergence time of system (13) is described in the following theorem.
Theorem 2
The state of the second subsystem converges to zero within a fixed time
where , are symmetric positive definite matrixes and satisfy the following equations
, are positive definite matrixes.
Proof
Starting from , , consequently, after , the controller (equation (24)) is activated. Hence, we can use replace unmeasured state . Based on Theorem 1 in the work by Basin et al.,45 the proposed fixed-time control law (equation (24)) can drive all states to zero within a fixed time. For any initial state of system (13), the total convergence time is less than . The proof of this theorem is completed.
Simulation results
In this section, we will verify the validity of our proposed tracking controller with MATLAB simulations. In the following simulation, the system is divided into two subsystems (11) and (13). We will simulate the two subsystems, respectively. For the first subsystem, we assume that , and we select the parameters of as , and . Before simulating the second subsystem, we should first verify the validity of the state observer. For the estimation error system (17), here we consider the fourth-order situation
We select the switch time as 2, the exponents of observer are selected as , , , and , , , . The coefficients are chosen as , , , . And then, for the second subsystem, we are going to give simulation for the following third-order tracking error system
Choosing the parameters , , , , , . The coefficients of are assigned as , , , .
Based on the above parameters, we will simulate the convergence process of the two subsystems and the state observer, and draw the following figures.
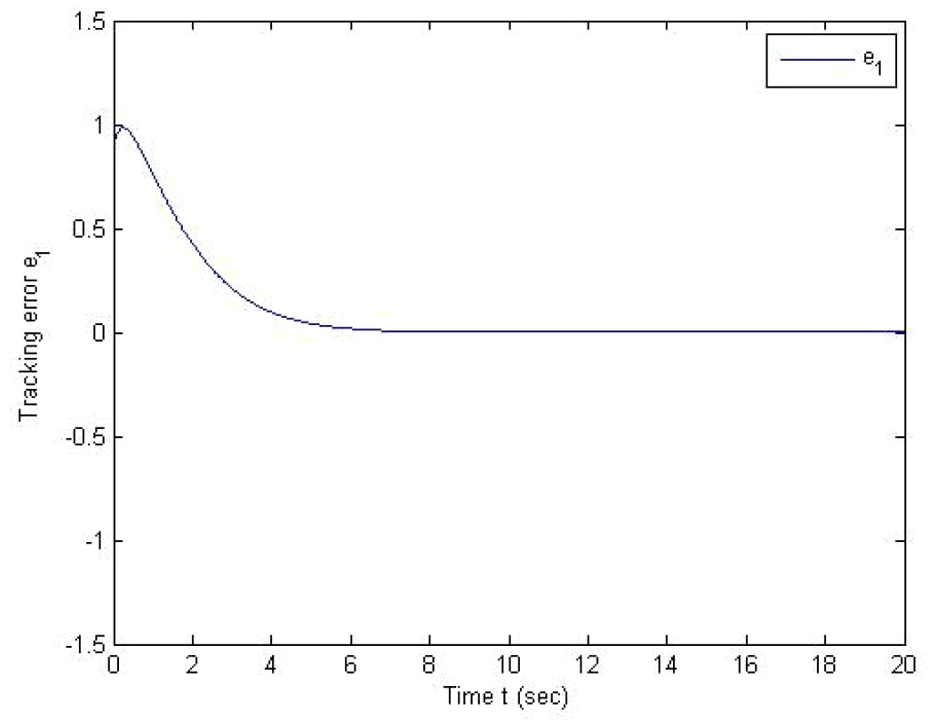
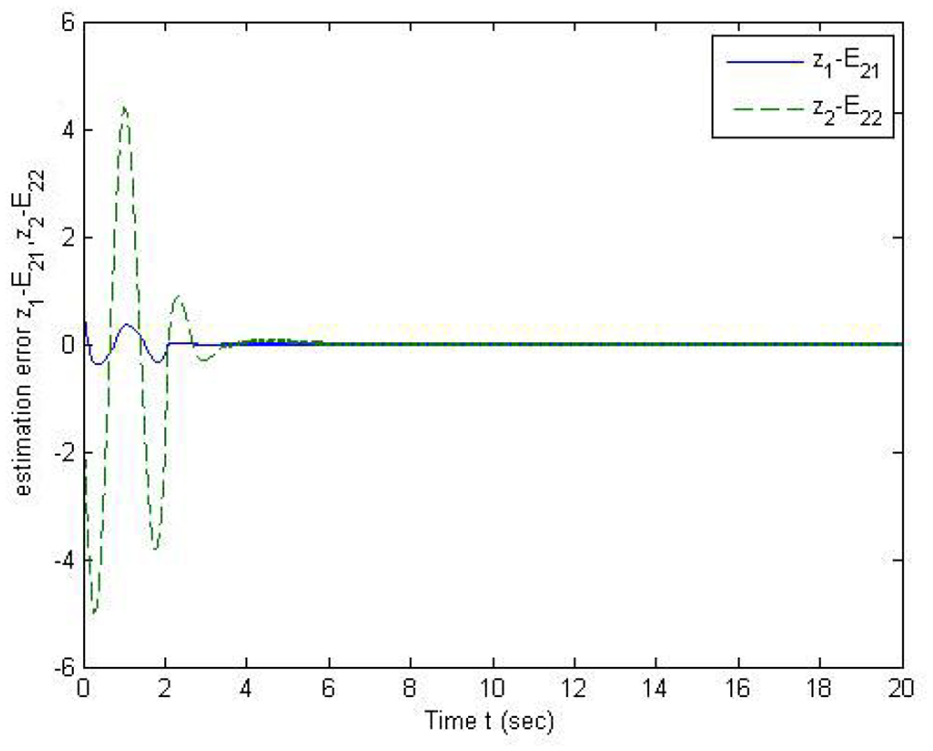
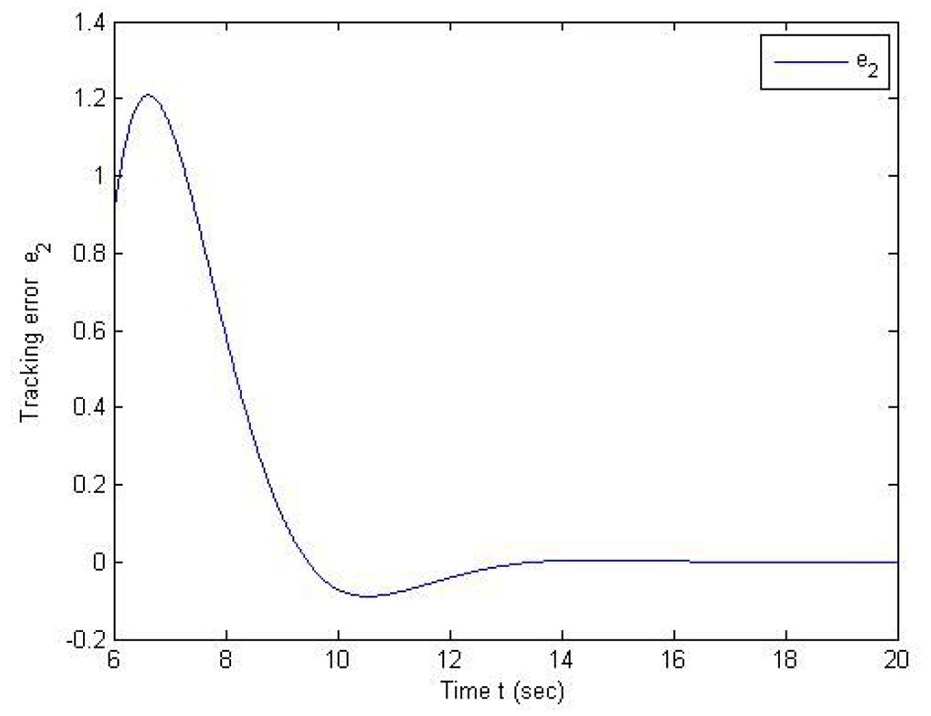
According to Figure 1, we can see the tracking error converges to zero in a finite time , For the designed state observer of the second subsystem, it can be seen from Figure 2 that the estimated error is stable to zero after 6 s. Defining as an identity matrix, and using equation (23), we can calculate the upper bound of estimation time . After , the controller (equation (24)) is activated; from Figure 3, we can see the total convergence time , approximately, does not exceed the bound time .
Tracking error in the first subsystem with respect to the time.
Estimation error in the state observer with respect to the time.
Tracking error in the second subsystem with respect to the time.
Conclusion
The fixed-time tracking control problem of extended nonholonomic n-order chained-form systems with incomplete information is considered in this article. Based on the special structure of chain-form system, the system is divided into two subsystems to design the controller based on fixed-time stability control theory and state observer methodology. Compared with the traditional control methods, fixed-time control has its own unique advantages: The convergence time can be calculated in advance and does not depend on the initial state. This has brought great convenience to the practical engineering application.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61304004).
ORCID iD
Hua Chen
References
1.
AilonAZoharI. Control strategies for driving a group of nonholonomic kinematic mobile robots in formation along a time-parameterized path. IEEE/ASME Trans Mechatron2012; 17(2): 326–336.
2.
BlochADrakunovS. Stabilization of a nonholonomic system via sliding modes. In: Proceedings of 33rd IEEE conference on decision and control, Lake Buena Vista, FL, 14–16 December 1994, vol. 3, pp. 2961–2963. New York: IEEE.
3.
DesaiJPOstrowskiJPKumarV. Modeling and control of formations of nonholonomic mobile robots. IEEE Trans Robot Automat2002; 17(6): 905–908.
4.
JiangZPNijmeijerH. A recursive technique for tracking control of nonholonomic systems in chained form. IEEE Trans Automat Contr1999; 44(2): 265–279.
5.
WalshGTilburyDSastryS, et al. Stabilization of trajectories for systems with nonholonomic constraints. IEEE Trans Automat Contr1994; 39(1): 216–222.
6.
AbikoSHirzingerG. An adaptive control for a free-floating space robot by using inverted chain approach. In: International conference on intelligent robots and systems, San Diego, CA, 29 October–2 November 2007, pp. 2236–2241. New York: IEEE.
7.
ChenH. Robust stabilization for a class of dynamic feedback uncertain nonholonomic mobile robots with input saturation. Int J Contr Automat Syst2014; 12(6): 1216–1224.
8.
ChenHDingSChenX, et al. Global finite-time stabilization for nonholonomic mobile robots based on visual servoing. Int J Adv Robot Syst2014; 11(11): 180.
9.
SarfrazMRehmanFUShahI. Robust stabilizing control of nonholonomic systems with uncertainties via adaptive integral sliding mode: an underwater vehicle example. Int J Adv Robot Syst2017; 14(5): 1–11.
10.
SunNYangTFangY, et al. Nonlinear motion control of underactuated three-dimensional boom cranes with hardware experiments. IEEE Trans Indus Inform2017; 14(3): 887–897.
11.
SunNWuYChenH, et al. An energy-optimal solution for transportation control of cranes with double pendulum dynamics: design and experiments. Mech Syst Sig Process2018; 102: 87–101.
12.
SunNWuYChenH, et al. Antiswing cargo transportation of underactuated tower crane systems by a nonlinear controller embedded with an integral term. IEEE Trans Automat Sci Eng2019; 16: 1387–1398.
13.
QianYZFangYCYangT. An energy-based nonlinear coupling control for offshore ship-mounted cranes. Int J Automat Comput2018; 15(5): 570–581.
14.
ZhangM. Finite-time model-free trajectory tracking control for overhead cranes subject to model uncertainties, parameter variations and external disturbances. Trans Inst Measure Contr2019; 41: 3516–3525.
15.
BrockettRW. Asymptotic stability and feedback stabilization. Different Geometr Contr Theory1983; 27(1): 181–191.
16.
PometJB. Explicit design of time-varying stabilizing control laws for a class of controllable systems without drift. Syst Contr Lett1992; 18(2): 147–158.
17.
SamsonCAit-AbderrahimK. Feedback control of a nonholonomic wheeled cart in Cartesian space. In: International conference on robotics and automation, Sacramento, CA, 9–11 April 1991, pp. 1136–1141. New York: IEEE.
18.
WalshGCBushnellLG. Stabilization of multiple input chained form control systems. In: Proceedings of 32nd IEEE conference on decision and control, San Antonio, TX, 15–17 December 1993, pp. 959–964. New York: IEEE.
19.
OrlovYDochainD. Discontinuous feedback stabilization of minimum-phase semilinear infinite-dimensional systems with application to chemical tubular reactor. IEEE Trans Automat Contr2002; 47(8): 1293–1304.
20.
Sira-RamirezHLischinsky-ArenasP. Dynamical discontinuous feedback control of nonlinear systems. IEEE Trans Automat Contr1990; 35(12): 1373–1378.
21.
LiberzonD. Hybrid feedback stabilization of systems with quantized signals. Automatica2003; 39(9): 1543–1554.
22.
KolmanovskyIMcclamrochNH. Hybrid feedback laws for a class of cascade nonlinear control systems. IEEE Trans Automat Contr1996; 41(9): 1271–1282.
23.
FloquetTBarbotJPPerruquettiW. Higher-order sliding mode stabilization for a class of nonholonomic perturbed systems. Automatica2003; 39(6): 1077–1083.
24.
HuYGeSSSuCY. Stabilization of uncertain nonholonomic systems via time-varying sliding mode control. IEEE Trans Automat Contr2004; 49(5): 757–763.
25.
JiangZP. Robust exponential regulation of nonholonomic systems with uncertainties. Automatica2000; 36(2): 189–209.
26.
LaiouMCAstolfiA. Discontinuous control of high-order generalized chained systems. Syst Contr Lett1999; 37(5): 309–322.
27.
ChenTShanJ. Fixed-time consensus control of multi-agent systems using input shaping. IEEE Trans Indus Electron2018; 66(9): 7433–7441.
28.
ZuoZHanQLNingB, et al. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Trans Indus Inform2018; 14(6): 2322–2334.
29.
ZuoZHanQLNingB. An explicit estimate for the upper bound of the settling time in fixed-time leader-following consensus of high-order multi-variable multi-agent systems. IEEE Trans Indus Electron2019; 66: 6250–6259.
30.
BhatSPBernsteinDS. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans Automat Contr2002; 43(5): 678–682.
31.
GaoFYeYWuY. Finite-time stabilization for a class of nonholonomic feedforward systems subject to inputs saturation. ISA Trans2016; 64: 193–201.
32.
HongYWangJXiZ. Stabilization of uncertain chained form systems within finite settling time. IEEE Trans Automat Contr2005; 50(9): 1379–1384.
33.
HuangXLinWYangB. Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica2005; 41(5): 881–888.
34.
PolyakovA. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Automat Contr2012; 57(8): 2106–2110.
35.
KanayamaYKimuraYMiyazakiF, et al. A stable tracking control method for an autonomous mobile robot. In: International conference on robotics and automation, Cincinnati, OH, 13–18 May 1990, pp. 384–389. New York: IEEE.
36.
QiuYLiBShiW, et al. Visual servo tracking of wheeled mobile robots with unknown extrinsic parameters. IEEE Trans Indus Electron2019; 66: 8600–8609.
37.
YanZLaiXMengQ, et al. A novel robust control method for motion control of uncertain single-link flexible-joint manipulator. IEEE Trans Syst Man Cybernet. Epub ahead of print 8 March 2019. DOI: 10.1109/TSMC.2019.2900502.
38.
SamsonC. Velocity and torque feedback control of a nonholonomic cart. Adv Robot Contr1991; 162(1): 125–151.
39.
YeJ. Tracking control for nonholonomic mobile robots: integrating the analog neural network into the backstepping technique. Neurocomputing2008; 71(16–18): 3373–3378.
40.
ChenHWangCZhangB, et al. Saturated tracking control for nonholonomic mobile robots with dynamic feedback. Trans Inst Measure Contr2013; 35(2): 105–116.
41.
ChenHZhangBZhaoT, et al. Finite-time tracking control for extended nonholonomic chained-form systems with parametric uncertainty and external disturbance. J Vib Contr2016; 24(1): 100–109.
42.
YangXHuangY. Capabilities of extended state observer for estimating uncertainties. In: American control conference (ACC’09), St. Louis, MO, 10–12 June 2009, pp. 3700–3705. New York: IEEE.
43.
NiJLiuLLiuC, et al. Fast fixed-time nonsingular terminal sliding mode control and its application to chaos suppression in power system. IEEE T Circuits II2017; 64(2): 151–155.
44.
BhatSPBernsteinDS. Geometric homogeneity with applications to finite-time stability. Math Contr Sig Syst2005; 17(2): 101–127.
45.
BasinMRodriguez-RamirezPGuerra-AvellanedaF. Continuous fixed-time controller design for mechatronic systems with incomplete measurement. IEEE/ASME Trans Mechatron2017; 23: 57–67.