
Abstract
The paper presents a design scheme of the linear dynamic feedback controller for some non-linear systems. These systems are mathematically described by matrix non-linear differential equations of the first and second orders. A first-order form of the studied systems includes some types of differential-algebraic equations. The stability property of the non-linear systems with the linear controller is assured by an appropriate definition of the system output, and the linear dynamic compensator is an important part of the feedback control system. The order of the dynamic part is equal to the size of the system input and is independent of the size of the system state vector. The asymptotic stability in the Lyapunov sense is analysed and proved by the use of Lyapunov functionals and LaSalle’s invariance principle. Stabilisation in a wide range of controller parameters improves the system’s robustness.
Introduction
Almost all real systems are non-linear by nature and it is well known that non-linearity needs complex analysis. On one hand, the dynamics of a non-linear system is difficult to analyse and gives rise to interesting phenomena such as bifurcations, limit cycles and chaos. On the other hand, non-linear systems have a wide range of uses in mechanics, electronics and robotics. For example, many mechanical systems are subject to non-linear friction. Non-linear electronic elements are used to design electronic devices with specific features such as parameters, amplifiers, up-converters, mixers, low-power microwave oscillators and electronic tuning devices. Ferromagnetic cores in electrical machines and transformers are often described with non-linear magnetisation curves. Therefore, it is desired and advantageous to consider non-linearities directly, while analysing and designing the controllers for such systems. The controller itself, however, should be, if possible, linear, robust to the parameters’ uncertainties and external disturbances, with the lowest possible order of the dynamic part, and easily implemented in real-time embedded platforms. This is because, in modern applications, the controller is a system that can be considered as a combination of computer hardware and software designed to perform a dedicated control function. The control is then implemented in a custom hardware platform, which is often designed and configured for that particular application. During this phase, all aspects highlighted above, and also in Skruch et al.,1,2 are especially important for their efficient and effective implementation and realisation.
The stabilisation of non-linear second-order systems finds applications in mechanics, electronics and robotics. As examples, we can consider robots with flexible links, vibrating structures as beams, buildings and bridges, electrical circuits, oscillators, synchronous machines and so on. In recent years, there has been also a growing attention to studies on ladder networks because they are strictly correlated to interconnection problems, couples mechanical systems, analogue neural nets, distributed amplifiers and so on. Ladder networks may be described as networks formed by numerous repetitions of an elementary cell. In case of an electric ladder network, the elementary cell may consist of resistors, inductance coils and capacitors connected in series or in parallel. If the elementary cell contains non-linear circuit element, then the electric ladder network can be mathematically described by matrix–vector second-order differential equations.
The aim of the paper is to design a linear dynamic feedback controller, able to asymptotically stabilise some classes of non-linear systems. Two classes of dynamic systems that can be stabilised by the same form of control law are studied in the paper. The first class is mathematically described by matrix non-linear differential equations of the second order. The stabilisation problem is then solved entirely in the second-order setting, that is, no transformation to a first-order system is invoked. Retaining the model in the second-order form is also computationally efficient, as the dimension of the system is lower than that of the first-order form. In the second-order form, acceleration feedback can be used in its original form which is not possible in the first-order form because the available states are displacement and velocity. The second class of the system is described by matrix non-linear differential equations of the first order. This class includes some types of differential-algebraic equations (DAEs). With DAEs, the derivatives are not, in general, expressed explicitly. This means that the first derivative cannot be solved for other terms. The stability property of the described classes of the non-linear systems with the linear controller is assured by the appropriate definition of the system output and the linear dynamic compensator, which is an important part of the feedback control system. The order of the dynamic part is equal to the size of the system input vector and is independent of the size of the system state vector. It is proven analytically that the corresponding closed-loop systems are asymptotically stable.
In this paper, the term (asymptotic) stability refers to the stability of equilibrium points in the sense of Lyapunov. 3 In order to determine the stability of equilibrium points of the system, Lyapunov’s second method 3 together with classic LaSalle’s invariance principle 4 are utilised. It is worth to be noting that in recent years, several generalisation of this principle have been investigated, for example, in previous works.5–7 However, the purpose of this paper is to utilise classical version of the principle where it appears straightforward and conclusive. Both methods, both in classical and non-classical versions, are now widely recognised as the most powerful techniques for analysing the stability of the systems whose dynamics is described by non-linear differential equations. The advantage of the method is that it does not require the knowledge of solutions in order to analyse the stability of the system. In practice, however, finding suitable Lyapunov functions for a given system is challenging. Last but not least, the advantages of the presented approach should be mentioned. The stability of the closed-loop systems is assured in a wide range of the controller’s parameters, which definitely improves the system’s robustness.
Related work
The stabilisation scheme that is presented in this paper was initiated in Kobayashi 8 for linear undamped second-order systems. The LC ladder network consists inductors (L) and capicators (C) elements. The concept was later developed in Mitkowski9,10 for LC ladder networks and extended in Kobayashi 11 to linear infinite-dimensional oscillatory systems. In Tsinias, 12 a linear state feedback was designed to stabilise globally a class of uncertain non-linear systems that are dominated by a chain of integrators perturbed by a triangular vector field with linear growth. For the same class of systems, Qian and Lin 13 proposed a linear output dynamic controller and proved the global asymptotic stability of the closed-loop system. The output feedback stabilisation was further researched in Karagiannis et al. 14 for another class of non-linear systems. The results presented in this paper are especially interesting, as the proposed method does not require the input of a Lyapunov function of the closed-loop system and relies on the asymptotic reconstruction of a stabilising state feedback control law. The controller itself, however, contains some non-linearities. In Yeom and Choi, 15 a switching control method for a special class of non-linear systems, which is difficult to be stabilised by existing methods such as feedback linearisation, backstepping, control Lyapunov function and sliding model control, was proposed. The class of the systems studied there is relatively narrow, as it contains only two variables in the system state and has a single input with a constant input matrix. The proposed control law is also not linear and not continuous.
Different forms of non-linear feedback control laws for non-linear systems described by scalar second-order differential equations were considered in previous works.16–18 The approach presented in these papers can be, to some extent, applied to more general classes of non-linear systems. A class of second-order multiple-input multiple-output (MIMO) non-linear systems was studied in previous works.19,20 This class is characterised by second-order differential equations with time-varying and non-linearly parameterised functions and additive bounded disturbances. The authors developed a continuous, saturated and non-linear controller, which ensures that the system state tracks a desired trajectory asymptotically despite uncertainty in the system dynamics. The feedback control law is based on smooth hyperbolic functions and is therefore non-linear. Sliding mode controllers were presented in previous works21–26 for similar types of non-linear systems as studied in this paper. These systems can describe rigid n-link robot manipulators, for example. Under the sliding mode method, a proper sliding surface is defined first, followed by the design of a controller to derive the system states to the defined sliding surface. As fractional-order calculus has only recently attracted interest in the control system community,27,28 it is also worth mentioning the work of Aghababa, 29 in which a novel fractional non-singular terminal sliding mode controller suitable for second-order fractional non-linear systems is proposed. Finally, it is also worth mentioning the paper, 30 which provides a necessary and sufficient condition for the existence of stabilising feedback for non-linear systems by using vector Lyapunov functions.
Contribution
The main contribution of the paper is to design a linear stabilising dynamical feedback control law for two classes of non-linear dynamical systems. The classes studied in the paper are described by matrix–vector non-linear differential equations of the first and second orders. It is shown that through the proper definition of the system output, the same form of linear dynamic feedback can asymptotically stabilise both types of systems. The property of the asymptotic stability of the corresponding closed-loop systems has been proved by LaSalle’s invariance principle with the use of the appropriate Lyapunov functions. Many authors have studied similar classes of non-linear systems as those presented in this paper. Others have also discussed the stabilisation concept for non-linear systems using linear dynamic feedback controllers as proposed in this paper. To the best of the authors’ knowledge, however, there are no papers available that consider a linear dynamic controller for the described family of non-linear systems, especially DAEs. This paper can also be considered as a generalisation of the results obtained in Skruch. 31 The generalisation includes (1) adding additional non-identity matrix before second-order derivative, (2) making input (control) matrix non-linear, (3) adding to the non-linear matrix before first-order derivative additional dependency on state vector and (4) extension of the results to first-order form of the system.
Organisation of the paper
The paper is organised as follows. The studied systems are mathematically described in the ‘Systems description’ section. Next, in the ‘Controller design’ section, the main results are presented, that is, the design of the linear dynamic feedback controller with the proof for the stability of the corresponding closed-loop systems. The final section contains some comments and conclusions.
Systems description
Consider a class of control systems whose dynamics is described by the matrix non-linear differential equation of the second order

where
Consider now a class of non-linear systems that is similar to equation (1) but does not contain a second derivative

This class includes some types of DAEs, as the first derivative is not expressed explicitly and cannot be solved in terms of other terms (
For both system representations, the output is defined in the following way

where

Controller design
Consider the controller

that consists of a proportional gain

where
The closed-loop system corresponding to equations (1), (5) and (6) is given by

Theorem 1
Suppose that the following conditions are fulfilled for system (7), (8):
The functions
System (7), (8) has only one equilibrium point
Then, the zero equilibrium point of system (7), (8) is locally asymptotically stable (in the Lyapunov sense).
Proof
Consider the following Lyapunov functional
where
It can be concluded with the help of Lemma 1 that
and next
Along the solutions of system (7), (8), it holds that
which is equivalent to
Using the fact that

and grouping some elements together yield

According to LaSalle’s theorem,
4
the trajectories of system (7), (8) enter asymptotically the largest invariant set in

and

It should be noted that

This means that
Now consider the closed-loop system that corresponds to equations (2), (5) and (6)

Theorem 2
Suppose that the following conditions are fulfilled for system (20), (21):
The functions
The matrix
System (20), (21) has only one equilibrium point
Then, the zero equilibrium point of system (20), (21) is locally asymptotically stable (in the Lyapunov sense).
Proof
The proof procedure is similar to that of Theorem 1 after choosing the following candidate for the Lyapunov functional
Lemma 1
If
Proof
The line integral extends the concept of the Riemann integral in one dimension towards integration along a curved path in n-dimensional space
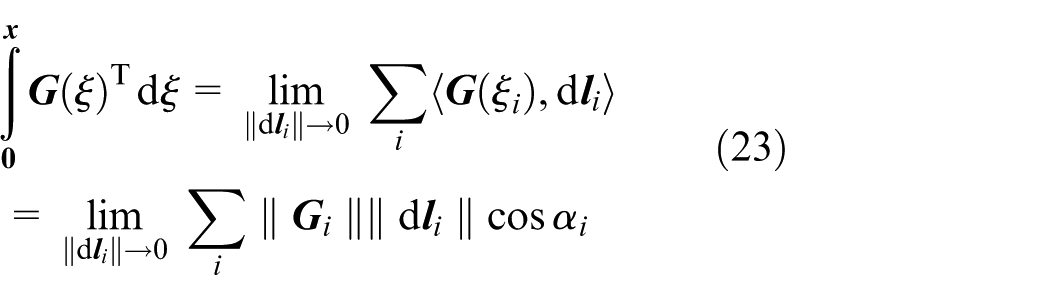
where
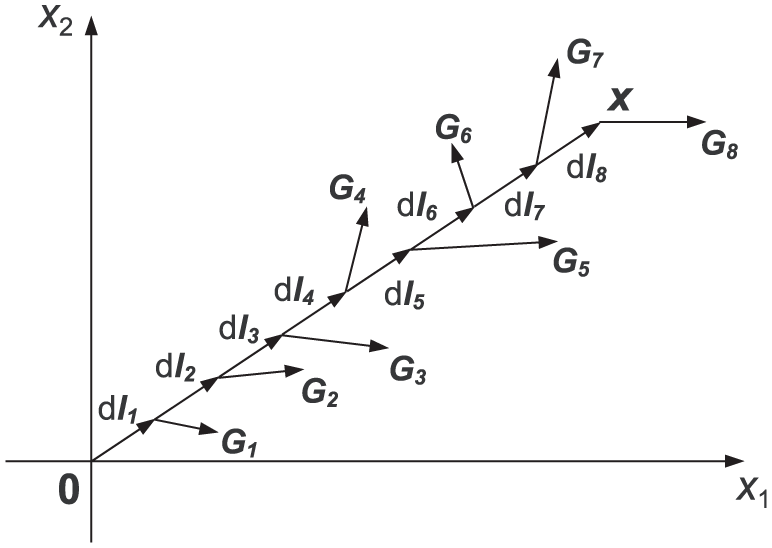
Concept of a line integral along the straight line.
Following the assumption related to the function

and consequently
Illustrative example
Consider an analogue electrical RLC circuit that is presented in Figure 2. The circuit consists of resitors (R), an inductor (L), a capacitor (C) and a controlled voltage source. If the current
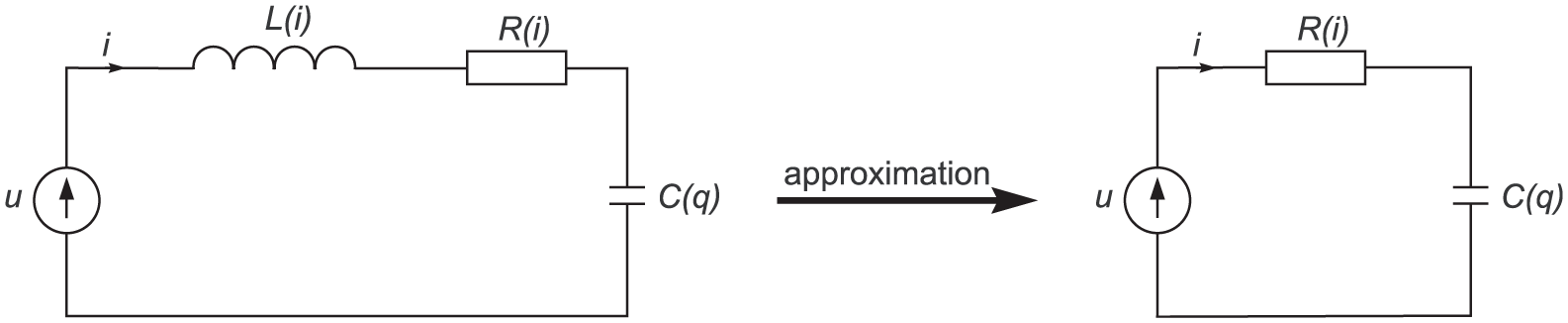
Non-linear RLC circuit and its approximation in the form of the RC circuit.
Let us assume that the elements of the circuits have non-linear characteristics. The resistor is an element that is fully characterised by the relationship between voltage, current and resistance. The paper focuses on the so-called current-controlled resistors, which means that the voltage drop

where
The inductor is an example of a dynamic circuit element. The relationship between the voltage drop
where
The capacitor is defined as an electronic component whose charge is a function of voltage. In this paper, it is assumed that the voltage drop

where
The voltage source is a voltage-controlled device with the possibility to implement a control algorithm. Units are omitted for simplification: unless noted, voltage is measured in volts (V), current is measured in amperes (A), electric charge is measured in coulombs (C), resistance in ohms (Ohm), inductance in henrys (H) and capacitance in farads (F).
The dynamic behaviour of the RLC circuit can be described by the following equation
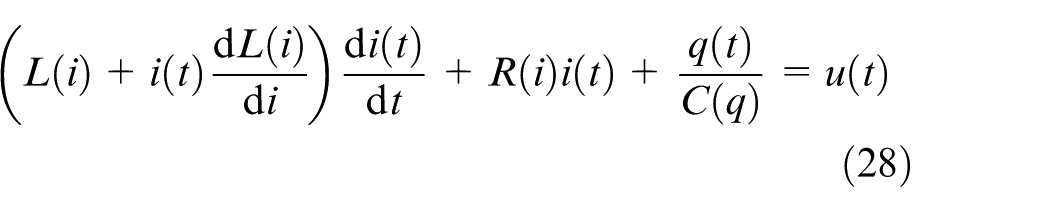
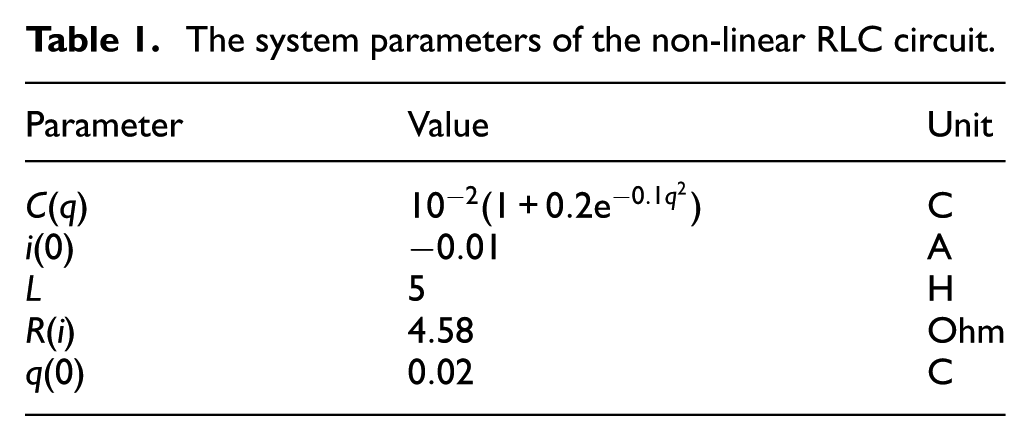
The system parameters are shown in Table 1.
The system parameters of the non-linear RLC circuit
Denote
Consider the controller (5) whose parameters are given in Table 2. According to Theorems 1 and 2, the closed-loop systems corresponding to the RLC circuit and its approximation in the form of the RC circuit are asymptotically stable when the linear dynamic controller (5) is applied.
The system parameters of the linear dynamic controller.
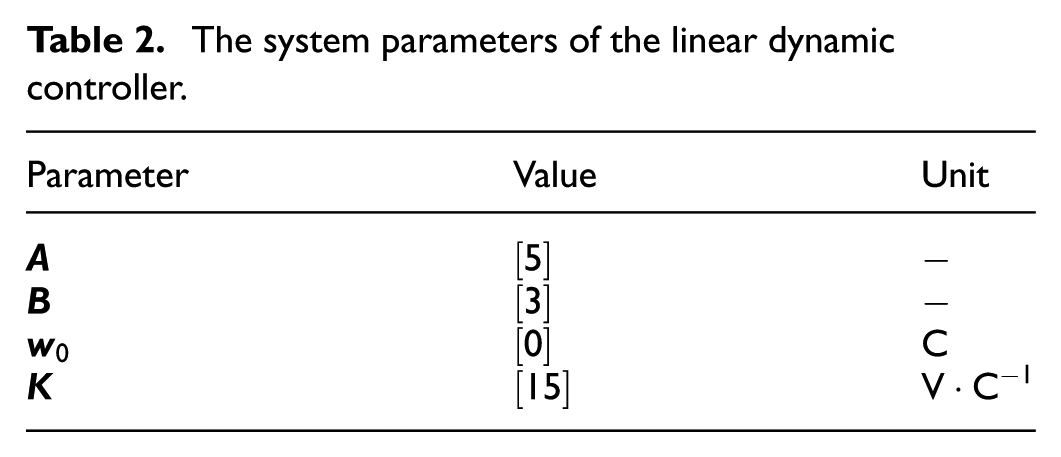
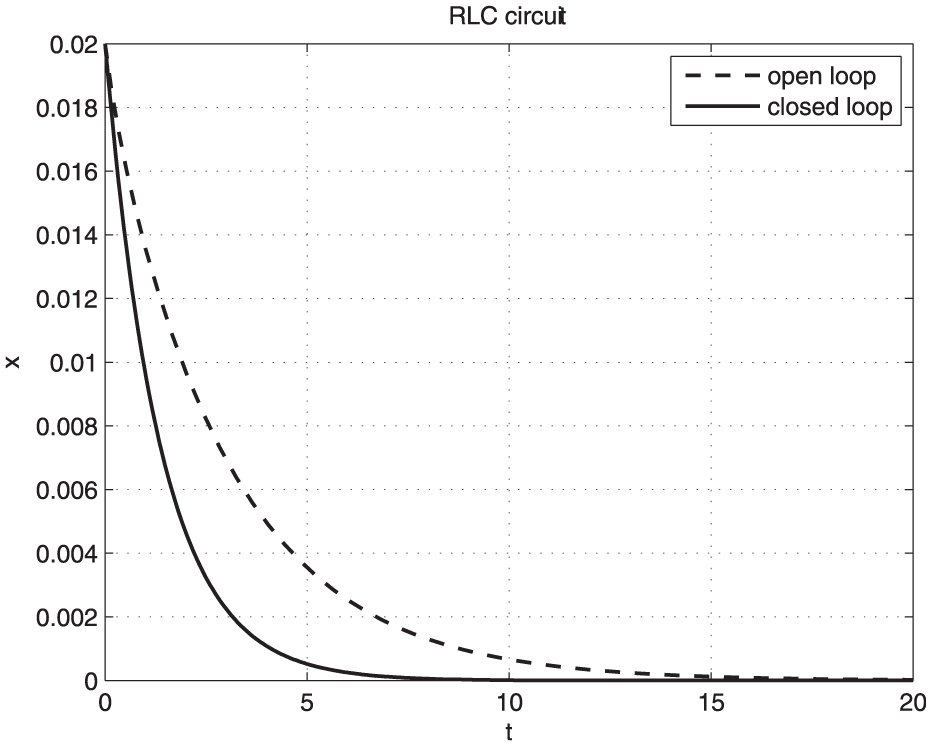
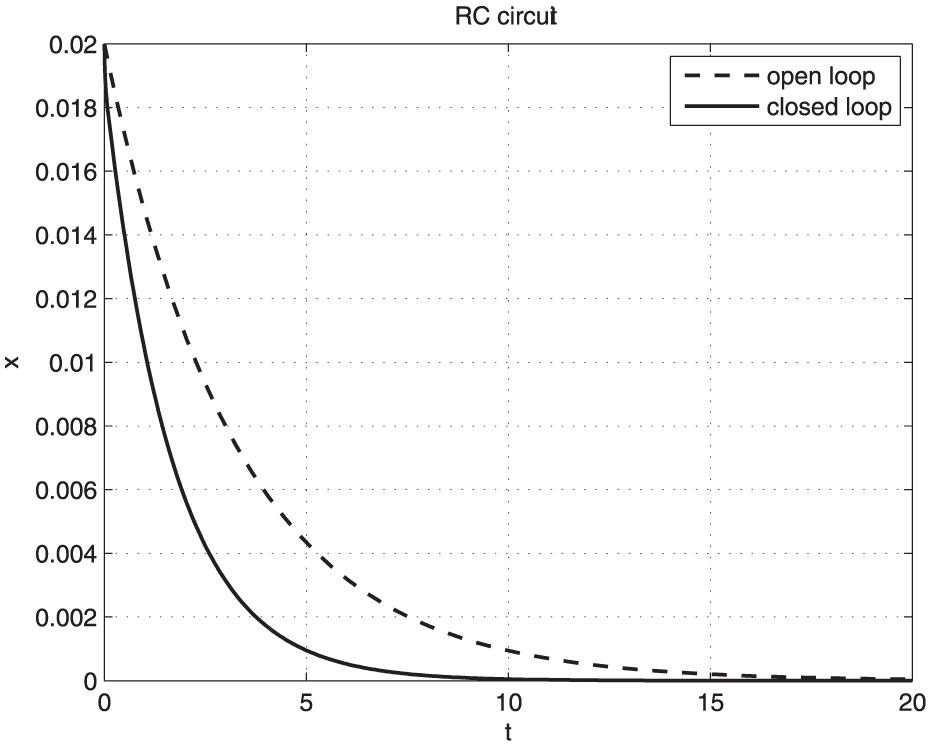
Figure 3 illustrates the comparison between the open-loop trajectories of the RLC circuit and its approximation in the form of the RC circuit. There are slight differences in damping ratios but, in general, the dynamics is similar. The trajectories of the closed-loop systems are shown in Figures 4 and 5. The asymptotic stability property is guaranteed. The control signals are presented in Figures 6 and 7.
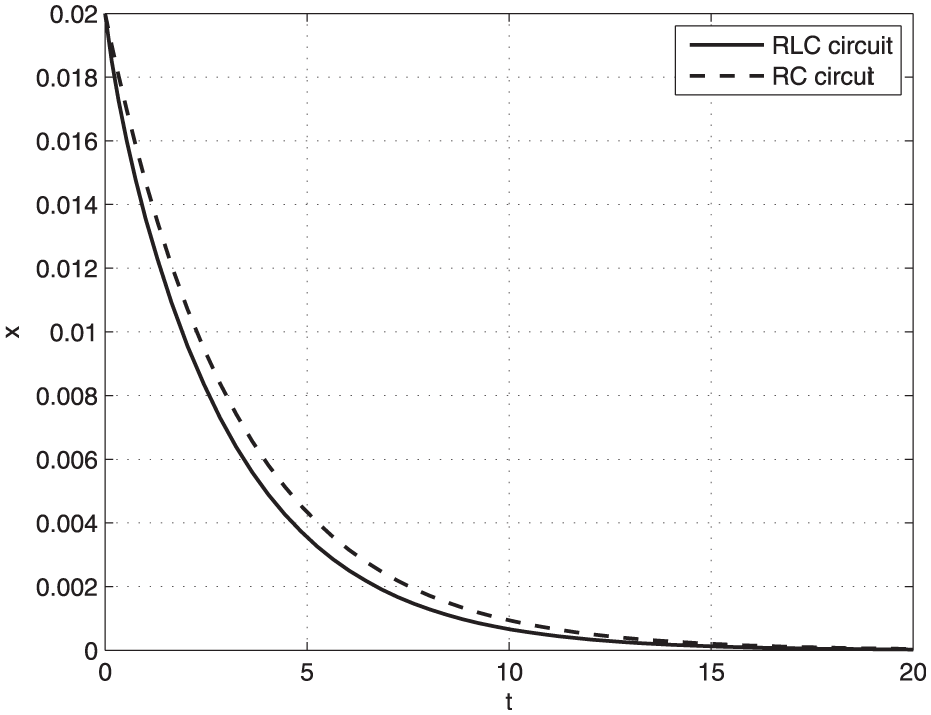
Comparison of the trajectories
The trajectory
The trajectory
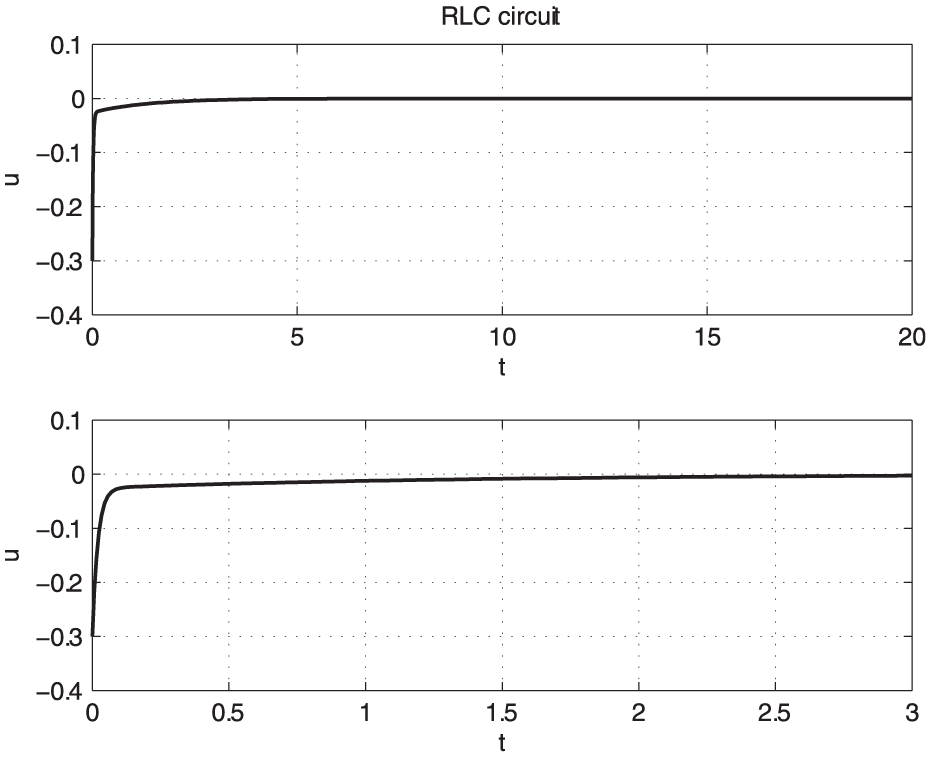
The control signal
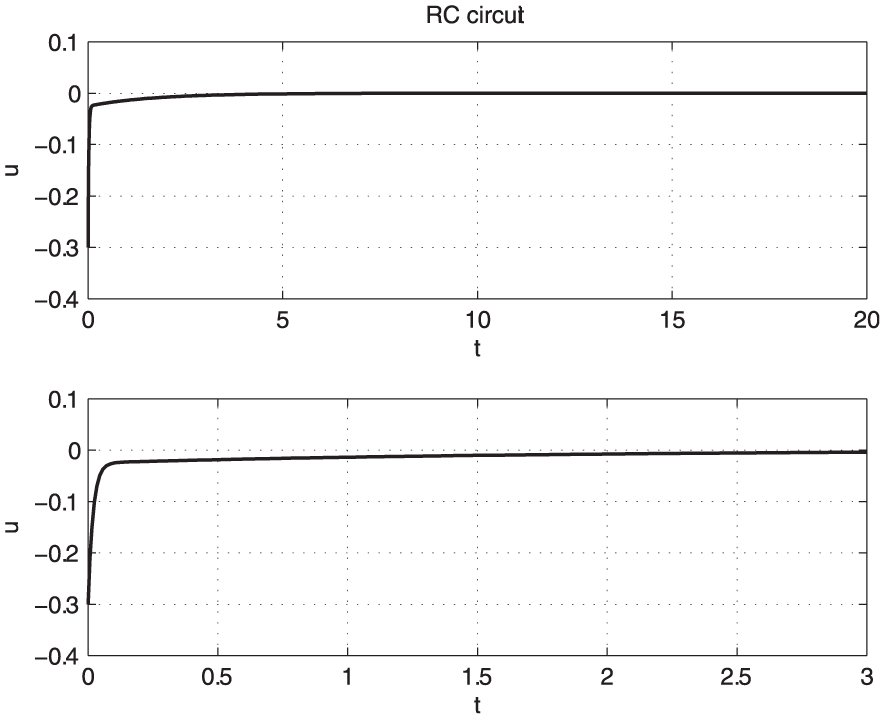
The control signal
Discussion and conclusion
System (1) can be rewritten equivalently in the first-order form

where
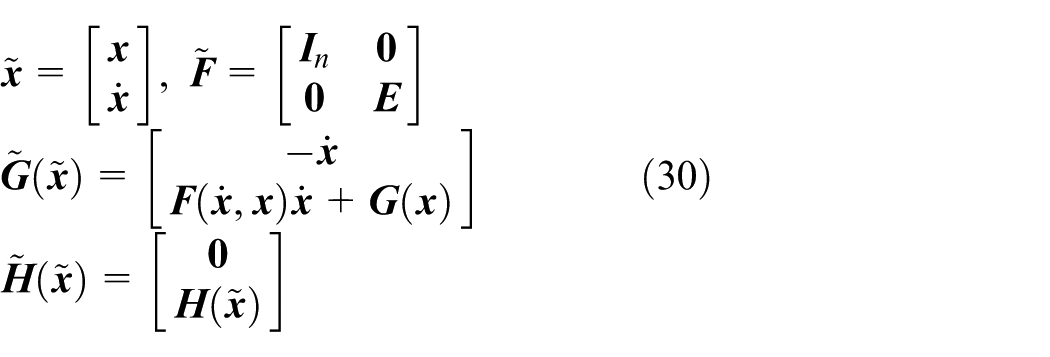
It is easy to show that the matrix

Thus, systems (1) and (2) cannot be considered as equivalent systems. This is to be expected as, generally, dynamic properties of second-order differential equations are different from first-order differential equations. It may also seem that system (2) is equal to (1) for the case of
In this paper, the stabilisation problem of non-linear dynamical systems has been investigated. It has been shown that two different classes of non-linear control systems can be asymptotically stabilised with the help of the same linear dynamic feedback control law. The dynamic behaviour of the first class of the systems is described by non-linear differential equations of the first order, while the other class is described by non-linear differential equations of the second order. The second class can be considered as an approximation of the first, which occurs for slowly varying systems when the second derivative of the system state can be neglected compared to the first. The asymptotic stability of the closed-loop system has been proved by LaSalle’s invariance principle with the use of the appropriate Lyapunov functions. Based on the simulation results, it can be concluded that the proposed feedback law is effective. It should be also mentioned that the proposed stabilisation approach is valid only for some classes of the non-linear dynamical systems, and these classes because of the defined assumptions are naturally restricted and narrowed. It would be an another question of what linear control can stabilise the systems without or with more weakened assumptions. Numerical calculations and computer simulations have been performed in the MathWorks MATLAB/Simulink environment.
Computer systems for controlling industrial processes (also called embedded control systems) are often subject to constraints in size, energy and implementation. These constraints when applied to the software systems with dynamic behaviour favour algorithms without non-linearities and with the lowest possible order of the dynamic part. During implementation process, various target system implementation constraints shall be also taken into consideration, such as real-time operating system, scheduling details, signal representation and fixed-point versus floating point number specification. Hence, having the model of the controller in a linear form will be definitely easier to implement and computationally more efficient which can be a very important feature for real-time applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.