
Abstract
In order to derive the feasible control law of the constrained model predictive control scheme, quadratic programming has been introduced as an effective method. It is known that the typical performance index for model predictive control strategies under various constraints can be converted into a standard quadratic programming problem; however, there may be no feasible solutions for the corresponding quadratic programming problem when the working conditions are too bad or constraints are too rigorous, the real-time control law cannot be updated and the system performance may be deteriorated. To cope with such problems, an improved quadratic programming problem in which relaxations are employed to increase the possibility of successful solutions is proposed for the constrained dynamic matrix control approach in this paper. By adopting the introduced relaxations, more degrees of relaxations are provided for the optimization process under the case of over-constrained, such that the control law is easier to yield. Case study on the temperature regulation of the coke furnace demonstrates the validity of the improved quadratic programming structure–based dynamic matrix control strategy. Simulation results show that the proposed scheme yields improved control performance.
Keywords
Introduction
Constraints exist widely due to the actual working conditions, the limitation of the actuators and so on in practice, and considering the relevant constraints during the controller design is necessary and meaningful.1–4 When the process is over-constrained, there may be no feasible solutions for the corresponding controller. Under such situation, it is common practice to adopt the actuator immobility, that is, the control action will be the same as the previous sampling instant. It is obvious that the adopted control action may not be the optimal, and the system performance may deteriorate. 5
Model predictive control (MPC) strategies have been applied to various industries successfully, and constraints handling are the common problems during the MPC design.6,7 To obtain the optimal control law of the MPC approaches, many effective methods are studied.8–11
The development of linear programming (LP) scheme in dealing with the constraints has acquired lots of progresses, and many representative results are put forward. Deng et al. 12 used the mixed-integer LP to cope with the operation constraints in the experimental microgrid. LP and MPC were combined to deal with the input constraints in processes by Lee and Kouvaritakis. 13 To improve the computational burden of MPC under constraints, LP was adopted by Rao and Rawlings, 14 and Borrelli et al. 15 developed a new method that has computational advantages for the LP problem in MPC schemes. Ferrari-Trecate et al., 16 introduced the exploiting hybrid systems to complete the optimization of a cycle power plant. The MPC based on LP for positive systems is addressed by Zhang et al. 17
In robust MPC strategies, using the linear matrix inequalities (LMIs) is a common practice to process the constraints, and many researchers put forward their significant viewpoints. Kothare et al. 18 simplified minimizing of the objective function under constraints as the solving of LMIs. Based on the LMIs, robust MPC was addressed for the system under disturbances and constraints by Ding et al., 19 and Calafiore and Fagiano 20 presented a novel robust MPC approach based on the iterated solution for constrained linear systems. On the basis of piecewise quadratic Lyapunov functions, robust constrained MPC strategy was put forward for the fluidized bed combustion plant by Zhang et al. 21 Li et al. 22 first proposed the constrained model for train traffic and then the robust MPC scheme was employed for the train regulation. Improved robust min–max MPC strategies for both unconstrained and constrained cases were developed by Zhang et al.23,24
Besides the aforementioned methods, adopting quadratic programming (QP) algorithm is also a popular practice in handling with the constraints.25,26 It is obvious that the objective function under various constraints of MPC strategy can be converted into a standard QP problem, such that much attention was drawn to relevant studies. Bemporad and Filippi 27 discussed the way to find the approximate solution of multiparametric QP. The MPC scheme using online QP algorithm was developed and implemented on the inexpensive hardware by Wills et al. 28 The fuzzy model was linearized, and the MPC strategy was proposed for the continuous stirred tank reactor by Mollov et al. 29 Li et al. 30 adopted the improved quadratic cost function in the MPC approach for the adaptive cruise control system. The trust-region feasibility-perturbed sequential QP algorithm was introduced to cope with the problems in nonlinear MPC by Tenny et al. 31 An output feedback MPC was proposed for learning-based predictive control (LPC) systems by Ping et al. 32 Other researchers also addressed their vital fruits.33–37
For the conventional QP-based MPC strategies, there will be no feasible solutions if the constraints are too rigorous, which will deteriorate the relevant system performance. How to guarantee the acquisition of optimal control law under various working conditions is still an open issue.
To handle such problem, an improved QP algorithm is proposed. By using the novel QP algorithm in which relaxations are employed to reconstruct the relevant cost function and constraints, the possibility of successful solving for real-time optimal control laws for the constrained MPC approaches is increased. The temperature process in the coke furnace demonstrates the effectiveness of the proposed constrained dynamic matrix control (DMC) scheme.
This paper is organized as follows. Section “Coke furnace” gives the whole process flow of the coke furnace. The conventional QP-based DMC strategy is presented in section “Conventional constrained DMC.” In section “Proposed constrained DMC,” the improved QP-based DMC scheme is addressed. The case study is discussed in section “Case study,” and section “Conclusion” summarizes this paper.
Coke furnace
Whole process flow
Coke furnace has been extensively studied in previous research. 38 The total process flow is given vividly in Figure 1. First, the residual oil goes into the coke furnace, then it will be divided into two branches (FRC8103 and FRC8104) and goes to the convention room to be heated to about 330°C. After this, the heated residual oil will mix together and be sent to the fractionating tower (T102) to exchange heat with the gas oil that comes from coke tower (T101/5,6). When the heat exchanging process is completed, the gas oil and the heavy part of the residual oil will join together. Then the mixture will be separated into two branches (FRC8107 and FRC8108) and heated to about 495°C in the radiation room. Finally, the mixture will go into the coke tower (T101/5, 6) for coke removing.
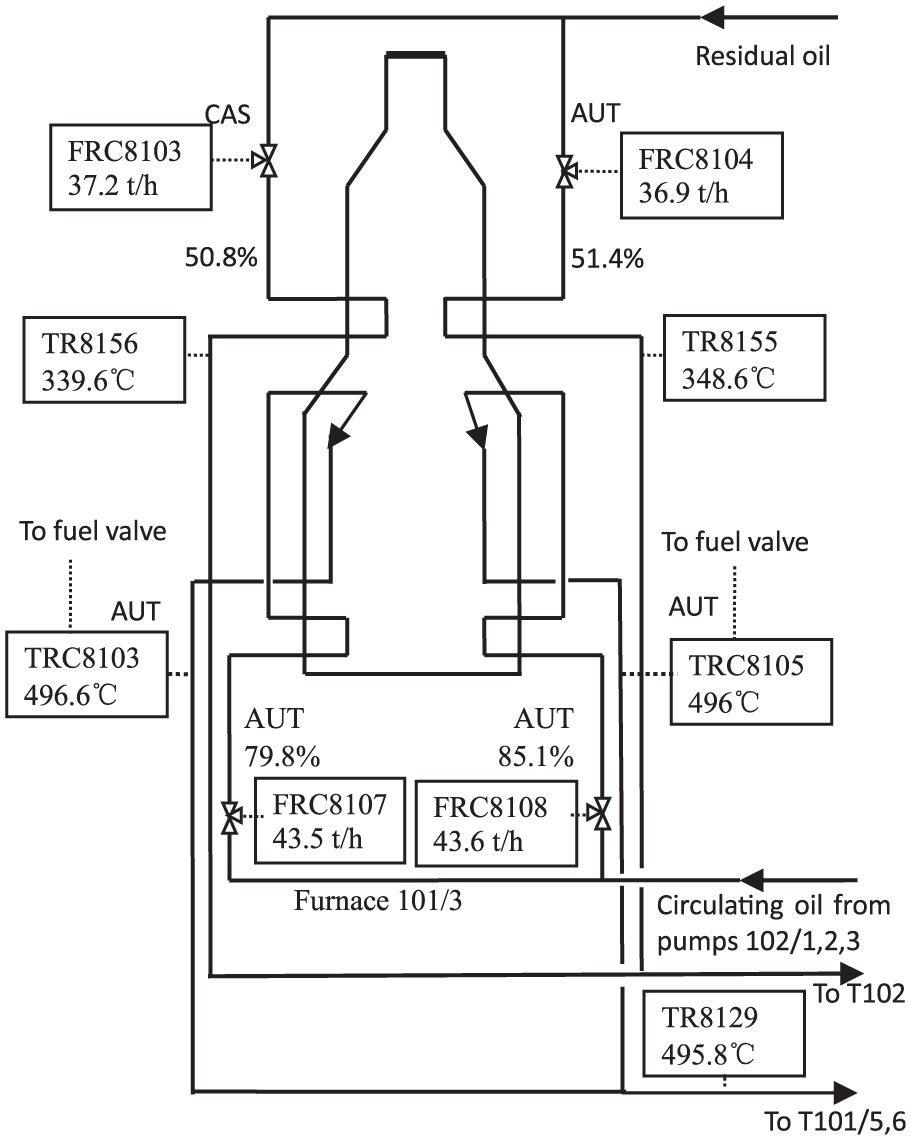
Process flow of coke furnace (F101/3).
The temperature regulation process
The outlet temperature of the radiation room needs to be regulated at the set-point to ensure secure and efficient operation. Meanwhile, constraints are also the factors that should be considered. Note that the working conditions are unknown and uncontrollable, the constraints may be excessive, which makes it difficult for the relevant controller to acquire the real-time optimal control law. Moreover, the process dynamics possess uncertainty, and it is difficult to build an accurate model. 39 The controller design is aimed at controlling the outlet temperature at the set-point under various uncertainties and constraints.
Conventional constrained DMC
To simplify the derivation process, the following single-input single-output (SISO) transfer function model is considered

where
Based on equation (1), we can obtain the model vector
The corresponding dynamic matrix is generated as follows
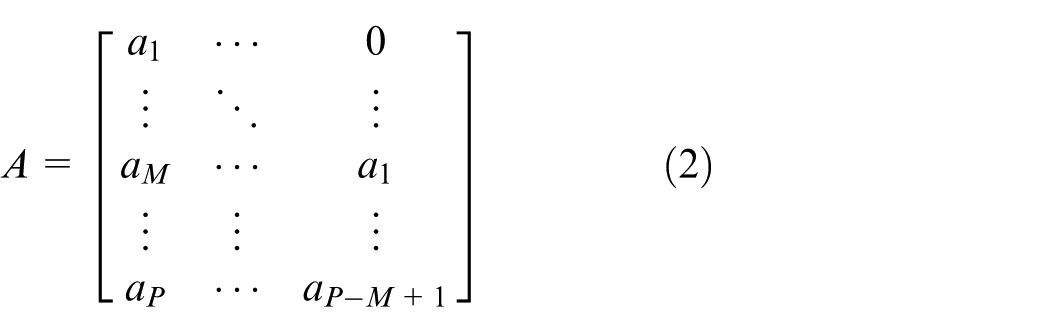
where P is the prediction horizon, M is the control horizon and A is dynamic matrix with dimension of
At time instant

where

Note that there are prediction error caused by the model/plant mismatch or other uncertainties, thus we need to correct the future output prediction as follows

where
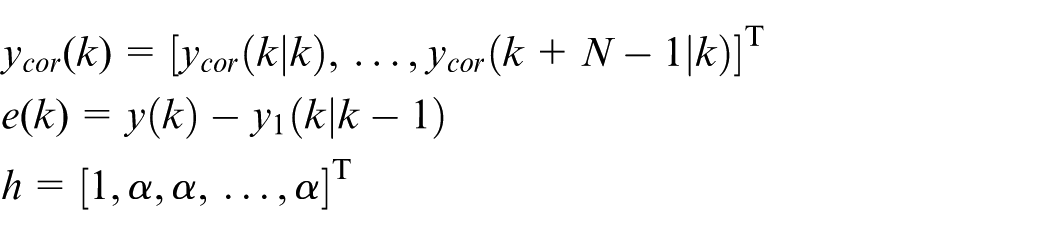
At time instant k, the initial output prediction

where is the shifting matrix, and
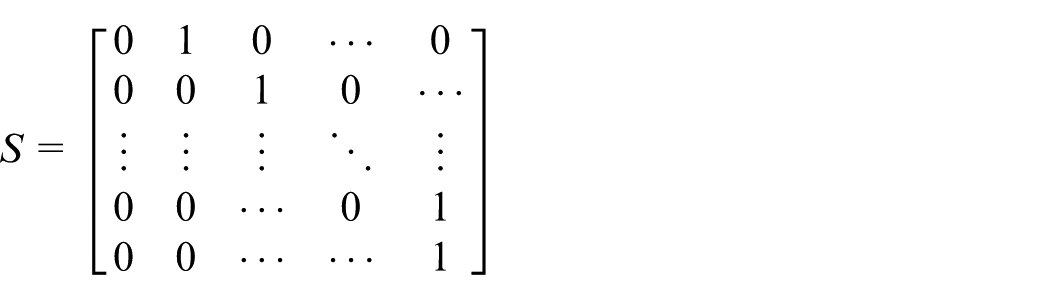
It is obvious that the last item of
Then the future output prediction under

where

In order to let the output prediction track the set-point as closely as possible, the objective function of the conventional constrained DMC strategy is selected here as

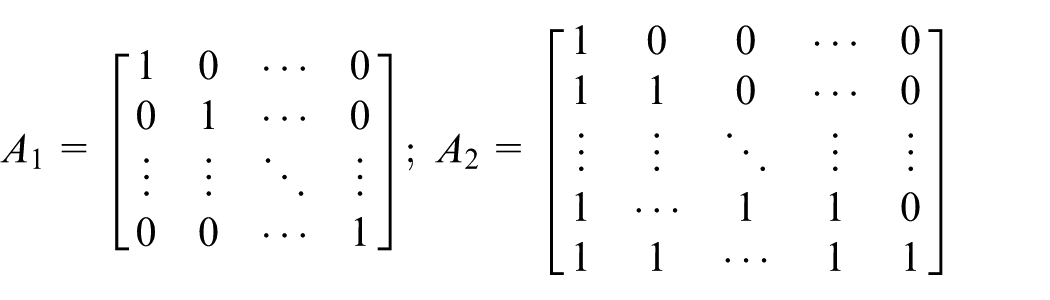
subject to

where

Here
By decomposing equation (7), the following formula is acquired first
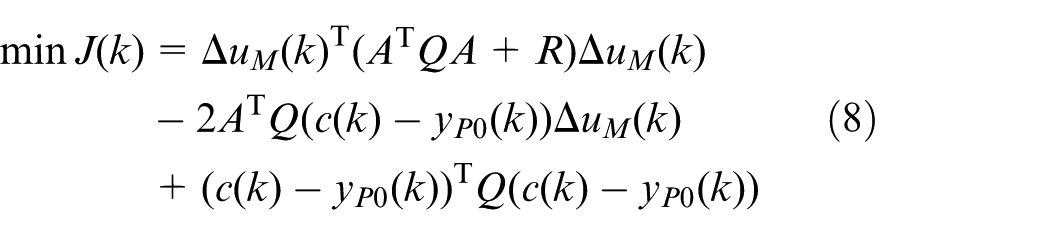
subject to

Note that the known part of the objective function in equation (8) can be omitted, then the following QP problem is derived

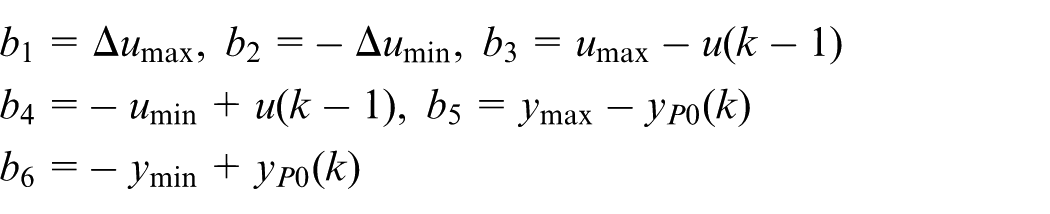
subject to

where



Finally, the real-time optimal control law can be obtained by solving the QP problem in equation (9).
Remark 1
When the QP problem in equation (9) is over constrained, there will be no feasible solutions, which may deteriorate the system performance.
Proposed constrained DMC
Based on the derivation process of the conventional constrained DMC scheme, equations (1)–(7) can be obtained first.
In order to avoid the situation that the QP problem may be unsolvable, we introduce the relaxations to reconstruct the QP problem.
The hard constraints are unchangeable, here the relaxations are applied to the output constraints, and the details are
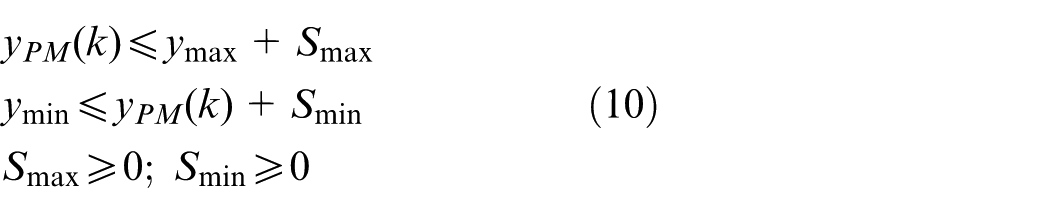
where

Remark 2
It is obvious that if
Using the improved output constraints, the objective function in equation (7) is rewritten as

subject to
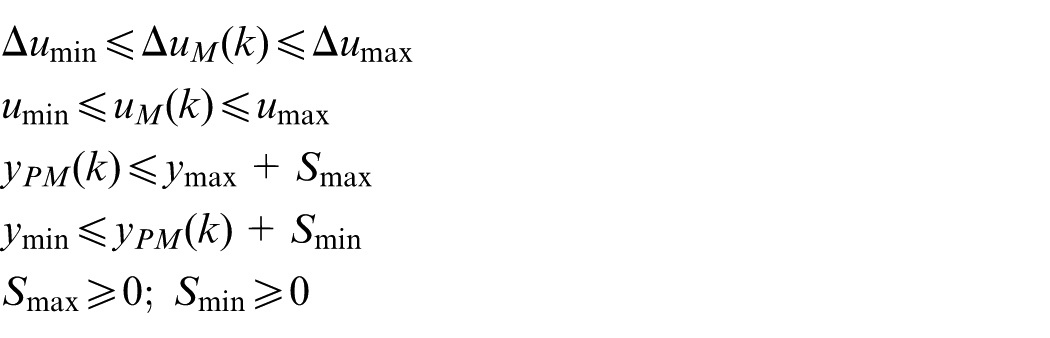
where
Remark 3
From equation (11), we can easily find that the solutions of the improved cost function will be the same as the traditional cost function in equation (7) if the constraints are loose. When the constraints are too rigorous, there may be real-time optimal solutions for the improved cost function by the effect of these relaxations. The optimal solutions with the smallest constraint violation may be given under these over-constrained situations.
Remark 4
In a sense, the objective function in equation (11) is equivalent to equation (7) if the weighting matrices
Then the corresponding QP problem based on equation (11) is

subject to

where
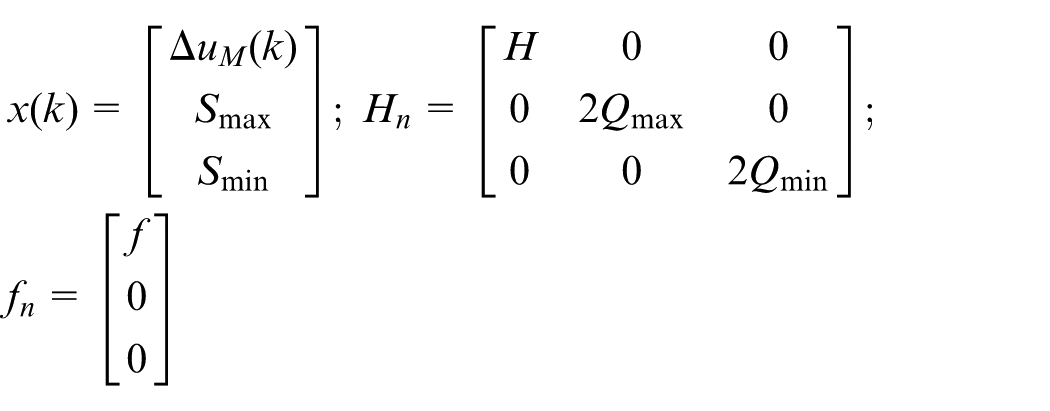
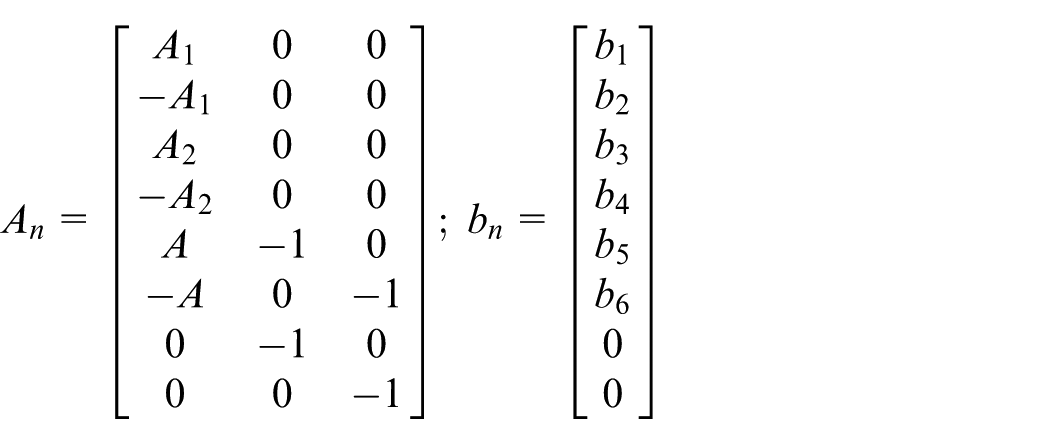
The elements in the above matrices are the same as equation (9). Meanwhile,
The optimal control of the proposed constrained DMC strategy can be acquired by solving the improved QP problem in equation (12) definitively.
Case study
Based on real-time operation data and step-response test shown by Lee, 37 the outlet temperature process of the coke furnace is modeled as
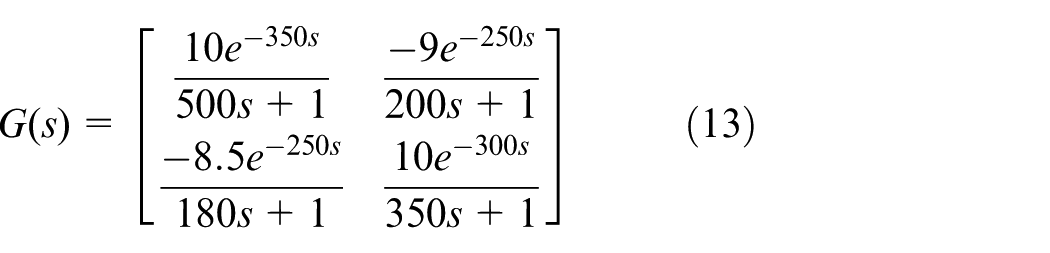
In this section, the conventional QP-based constrained DMC scheme is introduced as the comparison to test the effectiveness of the proposed method. Meanwhile, three cases under model/plant mismatch and various constraints are also introduced to evaluate the control performance of both strategies further.
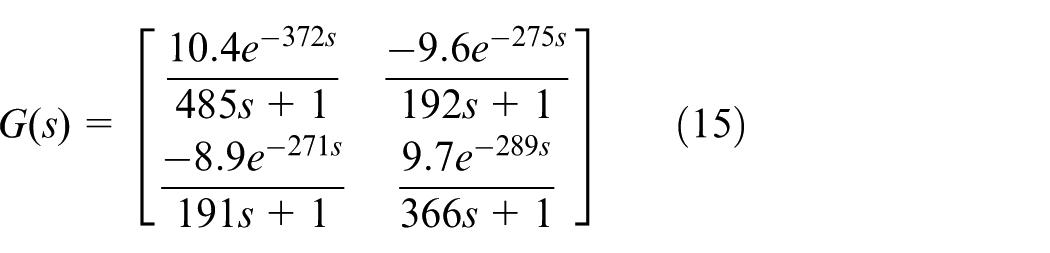
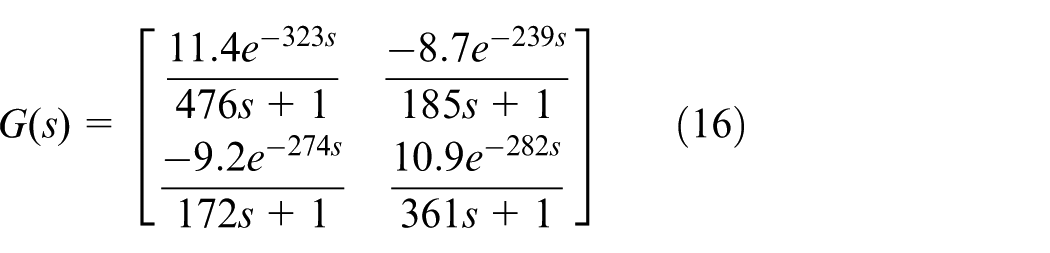
By using the Monte Carlo simulation, three model/plant mismatched cases are generated.
Case 1
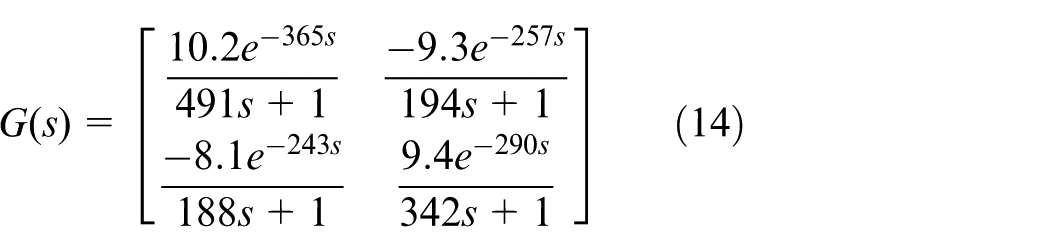
Case 2
Case 3
The constraints for these cases are selected as
Case 1
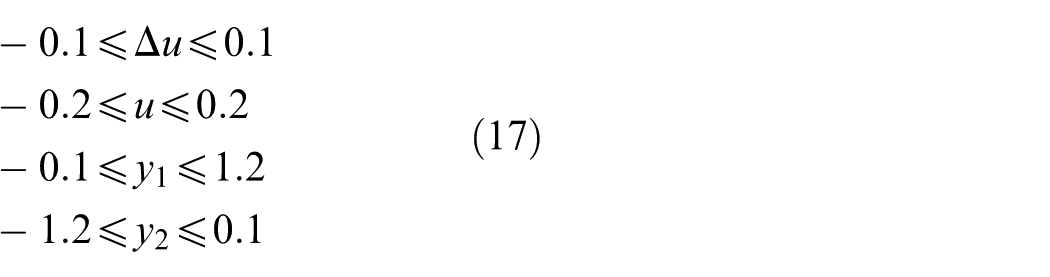
Case 2
Case 3
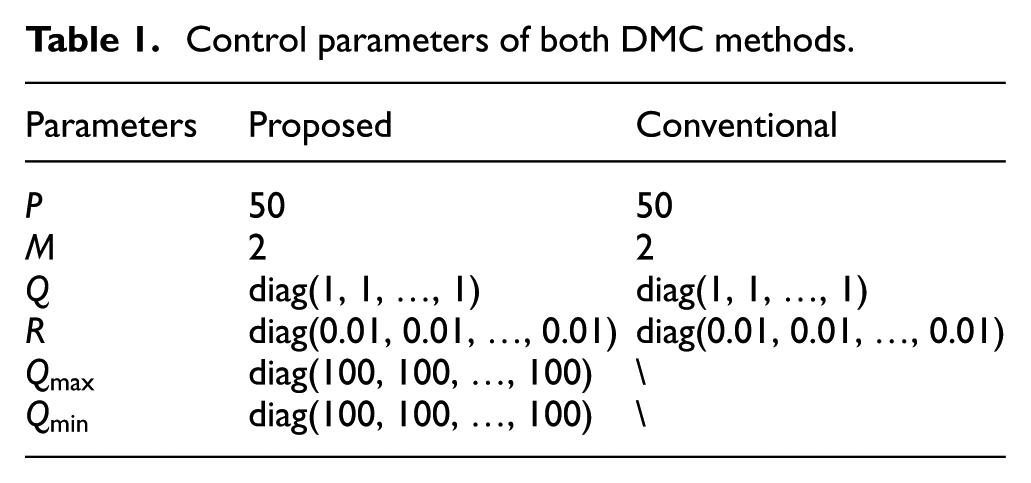
The sampling time is chosen as 100 s. For both methods, the set-points for the two outputs are 1 and −1, and the model length N is 80. The control parameters of both constrained DMC strategies are listed in Table 1, and the corresponding tuning rules can refer to Reverter et al. 40 and Klopot et al. 41
Control parameters of both DMC methods.
The responses of the two strategies under case 1 are shown in Figure 2(a)–(c). In case 1, the degrees of the model/plant mismatch and the constraints are both small. It is obvious that their responses are the same. It also proves that the improved QP problem is equivalent to the conventional QP problem under good working conditions.
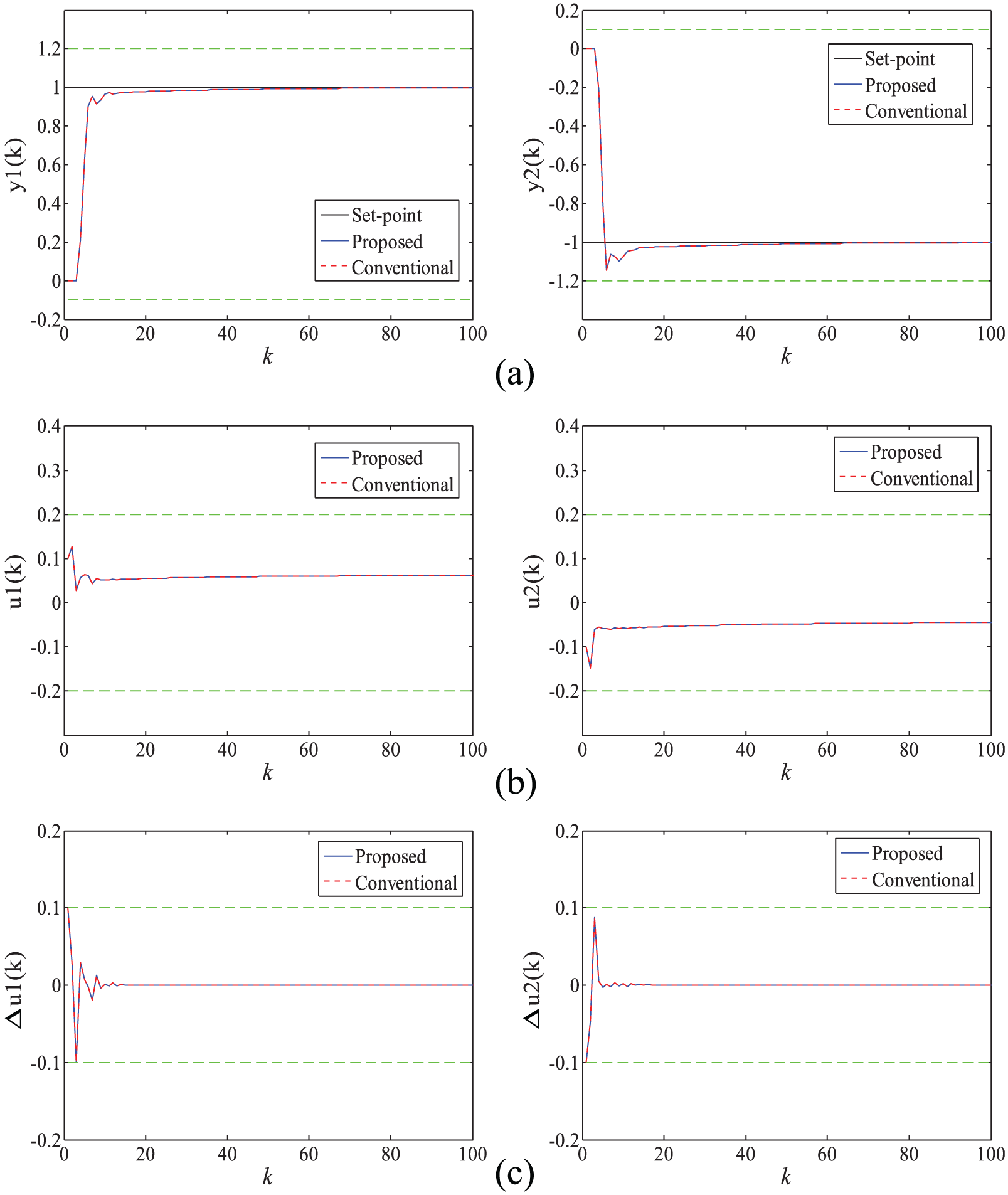
(a) Output responses under case 1, (b) input signals under case 1 and (c) input increment signals under case 1.
Figure 3(a)–(c) shows the responses under case 2. In case 2, the degree of model/plant mismatch is bigger than that of case 1, and the constraints are the same. From an overall perspective, the ensemble control performance of the proposed constrained DMC scheme is better. In Figure 3(a), it is clear that both methods show acceptable control performance; however, the overshoot and the oscillations of the output for the conventional strategy are significant. From Figure 3(b) and (c), we can see that the responses of the input and the incremental input for the proposed scheme are smoother, which also implies the enhanced control performance of the proposed approach further. The responses under case 2 implies that these relaxations start to take effect for the proposed strategy when encountering the rigorous conditions. With these relaxations, proper solution for the corresponding QP problem is obtained. However, the conventional method may face more and stricter limitations.
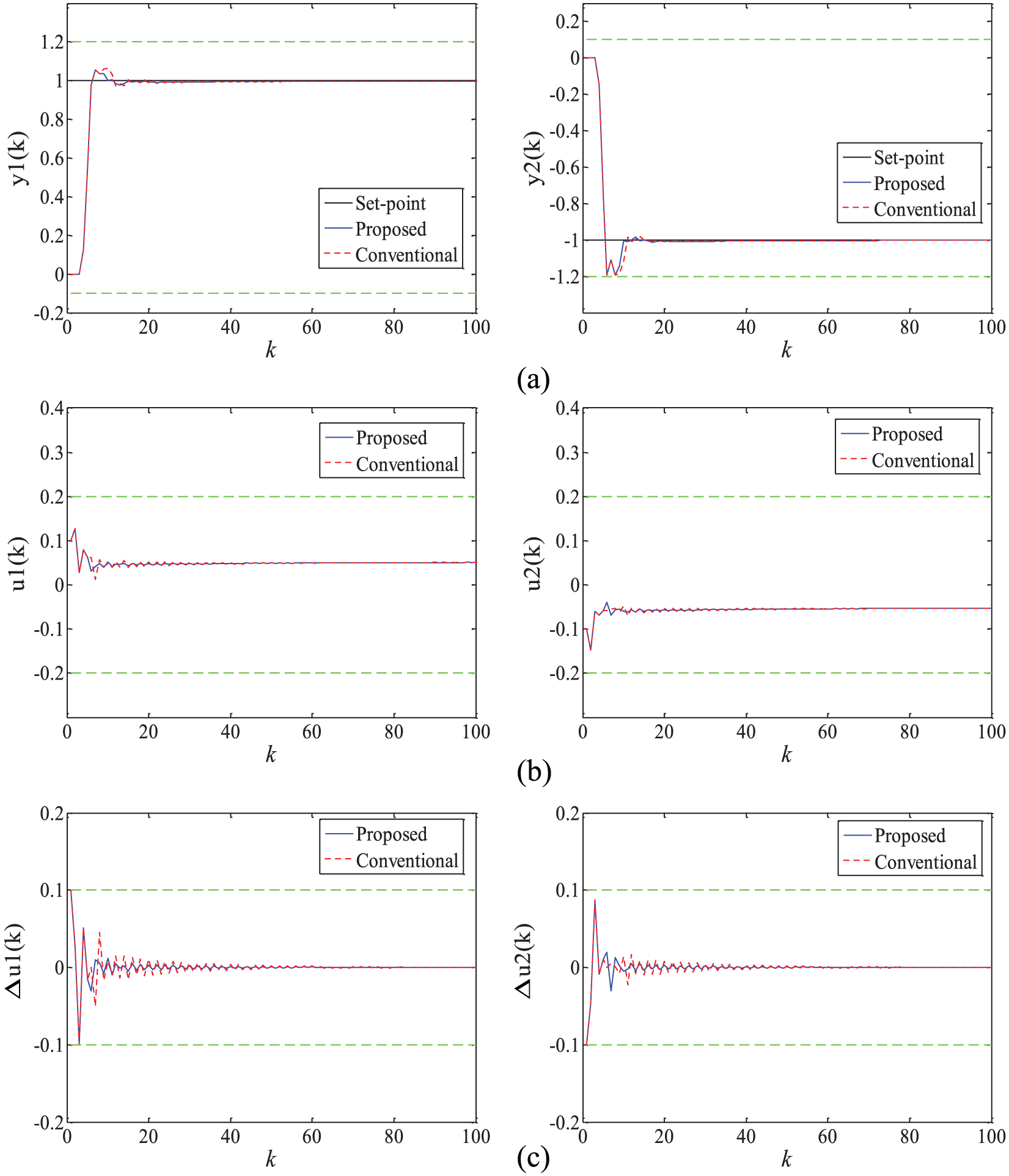
(a) Output responses under case 2, (b) input signals under case 2 and (c) input increment signals under case 2.
Figure 4(a)–(c) shows the responses of two DMC schemes under case 3. In case 3, the degree of model/plant mismatch is also bigger than that of case 1, and the constraints are stricter. Here, the conventional constrained DMC strategy is unsolvable, and its responses are omitted. It is obvious that the proposed approach still provides real-time optimal solutions with smaller constraint violation under the over-constrained situation, which proves the effectiveness of the proposed strategy further.
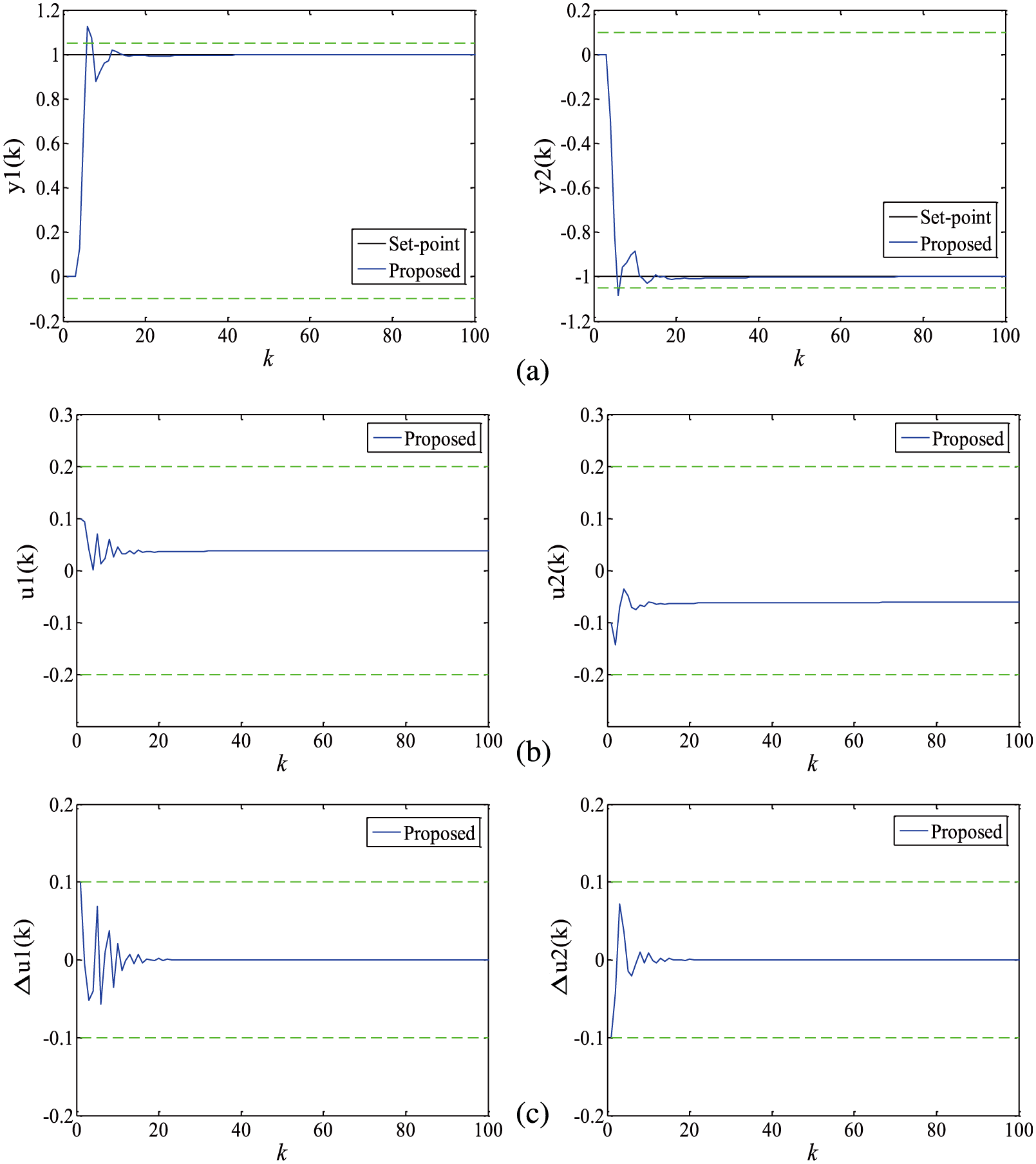
(a) Output responses under case 3, (b) input signals under case 3 and (c) input increment signals under case 3.
Conclusion
A modified QP-based constrained DMC strategy is developed for the constraint handling of the temperature control in a coke furnace under constraints and uncertainties. In order to increase the possibility of successful solving the constrained optimization problem, relaxations are introduced for the proposed method. By utilizing these relaxations, a novel QP problem, in which relaxations will take effect when encountering strict conditions, is constructed for the proposed approach, and proper solutions are anticipated finally. The case study on the temperature regulation in the coke furnace under various uncertainties and constraints demonstrates the validity of the proposed constrained DMC method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.