
Abstract
Considering the problems of the internal and external disturbances of wind speed in the direct-drive wind energy conversion system based on a permanent magnet synchronous generator, a novel model predictive control based on the extended state observer method without the accurate mathematical system model is proposed in this paper. First, a model predictive control method is employed as the feedback controller, while the mathematical model of the control system can be adjusted online via the rolling optimization strategy. Second, an extended state observer is introduced to estimate the state variables and lumped disturbances, that is, the internal disturbances including nonlinear characteristic, multi-variety coupling effect, uncertainties of system parameters, and external disturbances including variations of wind speeds and uncertainties of the natural environment. Third, the effect of lumped disturbances can be attenuated by the estimated disturbance value via a feedforward channel. In addition, in order to achieve the real-time speed control performance of the permanent magnet synchronous generator, a speed sensorless algorithm based on a flux observer is proposed to solve the problem of unsuitability of mechanical speed sensor. Finally, the simulation results with several wind speed types show that the proposed sensorless model predictive control with the extended state observer strategy is an effective way to improve the performance of anti-disturbance and ability of tracking maximum wind energy of the wind power control system.
Keywords
Introduction
As a renewable, pollution-free natural resource, the wind energy has shown significant prospects of social development. To a certain extent, it can replace the increasingly scarce fossil fuels and solve the problems of energy shortage and environmental pollution in today’s world. With the development of social economy and civilization, people put forward significant requirements for wind power generation systems. Permanent magnet synchronous generator (PMSG) is a gearless wind energy conversion system (WECS) with the advantages of direct energy transmission and low noise level. Moreover, this kind of generator also has reliable operation and low rotor loss, since PMSG can work at low speed without brush. Therefore, it is of practical significance to perform research on PMSG-based WECSs. Due to the multivariable coupling and nonlinear features of a PMSG-based WECS, it is difficult for the wind power system to obtain excellent dynamic performance while the WECS is subjected to lumped disturbances, that is, internal disturbances and external disturbances including uncertainties of system parameters, modeling error, uncertainties of wind speeds, and natural environmental factors.
Moreover, the generator usually is operated in the variable-speed mode below rated wind speed, since the significant control purpose of the WECS with PMSG is power efficiency maximization in the low-speed region. The optimum tip speed ratio method is a great way to achieve maximum power tracking performance. Due to the above reasons, many researchers have developed a large number of control strategies based on optimum tip speed ratio methods for obtaining maximum power tracking performance of PMSG-based WECSs in recent decades. A novel proportional–integral–derivative (PID) controller for a direct-drive wind turbine generator is proposed to track maximum power in Hong et al. 1 An adaptive duty cycle method with gradient approximation is introduced to enhance the power capture performance. Pole placement based on a linearized system model in the state space domain is proposed to maximize the aerodynamic efficiency of a horizontal axis wind turbine with a PMSG. 2 The simulation results show that the proposed method can obtain good performance with a nonlinear model subjected to random wind speeds. A composite maximum power point tracking (MPPT) controller for the small signal model of a grid-connected PMSG-based wind turbine system is proposed to enhance the smoothness and rapidity of capturing power in Nasiri et al., 3 including the tip speed ratio method and optimal torque control. These tip speed ratio methods based on traditional feedback controllers can capture the maximum wind power with its dependence on the accurate mathematical model of the wind turbine system. The industrial applications of these methods are limited, since it is difficult to establish the accurate dynamic model of the actual system.
Compared with the traditional feedback control methods, since the model predictive control (MPC) method is independent of the mathematical model of the generator and also due to its advantages of rolling optimization and online feedback, it has been widely used in industrial cranes, series elastic actuators, wind turbines, and other industries in recent years.4–8 However, the internal and external disturbances of the industrial systems called lumped disturbances, such as modeling error, parameter variation, and external uncertainties, can not only cause inaccurate feedback correction to the predictive model of the MPC, but also degrade the stability and control performance of the industrial systems. Some popular disturbance observer methods are introduced to attenuate the above total disturbances, such as linear disturbance observer, 9 equivalent-input-disturbance approach, 10 neural network observer, 11 , 12 and Luenberger observer. 13 An extended state observer (ESO) with a high order than the system is another observer method employed to obtain excellent dynamic performance. This kind of disturbance and state variable estimation method is first put forward and completely expressed by Han. 14 A linear structure ESO–based control scheme is proposed by Gao 15 with the advantages of anti-disturbance performance. Due to the features of the concise framework, convenient form for parameter tuning, analysis, and implementation, these kinds of linear ESO–based control methods have been broadly applied in dealing with dynamic uncertainties, disturbances, and nonlinear factors of the industrial systems.16–20
In order to realize real-time speed control of a PMSG, it is necessary to measure the speed of the generator as the feedback signal. Compared with the current or voltage sensor, the cost of speed sensor detection accuracy is much more expensive. Even worse, the mechanical speed sensor may not be suitable for a harsh wind power operating environment, since research pays more and more attention to the study of speed sensorless algorithms. There are three kinds of speed sensorless algorithms, that is, open-loop algorithm based on the motor mathematical model, 21 closed-loop algorithm based on various observer models, 22 and an algorithm based on nonideal characteristics. 23 These kinds of speed sensorless technologies have been introduced into the PMSG-based wind turbine systems because of their practical advantages. A wind turbine control and an analogue speed estimator based on a Kalman filter are introduced to estimate the shaft speed for capturing the maximum power of wind turbines in Antarctica. 24 In Abdelrahem et al., 25 a sensorless field-oriented control (FOC) scheme is proposed for a PMSG in a variable-speed wind turbine. The experimental results show that the power capture performance is excellent under many operating conditions and parameter variations of the PMSG. A novel sensorless method based on the output voltage and current of a rectifier is proposed to improve maximum power extraction of a small-scale WECS using a PMSG, without the wind speed information and turbine characteristics. 26 The simulation and experimental results show that the extraction performance and efficiency are higher than those of the conventional perturb and observe method.
Considering the limitations of MPC for PMSG-based WECSs, the effectiveness of MPC will be decreased when the WECSs are subjected to serious total disturbances, such as nonlinearity, strong coupling, multi-varieties, and uncertainties of natural wind, since a second-order ESO due to the advantage of its anti-disturbance ability is employed to enhance the extraction performance of the whole WECS. Moreover, the ability of the whole control system is improved by the feedforward compensation part. Nevertheless, the measurement of stator current and voltage is relatively easy, and the technology of avoiding magnetoelectric field disturbance is relatively perfect. Therefore, the speed sensorless algorithm based on the flux observer technology is proposed for the wind power control system.
The rest of this paper is organized as follows. Section “Modeling of the PMSG-based WECSs” gives description of the system dynamic model. A novel structure of the speed sensorless MPC method for a PMSG-based WECS is introduced in section “Composite MPC based on the speed sensorless method.” And the design process and stability analysis of the proposed speed observer strategy are also discussed in this section. In section “System simulation verification,” numerical simulation results based on several wind speed types show the effectiveness of the proposed control strategy. Finally, the conclusions end the paper.
Modeling of the PMSG-based WECSs
The wind turbine model
According to the principle of aerodynamics, the mechanical energy of the wind turbine can be converted from wind power through equation (1) 20

where the mechanical power
Thus, the driving torque of the blade with wind speed

The tip speed ratio of the system can be obtained by equation (3)

where
According to Li et al.,
20
the wind power coefficient
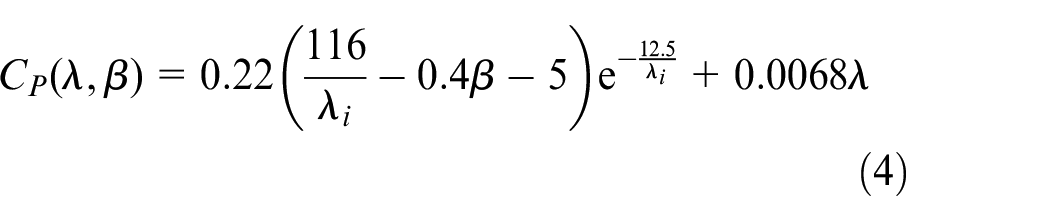
These parameters satisfy the equation as
It can be seen from the mechanical power equation (1) that the maximum power can be obtained when the parameter
The relationship between
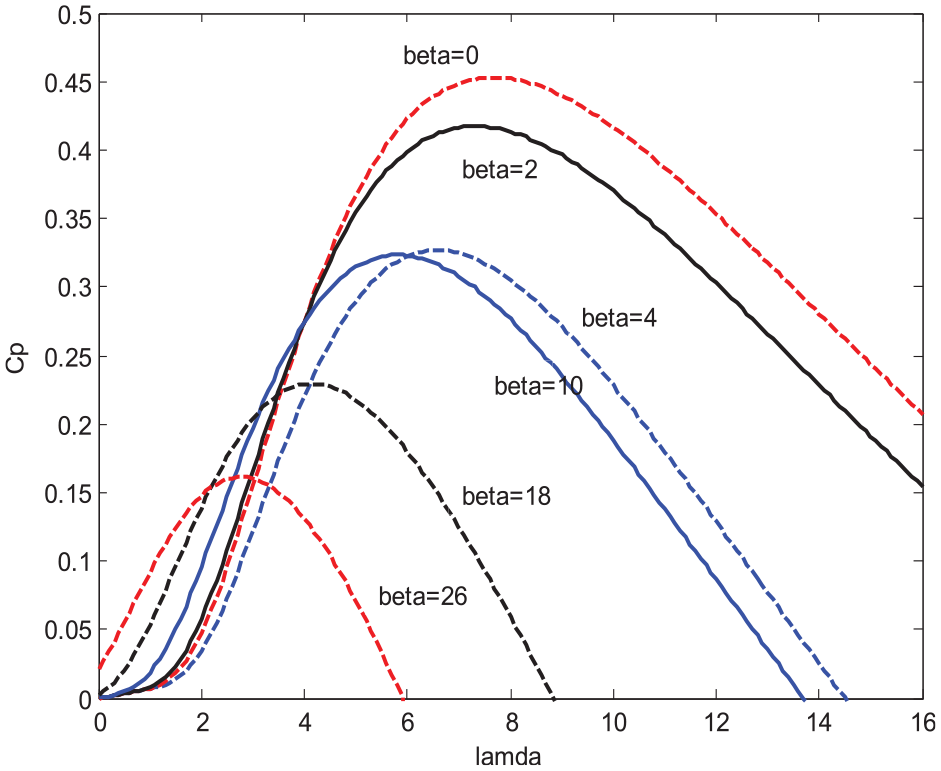
Relationship between
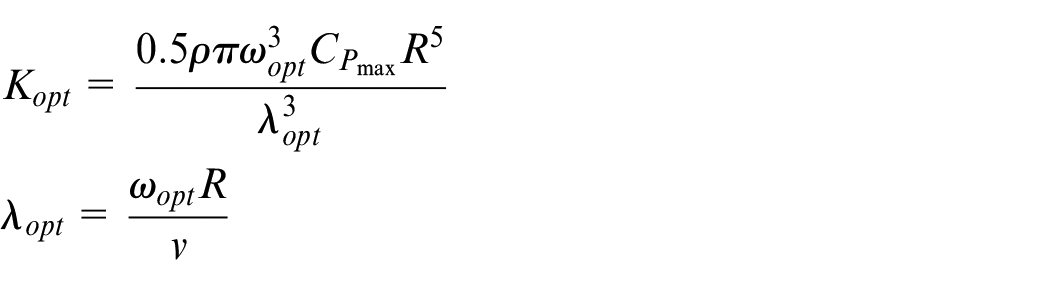
It is obvious from equation (3) that the optimal speed

Equation (5) indicates the nonlinear relationship between optimal power and angular velocity. The parameters
The mathematical model of the PMSG
The PMSG is the core device of the direct-drive PMSG, and the correct establishment of the mathematical model plays a significant role in the research process. In order to develop a simplified and practical generator model, the following assumptions are made before the modeling:
Three-phase electricity is symmetrical;
The cogging torque effect of the PMSG is not considered;
The saturation effect of the generator core can be neglected;
The magnetic path is assumed as linear, regardless of the effect of eddy current and hysteresis loss.
The mathematical model of the PMSG in the α–β coordinate system can be expressed as follows

where
The electromagnetic torque in the α–β coordinate system can be described as follows

Through the Park transformation, the mathematical model of the PMSG in the α–β coordinate system can be converted into a mathematical model in the d–q coordinate system as follows
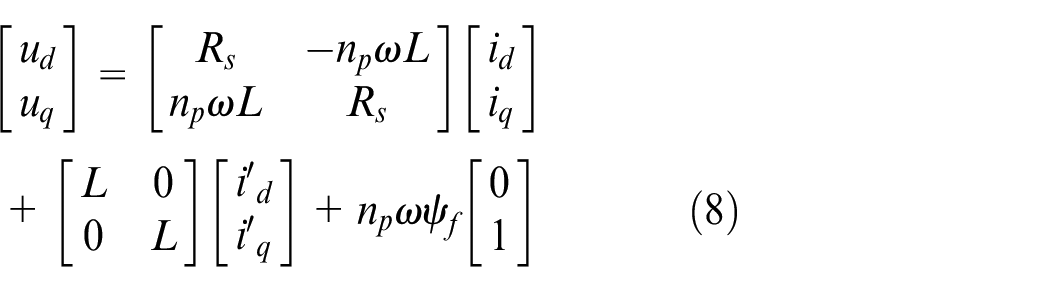
where

The dynamic equation of the whole wind turbine system can further be expressed as follows

where the parameters
Composite MPC based on the speed sensorless method
Design of a composite model predictive controller
Model predictive controller for a PMSG-based WECS
Let the load torque

where the auxiliary parameter
Considering that MPC is a kind of computer algorithm based on the model, it is necessary to use the zero-order holder to discretize the PMSG model and the Z transfer function can be obtained as follows

where the symbol
The present sampling step is defined as k, so

The prediction model for the speed of PMSG can be obtained by subtracting the two equations in equation (13), since it can be written as follows

where
The speed error

Based on the dynamic characteristics of the WECS, the reference trajectory generally takes the form of a first-order exponential change to prevent drastic changes in input and output parts. Hence, the expression can further be given as follows

where
It is well known that the optimal controller output is determined by the system performance index, so the quadratic performance index is employed in this paper considering the practicability and significance of this kind of index function. Frequently, the output error and the weight of the control amount are also used, so the predicted output
where
To minimize the optimization control function
Design of ESO
In the actual operating environment, there are internal and external disturbances in the wind power system, such as wind speed variation, uncertainties of the natural condition, and modeling error. The model predictive controller performs an online calibration system model based on the feedback information output by the PMSG. The total disturbances will cause unfavorable effects on the feedback part of the model predictive controller, which will inevitably lead to a decrease in the control accuracy of the MPC. Moreover, they can affect the control accuracy of the entire WECS. Hence, the ESO is introduced to estimate the internal and external disturbances of the system. These disturbances can further be compensated for and eliminated by the feedforward channel. And the first-order state space model can be expressed as follows

where
Defining

The ESO can be designed as follows

where
The characteristic equation of equation (22) can be given using equation (23) to satisfy the convergence and stability of the ESO

Selecting the ideal characteristic equation

where

Hence, the feedback control part can further be designed as follows

Design of the speed sensorless method
The d–q axis usually has the same speed as the generator rotor. In other words, the conversion from the α–β coordinate system to the d–q coordinate system requires rotor speed information to determine the position of the d and the q axis. Unfortunately, the Clarke transformation of the current in the A–B–C coordinate system requires only the rotor position signal. Therefore, the speed sensor proposed in this paper is based on the mathematical model of PMSG in the α–β coordinate system.
According to equations (1)–(6), the state space equation of PMSG can be written as follows

where
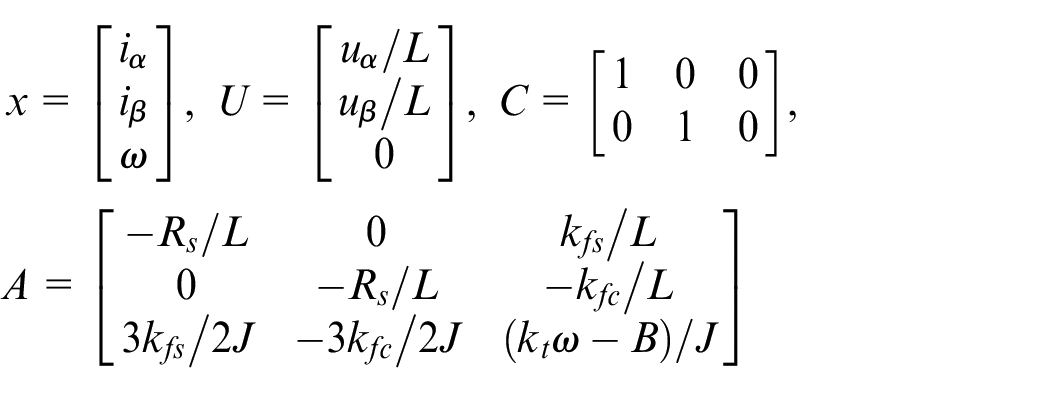
Define the matrix
where
Since

Substituting
where
In order to obtain the maximum power of current wind speed, the inner control loop is employed in the FOC method. In addition, it is well known that
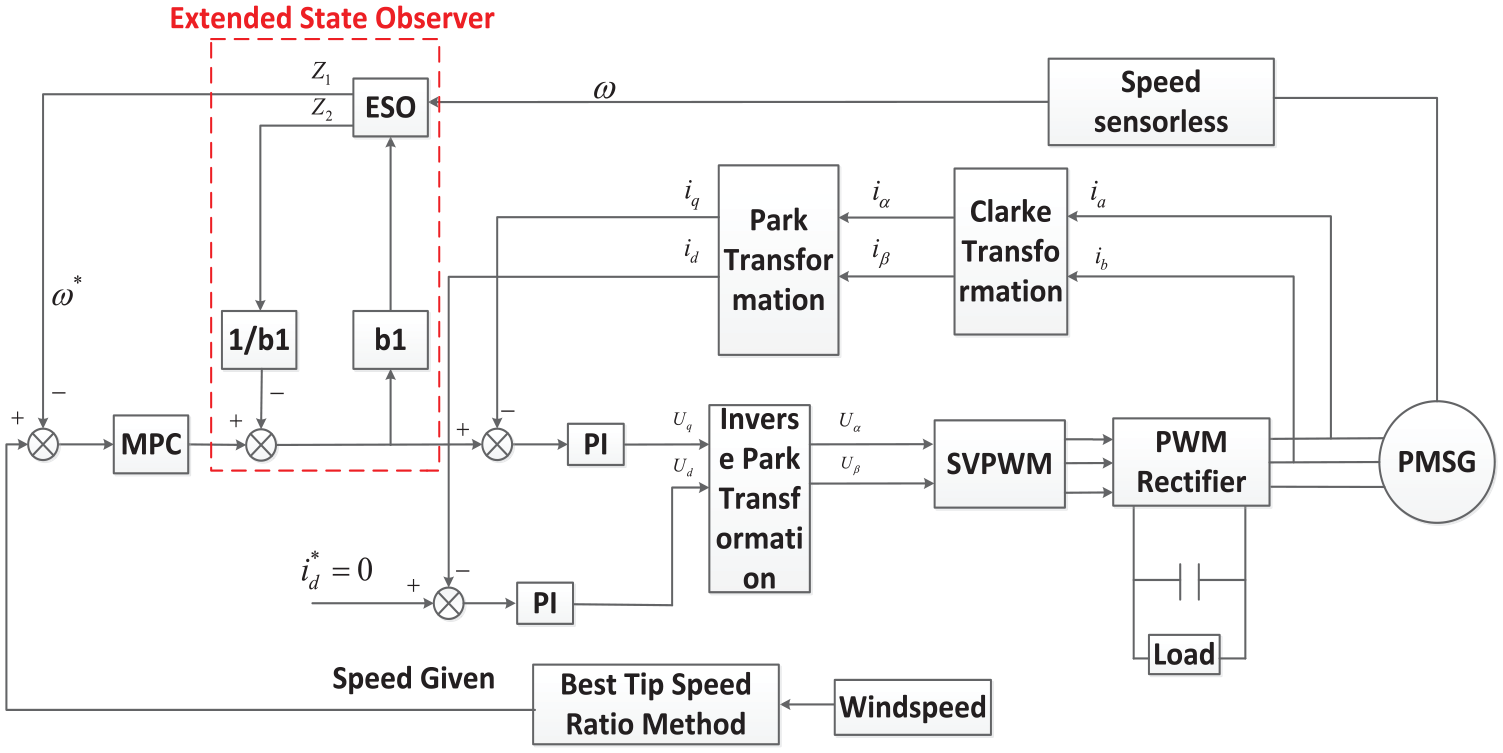
Wind turbine control structure block diagram based on the speed sensorless composite model predictive control method.
System simulation verification
The parameters of the PMSG used in the simulation are as follows: the rated speed is
The parameters of the wind turbine used in the simulation are as follows: the power coefficient is
Figures 3 and 4 show the comparison of the estimated speed of the speed observer with the actual speed of PMSG. It is not difficult to observe that the speed observer in this paper has an excellent speed tracking effect and will not have a great impact on the stability and convergence speed of the system. This strategy can reduce the cost of physical sensors in the actual operation of wind farms and also has no significant impact on the anti-disturbance ability for the WECSs. Therefore, it can replace the speed sensor to a certain extent, also reduce the cost of the system, and achieve high economic benefits on the premise of guaranteeing the control accuracy of the wind power system.
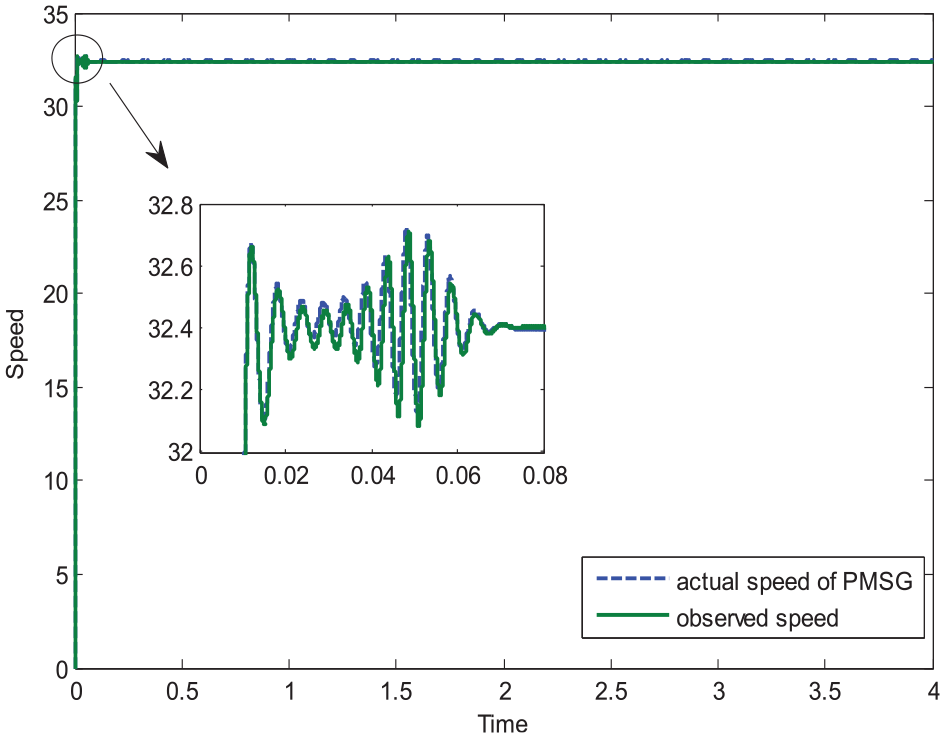
Velocity observation under basic wind.
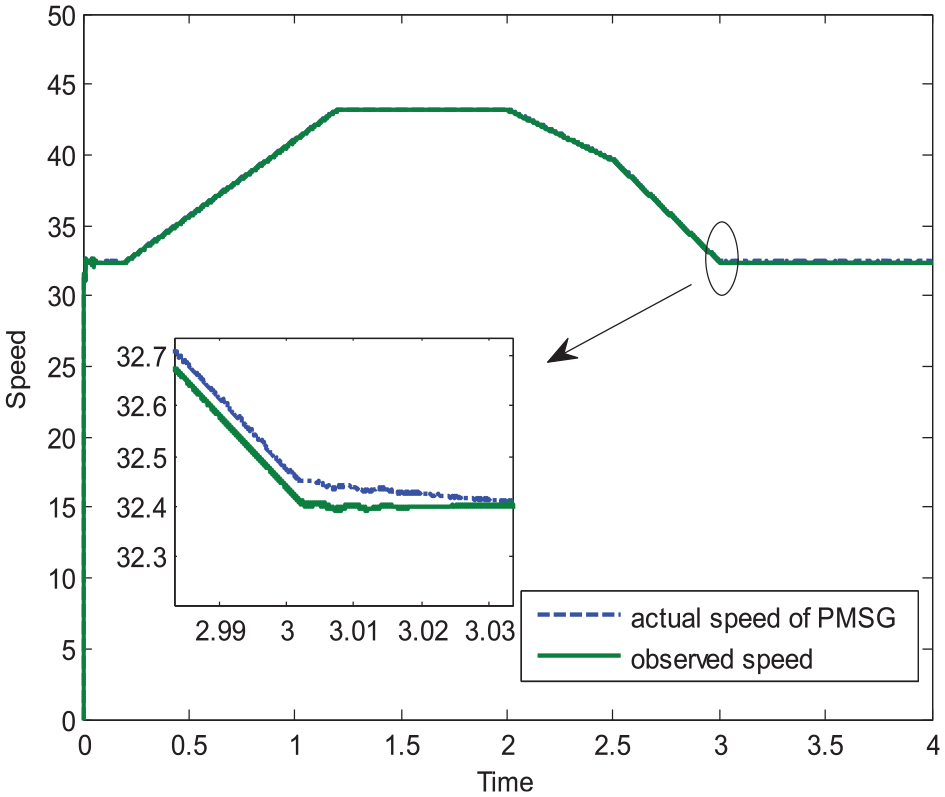
Velocity observation under gradient wind.
Figures 5–8 show the comparisons of the generator speed tracking under basic wind and random wind. In order to simulate the disturbance of the wind power system during the actual operation, when t = 1, a sudden change is applied to the driving torque of the system. The generator speed tracking result at this time is shown in Figure 6. Figure 7 shows the ESO’s observation of disturbances in this case. It can be seen that pure MPC and composite model predictive controller can achieve good tracking effect when the system runs smoothly. However, when the system is disturbed or the wind speed changes abruptly, the tracking performance of the composite model predictive controller is faster and more stable than the traditional MPC. The fluctuation amplitude is smaller, that is, the anti-disturbance effect is better than that with pure MPC. The ESO can observe the total disturbances in time and compensate for them through the feedforward channel when the system is subject to internal and external disturbances, so that the accuracy of the generator speed observation is higher.
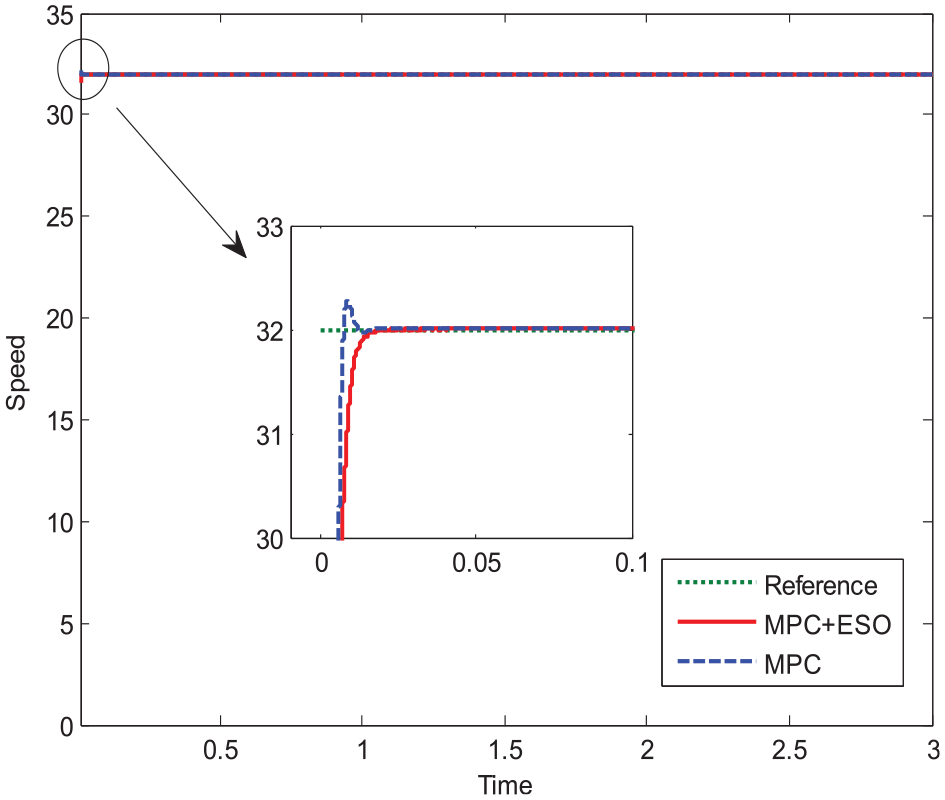
Comparison of generator speed tracking under basic wind.
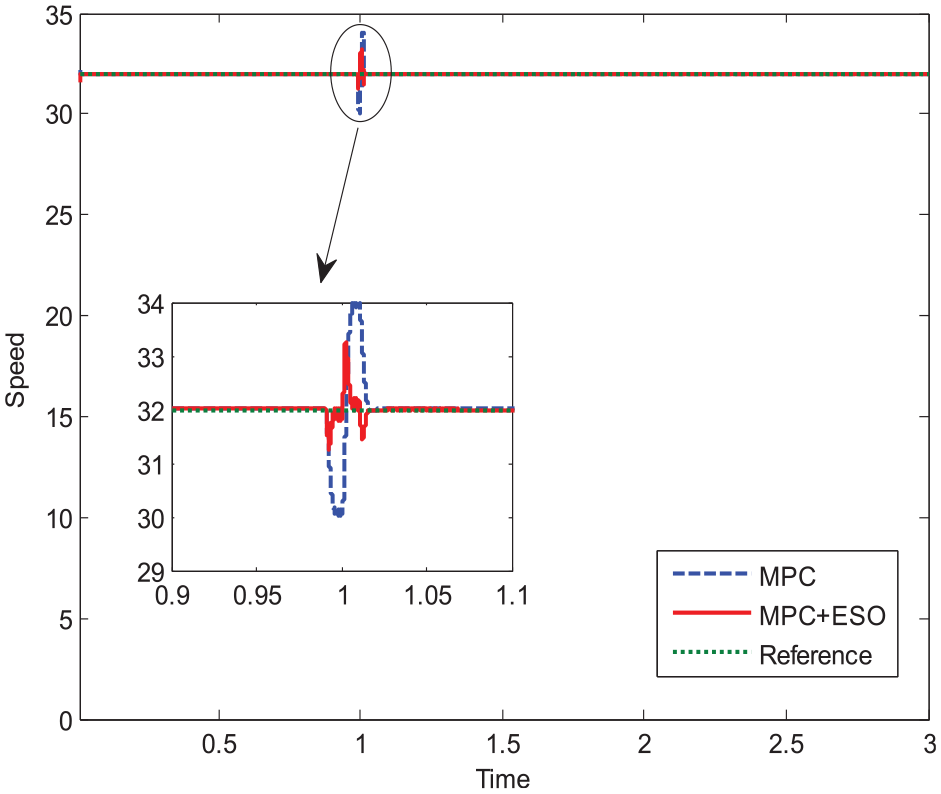
Comparison of generator speed tracking when disturbed under basic wind.
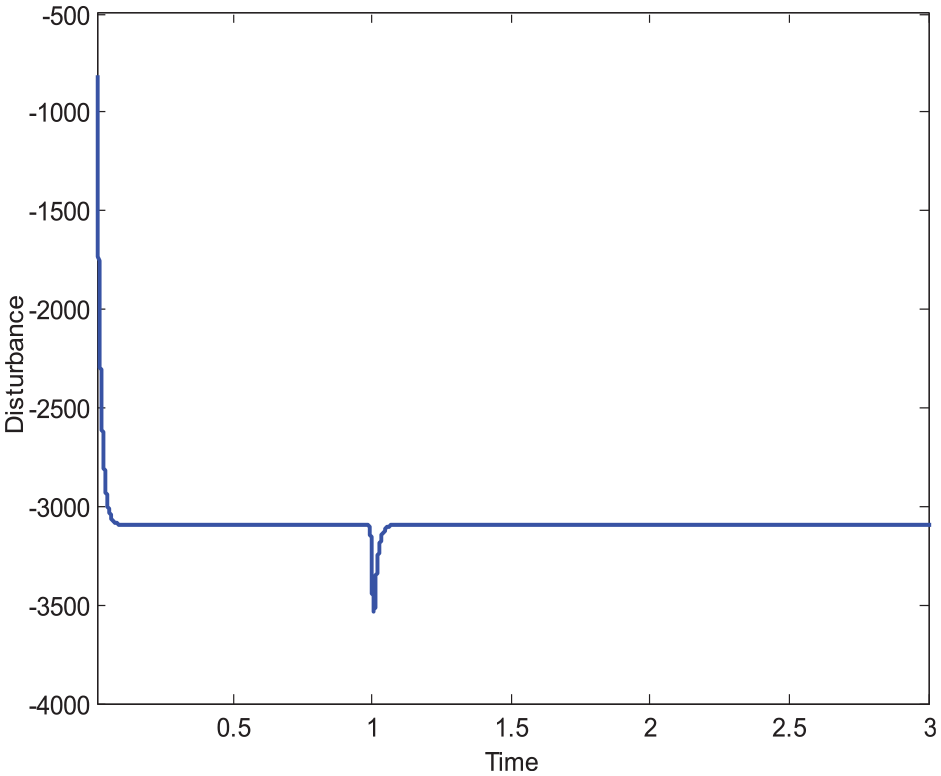
ESO observations when disturbed under basic wind.
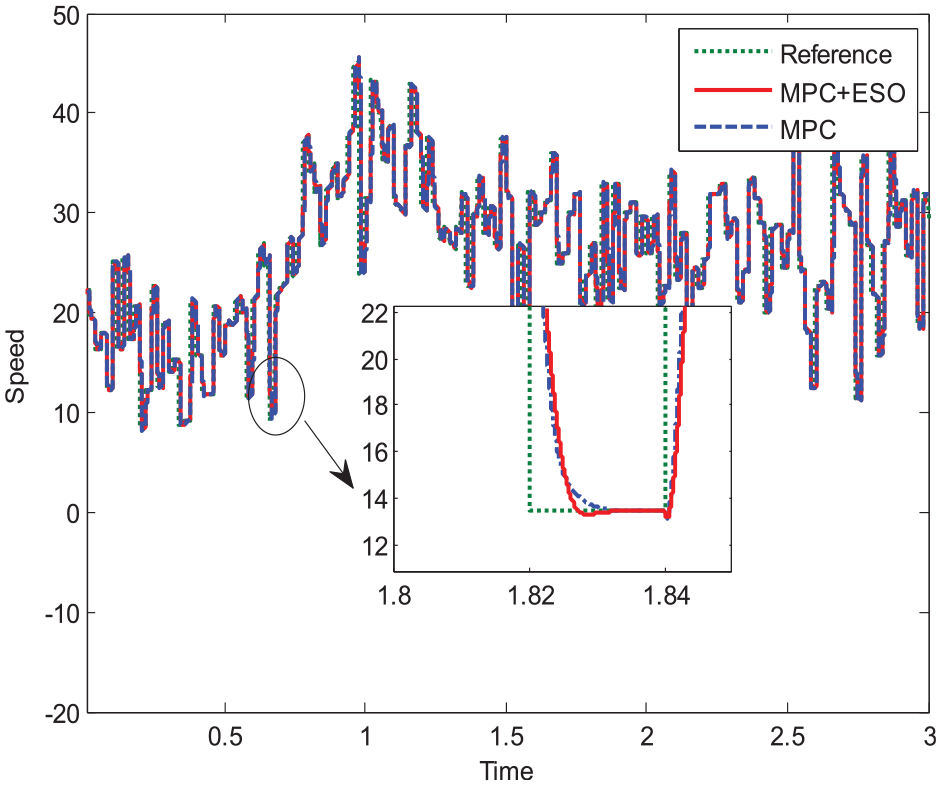
Comparison of generator speed tracking under random wind.
Conclusion
First, the wind speed, wind turbine, and PMSG are modeled separately in this paper to enhance the dynamic performance of the wind power system in the actual operation. Second, based on the in-depth study of model predictive controller and ESO, a composite MPC scheme is proposed to design the control system for capturing the maximum power. According to the different control requirements of speed loop and current loop, the model predictive controller is chosen as the main controller of the speed loop and the ESO is introduced into the feedforward channel to observe and compensate for the internal and external disturbances of the system. In addition, a speed sensorless control scheme based on the flux observer is proposed to estimate the speed of the generator. Hence, the whole composite MPC scheme is designed to track maximum power of a wind turbine without a mechanical sensor. Finally, the simulation results obtained using MATLAB show that the identification accuracy of generator speed with the proposed sensorless method is acceptable. Compared with the system using only the model predictive controller, the wind power system under the composite MPC strategy based on ESO has better tracking performance and anti-disturbance properties, which greatly improves the wind energy conversion capability and actual operating cost of the wind power system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported in part by the National Natural Science Foundation of China (Grant no. 61773335), Natural Science Foundation of Jiangsu Province (Grant nos. BK20171289 and BK20160476), Six Talent Peaks Foundation of Jiangsu Provincial (Grant no. KTHY2018038), the Natural Science Foundation of Yangzhou City for Outstanding Young Scholars (Grant no. YZ2017099), State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources (Grant no. LAPS19003).