
Abstract
Divergent instability control of 2D pretwisted blade section of wind turbine driven by aerodynamic forces under disturbance is investigated. Realization of divergent instability control is based on two types of discrete sliding mode control algorithms. The structure is modeled as 2D pretwisted blade section integrated with structural damping, which is driven by aerodynamic model with perturbed disturbance. Discrete sliding mode control algorithm suitable for disturbance control is investigated to control divergent flap/lead-lag vibrations of blade section. To increase convergence performance and reduce the chattering phenomenon, discrete sliding mode control based on disturbance observer is applied. Convergence of disturbance observer is analyzed, and stability of closed-loop system is discussed. The simulation results show that not only the convergence accuracy can be improved by sliding mode control based on disturbance observer controller, but also the displacement chattering and the control input chattering can be effectively eliminated. Compared with conventional discrete sliding mode control, it has more advantages in the control of divergent instability. To facilitate the real-time realization and automation and at the same time to ensure accuracy, a design of quadratic feedback to build the performance control matrix in sliding mode control based on disturbance observer is developed in present study.
Keywords
Introduction
Divergence instability control has been an important topic in the field of aeroelastic stability of wind turbine blades for a long time. The 2D typical cross-section analysis has been widely used in quick study of flap/lead-lag or flap/twist vibrations of wind turbine blades due to its simplicity and convenience.1–3 Structure modeling and stall-induced instability analysis of individual turbine blade section subjected to combined flap/lead-lag and flap/twist motions were investigated in earlier study, 1 with extended ONERA aerodynamic model and Navier–Stokes model applied to analyze aeroelastic stability. Some structural control methods, based on trailing-edge flaps or microtabs, were used for aeroelastic control of the cross-section.2,3 Numerical study on closed-loop control of transonic buffet suppression by trailing-edge flap was analyzed. 2 Numerical investigation of flap/twist vibration model of a smart turbine blade section with microtab was also investigated in Li et al. 3 Stall flutter control of blade section undergoing asymmetric limit oscillations was investigated by microtab control scheme. 3
In addition, some other intelligent algorithms have recently been used in stability control of wind turbine blade,4–7 but rarely in divergent instability control. Two types of model predictive control algorithms 4 were investigated to suppress the sectional vibrations of turbine blade. The structure was modeled as 2D pretwisted cross-section, which incorporates the structural damping under different pretwisted angles, with vibration control investigated. 4 A continuously linearized model predictive control approach was described and applied to control a three-bladed, horizontal axis, variable speed wind turbine, with a focus on the controller’s tuning trade-offs. 5 A model predictive individual pitch controller with the linear interpolation model was proposed to reduce the blades asymmetric loads of large wind turbines operated in the above-rated wind speed region. 6 Stability analysis of time response and vibration control were investigated based on model prediction control algorithm with offset control and given target value to deal with the unstable vibration of wind turbine blade. 7 The stability of integral SMC was analyzed using Lyapunov stability criterion to make reduction in cost of wind energy for wind turbine. 8
The stability of wind power system is mainly reflected in two aspects. One is the stability of the energy storage system, which directly affects the energy conversion efficiency, and the other is the structural stability. Structural failures observed in recent years of large wind turbine blades have been mostly attributed to severe divergent vibrations in flap/lead-lag directions driven by unsteady aerodynamic forces. Active disturbance control and sliding mode control (SMC) approaches were analyzed to deal with the stabilization of a Euler–Bernoulli beam system, 9 which presented a method to resist disturbance by using active intelligent control theory. Given the uncertainty of wind load, on the basis of the quasi-steady aerodynamic forces proposed in Liu and Chang, 7 the perturbed disturbance load is attached to the aerodynamic forces in order to study the divergent instability control more effectively in present study. Because SMC was one of the effective nonlinear robust approaches with respect to system dynamics and invariant to uncertainties, 8 and Lyapunov stability approach and intelligent observer 10 were always used in SMC to keep the nonlinear system under control, SMC method integrated with Lyapunov analysis is used to realize the control of divergence instability in blade sectional movements in present study.
In view of the large wind power system being mostly controlled by programmable logic controller (PLC), some intelligent control algorithms should be discretized to be implemented in PLC hardware. Therefore, exploring the discrete algorithm of SMC has practical significance in engineering. Chakrabarty and Bartoszewicz 11 presented a theoretical analysis to show that increased robustness can be achieved for discrete SMC systems by choosing the sliding mode variables or the outputs. To avoid the chattering problem in the reaching-law-based discrete SMC and the generation of overlarge control action in the equivalent-control-based discrete SMC, a new discrete SMC method based on non-smooth control was proposed in Haibo et al. 12 As for the control of external disturbances and uncertain systems, a discrete SMC was presented for the robust chaos suppression of the generalized continuous-time chaotic systems subjected to matched/mismatched disturbances in Jason et al. 13 A robust output feedback controller was proposed for a class of uncertain discrete time, multi-input/multi-output, linear systems. It was based on the combination of discrete SMC and Kalman estimator, ensuring the stability, robustness and an output tracking against the modeling uncertainties at large sampling periods. 14
In present study, a discrete SMC algorithm, more refined and suitable for disturbance control based on Liu, 15 is investigated to control divergent flap/lead-lag vibrations of blade section. To increase convergence performance and reduce the chattering phenomenon, its expansion algorithm of discrete SMC based on disturbance observer (SMC/DO) is further applied, which was originally derived from Eun et al. 16 Convergence of disturbance observer is analyzed, with stability of closed-loop system discussed. The numerical simulation results based on analysis of displacements and velocities, and analysis of control input and sliding mode function fully demonstrates the robustness and superiority of the SMC/DO algorithm in aeroelastic flutter suppression, sliding-mode-chattering suppression and instability control.
Theoretical model of pretwisted blade section
Figure 1 shows the coordinate system of pretwisted blade section. The movements of the independent airfoil section of wind turbine exhibit two directions of displacements. The first is the flap-wise vibration displacement perpendicular to the plane of rotation, denoted by z; and the second is the displacement of the lead-lag vibration located in the plane of rotation, denoted by y. The origin of the rotating axis system is located at the rigid root. The wind velocity is denoted by U = 10 m s-1. The length of the blade is L = 15 m, with the rotating speed being Ω = λU/L (λ = 2 is the tip speed ratio). The characteristic cross-sectional dimension, chord length, is c = 1.316 m at a distance r = 5 m from the hub.
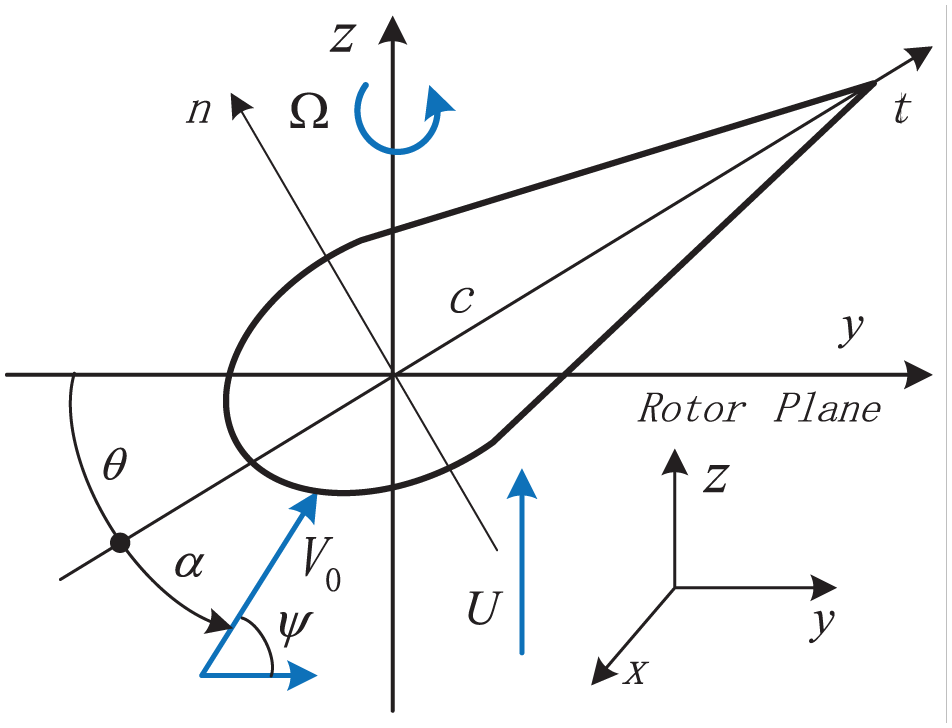
Coordinate system of pretwisted blade section.
Considering the aerodynamic model focused on perturbed disturbance load in present study, the sectional aeroelastic equations of motions integrated in structural equations7,17 and aerodynamic expressions are described as

where the related aerodynamic term

and the mass per length of blade section is denoted by ρ
b
= 7.598 kg m-1; the air density is ρ
a
kg·m-3; the natural angular frequencies of motions perpendicular to chordwise direction and parallel to chordwise direction are described by ω
n
= 4 rad s-1 and ω
t
= 8 rad s-1 respectively; the corresponding damping ratios are denoted by ξ
n
= 0.02 and ξ
t
= 0.04, respectively. The incoming angle is ψ = atan(U/Ω/r), with the relative wind speed being
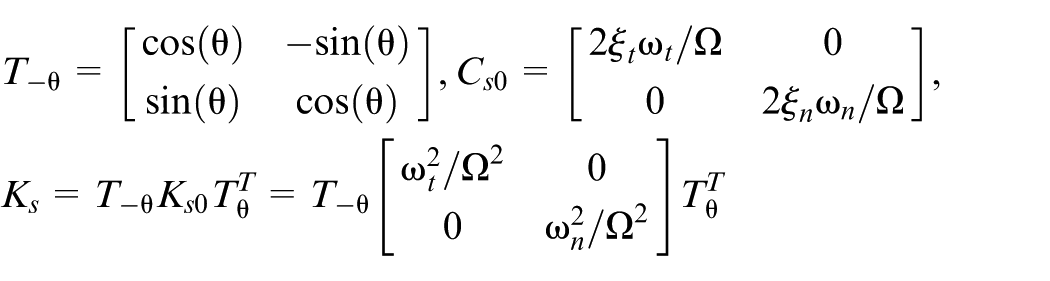
Consider the pretwisted angle of θ = (r/L) × (π/3), the structural damping coefficient matrix Cs and structural stiffness coefficient matrix Ksw in equation (1) can be written as 17

where the structural damping-based coefficient matrices can be defined as 17
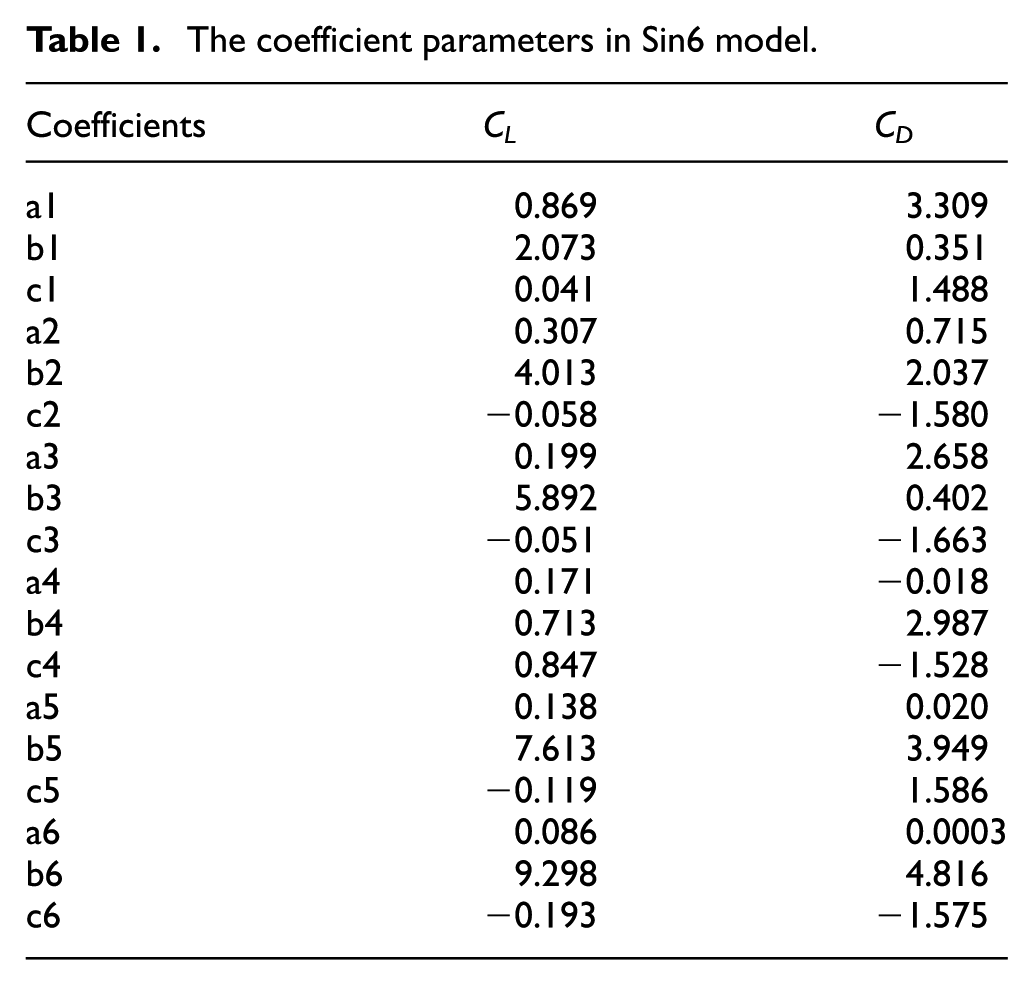
The lift coefficient CL and the drag efficient CD, each can be described as a function of attack angle α in a quasi-steady aerodynamic model.
7
The function is based on the fitting Sin6 model
The coefficient parameters in Sin6 model.
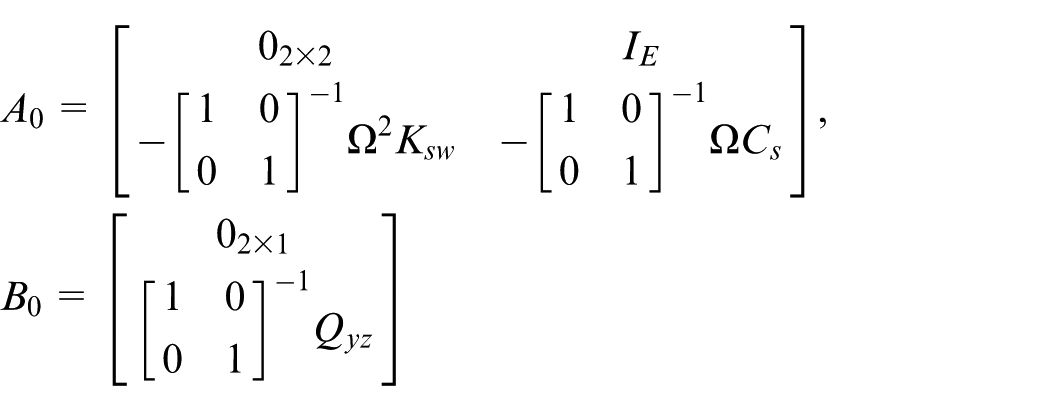
In order to carry on subsequent analysis, equation (1) needs to be transformed into the state space expression as follows

where x = [y z dy/dt dz/dt]T is the state variable vector. A0 and B0 are the corresponding coefficient matrices, which depend on mass coefficient, damping coefficient, stiffness coefficient and aerodynamic force in equation (1), and can be depicted as
A discrete-time model that approximates the continuous-time model equation (3) is produced assuming a zero-order hold on the inputs with sampling time Ts = 0.001s. Assume that the controlled input is u(k), and consider the uncertain system integrated in the perturbed disturbance load d(k), the corresponding discrete system of equation (3) can be expressed as

Design and analysis of discrete SMC controller
If the ideal position signal is xd(k), then the tracking error is e(k) = x(k) – xd(k). The sliding variable is designed as

where Ce is performance control matrix with cq > 0. It comes from empirical design.
The controller is designed as
where q and η are positive constant values, with
Stability analysis is given as follows 15
Since
The analysis in four different cases is as follows
When

then
2.when
then
3.when
then
4.when


then
From the above analysis, the following conclusions can be obtained
From equation (8), since
Discrete SMC/DO controller
The SMC/DO controller suitable for regulation and tracking, combing the control law and disturbance estimation law formulated in the discrete-time domain, was designed as 16

where
where the disturbance observer
where g is a positive constant value.
The closed-loop sliding mode dynamics
From equations (4) and (9), we obtain the following closed-loop sliding mode dynamics
where
From equations (11) and (12), the disturbance estimation error dynamics can be computed as
Convergence of disturbance observer and stability under SMC/DO controller
For the disturbance observer equation (11), the convergent condition of disturbance observer is depicted as follows: there exists a positive constant m, if
Convergence analysis of disturbance observer is as follows:
First,

Let

we obtain

According to equation (13), there exists

Second, an inductive method can be used:
When k = 0, there exists
suppose

is satisfied. From the above two equations, we have

Consider 0 < 1 – g < 1 and equation (17), we get

Therefore,
Therefore, from the above analysis, we can draw the following conclusions: there exists

For SMC/DO controller in equation (9), the stability conditions of the closed-loop system are depicted as follows: (1) 0 < q < 1, 0 < g < 1; (2) there exists a positive constant m, which satisfy
According to the similar derivation process shown in the “Design and analysis of discrete SMC controller” section, the following conclusions can be obtained
The disturbance d(t) is supposed to be continuous. If the sampling time is sufficiently small, then
Numerical simulation and discussion
The related parameter values of the divergent instability system, including structural parameters and external motion parameters, follow the values given in the section “Theoretical model of pretwisted blade section.” To realize simulation, the situational parameters and the controller parameters are displayed in Table 2. Let the desired position signal be xd(k) = 0 (a four element zero vector); the perturbed disturbance d(k) = dmsin(ωt).
Simulation parameters and controller parameters.
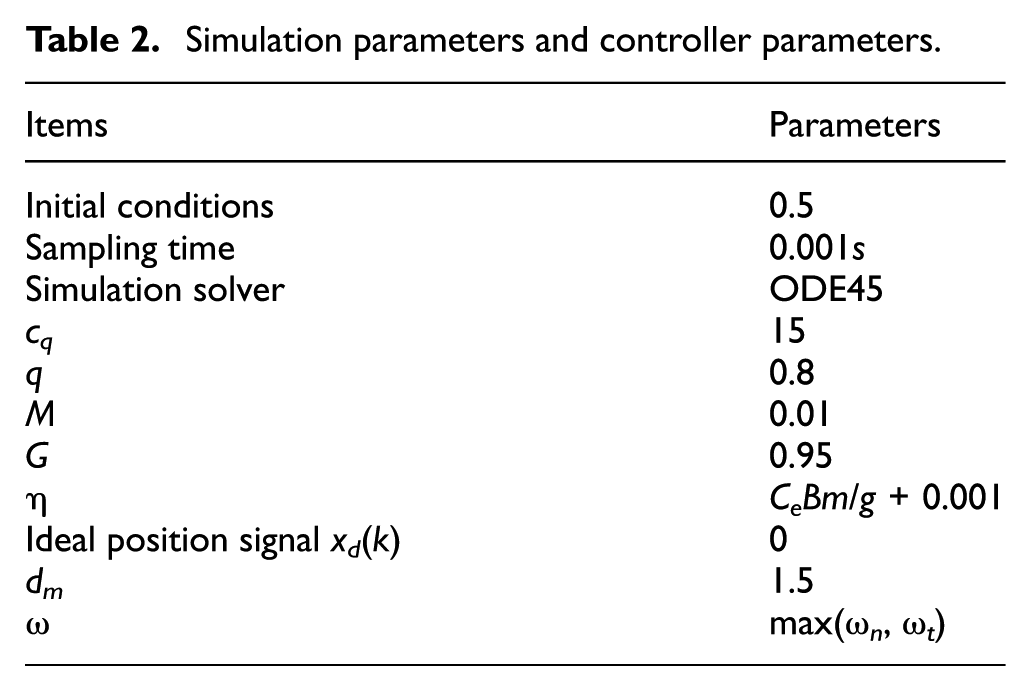
Figure 2 shows the uncontrolled divergent displacements and velocities of flap(z)/lead-lag(y) motions. Displacements and velocities are both divergent and unstable. As time goes on, the blade might appear fracture failure in the direction of flap-wise motion or lead-lag motion. In particular, the lead-lag(y) motion shows a greater divergence, which will cause greater damage in the actual operation of blade. To make them convergent and stable is exactly the purpose of control below.
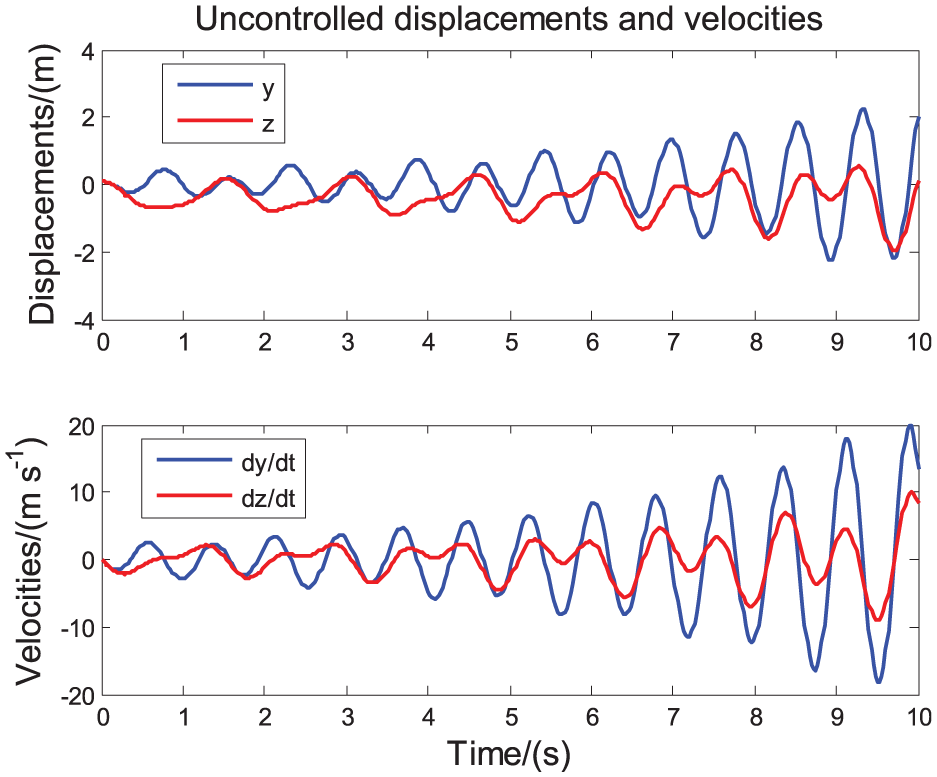
The uncontrolled divergent displacements and velocities of flap(z)/lead-lag(y) motions.
Comparisons of control performance between SMC and SMC/DO
For the comparisons of control performance between SMC and SMC/DO, Figure 3 demonstrates the controlled displacements and velocities of flap(z)/lead-lag(y) motions, and the signals of control input and sliding mode function (c), under control of discrete SMC and discrete SMC/DO, respectively. Compared with the uncontrolled displacements and velocities in Figure 2, the controlled displacements and velocities under control of both SMC and SMC/DO in Figure 3 demonstrate obvious convergence and stability with smaller vibration amplitudes, and converge to the ideal position signals xd within 10 s. In particular, the flutter suppression of the amplitudes of lead-lag(y) motion is more obvious, which reflects the ideal control effect.
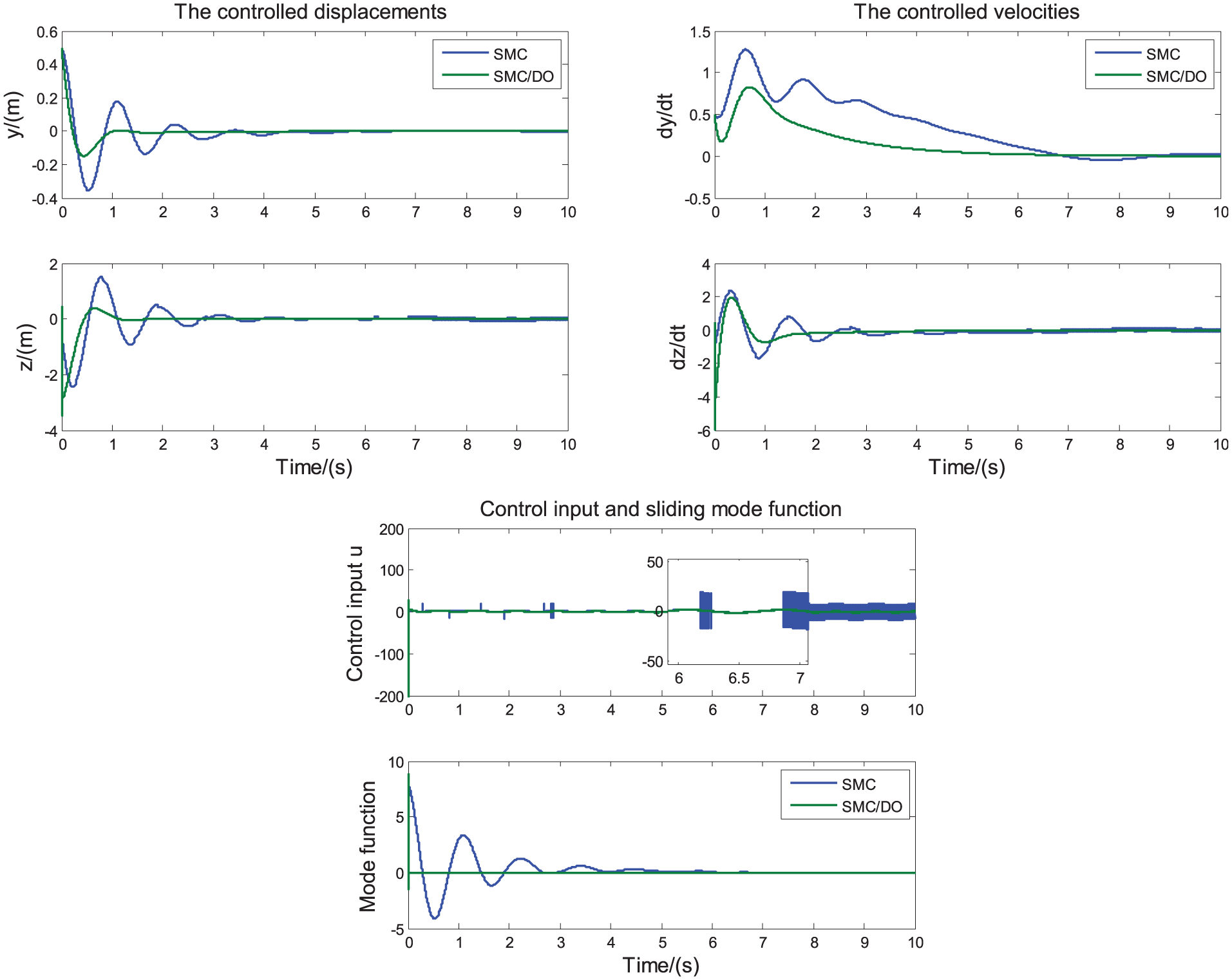
The controlled displacements and velocities of flap(z)/lead-lag(y) motions, and the signals of control input and sliding mode function, controlled by discrete SMC and SMC/DO, respectively.
Also, another more significant feature is that, with respect to SMC, SMC/DO exhibits a superior flutter suppression performance, which further validates the previous formula derivation in the “Convergence of disturbance observer and stability under SMC/DO controller” section.
It should be stated that Figure 3 also shows the signals of control input and sliding mode function, under control of SMC and SMC/DO, respectively. Compared with SMC, both the control input and sliding mode function of SMC/DO show almost perfect superiority. The control input under SMC shows greater amplitude and sudden fluctuation, and the local frequency is extremely high due to sliding mode chattering, which is not possible in practice. The amplitudes of the controlled fluctuation under SMC/DO are not only very small but also smooth. In particular, the sliding mode function of SMC/DO is almost zero, which shows the remarkable performance for both divergent instability control and eliminating chattering.
In addition, in order to verify the superiority of sliding mode algorithm itself over other intelligent algorithms, the application process of single neuron proportional-integral-derivative (SNPID) control with improved Hebb learning algorithm
18
is shown below. For the same controlled object in the “Comparisons of control performance between SMC and SMC/DO” section, Figure 4(a) demonstrates the flow chart of SNPID algorithm. Herein, the calculus module calculates three quantities
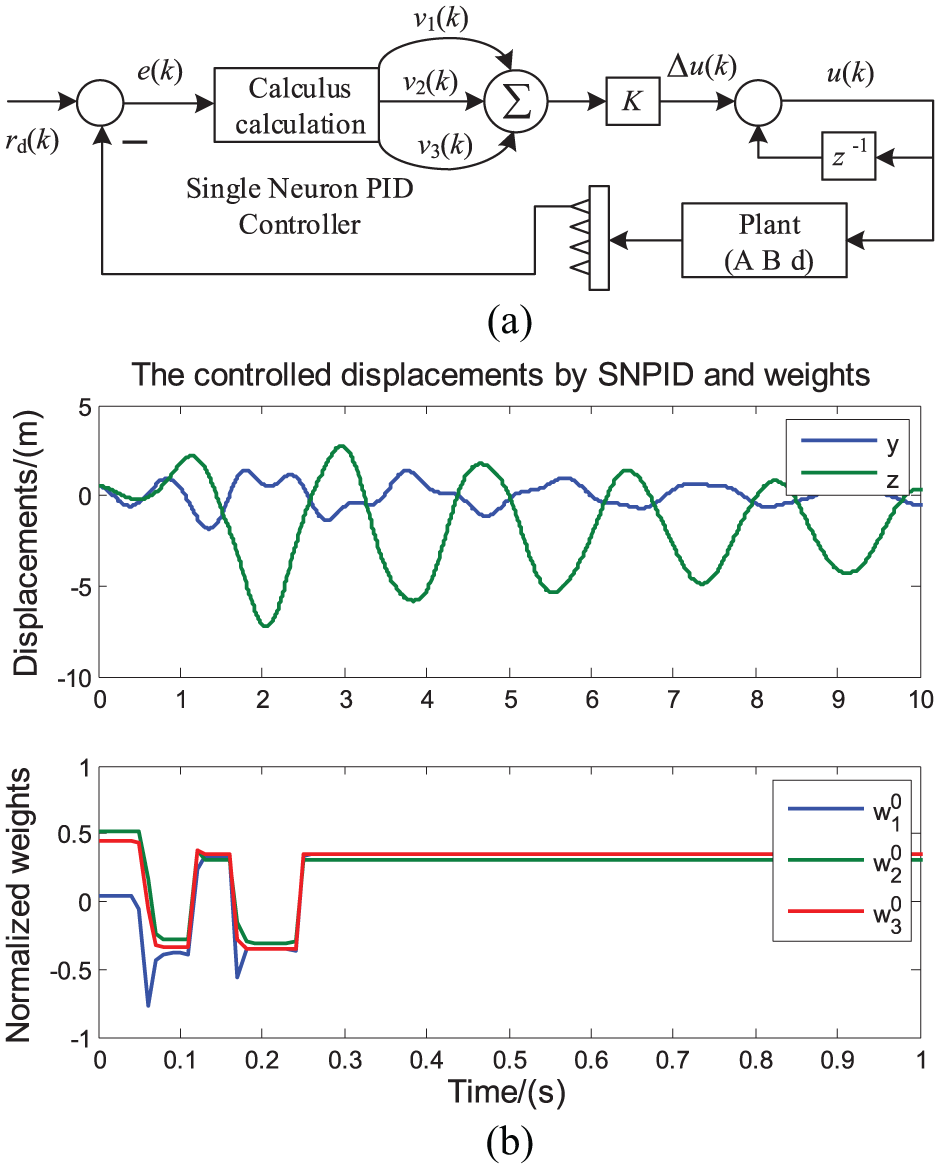
(a) The flow chart of SNPID algorithm and (b) the controlled displacements for both y and z and the normalized weights.
Using the improved Hebb learning algorithm, update rules of the three weights can be written as 18
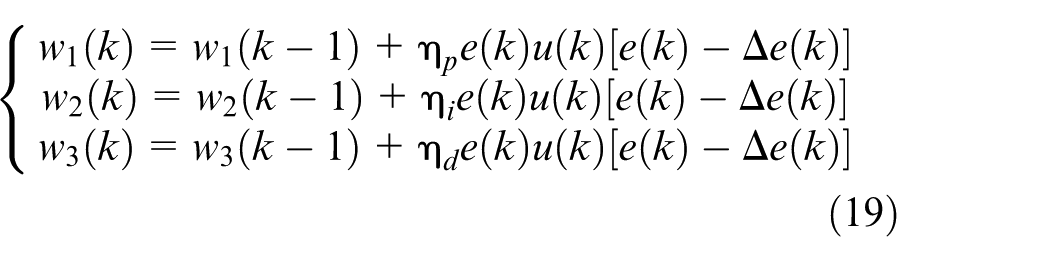
where η p , η i and η d are adaptive proportional, integral and differential learning rates respectively. The three weights are the system state variables, so the control law is written as

where the normalized weights are

Compared with the controlled displacements by SMC or SMC/DO algorithms in Figures 3 and 4(b) illustrates the controlled two displacements that show not only the larger amplitudes but also the larger fluctuation frequencies, which shows the poor control performance, although the two controlled displacements show converging states on the whole. At the same time, Figure 4(b) also shows the fluctuations of weighting values, which stabilize within 0.3 s, which reflects not only a good control mechanism, but also the maximum ability of proportional-integral-derivative (PID) regulation. However, under the control of this maximum ability, the result of this SNPID algorithm is still not as good as that of SMC or SMC/DO algorithms.
Robustness and superiority of SMC/DO algorithm based on different perturbations
In order to verify the robustness of the SMC/DO algorithm and the superiority of its performance, Figures 5 and 6 show the displacements and velocities, and the control inputs and sliding functions under control of SMC (Figure 5) and SMC/DO (Figure 6), respectively, with different amplitudes of perturbed disturbance in aerodynamic model set.
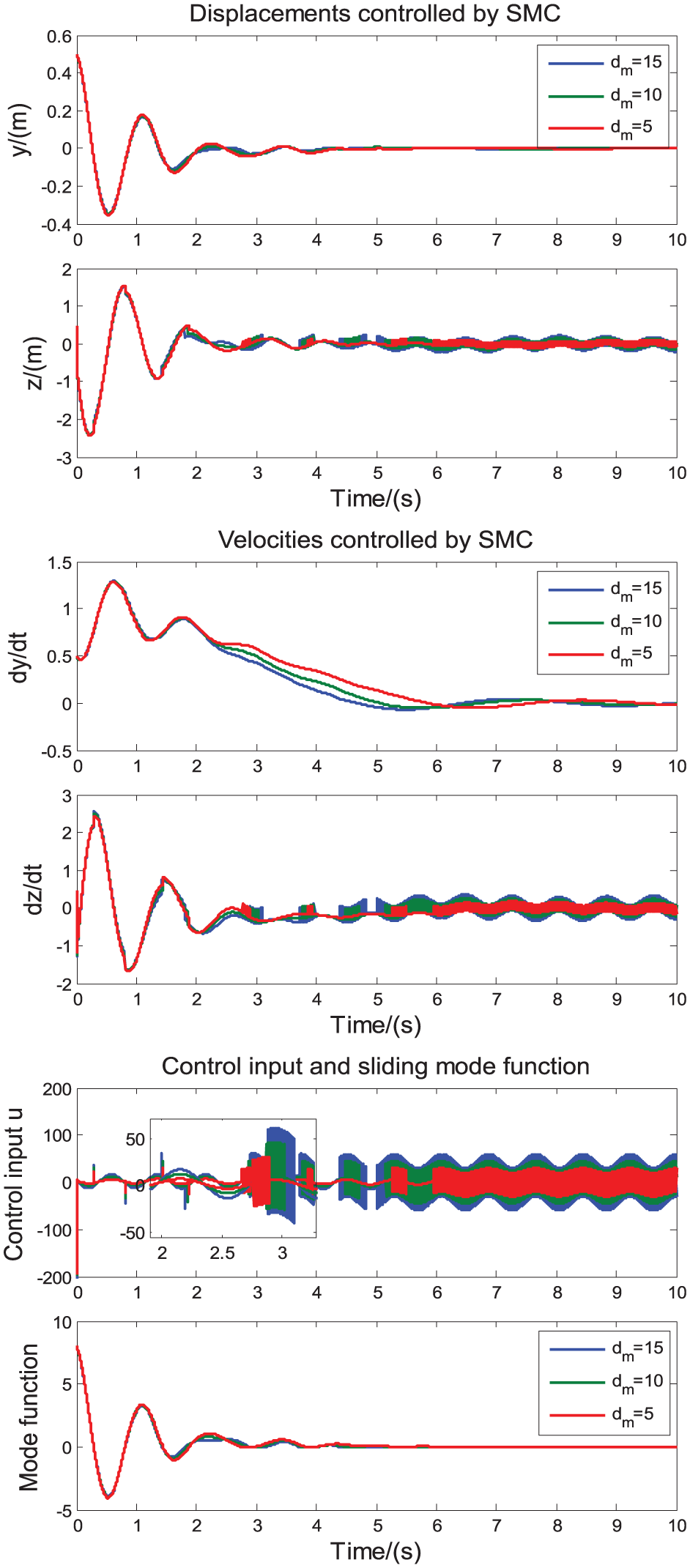
Displacements and velocities, and the control inputs and sliding functions under control of SMC, with different amplitudes of perturbed disturbance in aerodynamic model set.
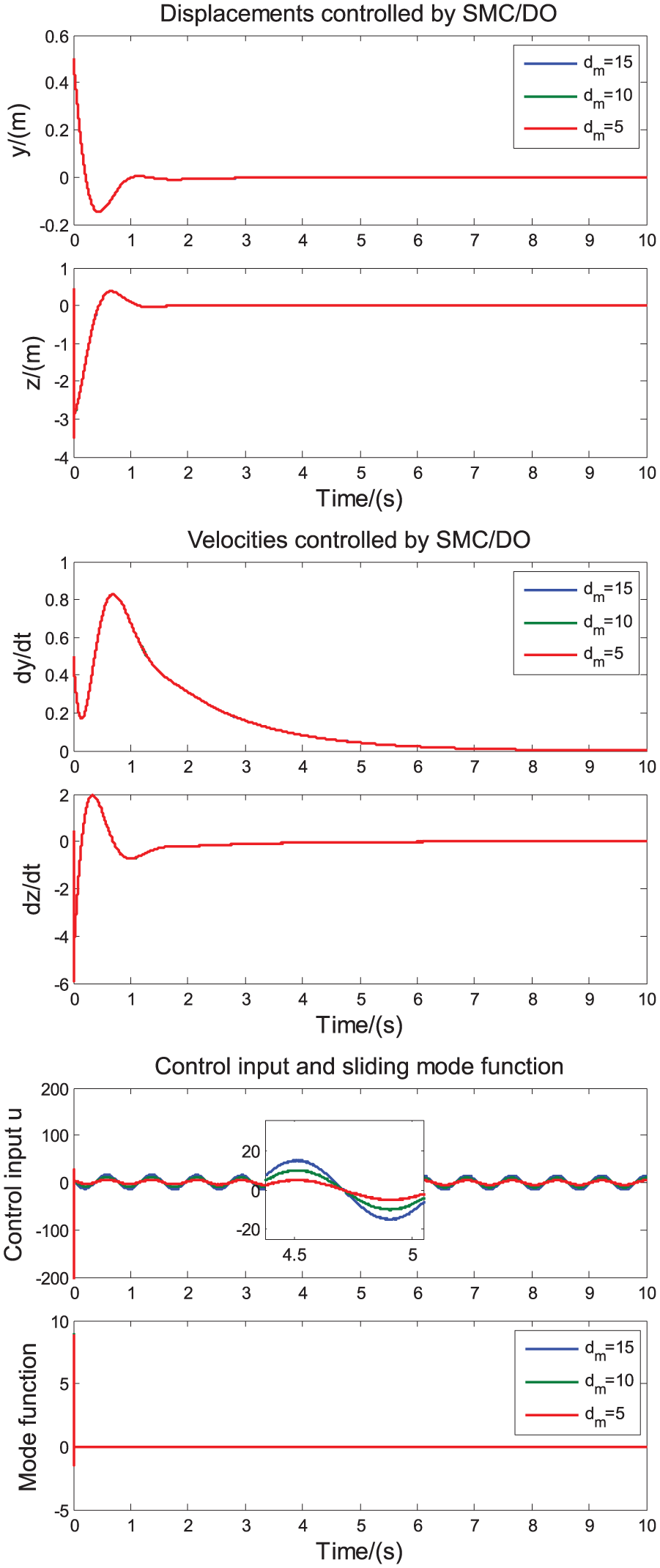
Displacements and velocities, and the control inputs and sliding functions under control of SMC/DO, with different amplitudes of perturbed disturbance in aerodynamic model set.
Let the amplitudes dm of the perturbed disturbance signals d(k) be 5, 10, 15, respectively. From the view of vibration amplitudes and vibration trends of displacements and velocities in Figure 5, it embodies good control ability of SMC, except for the phenomenon of negative chattering of flap-wise(z) signals in both displacements and velocities. The chattering phenomenon increases with the increase of disturbance amplitude dm, which is more apparent in control input.
Figure 6 shows items of the same category as Figure 5 under control of SMC/DO controller. For the actuation signals with different dm, the vibration amplitudes and trends of displacements and velocities, and sliding mode functions in Figure 6 are exactly the same, which means that the SMC/DO algorithm is insensitive to the aerodynamic disturbances and shows better control performance in contrast with SMC algorithm.
In addition, with respect to control inputs in Figure 6, the chattering phenomenon of high frequency is completely disappeared, which reflects the superior chattering suppression performance of SMC/DO controller. At the same time, for different amplitudes dm in actuation, the fluctuations of control input signals are all very smooth, and only show the slight amplitude differences, which further verifies the robustness of the SMC/DO algorithm and its superiority over SMC.
Performance improvement and automation (PIA) of SMC/DO controller
Consider the performance control matrix
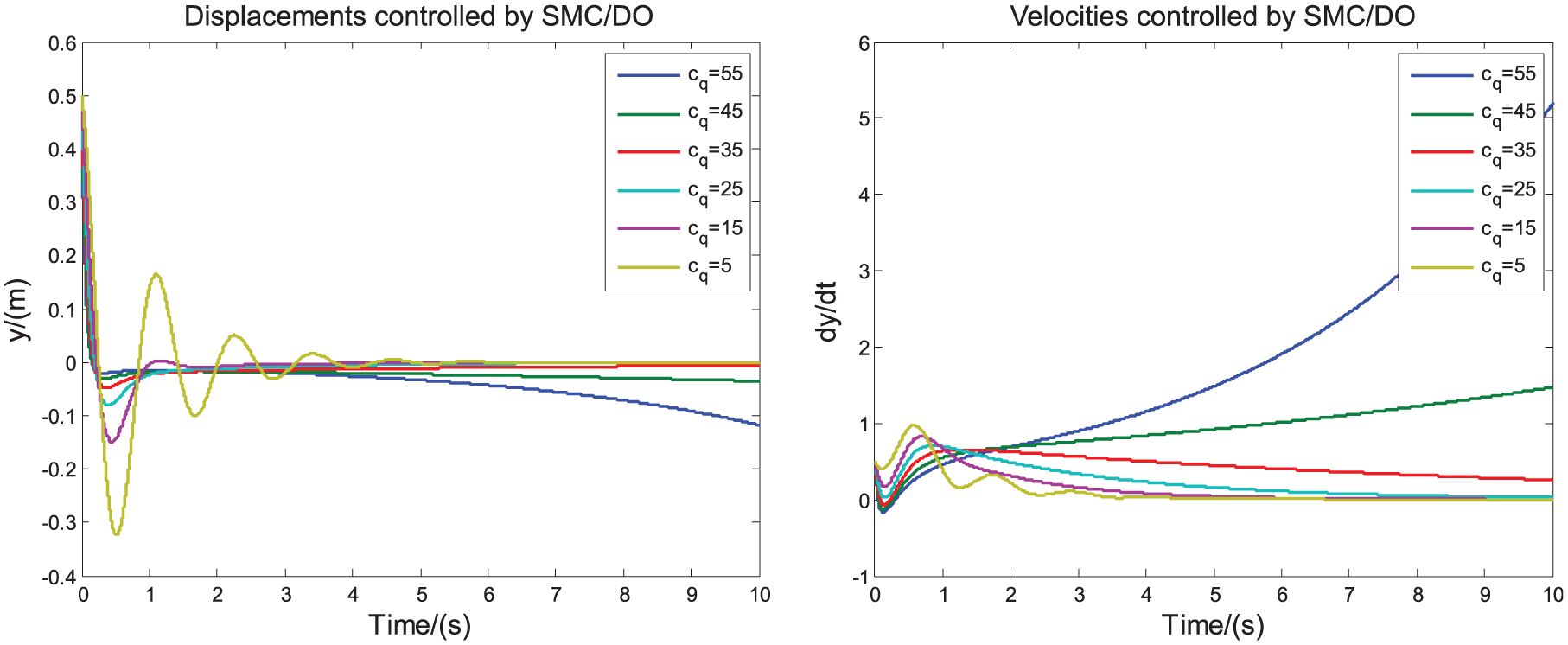
The displacements and velocities of lead-lag motions under different conditions of
In order to facilitate the realization of computer control and automation and at the same time to ensure certain accuracy, a design of quadratic feedback to build the performance control matrix Ce is developed in present study.
The controller is designed as

then system equation (4) can be transformed as

where
First, suppose Lyapunov function V and mode function s are as follows

then there exists
due to the existence of a certain moment k, satisfy s(k) = 0, then

To ensure that V(k + 1) is less than 0, it is necessary to prove that

According to the linear matrix inequality (LMI) design, there must be a symmetric positive definite matrix P. Hence there exists

where R = 0.01 is the weighting coefficient of the control item in the LQR design.
Inserting Ce of equation (23) into the calculations in the “Discrete SMC/DO controller” section, both the convergence of disturbance observer and the stability under control of SMC/DO controller can also be confirmed.
For numerical simulation verification of PIA of SMC/DO controller, the case dm = 15 of the perturbed disturbance signal d(k) in Figure 6 is still taken as an example. Figure 8(a) shows the displacement responses and Figure 8(b), control signals. In contrast with the displacement responses in Figure 6, the responses demonstrated in Figure 8(a) maintain moderate vibration amplitudes and show better vibration trends, except for a very slight chattering that is completely within the acceptable real-time control range. Compared with the control input in Figure 5, the performance of the control input in Figure 8(b) is at the same level, which means the theoretical feasibility of PIA of SMC/DO algorithm.
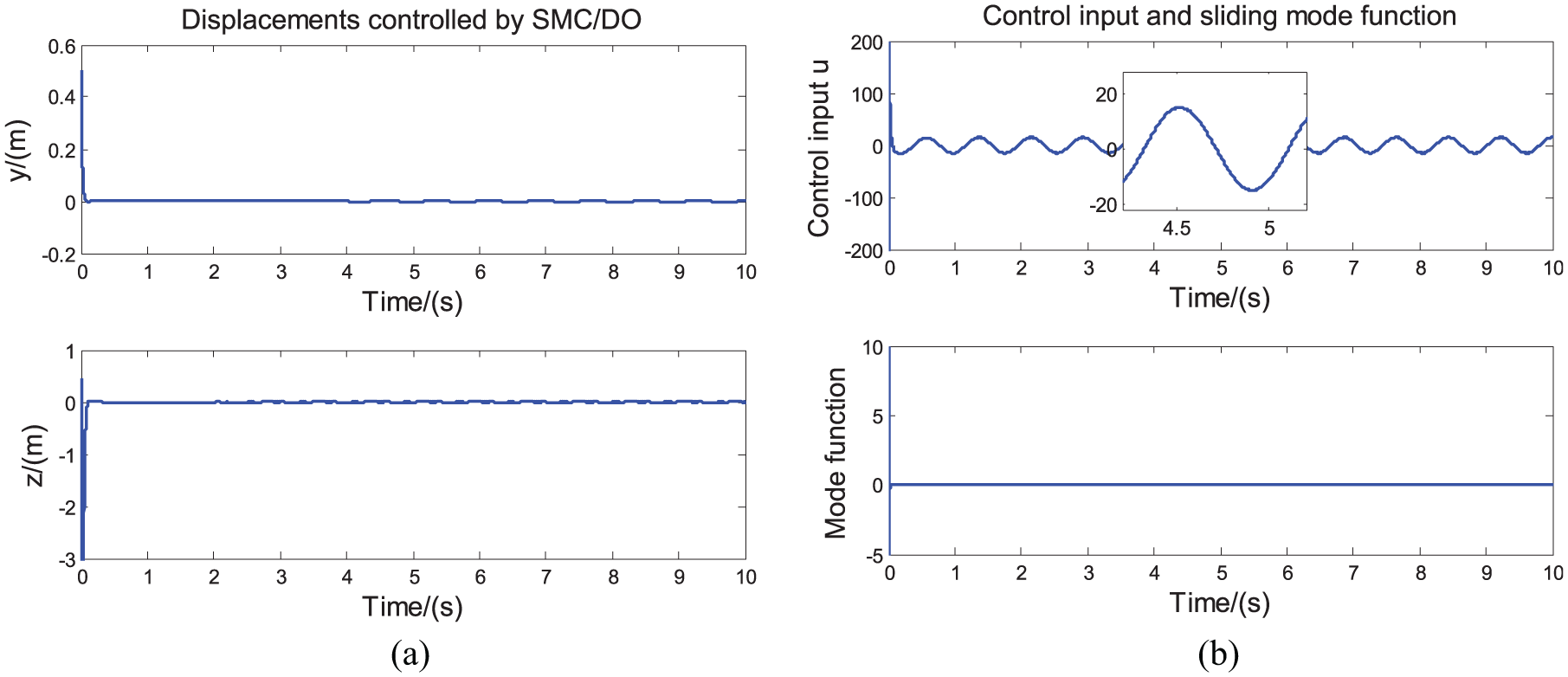
(a) Displacement responses and (b) control signals under PIA of SMC/DO controller.
In addition, some details need to be outlined further. (1) The physical meaning of the control signal u(k) in equation (3) can be described as displacement signal of hydraulic or pneumatic cylinders, which can be used to drive physical structure such as blade variable pitch system and trailing-edge flaps or microtabs mentioned earlier. (2) The mass element and chord length of blade section are not constant. It changes with the radius r. The rules of variation against r for specific airfoil NACA 63-215 can be found in Liu and Chang. 7 (3) The physical meaning of disturbance in equation (4) actually refers to the unpredictable fluctuating effects of unstable aerodynamic forces. When it is designed as a random noise fluctuation signal with the maximum amplitude of dm, the control law of this design can also meet the control requirements.
Real-time effect of control algorithm
The wind power system is mostly controlled by PLC as mentioned above. For complex intelligent control algorithms, discrete algorithms are easier to be implemented in PLC. An experimental platform was built based on hardware-in-the-loop simulation and Object Linking and Embedding (OLE) for Process Control (OPC) technology to testify the real-time effect of intelligent control algorithms in Liu. 19 However, it is a complex technical operation process. For discrete algorithms, the PLC controller only needs to collect the discrete data variables from the controlled aeroelastic system and transmit the discrete control signals directly to the aeroelastic system. Therefore, the simplified hardware-in-the-loop simulation and OPC technology can be directly applied in this study.
The discrete control algorithm runs directly in Siemens S7-200 PLC controller, and the aeroelastic system model is set up in the MATLAB simulation environment. The controller hardware and the simulation environment are connected by OPC technology, with the signal interaction being realized. 19 This hardware-in-the-loop simulation platform can effectively test the real-time effect of the control algorithm.
Still take the previous case under PIA of SMC/DO algorithm in Figure 8, for example, with real-time feasibility shown in Figure 9(a) shows the touch screen interface which is connected to the port of PLC; Figure 9(b) shows the control input signal u and the sliding mode function.
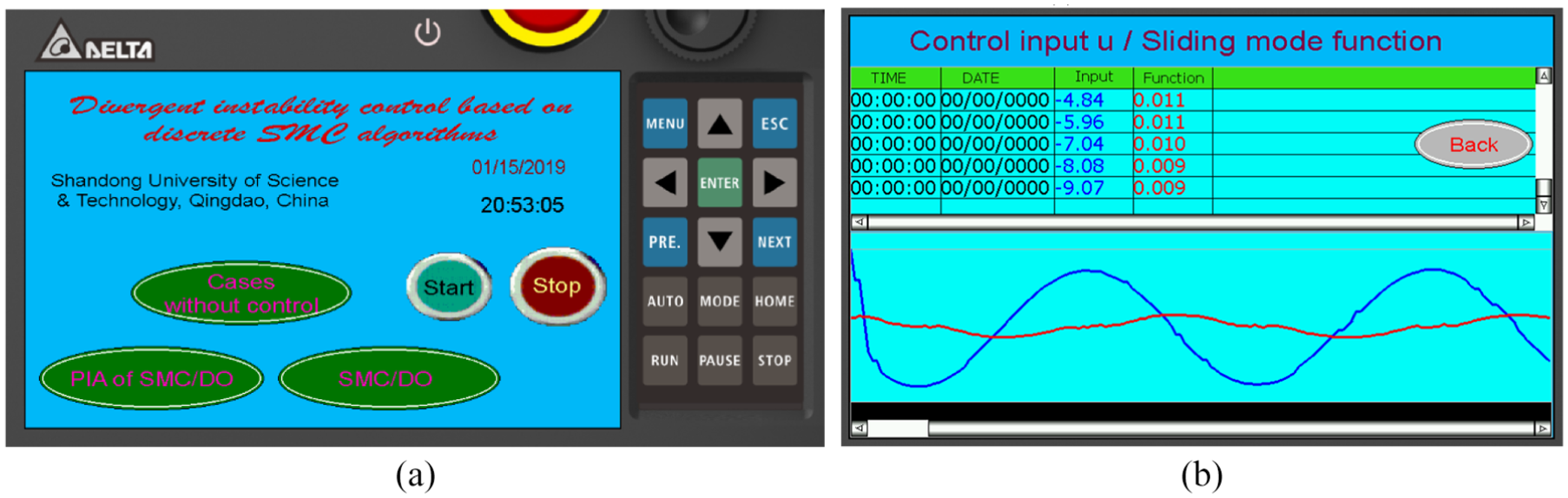
The real-time effect of PIA of SMC/DO algorithm demonstrated in the controller hardware: (a) the touch screen interface and (b) the control input signal u and the sliding mode function.
Compared with the control signals using numerical simulation in Figure 8(b), the measured values of the control signals in Figure 9(b) reveal an excellent agreement not only from the fluctuation trends, but also from the fluctuation values. The real-time effect of PIA of SMC/DO algorithm running in the controller hardware is verified, which further verifies the effectiveness of the control algorithm in disturbance control. It is beneficial to the practical implementation of the engineering problem.
Conclusion
In this study, divergent instability vibration control for flap-wise and lead-lag displacements of structural damping-integrated blade section based on discrete SMC and SMC/DO algorithms is investigated by theoretical derivation and numerical simulation. Some concluding remarks including novelty and practicality can be outlined as follows:
Structure model is a 2D damping-integrated section model, which is driven by aerodynamic forces under perturbed disturbance. Realization of divergent instability control of aeroelastic system is based on discrete SMC algorithms.
A scheme of disturbance control is found in present study. Discrete sliding mode control algorithm suitable for disturbance control is investigated to control divergent flap/lead-lag vibrations of blade section. Theoretical deduce of design and analysis of discrete SMC controller is investigated. Convergence analysis of disturbance observer and stability analysis under discrete SMC/DO controller are formulated in detail.
The numerical simulation results show that not only the convergence accuracy can be improved by SMC/DO, but also the displacement chattering and the control input chattering can be effectively eliminated. Most important of all, the SMC/DO algorithm is not sensitive to the disturbance signal and is suitable for the disturbance signal with large amplitude actuation. Compared with discrete SMC, it has more advantages in divergent instability control and disturbance control for aerodynamic system.
To facilitate the realization of computer control and automation, a design of quadratic feedback to build the performance control matrix Ce is developed in SMC/DO controller in present study. The hardware-in-the-loop simulation platform reveals the real-time feasibility of PIA of SMC/DO algorithm.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (grant no. 51675315).