
Abstract
In the past, most researchers focused on the storage space allocation problem or container block allocation problem in maritime container terminals, while few studied the container slot allocation problem in rail–water intermodal container terminals. Container slot allocation problem is proposed to reduce relocation operations of containers in railway container yards and improve the efficiency of rail–water intermodal container terminals. In this paper, a novel outbound container slot allocation model is introduced to reduce the rehandling operations, considering stowage plan, containers left from earlier planning periods and container departure time. A novel heuristic algorithm based on the rolling planning horizon approach is developed to solve the proposed problem effectively. Computational experiments are carried out to validate that the proposed model and algorithm are feasible and effective to enhance the storage effect. Meanwhile, some other experiments are conducted to verify that our approach is better than the regular allocation approach, which is a common method in marine and railway container terminals, and container weight is the most important influence factor when storing containers.
Keywords
Introduction
Intermodal transportation is defined as the successive use of a variety of modes of transportation, such as road, railway, water and air, without handling the goods during transfers between modes. 1 Nowadays, intermodal transportation has developed rapidly, especially rail–water intermodal transportation.
In 2015, One Belt and One Road has been proposed as an important development initiative by Chinese government. As a result, the number of rail–water intermodal container terminals increases sharply. In rail–water intermodal container terminals, other than quayside area, container yards, inner truck travelling paths and gates, the railway operation area, where many containers transported by train are handled and stored, is also an important part. To save space for rail–water intermodal container terminals, railway container yards are built next to the railway tracks (see Figures 1 and 2), such as Dalian Rail–water Intermodal Container Terminals and Chongqing Rail–water Intermodal Container Terminal. So, rail mounted gantry cranes (RMGCs) are responsible for both handling operations and storage operations. As a result, rational utilization and allocation of railway container yard’s space and handling resources have become dispatcher’s key issues. In addition, because it is difficult to coordinate arrival time or departure time of containers between trains and vessels, outbound and inbound containers transported by train usually need to be stored in railway container yards. Thus, storage space allocation is the vital basis and constraint for other resource utilization in railway container yards.

An example of the railway container yard in Dalian Rail–water Intermodal Container Terminal.
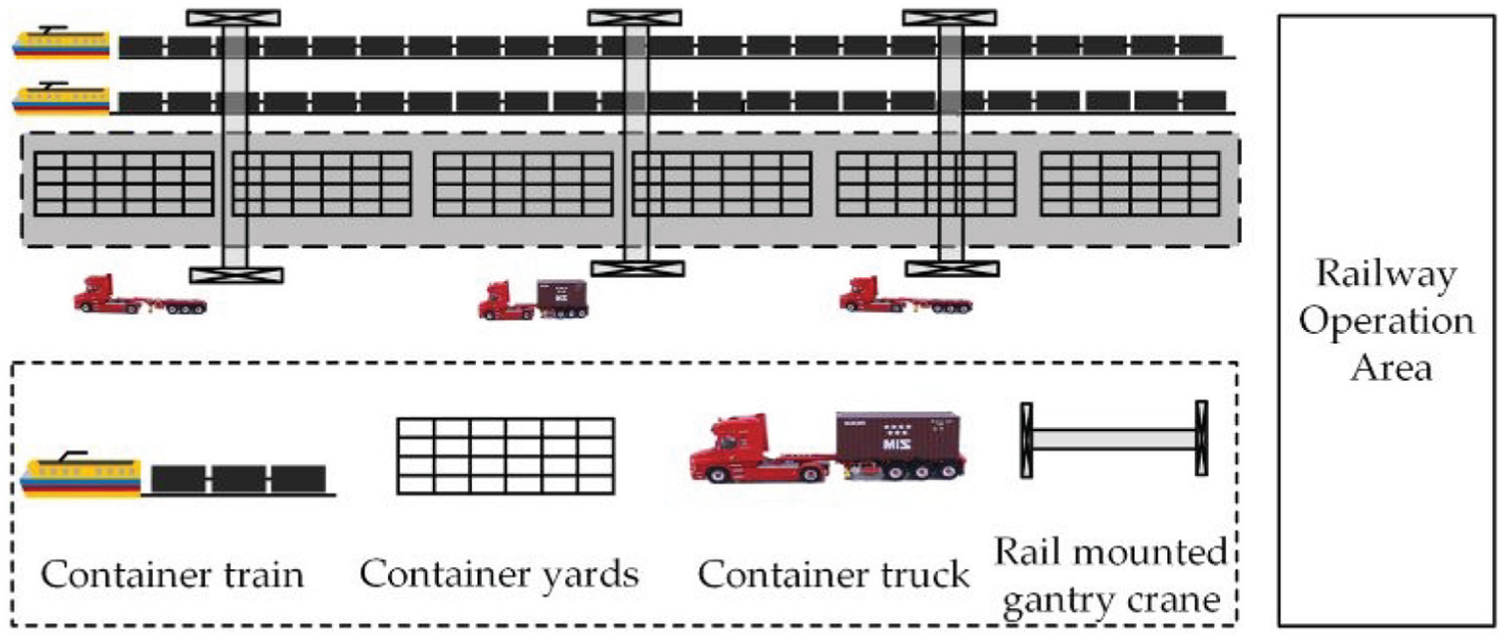
A schematic diagram of a railway container yard in a rail–water intermodal container terminal.
As is mentioned by Bazzazi et al., 2 storage space allocation problem is a critical scheduling strategy defined as the temporary allocation of inbound/outbound containers to the blocks/slots at each period with the aim of balancing the workload between blocks to minimize the storage/retrieval times of containers. According to the description, storage space allocation problem can be divided into two sub-problems: container block allocation problem and container slot allocation problem. Container block allocation problem deals with assigning the arrival containers to the optimal blocks in the railway container yard, while container slot allocation problem deals with assigning the arrival containers to the specific positions of the block in the railway container yard. The specific positions can also be called slots, which are some small units made up of railway container yards. As a result, the objective of the former is to balance the workload of different blocks, while the latter aims at reducing the number of rehandling operations. In addition, container block allocation usually precedes container slot allocation, while container slot allocation can determine the optimal slots in the railway container yard for each container. Meanwhile, container slot allocation problem is seldom studied in previous studies. Therefore, in this paper, we mainly consider container slot allocation problem of the railway container yard in the rail–water intermodal container terminal.
Because of the structure of vessels, positions of outbound containers in vessels must obey the stowage plan and some other rules during the voyage. This will also lead to storing outbound containers in the railway container yard more complicated. Consequently, only outbound containers are considered in the paper. Meanwhile, when storing outbound containers, weight and arrival port order of containers should be considered according to the stowage plan. Arrival port order means that the order of containers in the same vessel arriving at different destination ports. In addition, departure time of containers and containers left from earlier planning periods should also be considered.
As a result, the main contributions of this paper are (1) the container slot allocation problem is studied to allocate arrival outbound containers to the optimal slots in the railway container yard so that the number of rehandling operations will be reduced; (2) stowage plan (container weight and arrival port order), departure time and containers left from earlier planning periods are considered in the container slot allocation problem and (3) a novel heuristic algorithm (HA) is developed, which introduces the rolling planning horizon.
The remainder of this paper is organized as follows: the relevant literature is presented in next section. The outbound container slot allocation problem in rail–water intermodal container terminals is described and formulated in section ‘Problem description’ and section ‘Problem formulation’, respectively. A novel HA based on the rolling horizon approach is introduced in section ‘Solving algorithm’. Computational results are analysed in section ‘Case study’ and eventually section ‘Conclusion’ covers the conclusion and proposes the future research direction.
Literature review
According to Carlo et al., 3 there are four main decision problems in the storage yard operations: (1) yard design, including material handling equipment (MHE) selection and storage yard layout;4,5 (2) storage space allocation to containers;6,7 (3) MHE dispatching and routing to serve the storage and/or retrieval requests8,9 and (4) optimizing the reshuffling of containers.10,11
In this paper, we mainly focus on the second one: storage space allocation to containers, which has become one of the hottest issues affecting the efficiency of container terminals. Most of the literatures concentrated on the storage space allocation problem or container block allocation problem in the maritime container terminal to reduce the reshuffling operations and balance the workload. Kim et al.12,13 discussed the storage space allocation problem in maritime container terminals: the former considered only outbound containers and designed two HAs, while the latter considered inbound and outbound containers together and real-time strategic planning. Kozan and Preston 14 modelled the seaport system to determine the optimal storage strategy and container-handling schedule, which combined a container-transfer model with a container-location model in a planning horizon. A genetic algorithm, a Tabu search and a Tabu search/genetic algorithm hybrid were developed to solve the problem. Lee and colleagues15,16 developed a yard storage allocation problem in a transhipment hub and proposed a consignment strategy to reduce reshuffling. Two HAs were introduced to solve the problem. Bazzazi et al. 2 adopted an efficient genetic algorithm to solve an extended storage space allocation problem in a maritime container terminal, considering the type of containers.
Yu and Qi 17 presented the block allocation problem and considered three optimization models under various strategies of storing containers. Then, they used simulation to validate the models and solution approaches. Sharif and Huynh 18 developed a novel method using ant-based control for positioning containers to storage blocks in marine container terminals so that the workload among yard blocks was balanced and the distance travelled by trucks between yard blocks and berths was minimized. Wang et al. 19 studied the storage space allocation problem under the mixed storage mode in railway container terminals and developed a two-stage optimization model. Jiang et al. 20 proposed a systematic approach called ‘space allocation given long-term plan (SALP)’ to balance the current and future effects of short-term planning. Two storage strategies were introduced to evaluate the SALP approach. Mao et al. 21 focused on the storage space allocation problem to enhance the efficiency of the container yard. However, they did not consider the detailed storage allocation constraints.
Moreover, only a few studies were concerned with the container slot allocation problem or rail–water intermodal container terminals. Liu and Yang 22 established a two-stage optimization model on multi origin-destination-fare container rail–water intermodal transportation based on revenue management, considering features of freight organization and customer segmentation of container rail–water intermodal transportation. Li et al. 23 developed a container slot allocation model considering the stowage plan in rail–water intermodal container terminals. However, they assumed that bays in container yards were empty before storing the containers. It is unreasonable that the bays are empty; in general, there must be some containers left from earlier planning periods. Meanwhile, they did not consider the departure time of containers. Wang et al. 24 studied container slot allocation problem and developed an iterative solution procedure to solve the problem. However, they only considered time constraint and ignored the stowage planning. Wu and colleagues25,26 concentrated on storage space allocation problem to balance the operation quantity of the container area in rail–water intermodal container terminals. However, they did not consider the specific storage constraints.
Based on all the studies above, most researchers concentrated on the storage space allocation problem in maritime container terminals. Most of them paid attention to the container block allocation problem, which was not to assign arrival containers to the specific slots in the container yard. Although the objective was to reduce the relocation operations or balance the workload of different blocks, they neglected the constraints that affect the container locations in their studies. Meanwhile, only few dealt with the container slot allocation problem. Moreover, specific literature on the storage space allocation problem in railway or rail–water intermodal container terminals is scarce. Some researchers did consider storage principles in the container slot allocation problem; however, they only focused on some of storage principles and few considered weight constraint, arrival port order constraint and departure time constraint together. In addition, most researchers ignored containers left from earlier planning periods in the container yard, which can also affect the storage effect.
Therefore, in this paper, the container slot allocation problem of outbound containers in the rail–water intermodal container terminal is studied, considering not only the stowage plan (the weight and arrival port order of containers), but also containers’ departure time and containers left from earlier planning periods in the railway container yard.
Problem description
Some background
Before formulating a mathematical model, first some concepts and background of the container slot allocation problem will be introduced. As shown in Figures 1 and 2, the railway container yard in a rail–water intermodal container terminal is next to railway tracks, which is made up of some blocks. Figure 3 shows an example of a block. A block is comprised of several parallel bays. Each bay is composed of several stacks and each stack consists of several layers.
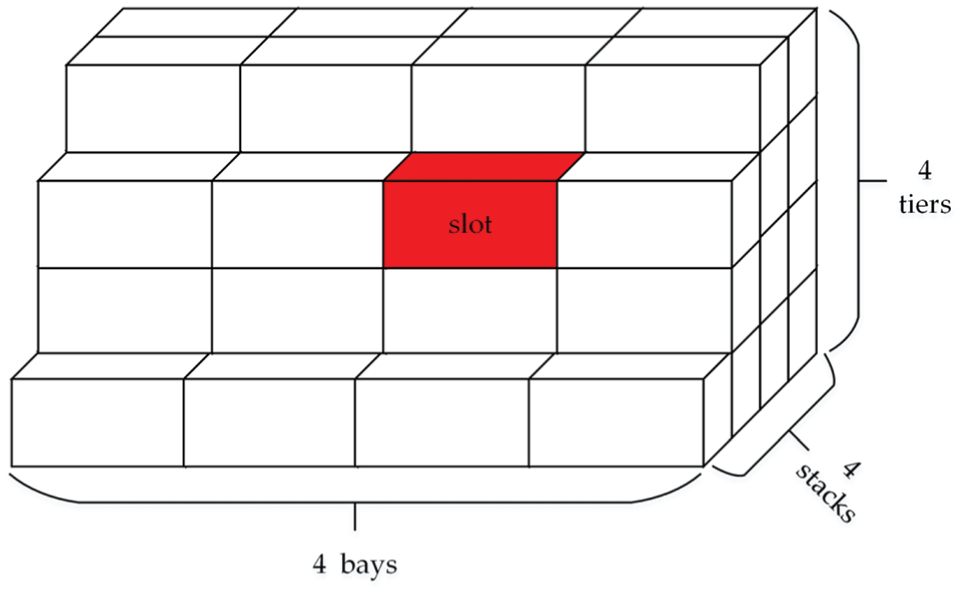
An example of a block.
Like the maritime and railway container terminals, there are two storage modes in rail–water intermodal container terminals as well: the first one is the inbound and outbound containers mixed storage mode, while the second one is the inbound and outbound containers separated storage mode. Although the mixed storage mode can save space for the railway container yard, it will increase the workload of the handling equipment and cut down the efficiency of the whole terminal. Moreover, high quality of storage rules will be required, which increases the difficulty for dispatchers. Meanwhile, in most marine and railway container terminals, inbound and outbound containers are stored separately to improve the efficiency of the storage yard. According to these reasons, we also adopt the inbound and outbound container separated storage mode, and we only consider outbound containers in this paper.
Also, according to Zhang et al., 6 a fixed horizon in the immediate future is introduced at each planning epoch, and the plan is executed accordingly up to the next planning epoch; then, a new plan is formulated based on the latest information and this pattern continues. Figure 4 shows an example of the rolling planning horizon. The container slot allocation problem is performed in each period of the planning epoch.
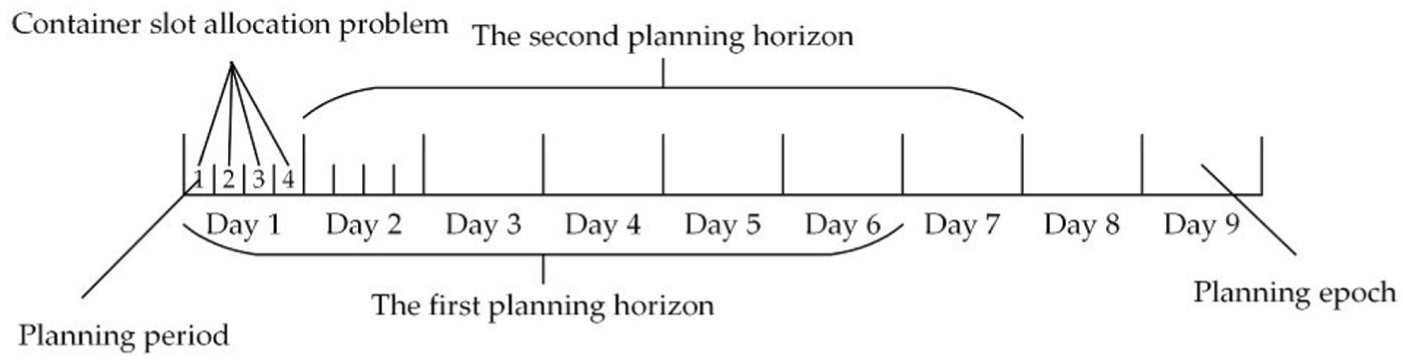
An example of the rolling planning horizon.
In the maritime container terminal, containers are usually stored based on vessel names and voyage numbers; while in the rail–water intermodal container terminal, containers of different vessels are assumed to be stored in the same bay. So, in a planning period or horizon, not all the containers in the railway container yard can be loaded onto the vessels, and there will be some containers left when the current period or horizon is over. Meanwhile, these containers can also influence the storage of next planning periods or horizons. Therefore, containers left from earlier planning periods also need to be considered in the problem.
Storage principles and overlapping amount
The slot allocation problem is to determine the optimal slot for each container of different vessels so that the rehandling operations of containers will be minimized, the utilization of the railway container yard will be maximized and the efficiency of the rail–water intermodal container terminal will be maximized.
To reduce the relocation operations of outbound containers, the stowage plan also needs to be considered in the slot allocation problem. According to the stowage plan, weight and arrival port orders of containers should also be taken into consideration. Moreover, since containers of different vessels are stored in the same bay, departure time of containers will also be considered. Meanwhile, we assume that when the departure time of different containers is the same, the containers are in the same vessel.
As a result, in this paper, some storage principles should be introduced when containers are allocated into slots of the railway container yard.
According to the stowage plan, the lighter containers usually are stored on the heavier containers in the containership so that the containership can maintain stability; so, in the railway container yard, heavier containers, on the contrary, should be stored on lighter containers to satisfy the stowage plan.
To guarantee the loading order of containers, containers with earlier departure time should be stored above the containers with later departure time in the railway container yard.
When containers have the same departure time, to reduce the relocation operations during navigation, containers with the farther arrival port should be stored above containers with the nearer arrival port in the railway container yard.
Then, we introduce container overlapping, which can be used to evaluate the storage state. Container overlapping means that containers in the same stack do not satisfy one of the storage principles mentioned above: the weight of upper layer containers is lighter than the weight of lower layer containers or the departure time of upper layer containers is later than the departure time of lower layer containers or when upper layer and lower layer containers have the same departure time, the arrival port of upper layer containers is nearer than the arrival port of lower layer containers. When these situations happen, container overlapping generates. Overlapping amount is a numerical value to record the amount of container overlapping.
Also, to describe the attributes of containers concisely, actual weight and departure time can be substituted by weight priority and departure time priority. The heavier the container, the greater the weight priority; the later the container departure time, the greater the departure time priority. In addition, the arrival port order ranks from the near to the distant and numbers from 1. Consequently, the information of the containers consists of the weight priority, departure time priority and arrival port order.
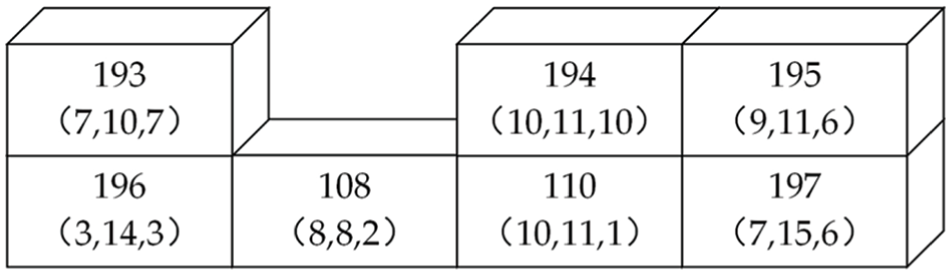
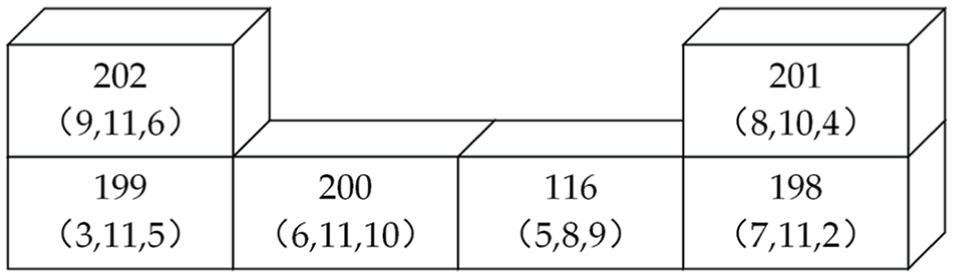
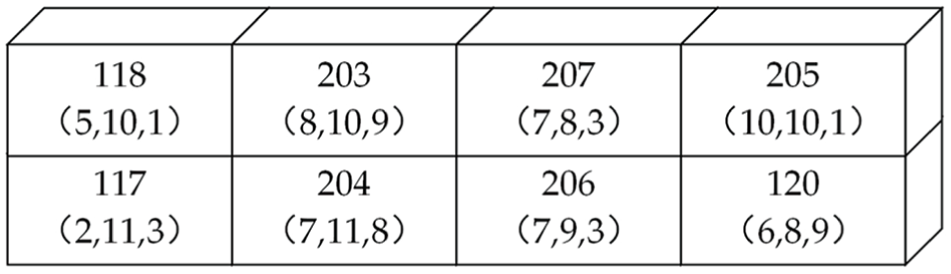
Figure 5 illustrates an example of the overlapping amount. The number outside the parentheses is the number of the container and the numbers inside the parentheses are weight priority, departure time priority and arrival port order. Thus, the overlapping amount in Stack 1 is 1, the overlapping amount in Stack 2 is 2 and the overlapping amount in Stacks 3 and 4 is 1. Stack 1 does not satisfy the third principle, Stack 2 does not satisfy the third storage principle, Stack 3 does not meet the second principle and Stack 4 does not fulfil the first storage principle.
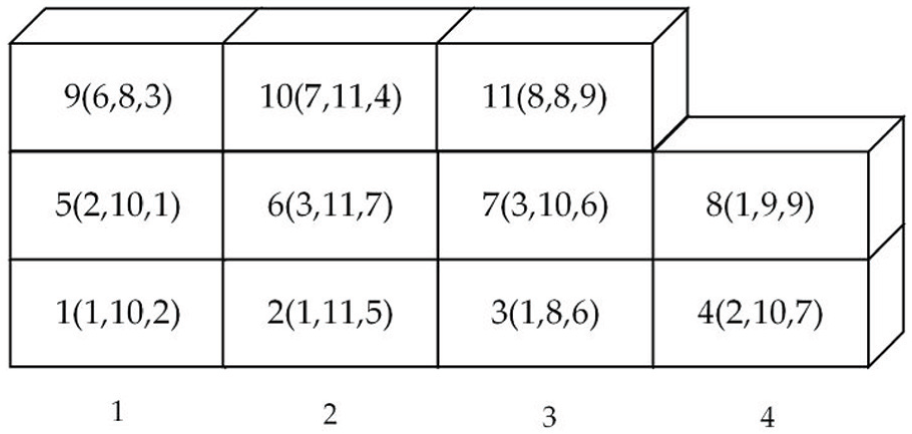
An example of container overlapping amounts.
Moreover, to avoid that there is no slot available to rehandle containers, it is set that the height of all stacks in the container yard or railway container yard cannot be stacked to the maximum height and enough empty slots must be set aside in the nearest side of each bay for rehandling the containers. Thus, the relationship between layers and empty slots is shown in Figures 6 and 7. As shown in Figures 6 and 7, the grey square box represents the slot stacks a container and the white square box represents an empty slot. So, if the containers in the bottom of Stack 3 need to be picked up, then the containers on it should be removed to the empty slots, which are also called the rehandling slots.
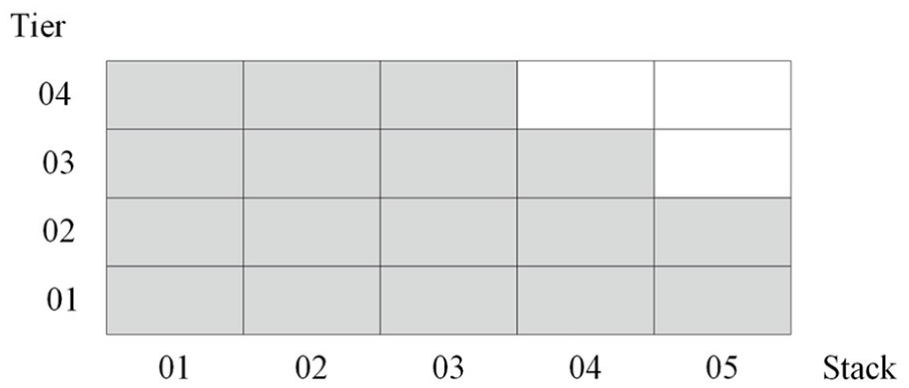
The rehandling slots of 4-layer storage height.
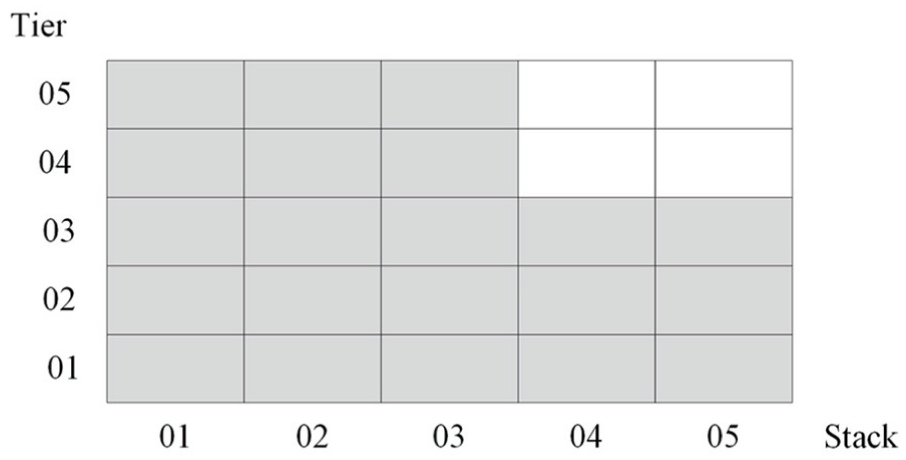
The rehandling slots of 5-layer storage height.
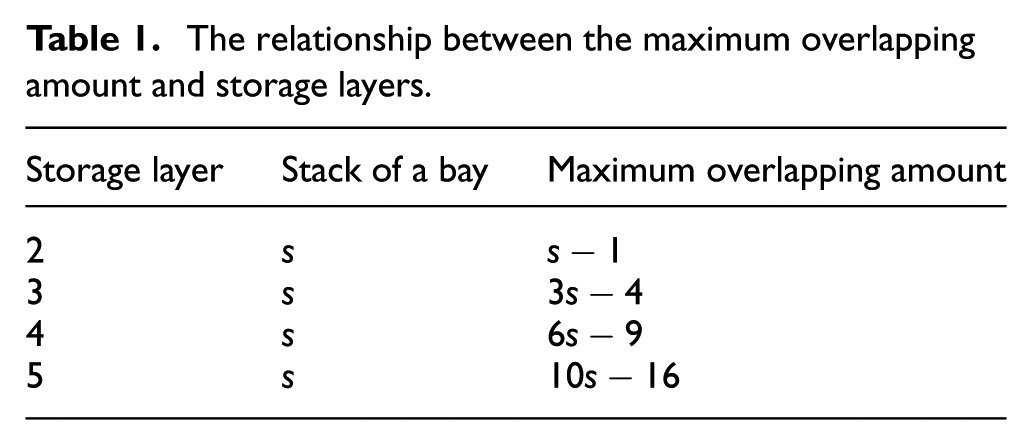
So, when there are two-layer containers in a bay, the maximum overlapping amount is the stack in the bay minus 1. As a result, according to the reckoning, when there are
The relationship between the maximum overlapping amount and storage layers.
Hence, in this paper, we formulate a slot allocation model based on the rolling planning horizons to minimize the total overlapping amounts by considering not only the three storage principles—the weight priority, departure time priority and arrival port order—but containers left from earlier planning periods.
Problem formulation
According to the problem description above, the slot allocation model of outbound containers based on the rolling horizon approach is formulated.
Assumption
The following assumptions are made for formulating the mathematical model:
It is assumed that the size and type of all the containers are the same.
The bay plan of the railway container yard is known in advance; in other words, the positions and attributes of the containers left from earlier planning horizons, such as weight priority and departure time priority, are known before.
The weight priority, departure time priority, arrival port order and arrival time of the new arrival containers are known in advance.
Notations and variables
The notations and variables in the mathematical model are introduced as follows:
Sets.
Parameters.
Decision variables.
The slot allocation model of outbound containers
Objective function
Based on the problem description in section ‘Problem description’, the objective function is written as follows

The objective function of our model is to minimize the overlapping amounts during the period

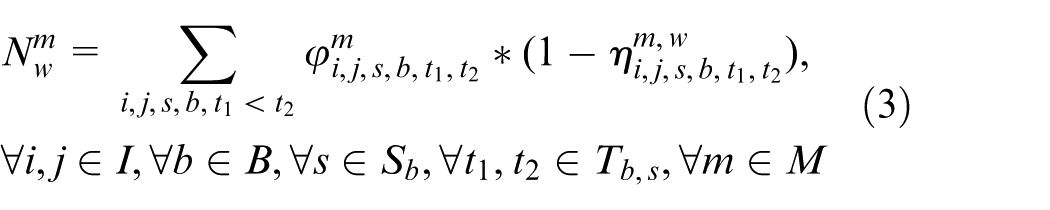
Equation (2) means that the overlapping amounts consist of container overlapping caused by storage constraints violation. Equation (3) indicates the calculation of the overlapping amounts violating the weight constraint during the period
Constraints
The constraints of the model are proposed as follows to ensure the practical feasibility of the solution.
1. Allocation operation constraints.
A slot in the railway container yard can be occupied by at most one container

Meanwhile, one container can occupy only one slot in the railway container yard

2. Workload constraints.
The number of containers to be stored in the railway container yard equals to the number of containers from the arrival trains during the period

3. Allocation position constraints.
Containers in the railway container yard cannot be assigned on the empty slots

The slot must be empty before container

The storage height of a stack
In addition, the relationship between decision variables

4. Allocation preference constraints.
The relationship among
The relationship among
The relationship among
5. Decision variable constraints.
The decision variable constraint is shown as follows
Solving algorithm
Since the rolling planning horizon is considered in the paper and we consider the characteristics of the proposed model, a novel HA is developed to obtain a close optimal solution effectively.
During the storage process, the arrival port order is considered when the departure time of containers is the same, so the departure time is the prerequisite; however, there is no compulsory order requirement for the weight priority and departure time priority. Thus, to describe the algorithm in more detail, an example is introduced: here, we take the first principle as the most important impact factor during the storage process and the flow chart of the HA is shown in Figure 8.
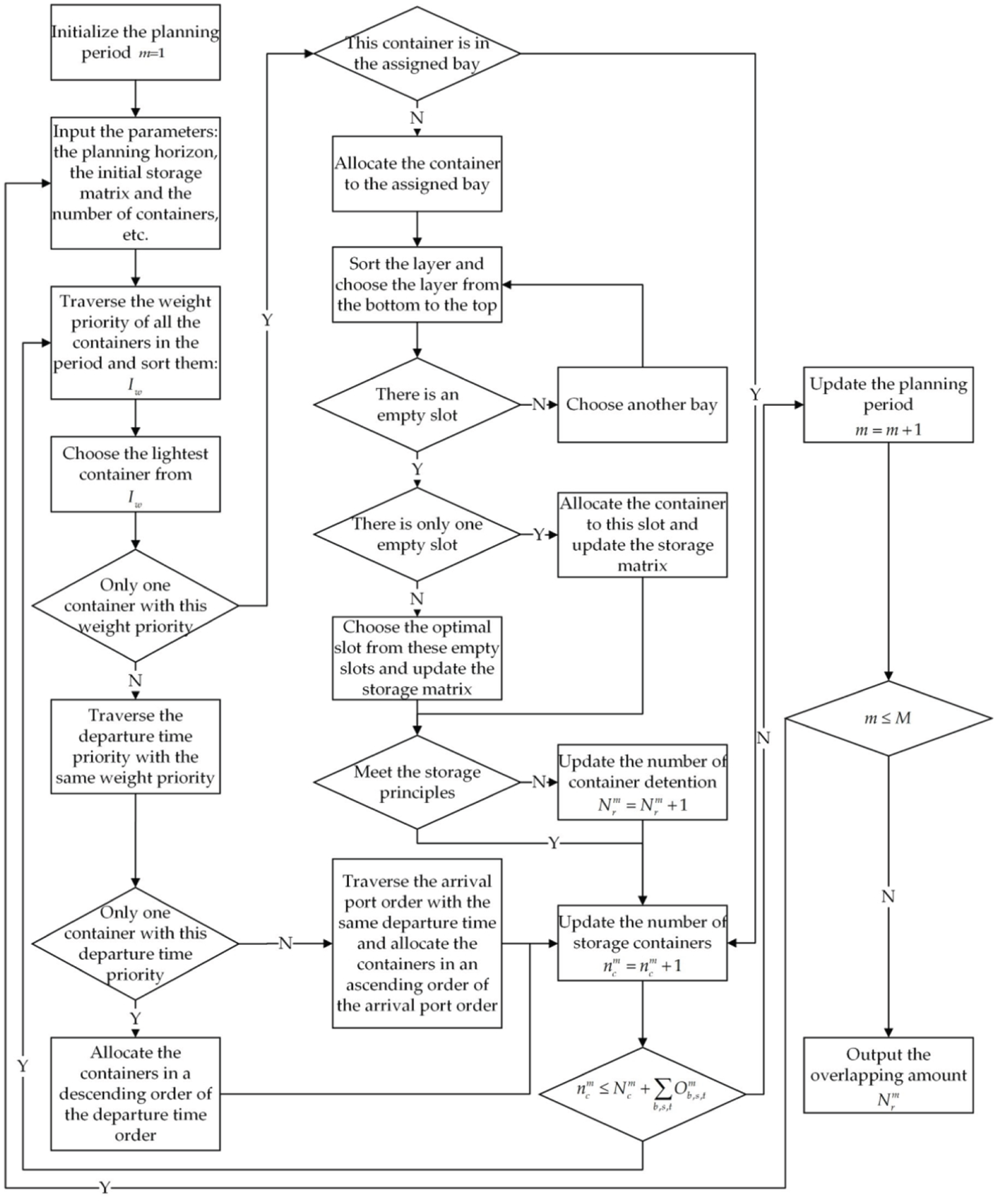
Flowchart of the heuristic algorithm based on the rolling horizon approach.
The procedure of HA
The notations used in the description of the procedure and the detailed description of the procedure are as follows:
Step 1. Input the planning horizon
Step 2. Input the initial storage matrix
Step 3. According to the first storage principle, traverse the weight priority of all the containers from the containers left from earlier planning horizons and the new arrival containers during the period
Step 4. Choose the lightest container
Step 5. If there is more than one container
Step 6. Sort the layers in the selected bay:
Step 7. Check whether there is an empty slot in the layer
Step 8. If there is only one empty slot, then allocate this container to this slot, update the storage matrix
Step 9. Select the best slot from these empty slots. Compare the overlapping amount before allocating this container
Step 10. Update the layer
Step 11. Traverse the departure time priority with the same weight priority and sort them:
Step 12. Traverse the arrival port order with the same departure time priority and sort them:
Step 13. Update the total number of containers
Step 14. If the new container and its lower layer containers satisfy the storage principles, then go to Step 13; otherwise, update the overlapping amount
Step 15. Update the planning period
Step 16. Storage task ends. Output the overlapping amount
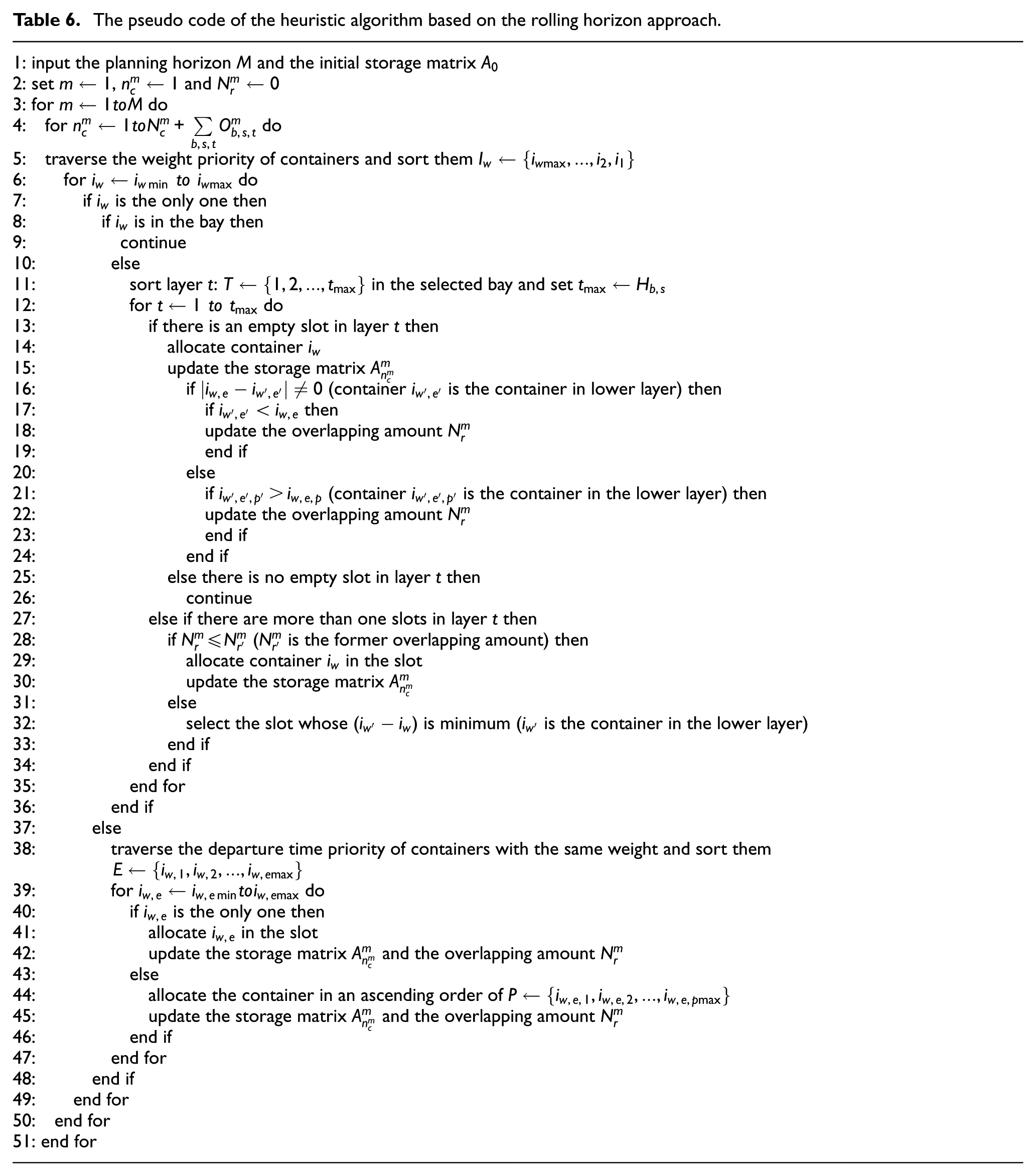
The pseudo code of the HA
The pseudo code of HA is shown in Appendix 1.
Case study
In this section, three groups of computational experiments are implemented to verify the proposed model and algorithm. The data we used in all these computational experiments came from the survey data of one of China famous railway container terminals. All the computational experiments are conducted based on a personal computer with Intel Core i5-2520M at 2.50 GHz processors and 4GB RAM.
Although in this paper, the scheduling of RMGCs is not considered, they usually travel on the same track and cannot cross each other. Therefore, to guarantee the safety and feasibility of storage operations, we regulate that RMGCs store and handle containers in a fixed region of the railway container yard so that RMGCs can store containers simultaneously without affecting each other. Consequently, each RMGC is responsible for the assigned bays; for example, if there are 3 RMGCs in the railway container yard, then each RMGC takes charge of about 20 bays.
In all the following experiments, we set 3 days as a planning horizon, 1 day as a planning epoch and 6 h as a planning period. There are 4 planning periods in one planning epoch and 12 planning periods in one planning horizon. Meanwhile each bay has 4 stacks and 4 layers. As is mentioned in section ‘Storage principles and overlapping amount’, when there are 4-layer containers in the bays, it is essential for the bays to have 3 empty slots. So, one bay can only store 13 containers.
First, to verify the feasibility of the model and algorithm, a medium-sized sample of 3 days with 72 containers left from earlier planning horizons and 180 new arrival containers is carried out. Meanwhile, the 180 new arrival containers are also divided into four groups. The first group of 50 containers arrives in the period
Here, we introduce the overlapping rate

According to the proposed HA, the overlapping amounts and overlapping rates during one planning horizon are shown in Table 2.
The overlapping amounts and the overlapping rates in each planning period.
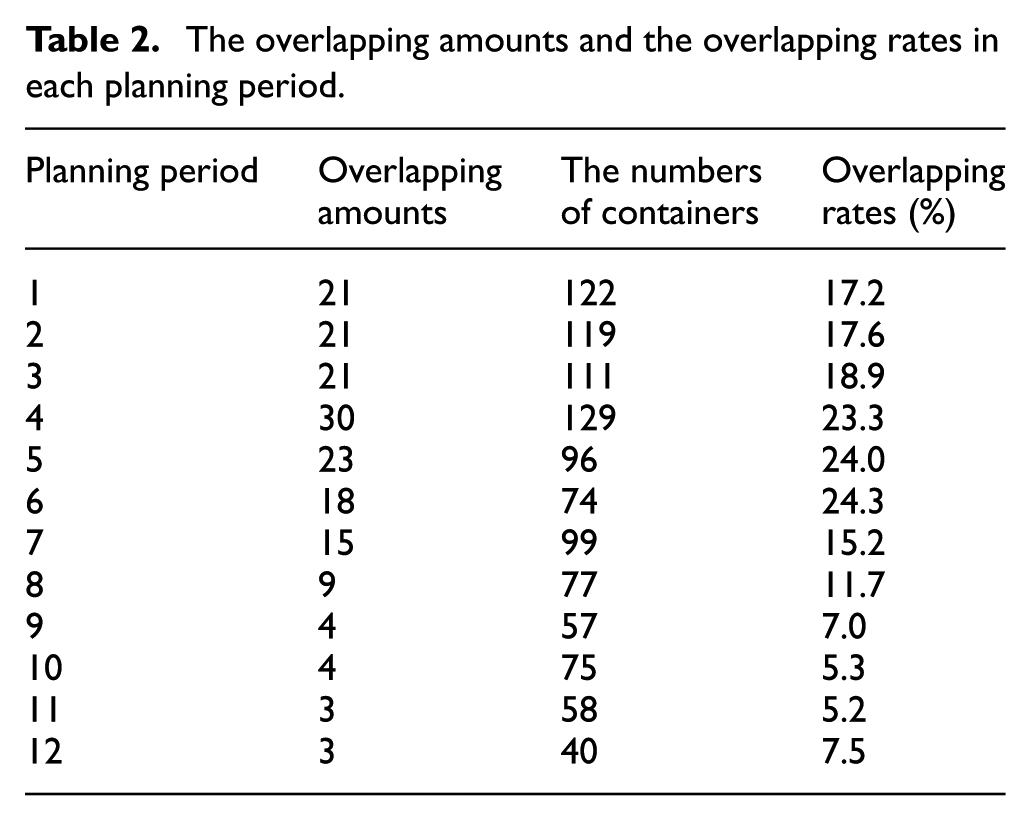
As observed in Table 2, the overlapping rates are all lower than 25%, and the average overlapping rate is 14.8%. So, HA can obtain good storage effect.
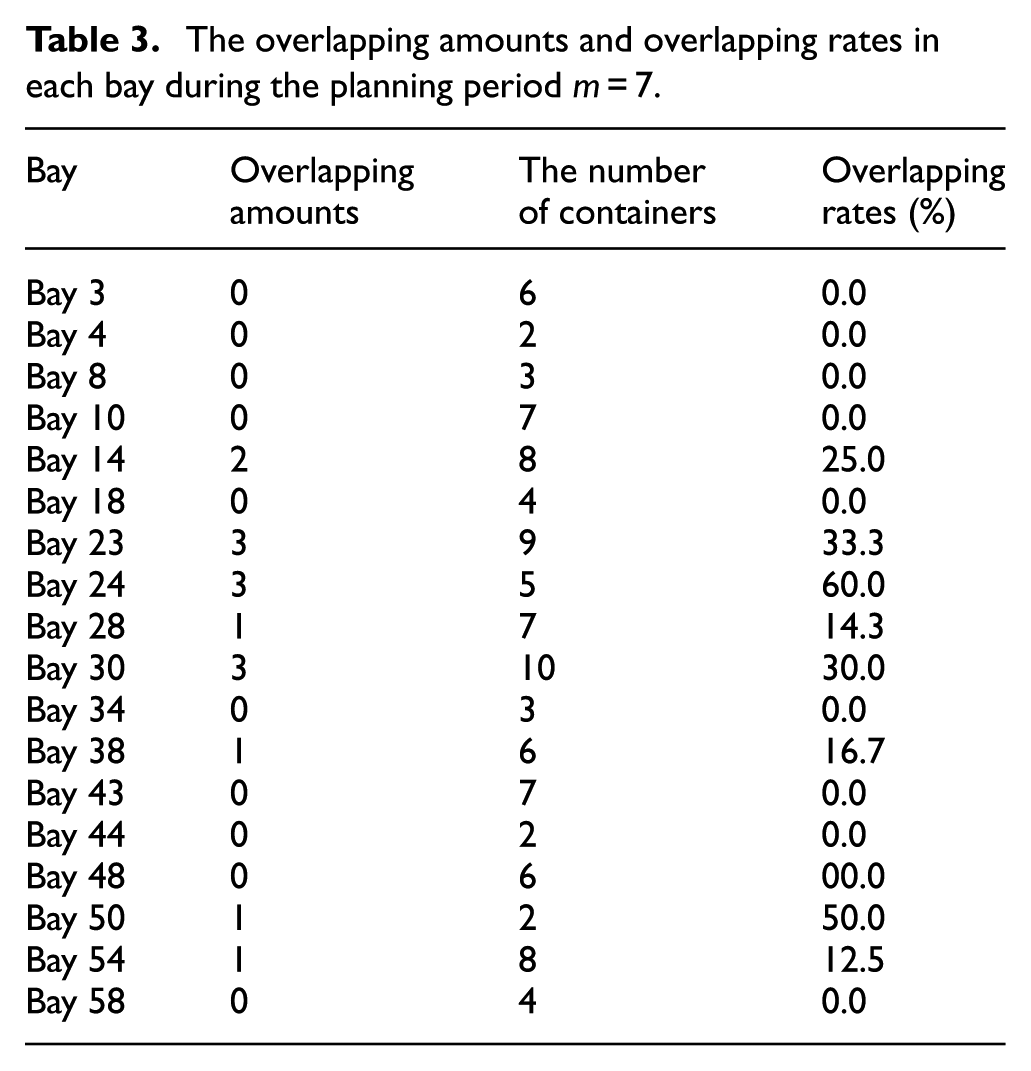
Take the planning period
The overlapping amounts and overlapping rates in each bay during the planning period
The container storage state in bay 43 (the overlapping amount is 0).
The container storage state in bay 48 (the overlapping amount is 0).
The container storage state in bay 54 (the overlapping amount is 1).
To illustrate the performance of the proposed model and algorithm, an experiment is implemented between the proposed algorithm and the regular allocation approach (RAA). RAA is to allocate the containers to the empty slots of the bay one by one according to containers’ arrival time and the arrival order of each container.
In this experiment, another medium-sized sample of 4 days with 81 containers left from earlier planning horizons and 279 new arrival containers is introduced. Meanwhile, the 279 new arrival containers are also divided into 6 groups. The first group of 50 containers arrives in the period
We introduce the value

The results of the experiment are shown in Table 4 and Figure 12.
The results of the experiment between HA and RAA.
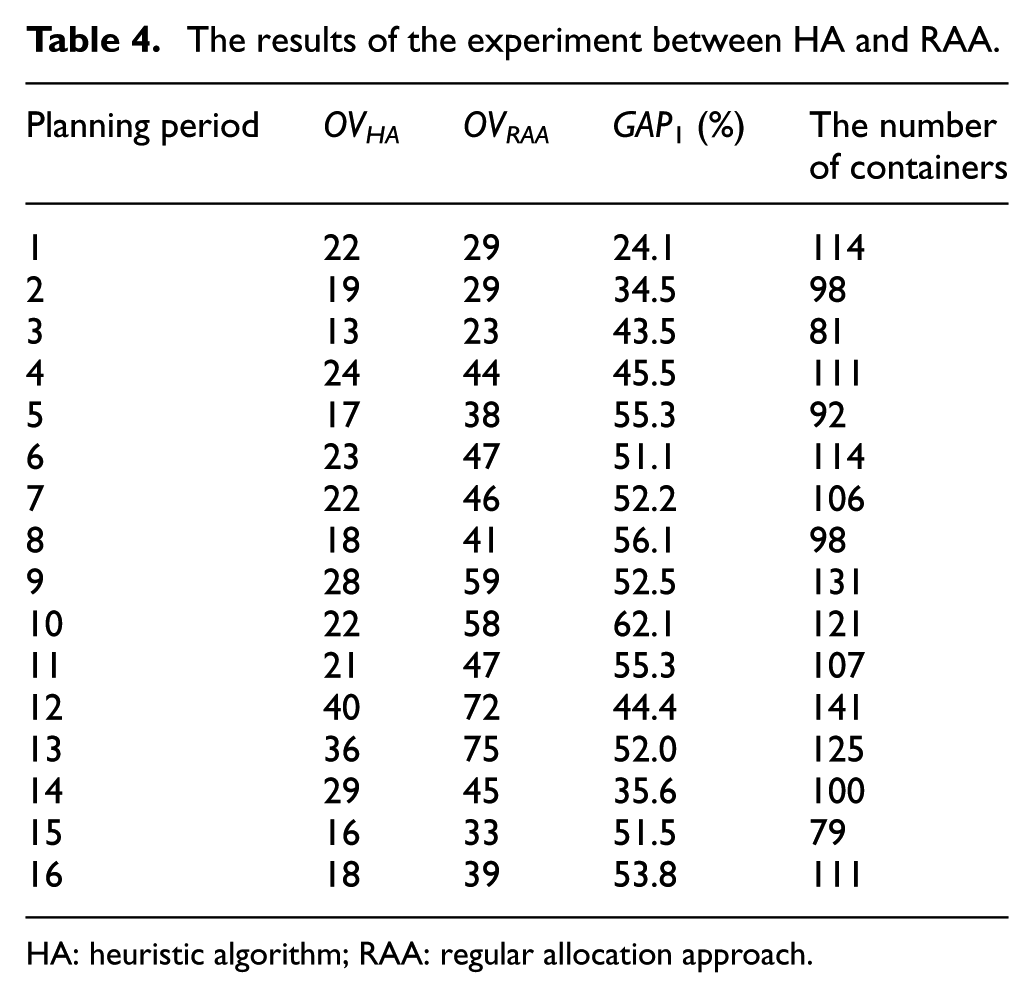
HA: heuristic algorithm; RAA: regular allocation approach.
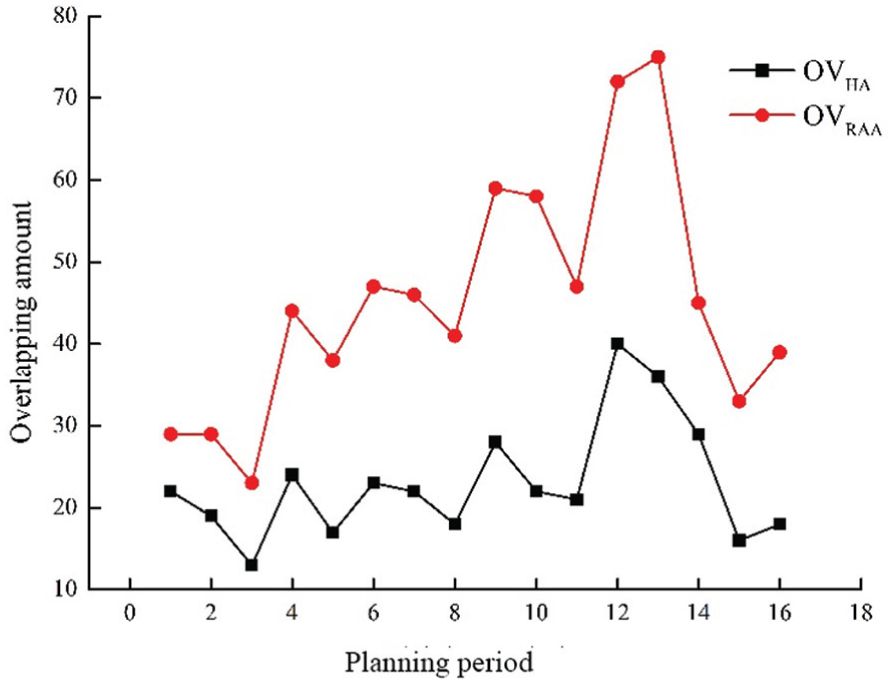
The overlapping amount between HA and RAA.
As shown in Figure 12 and Table 4, when there are some new arrival containers during the planning period, both
As a result, the proposed algorithm performs better in reducing the overlapping amounts when storing containers.
In section ‘The procedure of HA’, we only take the weight priority as an example to describe the proposed algorithm. Therefore, to determine which storage principle is the most important factor, another experiment between the weight priority and departure time priority is implemented based on the data from the second experiment. To evaluate the performance of the comparative experiments, the value

The results of the experiment between HA and RAA.
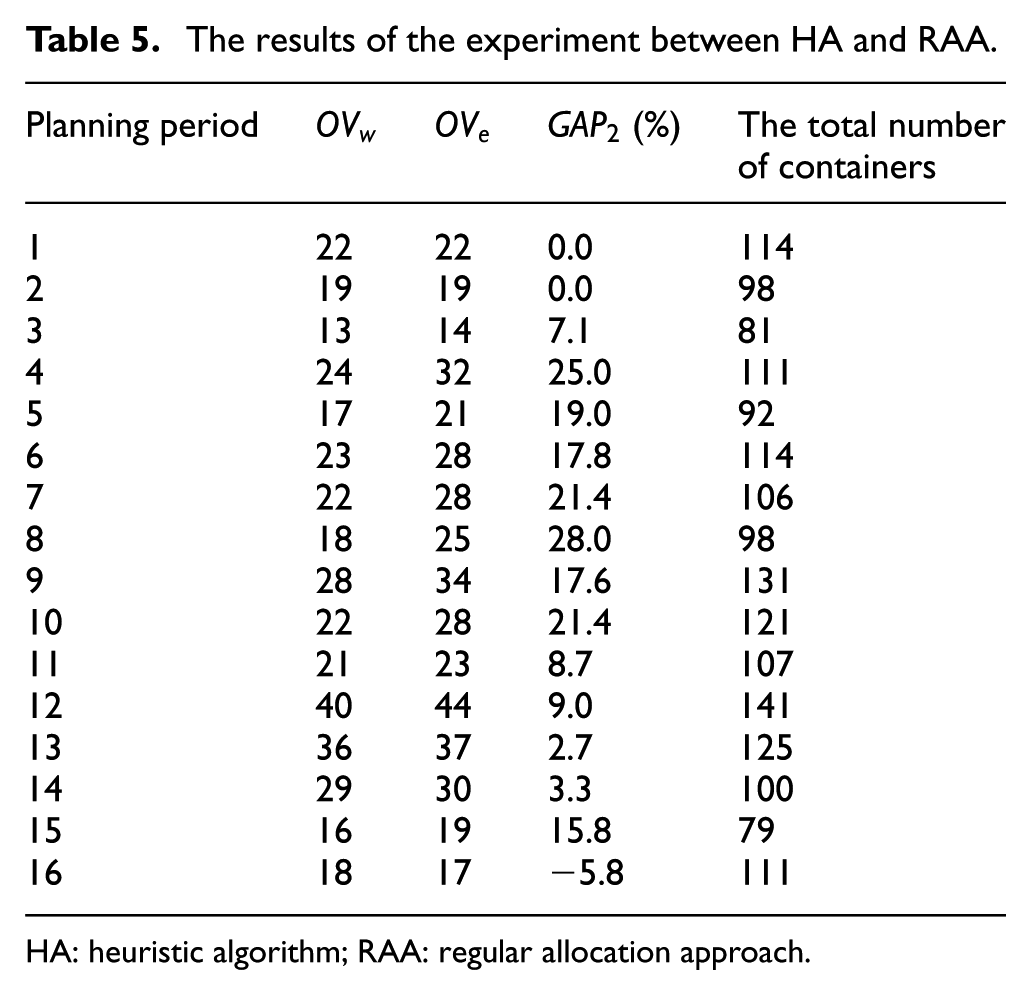
HA: heuristic algorithm; RAA: regular allocation approach.
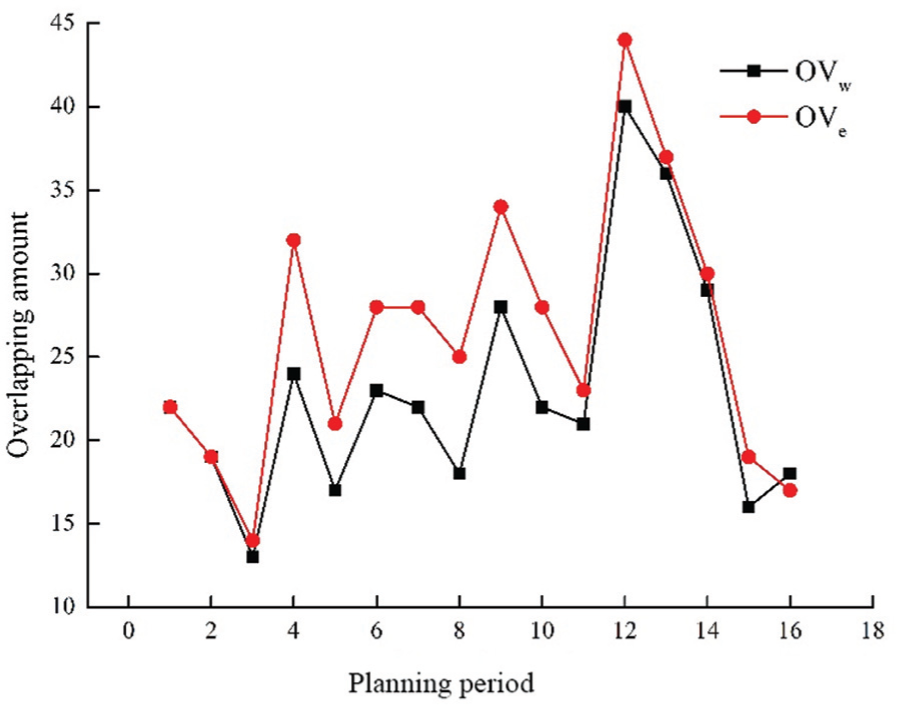
The overlapping amount between the weight priority and departure time priority.
It can be obviously found from Table 5 and Figure 13 that
Conclusion
In this paper, we focus on the outbound container slot allocation problem in rail–water intermodal container terminals considering the stowage plan, departure time priority and containers left from earlier planning horizons. Then, a mathematical model based on the rolling horizon planning is proposed to minimize the total overlapping amounts. Since the rolling planning horizon is also considered, a novel HA based on the rolling horizon approach is introduced to solve the proposed problem effectively.
Three groups of computational experiments are conducted. The results of the first experiment showed that overlapping rates are all lower than 25.0%. Meanwhile, the results of the second experiment that compare the proposed method with the RAA verify that the proposed method performs better in both storage states and computational time. In addition, we also determine that the weight priority is the most important factor that influences container storage state by the third experiments.
In future, we will consider inbound and outbound containers together. Another research direction is to consider some uncertain factors, such as uncertain arrival time of containers, and combine railway containers with road containers together in the same model.
Footnotes
Appendix 1
The pseudo code of the heuristic algorithm based on the rolling horizon approach.
| 1: input the planning horizon and the initial storage matrix |
| 2: set , and |
| 3: for do |
| 4: for do |
| 5: traverse the weight priority of containers and sort them |
| 6: for do |
| 7: if is the only one then |
| 8: if is in the bay then |
| 9: continue |
| 10: else |
| 11: sort layer : in the selected bay and set |
| 12: for do |
| 13: if there is an empty slot in layer then |
| 14: allocate container |
| 15: update the storage matrix |
| 16: if (container is the container in lower layer) then |
| 17: if then |
| 18: update the overlapping amount |
| 19: end if |
| 20: else |
| 21: if (container is the container in the lower layer) then |
| 22: update the overlapping amount |
| 23: end if |
| 24: end if |
| 25: else there is no empty slot in layer then |
| 26: continue |
| 27: else if there are more than one slots in layer then |
| 28: if ( is the former overlapping amount) then |
| 29: allocate container in the slot |
| 30: update the storage matrix |
| 31: else |
| 32: select the slot whose is minimum ( is the container in the lower layer) |
| 33: end if |
| 34: end if |
| 35: end for |
| 36: end if |
| 37: else |
| 38: traverse the departure time priority of containers with the same weight and sort them |
| 39: for do |
| 40: if is the only one then |
| 41: allocate in the slot |
| 42: update the storage matrix and the overlapping amount |
| 43: else |
| 44: allocate the container in an ascending order of |
| 45: update the storage matrix and the overlapping amount |
| 46: end if |
| 47: end for |
| 48: end if |
| 49: end for |
| 50: end for |
| 51: end for |
Appendix 2
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
This work was supported by the Fundamental Research Funds for the Central Universities (grant number 2018YJS080), the Major Research Plan of the National Natural Science Foundation of China (grant number 71390332) and the National Key R&D Programme of China (grant number 2018YFB1201403).