
Abstract
The principal target of this work is to introduce and examine a novel kind of complex synchronization. This sort may be called complex anti-synchronization. There are surprising properties of complex anti-synchronization that do not exist in the writing, for example, (1) this sort of synchronization can dissect just for complex nonlinear frameworks. (2) The complex anti-synchronization contains or connects two sorts of synchronizations (anti-synchronization and complete synchronization). Anti-synchronization happens between the real part of main framework and the imaginary part of the slave framework, although complete synchronization accomplishes between the real part of slave framework and the imaginary part of the main framework. (3) In complex anti-synchronization, the attractors of the essential and slave structures are moving symmetrical to each other with a similar structure. (4) The state variable of the standard framework synchronizes with an other state variable of the slave structure. An explanation of complex anti-synchronization is presented for two indistinguishable chaotic complex nonlinear frameworks. In view of the Lyapunov function, a plan is intended to accomplish complex anti-synchronization of disordered or chaotic attractors of these frameworks. The effectiveness of the obtained results is outlined by a reenactment illustration. Numerical outcomes are plotted to show state variable, modulus errors, phase errors and the development of the attractors of these chaotic frameworks after synchronization to demonstrate that complex anti-synchronization is accomplished.
Introduction
Nonlinear deterministic dynamical frameworks are pervasive in nature and are outstanding for their unusual property of delicate reliance on introductory conditions which offers ascend to their worldly unpredictability and obvious arbitrariness. This property for sure prompts a few intriguing qualities that have been examined for a long time in the fields of sciences, medicine and engineering, 1 electronics, 2 electric vehicles 3 and the investigation of nonlinear frameworks in arithmetic. 4 Specifically, clamorous elements, bifurcation structures, multistability of attractors, synchronization elements and numerous more have been thoroughly examined in endeavors to clarify and depict nonlinear practices and their potential applications. Synchronization which was initially proposed by Pecora and Carroll 5 is one of the most critical of nonlinear frameworks and has been considered as an incredible leap forward in the confused flow, 6 because of its potential applications in demonstrating cerebrum exercises, substance responses, and all the more significant in data handling and secure correspondence. 7 These anticipated applications have set off the tremendous research consideration given to anti-synchronization (AS) for more than three decades. Expanding enthusiasm for the investigation of synchronization of chaotic frameworks has prompted the disclosure of different strategies and sorts of synchronization. In ordering AS, we particularly specify here the first thought of identical complete synchronization,5,8 general chaos synchronization, 9 stage synchronization, 10 lag (or slack) synchronization, 11 generalized synchronization,12,13 projective synchronization,14–16 AS17,18 and work projective synchronization. 19 A vast number of past chips away at disarray synchronization have been gone for accomplishing synchronization between state factors of the principle frameworks and that of the comparable slave framework with real or complex factors.
There are some various types of synchronization which cannot be examined for authentic or genuine dynamical structures, for example, module-organize synchronization, 20 complex complete (or full) synchronization (CCS), 8 complex lag (or slack) synchronization (CLS), 21 complex anti-lag (or anti-slack) synchronization (CALS) 22 and involved changed or modified projective synchronization (CMPS). 23 These different kinds of synchronizations are investigated for muddled or confused complicated nonlinear systems. In a complex state, there are two basic sums phase (or stage) and module. Thus, the acts of the stage and module are mulled over in.20,22
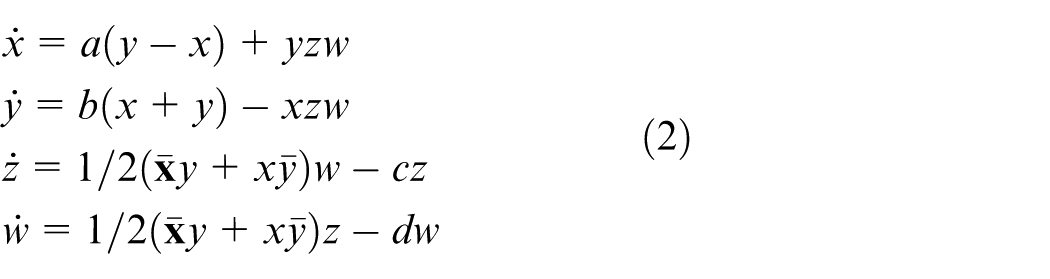
Hold the turbulent (or chaotic) complex nonlinear system with explicit or certain parameters as pursues

where
Comment 1
The most extraordinary of the turbulent complex systems can be depicted by equation (1), for instance, disordered complex Lorenz, Chen and Lü structures.24–26
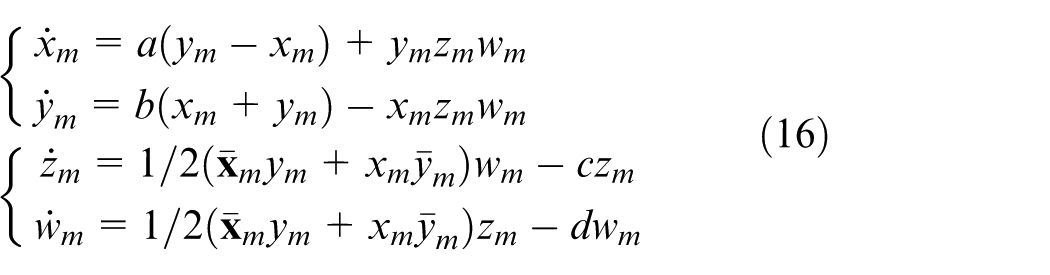
In this paper, we complete our investigation about complex anti-synchronization (CAS). In Mahmoud, 26 we study CAS with uncertain parameters. But in this manuscript, we study CAS with know parameters. We study the description of CAS of two same structures of the shape (1) with specific parameters. This kind of synchronization can be looked into for chaos and hyperchaos complex nonlinear structures figuratively speaking. The possibility of CAS can be viewed as syncretizing between AS 17 and CS. 8 AS occurs within the genuine part of the fundamental structure and the fanciful part of the slave model; however, CS achieves among the genuine part of the slave system and the nonexistent piece of the principal model. In CAS, the state variable of the main system synchronizes with other state factors of the slave structure. In this manner, the (CAS) gives progressively essential safety in secure communications. We might want to propose a global plan to study and to achieve the (CAS) of pair indistinct befuddled complicated nonlinear structures in the shape (1). By a particular end objective with display, the aftereffects about our plan for two undefined systems of the state (1), we choose, to the example, the disarranged mind boggling nonlinear model 27
where
The course of action of this paper is as per the taking after: In section “A plan to accomplish CAS,” we layout the suggested plan to accomplish CAS of two vague befuddled complicated nonlinear structures in the shape (1). In Segment 3, we apply the results of our conspire to achieve CAS, for occasion, between two undefined disorganized complex nonlinear systems within the shape (2). Numerical results are used to demonstrate the authenticity of this survey. Finally, the essential fulfillment of our tests is consolidated in Segment 4.
A plan to accomplish CAS
We study two indistinguishable disorganized complicated nonlinear structures of the shape (1); one is the main structure (we act the main model including the index

likewise, the other is the controlled slave structure (including index s) as

such that the added element complex controller
Definition
Pair joined complex dynamical structures in a main-slave arrangement may display CAS if the vector of the unpredictable mistake or error function ∇ define as 26

where

and

Comment 2
In equation (6), the wrong or error among the genuine part of slave model or framework
Comment 3
From equation (7), the total of the fanciful part of slave structure
Comment 4
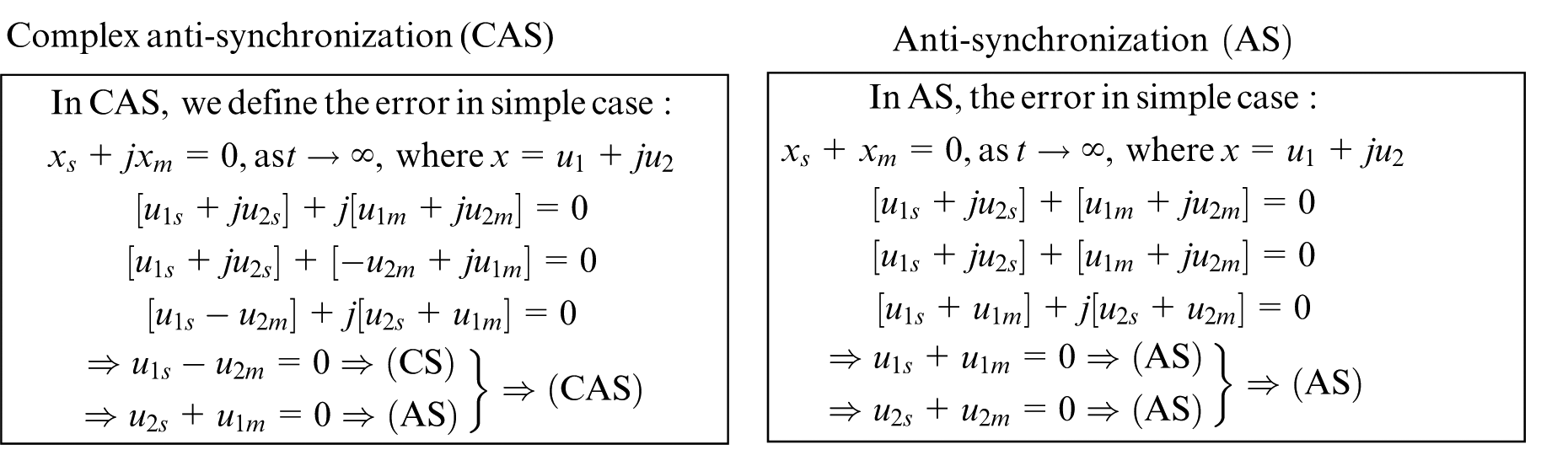
1. The difference among CAS and AS 17 can be delineated from
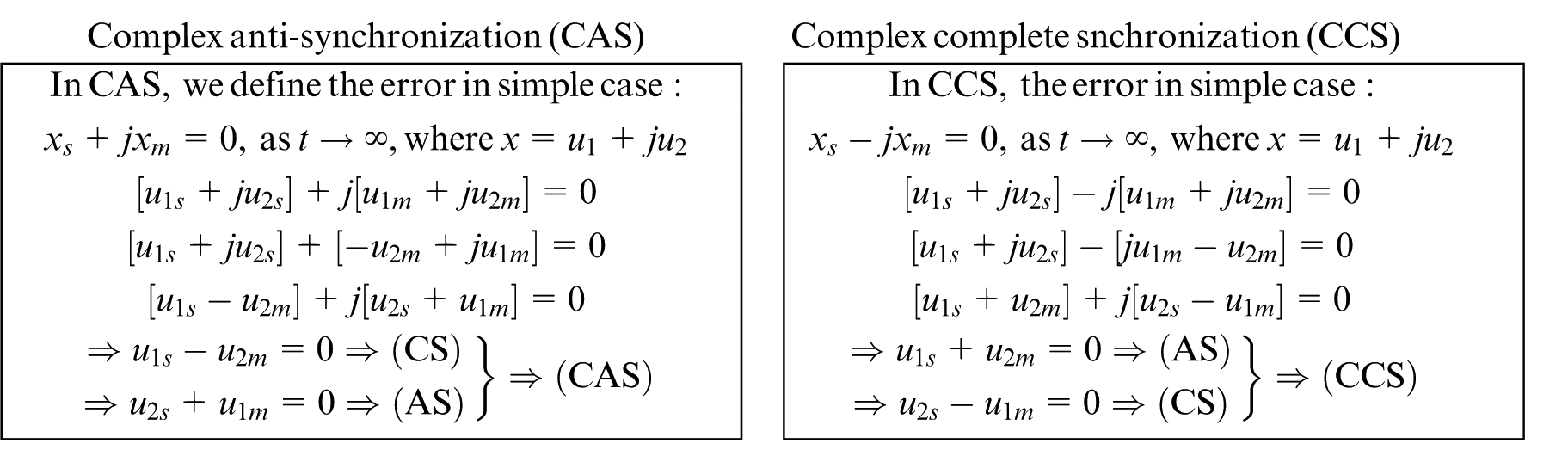
2. The difference among CAS and CCS 8 can be delineated from
Comment 5
From Comments 2–4, CAS combines between CS and AS.
Theorem 1
In the event that a nonlinear controller is originated essentially
at that point the slave framework (4) synchronizes the main or master framework (3) asymptotically under the requirements of CAS, where
Proof
Of the meaning of CAS

So

From disorganized complex frameworks (3) and (4), the blunder or error complex dynamical framework was identified as
By dividing the genuine and the fanciful elements in equation (11), the blunder complex model is formulated essentially as
For the positive parameters in the structure (12), the unmistakable positive measure of the Lyapunov work is 8
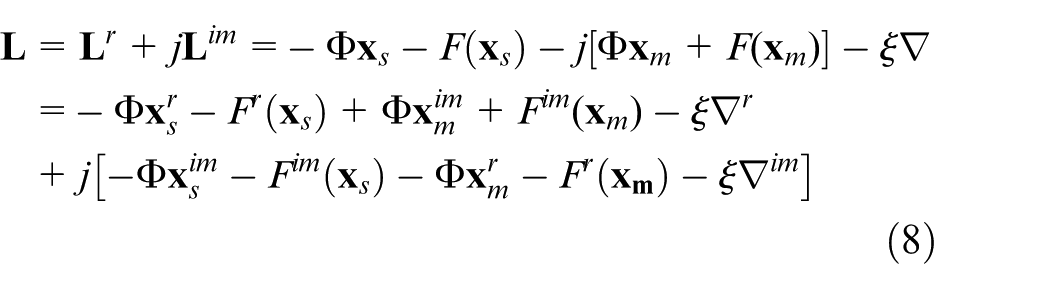
Remark presently that the total time subordinate of
With replacing from equation (8) regarding
For
Comment 6
Our scheme is suitable also for hyperchaotic frameworks. At long last, our scheme is outlined in section “For example” by applying it, for instance, for two indistinguishable clamorous complex frameworks (eqaution (2)) with specific parameters.
For example
Description of the controller
In this section, we think about CAS within the disordered complex (2). Along these lines, the master framework is depicted by
The equations of the slave framework are

The master and slave frameworks with complicated variables can be modified separately as

and
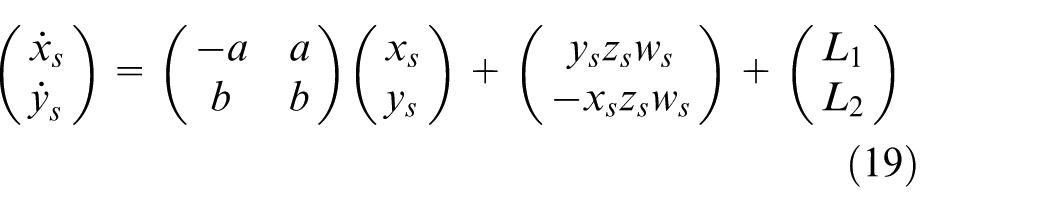
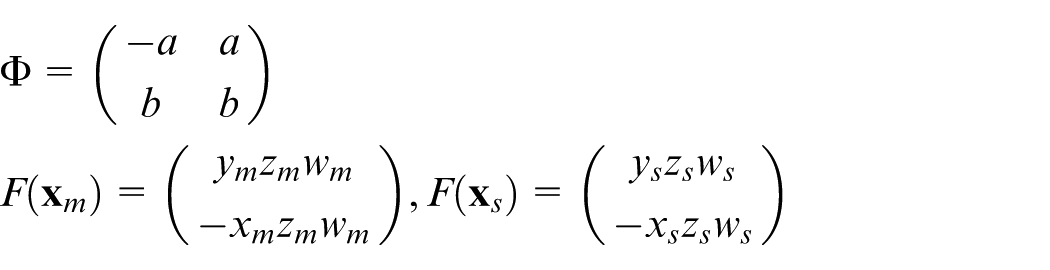
Considering frameworks (18) and (19) are equal to frameworks (3) and (4) separately so
As per Theorem 1, the controller is planned as
Numerical simulation
To manifest and assert the handiness of the suggested design, we light up the reproduction aftereffects of the CAS amid two same chaos complex systems (16) and (17). Structures (16) and (17) with the controller (20) are lighted numerically. The parameters of the framework (16) are picked as
In Figure 1, the arrangements of equations (16) and (17) are proposed subject to different starting states and show that CAS is achieved after a by no time t. We can see that each
CAS between two indistinguishable frameworks (16) and (17) with the controller (19): (a)
CAS errors between frameworks (16) and (17): (a)
The orthogonal trajectories of frameworks (16) and (17).
In the numerical amusements, we figure the module blunders and stages mistakes of primary and slave frameworks, freely. For each complex number, the module and stage are resolved as pursues

and
Figure 4 shows the modules errors and phase errors of the main systems (16) and slave frameworks (17). It is evident from Figure 4(a) and (b) that the modules errors
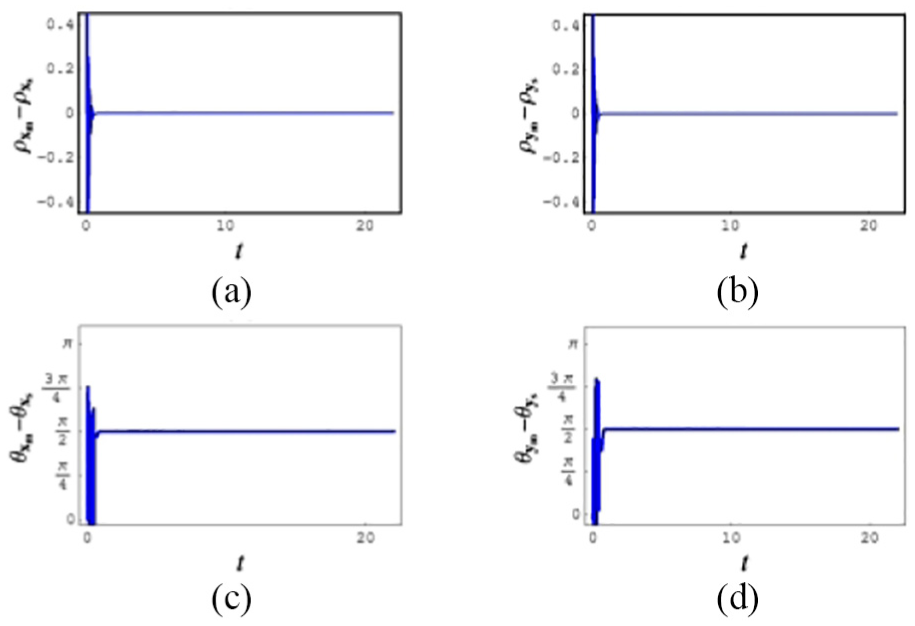
The phases errors and modules errors of frameworks (16) and (17).
Conclusion
In this work, we present another kind of complicated synchronization which is named CAS. We analyze and concentrate the (CAS) concerning two same disordered complicated nonlinear structures. The CAS may be gathered only in complicated nonlinear systems. The CAS may be seen as syncretizing among AS and CS (see Figure 1). In CAS, the state variable of the primary structure synchronizes with different state variables of the slave model (see Figure 1). This way, CAS provides increasingly unmistakable safety in secure exchanges. The common striking characteristic for the CAS is that the trajectories of the master (or principle) and slave systems are leading converse or symmetrical to one another including a comparative shape (see Figure 3(a) and (b)). These wonders did not result and showed up for any sorts of synchronization in the writing.
A design is spread out to recognize CAS of two indistinct complicated nonlinear systems in light of Lyapunov limits. In the midst of this design, we shut the control complex abilities demonstratively to achieve CAS. It is straightforward and accommodating to use this plan for chaos and hyperchaos complex structures. We apply our method, for example, for two vague wild, complicated systems with different beginning characteristics the fundamental structure (16) and slave frameworks (17). Numerical entertainments of our case affirm all the theoretical results. A splendid understanding is built up as appeared in Figures 1–3. In Figure 4, we procedure the modules mistake and stages blunders because, in the complicated nonlinear dynamical model, the recognizable or quantifiable physical sums generally are phase and module.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.