
Abstract
To improve surplus torque suppression and loading performance of electric load simulators, this paper presents a loading control strategy based on the new mapping approach and fuzzy inference scheme in the fuzzy Cerebellar Model Articulation Controller. The proposed mapping approach and fuzzy inference scheme in the fuzzy Cerebellar Model Articulation Controller, designed free from the mathematical model of system, comprises a mapping fuzzy Cerebellar Model Articulation Controller and a fuzzy inference controller, in which the former is the main controller. By introducing the new mapping approach in mapping fuzzy Cerebellar Model Articulation Controller, the proposed control strategy is actually a global network with local weight updating and its continuity has been enhanced. The fuzzy inference controller is used as a fuzzy compensator. As a torque controlled system, electric load simulator takes the loading error as the performance index. The results of dynamic simulation and experiments indicate that the proposed loading control strategy can achieve favorable control performance.
Keywords
Introduction
Electric load simulator is an important test equipment in the hardware-in-the-loop simulation of the flight control system under laboratory conditions. Its task is to simulate the aerodynamic hinge moment of the rudder in the actual working process and to test the performance of the rudder system. Using the electric load simulator to replace the traditional field test is cost efficient, more flexible and easy to control. However, the inherent nonlinear factors and the interference of external surplus torque in electric load simulator make it difficult to achieve satisfactory control effect for conventional model-based control methods.
The Cerebellar Model Articulation Controller (CMAC), proposed by Albus 1 in 1975, is widely used in data fusion,2,3 intelligent control4–7 and many other fields8–11 for its simple architecture, quick learning convergence and inexistence of local minimum.12–14 For simulating the human cerebellum, however, one drawback of CMAC is its binary input activating function. 15 CMAC uses a simple binary logic 0/1 to classify the space division and makes the activation judgment, but the binary logic is not consistent with the cognitive characteristics of human cerebellum to the outside world. The human cerebellum is more inclined to cognize without an obvious boundary and is suitable for the high-order continuous derivative of the excitation signals.
The control performance of CMAC can be enhanced by improving the continuity which can be easily linked with fuzzy logic. 16 Fuzzy Cerebellar Model Articulation Controller (FCMAC) was first presented by Nie and Linkens 17 in 1994, by using the graded neighborhood function and the matching degree algorithm. The proposed FCMAC effectively reduced the influence of the discontinuous responses at neighborhood boundaries and achieved better control effect. Geng 18 used the third-order spline function as the fuzzy membership function to improve the continuity and generalization between similar input vectors. Besides, the proposed FCMAC showed better learning capability in approximation arbitrary one-dimensional (1D) and two-dimensional (2D) function and achieved good system response in the active vibration control (AVC).
In recent years, most of the related researches on FCMAC usually use the fuzzy membership function to improve the continuity of the system, which is considered as a general way to improve the control performance. 16 However, considering the stability and speediness of control, the FCMAC controller is usually combined with other controllers to achieve better control effect. Ke and Wang 19 proposed a parallel controller of FCMAC and proportional–derivative (PD), meanwhile, adopted the integral controller to control the internal force. The controller had been successfully applied to the flexible dual-arm space manipulators, but only simulation results were given. Cheng 20 used FCMAC as a main controller and the approximation error of FCMAC was compensated by a supervisory controller. The parameters of controller were derived from the Lyapunov theorem so that the closed-loop stability of system can be theoretically guaranteed. Lin and Li 21 introduced an integral sliding surface to eliminate the steady-state errors, while FCMAC and a fuzzy controller were used to perform a desired action. To speed up the parameter learning, a proportional–integral adaptive learning algorithm was also developed. Wang et al. 22 proposed a compound controller with a supervisory controller integral sliding surface and an adaptive FCMAC. And the adaptive FCMAC was incorporated a compensating controller, which was derived from the Lyapunov approach. Chao et al. 23 used a self-adaptive global best harmony search algorithm to train FCMAC networks. The proposed algorithm can optimize the weight values of FCMAC networks, the center position, and width parameters of Gaussian membership function. It provided a method for solving the function approximation problem to improve FCMAC networks. The CMAC-based control strategy is usually considered as a strategy independent of the system model. However, all research mentioned above need a relatively accurate mathematical model of the system. When the control object is an existing nonlinear system and an accurate mathematical model cannot be obtained, the control effect will be greatly reduced. Furthermore, in practical engineering applications, such as electric loading simulator systems, hydraulic-mechanical-electric systems24–27 and torque loading systems with complicated mechanical structures, it is necessary to consider how to overcome the inherent nonlinear factors, parameter uncertainties and problems from many aspects when designing effective control strategies. And researches on this field have been increasing in recent years. Zhao et al. 28 applied an FCMAC compound controller in the ship steering system to overcome the nonlinear problems. This control strategy improved the anti-disturbance capacity of the system and the robustness of adapting to the variation of internal parameters in the loading experiment. The study verified feasibility and advantages of FCMAC-based control strategies in the nonlinear system.
The previous research mainly used the fuzzy membership function in FCMAC to improve the continuity and the control performance compared with the conventional CMAC. Further enhancing the continuity is usually neglected. Fuzzy logic systems are considered as universal approximators; 29 thus, fuzzy logic system is assumed as an intelligent system with reasoning capability and can be applied to many nonlinear problems. While in FCMAC, the fuzzy inference mainly fuses to the FCMAC structure30,31 or used to select the firing strength in the multidimensional case.15,18 We can implement more about fuzzy logic in CMAC and use fuzzy inference more adequately than the previous works.
In this paper, a new mapping approach and fuzzy inference scheme in the fuzzy Cerebellar Model Articulation Controller (MIFCMAC) is proposed and used as the torque tracking controller for electric load simulator. The proposed MIFCMAC is composed of a mapping fuzzy Cerebellar Model Articulation Controller (MFCMAC) and a fuzzy inference controller. In the MFCMAC, we introduce a new mapping approach to further enhance the continuity of FCMAC for better control performance. The fuzzy inference scheme is adopted as a fuzzy inference controller, and its structure is derived from FCMAC. MFCMAC is the main controller of MIFCMAC, while the fuzzy inference controller is used as a fuzzy compensator for output. The proposed controller has the capability of fuzzy inference and can enhance the continuity with a new mapping approach. The design of controller is completely independent from the mathematical model of electric load simulator, which makes a flexible implementation. And the proposed control strategy is 1D method; thus, the memory size and computing burden have been reduced. The simulation and experimental results have shown good torque tracking performance in electric load simulator. The proposed control strategy can be applied to other nonlinear systems as well.
This paper is organized as follows. Section “Design of MIFCMAC” describes the design of MIFCMAC; section “Modeling of electrical load simulator” gives a brief introduction of the electric load simulator and its modeling; section “Simulation results” presents the simulations of MIFCMAC; section “Experimental results” details the experimental results; and section “Conclusion” contains some conclusions.
Design of MIFCMAC
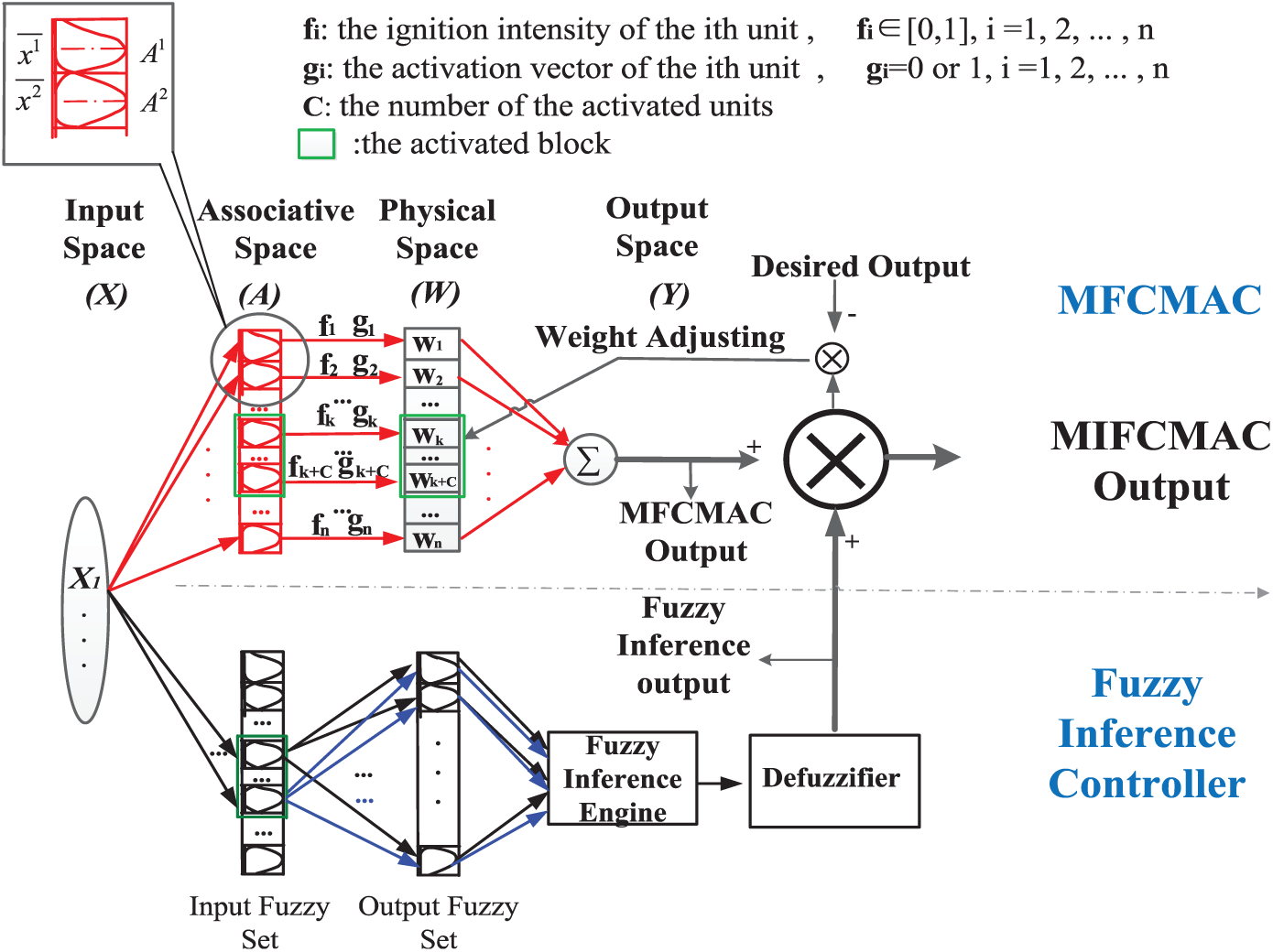
MIFCMAC is composed of the MFCMAC and the fuzzy inference controller (Figure 1). MFCMAC is the main controller and the fuzzy inference controller is the fuzzy compensator to eliminate the control error of the main controller. MFCMAC and the fuzzy logic controller perform a special parallel control process. The fuzzy inference controller occupies the main control at the beginning when the weight space is at the initial learning state. With the deepening of the MFCMAC learning process, the output of the fuzzy inference controller decreases while the MFCMAC output increases rapidly and dominates the control output. The fuzzy inference is introduced to compensate the control error of MFCMAC.
Structure of CMAC applying the new mapping approach and fuzzy inference.
MFCMAC
The proposed MFCMAC consists of the Input Space X, the Associative Space A, the Physical Space W, and the Output Space Y (Figure 1).
The Input Space X quantizes the input variables and maps it to all the units in the Associative Space A according to the given control space. X can be multidimensional, and only 1D space is considered in this paper. MFCMAC can divide A into several input fuzzy sets according to the range of the input, and every unit in A can be seen as an input fuzzy set. Since the Gaussian membership function has characteristics of symmetry and smoothness, it is introduced to represent the membership of the input variable to each input fuzzy set in this Space. The Gaussian membership function takes the following form

where
For a given quantitative input, several units will be activated in A and can be seen as a block. The similar input will activate the similar block. The activated block is indicated by the green rectangle in Figure 1. A can decide which units to be activated according to the input variable and records it in g. If the kth unit is activated,
where

Each unit in the Physical Space stores the weight value and the activated units can adjust their weights according to the weight adjusting process. It is necessary to consider the selection of weight adjusting method from the perspective of system stability. The gradient descent method is one of the conventional methods in CMAC-based control strategy. By setting the learning rate in a reasonable range, it can guarantee stability at the theoretical level. 32 And the method is easy to adjust in simulation and experiment. Therefore, the weight adjustment uses the gradient descent method to update the weight memory at the end of each epoch

where

Thus, only local weights in Physical Space are updated, but all weights are outputted. MIFCMAC is actually a global network with local weight updating.
Fuzzy inference controller
In the MFCMAC in section “MFCMAC,” the value of each unit in Physical Space will output in the next epoch. And the firing strength determined by the similarity to the activated block is introduced to classify the percentage in the output of each unit. The MFCMAC adjusts the activated block’s weights according to the current tracking error and outputs the updated weights in the next epoch; thus, the activation and control error will in turn affect the control error in the next epoch. In MIFCMAC, the activation information and the control error are combined by the fuzzy inference scheme and implemented by fuzzy inference controller. Since the activation is decided by the input variable, we can replace the activation information with the input information and infer the control quantity of fuzzy inference controller using the input variable and the control error. Since it is impractical to obtain the control rules generated by experts and the input and output fuzzy sets do not have a clear definition, the MIFCMAC matches the input variable to the antecedent and the control error to the consequent to infer the control quantity of fuzzy inference controller. Meanwhile, the fuzzy inference controller can have the learning capability.
The fuzzy inference controller is composed of fuzzifier, inference engine, rule base, and defuzzifier (Figure 2). It maps the crisp set to the fuzzy set with the singleton fuzzifier in MIFCMAC and inputs it to the inference engine. The inference engine takes advantage of the activated antecedents that MFCMAC has activated to fulfill the fuzzy inference work. The output fuzzy set will be transferred to the actual needed crisp output by using defuzzifier. In the most applications, the generalization ability of CMAC is used as a dynamic selection rule base. In MIFCMAC, however, note that the input and output fuzzy sets are not defined clearly, and there is no one-to-one correlation between the input fuzzy set and the output fuzzy set. Therefore, the MIFCMAC uses the generalization of MFCMAC to activate the corresponding antecedents instead of a few certain fuzzy rules, and the activated fuzzy antecedents will map to all the consequents of the output fuzzy set (Figure 1). Every mapping process can be seen as an IF-THEN statement.
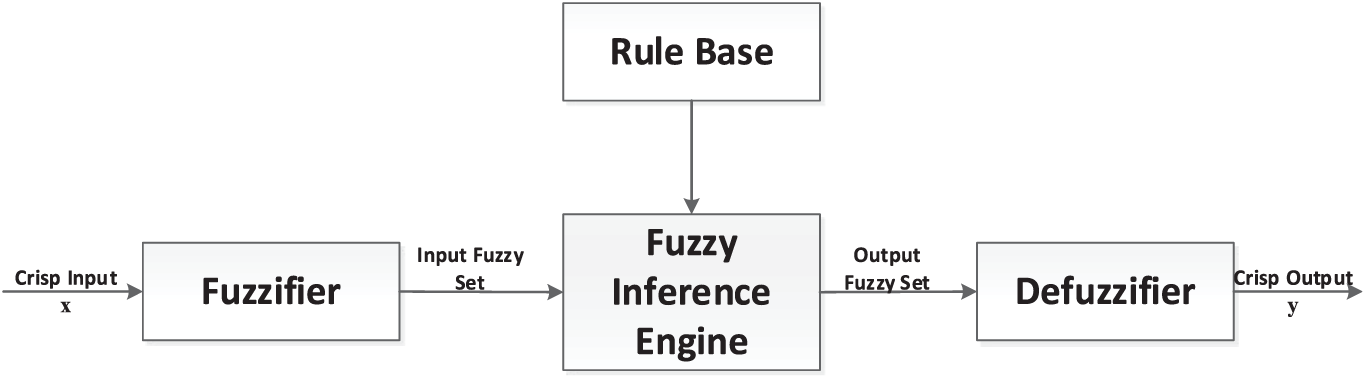
Structure of fuzzy inference controller.
For the IF-THEN statement “if x is A, then y is B” where x ∈ X, y ∈ Y, A represents the antecedents and B represents the consequents. There is a membership function called
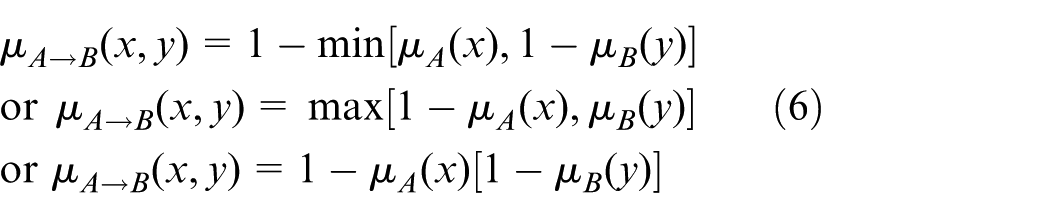
where

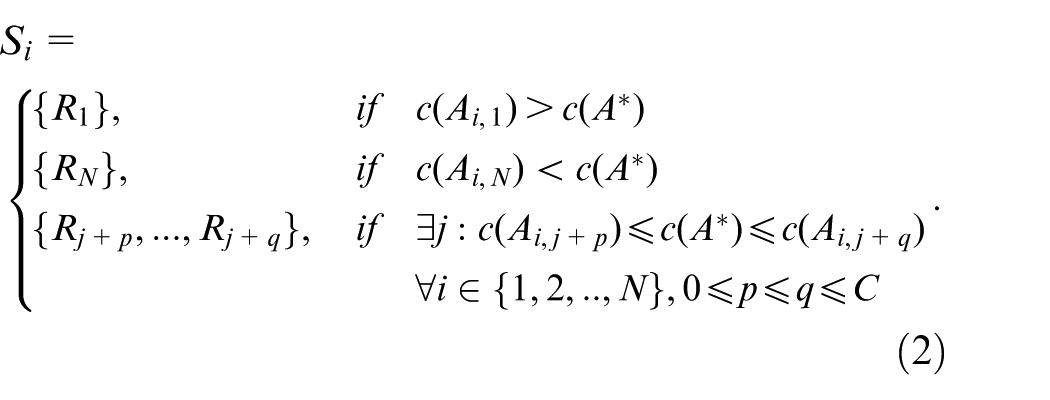
In this paper, we choose the input fuzzy sets and the output fuzzy sets which are the same as the Associative Space in FCMAC. Therefore, the activated rule of the antecedents in the fuzzy inference controller is the same as the rule of the units activated in FCMAC.
Figure 1 depicts that an activated antecedent will map to all the consequents in the output fuzzy set. For a certain activated antecedent, there will be N activated fuzzy rules where N is the number of the consequents. Consider the General Modus Ponens, article n of the fuzzy rules in the multidimensional case can be described as the following form
where the ith dimension of the N-dimensional input can be fuzzified into a fuzzy set

According to the formula mentioned above and the inference rules defined in equation (8), equation (9) could be rewritten as follows

Consider the separable membership function
So equation (10) could be rewritten as follows
Choose the simplest implication relation which is also commonly used in the industrial field

According to singleton fuzzifier

So equation (12) could be rewritten as follows
Using Gaussian consequent membership function,

The height defuzzifier is usually used when there are only certain fuzzy rules are activated. While in this paper, only certain antecedents are activated and they will activate all the consequents in the output fuzzy set. Thus, the traditional form of height defuzzifier is difficult to meet the control demand. As a result, we modify the traditional height defuzzifier
where K is the adjusting parameter which is adopted to amend the imprecision introduced by the height defuzzifier and the coupling parameter is adjusted between MFCMAC and the fuzzy inference controller.
Consider that traditional fuzzy inference does not have the built-in learning capability 18 and MIFCMAC have matched the tracking error to the output fuzzy set, we can rewrite the form of the modified height defuzzifier so that it can obtain the learning capability and calculate the output of the fuzzy inference controller in each epoch
where
Modeling of electrical load simulator
Electric load simulator is widely used in the simulation of the aerodynamic hinge moment during the flight testing under laboratory conditions. 33 It will greatly shorten the development cycle, save research funds and improve the reliability for its convenience, flexibility and repeatability.
Figure 3 shows the hardware platform of electric load simulator in the laboratory, which consists of a DC brushless torque motor, a host computer, a processor board DSP28335, a motor driver, an actuator and so on. In actual loading process, the actuator is in mechanical connection with the load simulator, and they are coupled. The actuator reciprocates according to certain position instruction. The electric loading system follows the actuator as it is connected to the actuator by a four-bar linkage mechanism. Meanwhile, the host computer provides torque loading instructions to the torque motor driver, which drives the torque motor to output torque. The torque sensor feedbacks the torque signal to the host computer to form the torque closed-loop system.
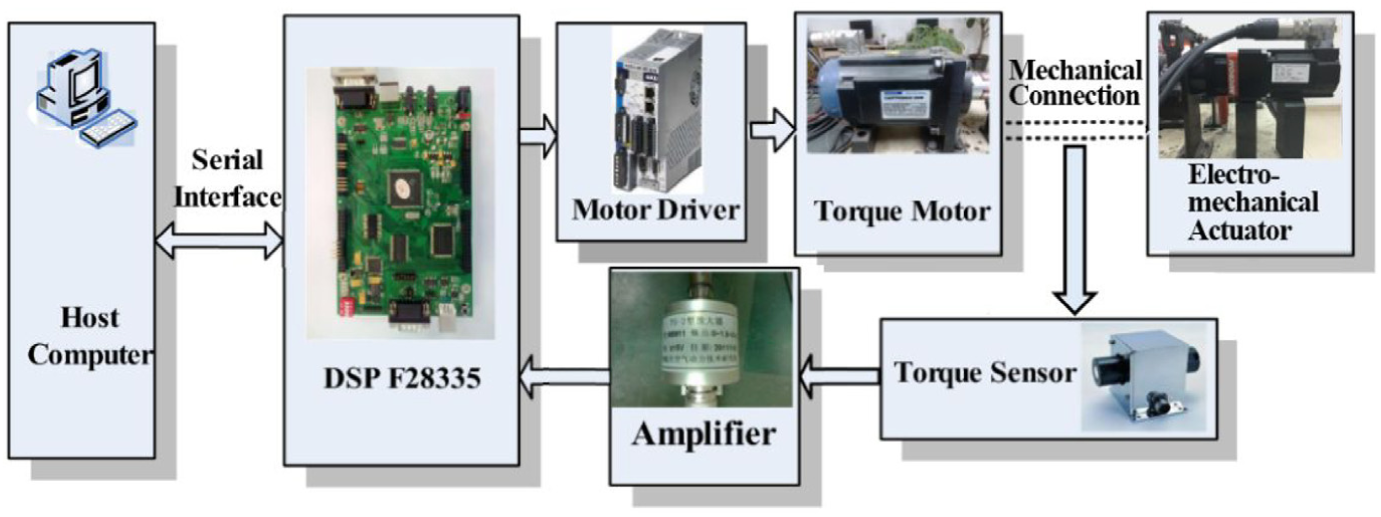
Block diagram of electric load simulator.
As a typical passive loading system, the electric load simulator is disturbed by surplus torque generated on the shaft when the loading instruction is zero and no compensation or control measures are taken. 34 The definition of surplus torque is as follows: The torque output of electric load simulator caused by the motion of actuator, namely the value of surplus torque, equals the output value of electrical load simulator caused by the motion of actuator when the instruction torque is set at zero. Therefore, when modeling the load simulator system, it is necessary not only to consider the performance of the load simulator but also to consider the influence of the actuator.
Moreover, since the electric load simulator is a nonlinear system, the accurate mathematical model is hard to be obtained which makes it difficult for the conventional control method to achieve satisfactory control effect. 35 In this paper, MIFCMAC is applied to the torque tracking of electric load simulator both in simulation and in experiments.
In general, the simulation model of electric load simulator can be described in Figure 4.

The simulation model of electric load simulator.
Then, we obtain the transfer function

where
The uncertain parameters are identified by use of the genetic algorithm in the mathematical model of electric load simulator. 32 The transfer function of electric load simulator can be then expressed as follows

Simulation results
A comparative simulation is analyzed to verify the MIFCMAC control strategy. First, the tracking capability of MIFCMAC is tested. A comparison between MIFCMAC and conventional CMAC is given under static loading, that is, when the actuator is stationary. Then, their suppression effects is tested on surplus torque. Finally, the role of each part of MIFCMAC is analyzed in the tracking in detail. The simulation parameters are listed in Table 1.
Design parameters of controllers.
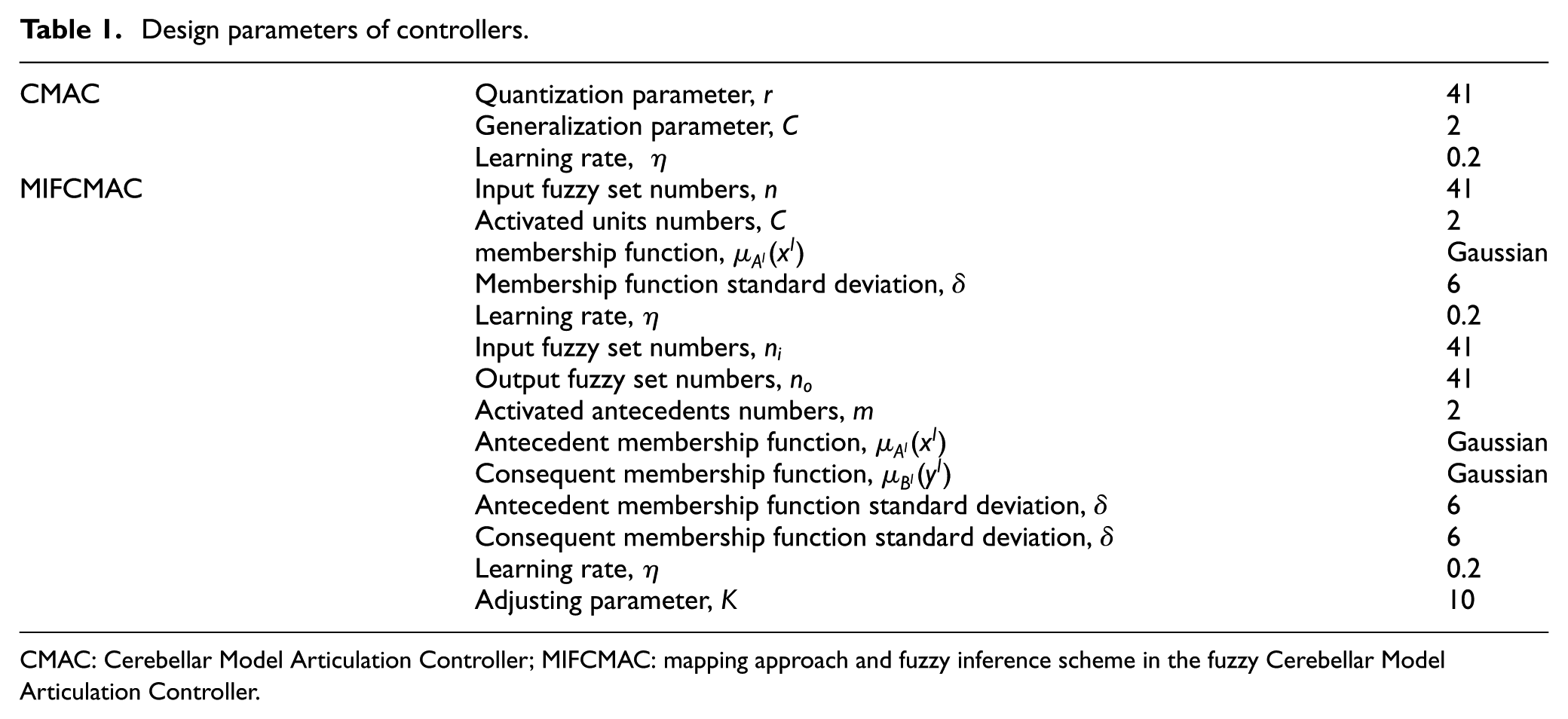
CMAC: Cerebellar Model Articulation Controller; MIFCMAC: mapping approach and fuzzy inference scheme in the fuzzy Cerebellar Model Articulation Controller.
The instruction torque follows the form of
Approximation process
The following simulation results are given to analyze the control effect of MIFCMAC under static loading. In this case, the actuator is stationary and there is no surplus torque. Static loading is mainly used to investigate the control capability of the loading system and it is also a prerequisite for dynamic loading of the electric load simulator. Figures 5 and 6 present the tracking errors of conventional CMAC control strategy and the MIFCMAC control strategy under static loading, respectively.
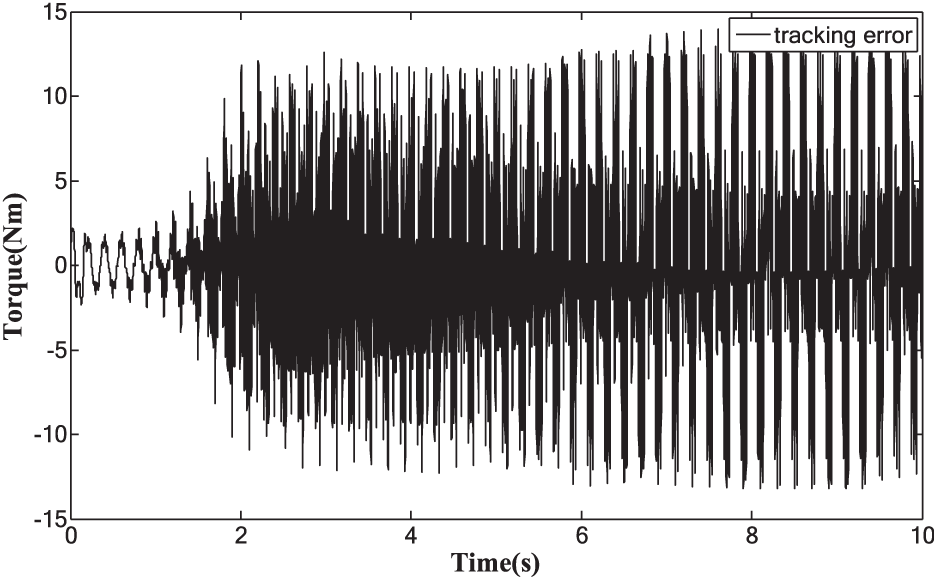
Tracking error of conventional CMAC.
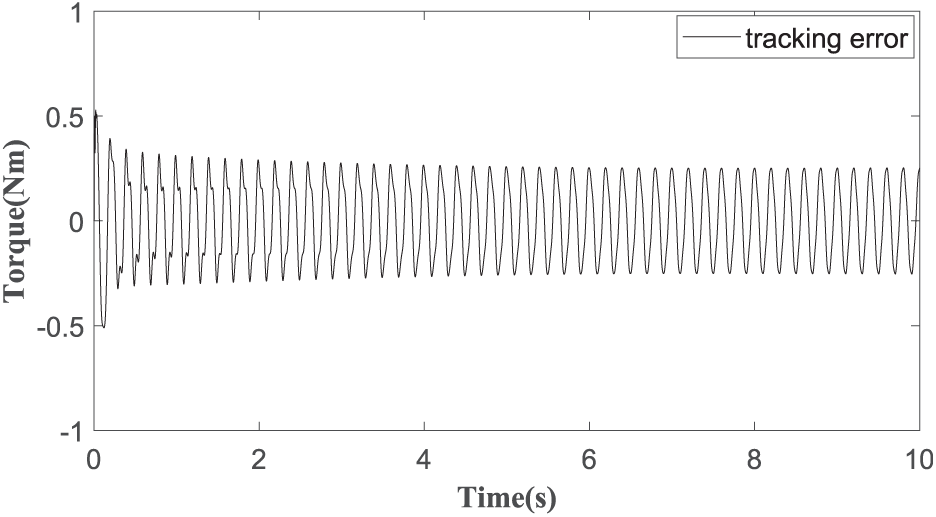
Tracking error of CMAC applying the new mapping approach and fuzzy inference.
Figure 5 shows that the conventional CMAC appears a convergent trend within 1 s; however, it diverges after 2 s and the maximum of absolute error diverges almost to near 15 N m in 10 s. Figure 6 depicts that the tracking error of MIFCMAC makes a rapid convergence to near 0.25 N m and does not diverge during the rest of the simulation time. And the tracking error stays convergent near 0.25 N m. The tracking results show that MIFCMAC control strategy can achieve good control effect.
Based on the static loading simulation results, we also conduct a long period simulation test to observe the value variations of CMAC weight and further guarantee the stability of the proposed control strategy. The results are shown in Figure 7. The values of CMAC weight can keep stable variation in a certain range and the tracking error shows no divergence.
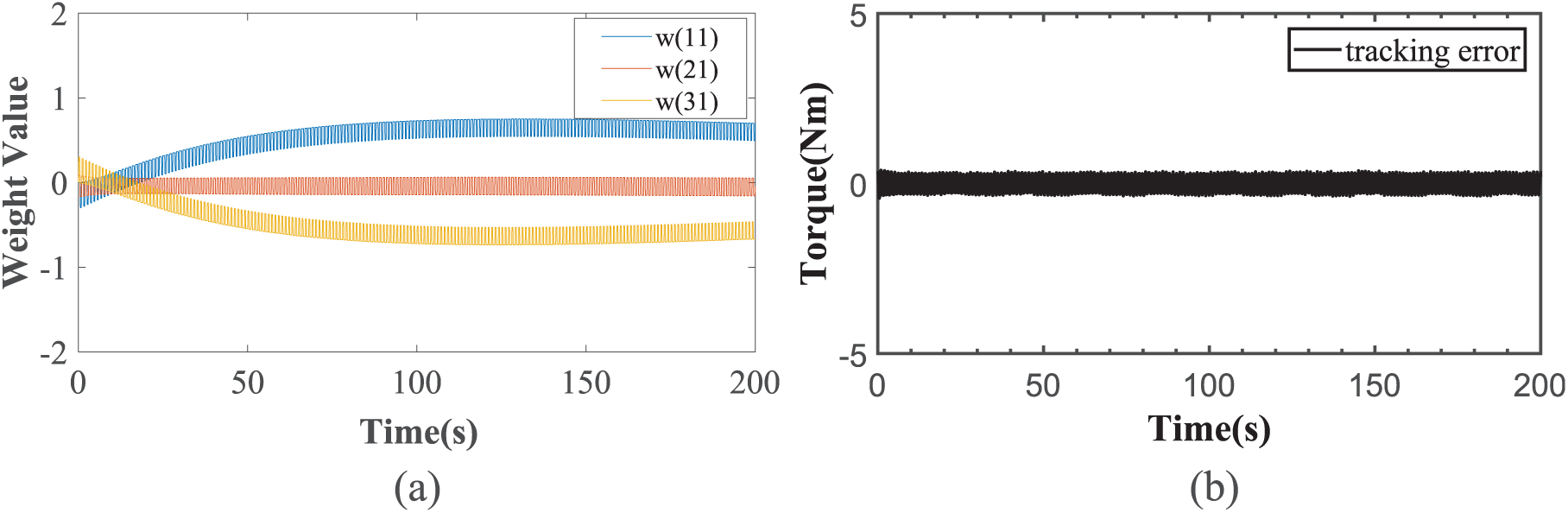
Variation of weight values in MIFCMAC: (a) variation of weight values and (b) curve of the tracking error.
Surplus torque suppression
Based on the simulation results of approximation process and to further verify the system performance under dynamic loading, the suppression capability to the surplus torque is tested. The suppression of surplus torque is usually evaluated by the percentage of eliminated surplus torque.
In the following dynamic loading simulation, the actuator generates a sinusoidal signal in the form of r =5sin(2πf·t) N m, where f = 1 Hz and the instruction torque is set to zero. The comparison of surplus torque before and after compensation is shown in Figure 8.
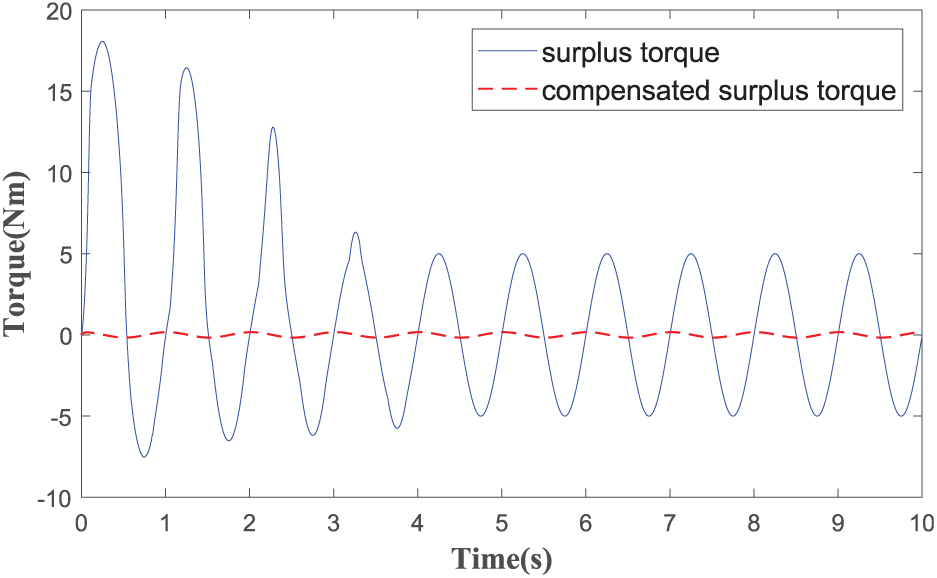
Surplus torque comparison.
Figure 8 shows the amplitude of surplus torque is large and reaches to near 17 N m in the initial period and near 5 N m during the stable period without the control strategy. Under the control of MIFCMAC, the amplitude of surplus torque decreases to no more than 0.17 N m. The suppression capability to surplus torque reaches 96.6%.
The same actuator signal is kept as above, and the instruction torque follows the form in section “Simulation results.” The output of electric load simulator is tested under dynamic loading and the tracking error is shown in Figure 9.
Tracking error under dynamic loading.
Figure 9 depicts that the tracking error is large in the initial period but makes the convergence to near 0.30 N m. The amplitude of the tracking error increases compared with that under the static loading, but it can still remain within a steady range. The effect of the surplus torque on the tracking error is approximately within 5%. On the whole, the output signal can maintain the similar steady performance with that in section “Approximation process” when the surplus torque exists.
The differences between MIFCMAC control strategy and conventional CMAC control strategy are compared with the same instruction torque signal and the same actuator signal. The tracking error curves are shown in Figure 10. The tracking error of MIFCMAC is significantly smaller than that of conventional CMAC under dynamic loading. Moreover, the changing process of tracking error is smoother when MIFCMAC control strategy is adopted, which has certain significance in protecting the mechanical structure in practical application.
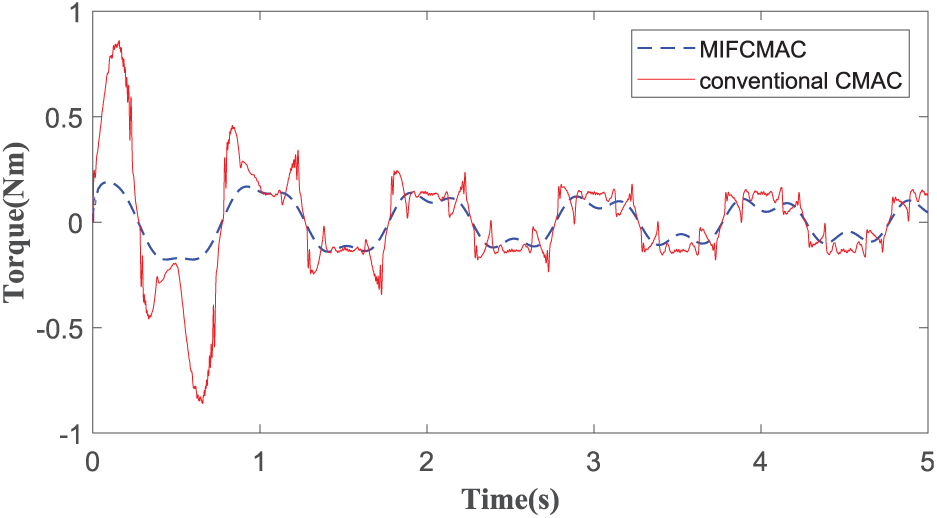
Tracking error comparison.
Further analysis of MIFCMAC
To analyze the feasibility of MIFCMAC, a further analysis is made. First, the control effect of MFCMAC and fuzzy inference controller is analyzed. The output of MFCMAC and fuzzy inference controller is shown in Figure 11.
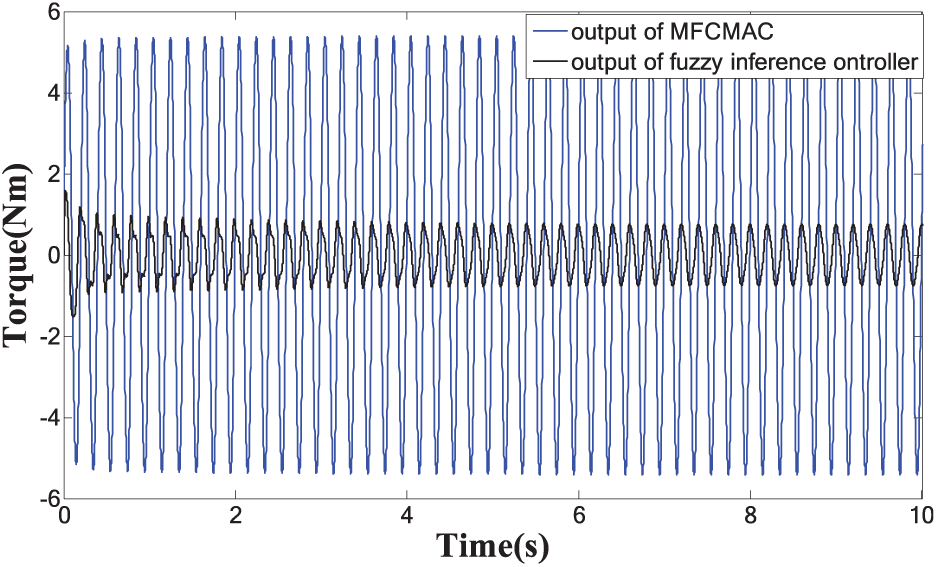
The output of FCMAC and fuzzy inference controller.
Figure 11 proves that MFCMAC acts as a main controller in the loading process, while the fuzzy inference controller helps to assist the control process. At the initial stage of the loading process, the weight units in MFCMAC need further training. Thus, the output of the fuzzy inference controller dominates at the initial loading process. Since the weight adjusting process goes quickly and most of the weight units finish their initial learning, the output of the fuzzy inference controller shows a decreasing trend while the output of MFCMAC increases. And as the weight learning process goes deeper, both the fuzzy inference controller and MFCMAC gradually become stable and the fuzzy inference controller plays the role of compensator.
If we delete the output of the fuzzy inference controller from the control quantity, the control effect is shown in Figure 12.
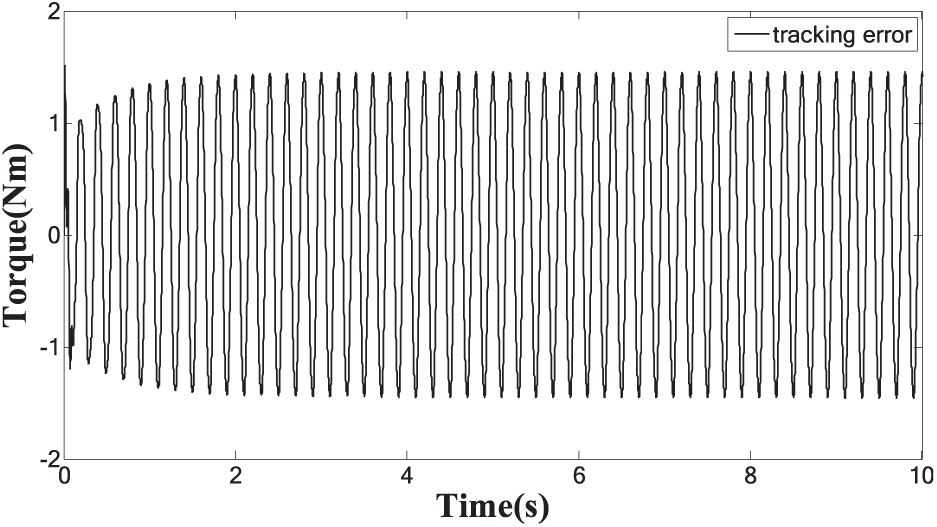
Tracking error without the fuzzy inference controller.
The tracking error shows a divergent trend at first of the loading process but quickly increases to a new equilibrium. Compared with the tracking error of MIFCMAC in Figure 6, the steady-state amplitude of tracking error in Figure 12 is almost six times of that in Figure 6. The tracking error does not diverge but maintains the convergent state at a larger amplitude. And such result verifies the contribution that the fuzzy inference controller has made to the whole control. Although the MFCMAC have the capacity to guarantee the system convergence, the tracking precision cannot be guaranteed by the MFCMAC alone and requires the fuzzy inference controller to complement.
Both MFCMAC and the fuzzy inference controller play the irreplaceable role in the control process. MFCMAC is the main controller and acts as the assurance for the convergence of the torque tracking. The fuzzy inference controller is used to compensate the MFCMAC’s control quantity to eliminate the steady-state tracking error.
Experimental results
In the actual electric loading simulator system, friction, dead zone and mechanical clearance are unavoidable due to the four-link mechanical structure between the electric load simulator and the actuator. Meanwhile, with the influence of surplus torque, the robustness and practicability of control strategies can be well verified. And to verify the feasibility of MIFCMAC, the loading experiment is conducted on the test bed of electric load simulator in the laboratory. The block diagram and the control parameters are described in section “Modeling of electrical load simulator.” The instruction torque is
Torque loading experiment
Figure 13 shows the tracking curves when the loading frequencies is set at 1 and 2 Hz, respectively. The tracking error is equal to the difference between the instruction torque and the actual torque. When the frequency increases, the tracking error can maintain the convergence tendency. Meanwhile, the maximum value of the tracking error at the same moment is bigger at 2 Hz than that at 1 Hz as a result of the learning rate.
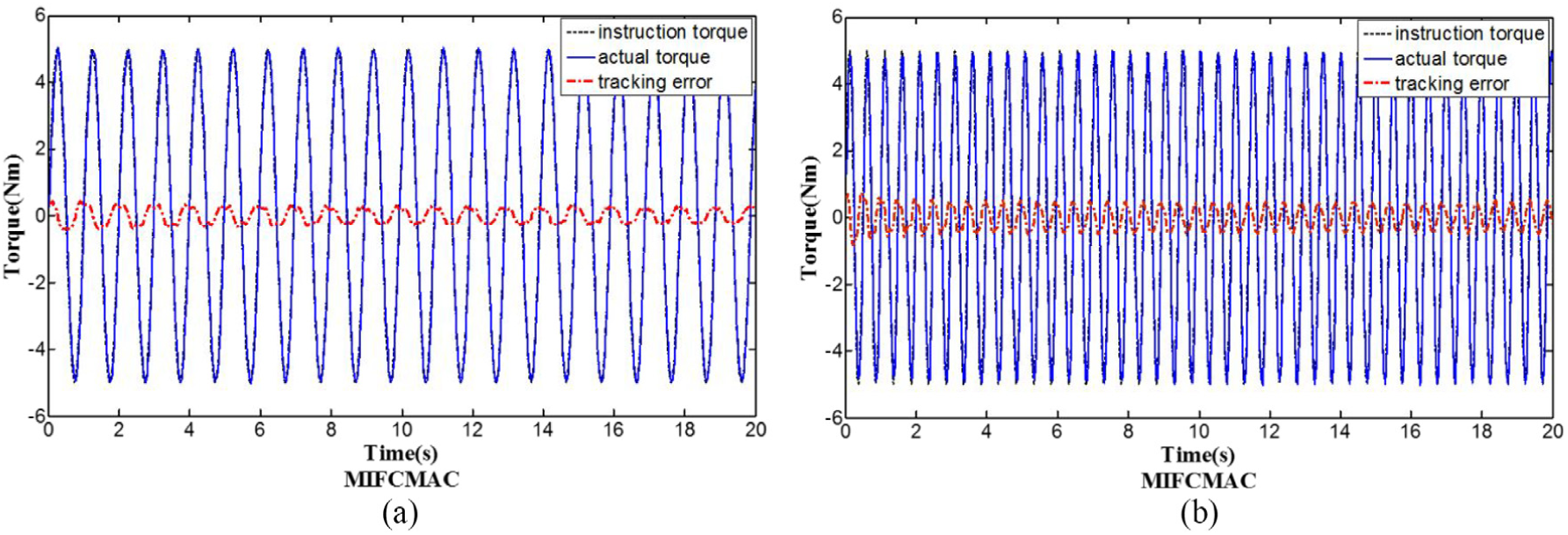
Tracking curves when instruction torque signal is 5 N m at (a) 1 Hz and (b) 2 Hz.
In the actual system, the stability cannot be proved theoretically as a result of parameter uncertainties and external disturbances. A long-term loading experiment of MIFCMAC is conducted to test the stability of the proposed approach. The instruction torque is
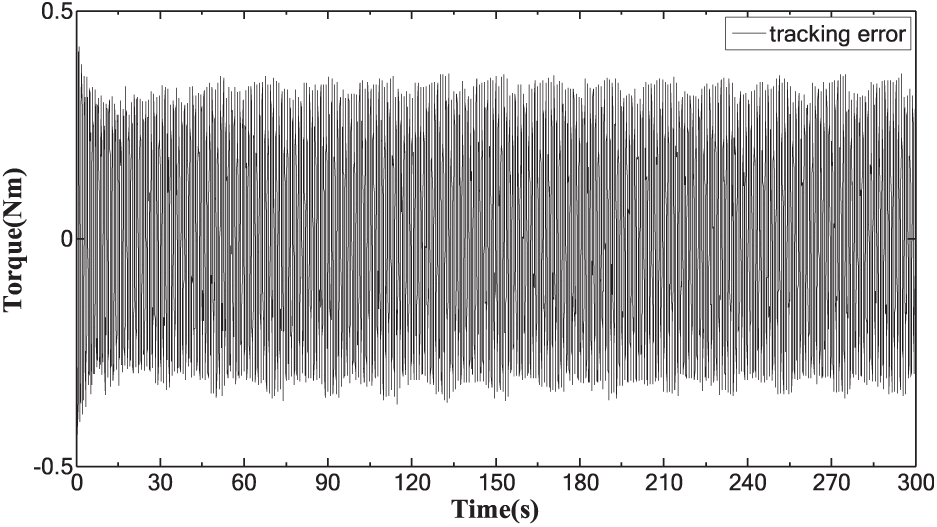
Stability test of MIFCMAC.
The same instruction torque is kept and the actuator is started to generate an angular velocity signal to verify the system performance under dynamic loading. Based on the simulation results in section “Simulation results” and the feasibility of the scheme, the sinusoidal actuator torque signal is adopted and the experiment results are shown in Figure 15.
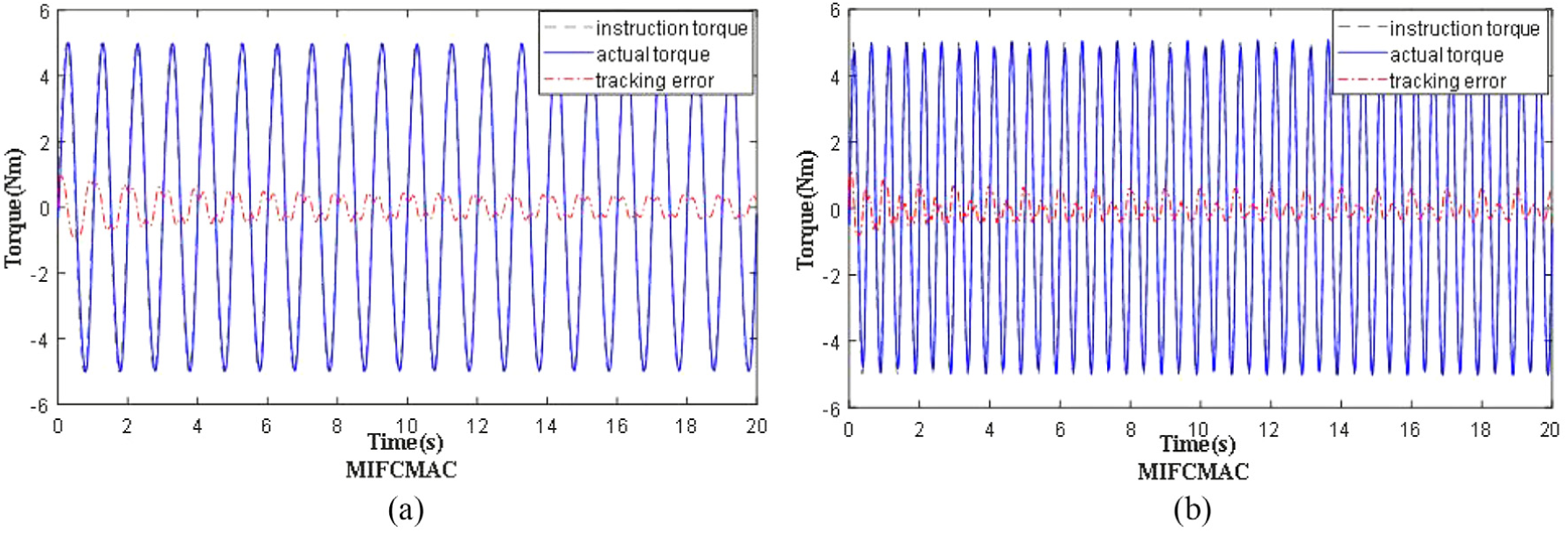
Tracking curves under dynamic loading when instruction torque signal is 5 N m at (a) 1 Hz and (b) 2 Hz.
Intuitively, the dynamic tracking accuracy can be maintained at a high level when the actuator generates the sinusoidal signal. When the frequencies of the instruction torque are 1 and 2 Hz, the tracking accuracy can reach 95%.
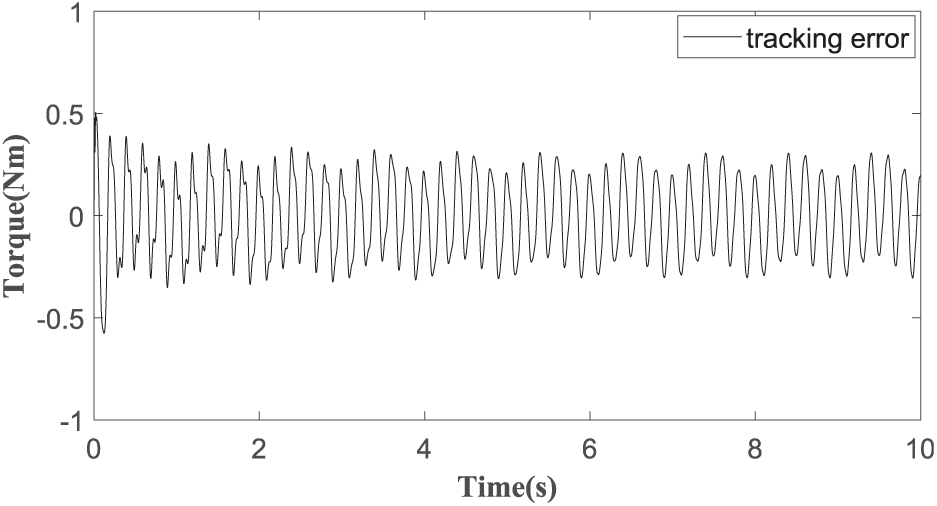
Figure 16 shows that the tracking error can keep its convergence within 3 s and does not exceed 0.5 N m thereafter. It proves that MIFCMAC control strategy works well when the surplus torque exists just as the simulation results.
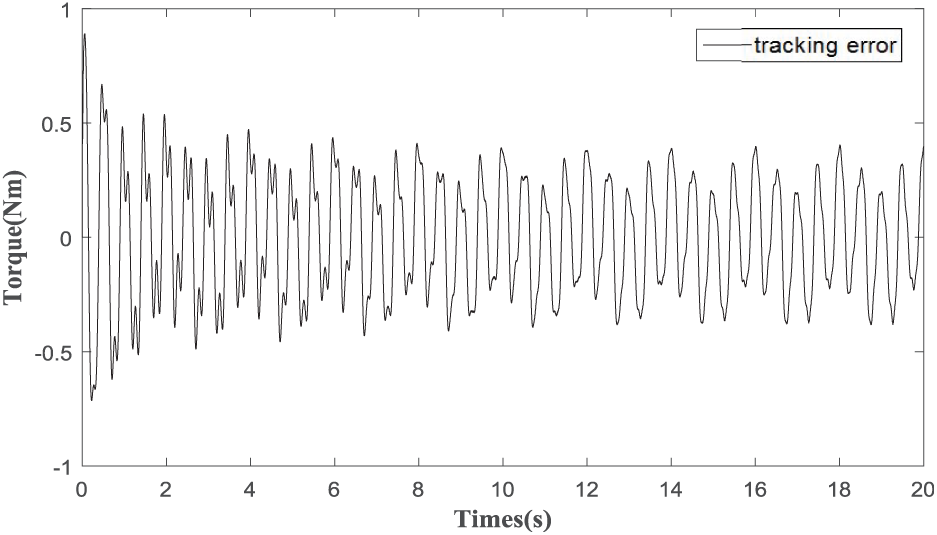
Stability test under dynamic loading.
Compared with the static loading experiment, the initial amplitude of tracking error is larger, but it will converge in a relatively short time and finally maintain in a relatively steady range. In the steady period (after 3 s), the maximum amplitude of the tracking error has a slight increase when the surplus torque is introduced.
Contrastive experiment
A contrastive experiment of fuzzy CMAC-PD and MIFCMAC is done. The instruction signal form and the control parameters are consistent with that in the torque loading experiment. The load frequency is set at 0.5, 1, 1.5 and 2 Hz, respectively.
Figures 17–20 depict the tracking results as the loading frequency increases. On account that both the FCMAC-PD and MIFCMAC adopt the simple one-to-one mapping structure and utilize a gradient descent method to update their weights, they all converge rapidly at the same frequency. However, the local tremor occurs in the tracking process of the fuzzy CMAC as the loading frequency increases, and this situation gets worse especially at 2 Hz. Compared with the fuzzy CMAC, the continuity of activation as well as output between every adjacent epoch has enhanced; thus, the control capability of MIFCMAC has improved and the tracking error of MIFCMAC still stays converged as the load frequency increases.
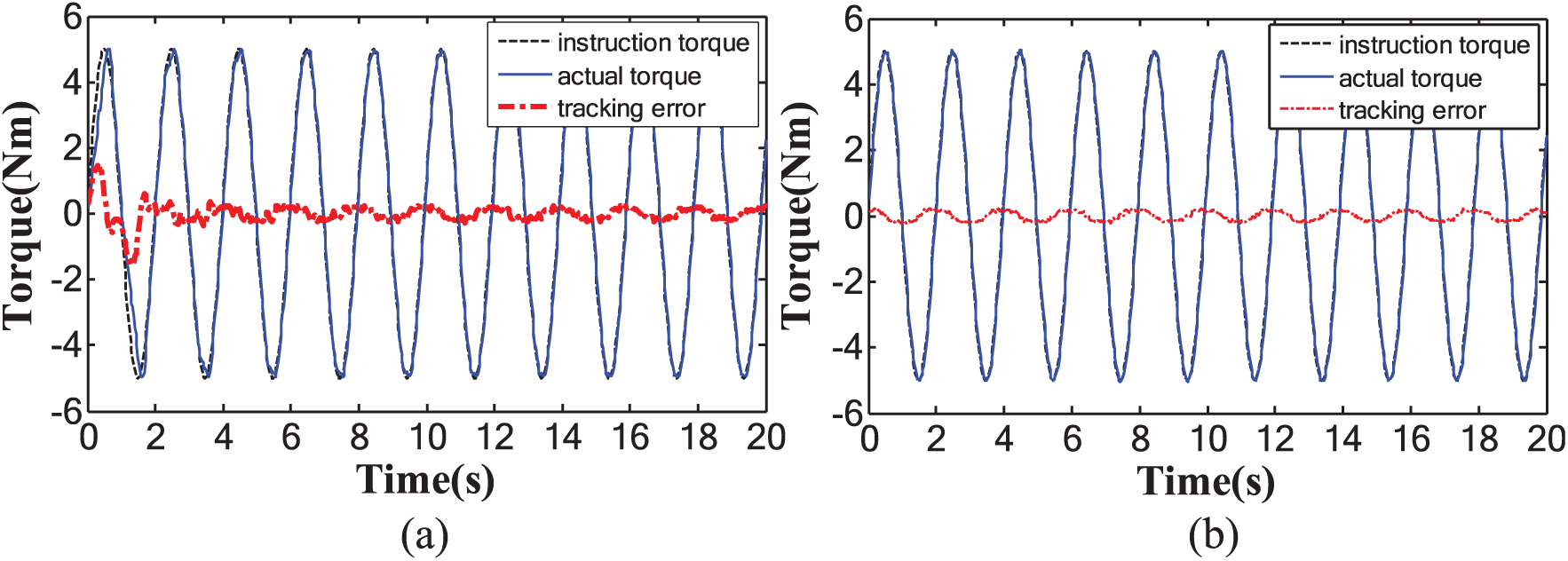
Tracking curves when instruction torque signal is 5 N m, 0.5 Hz: (a) FCMAC-PD and (b) MIFCMAC.
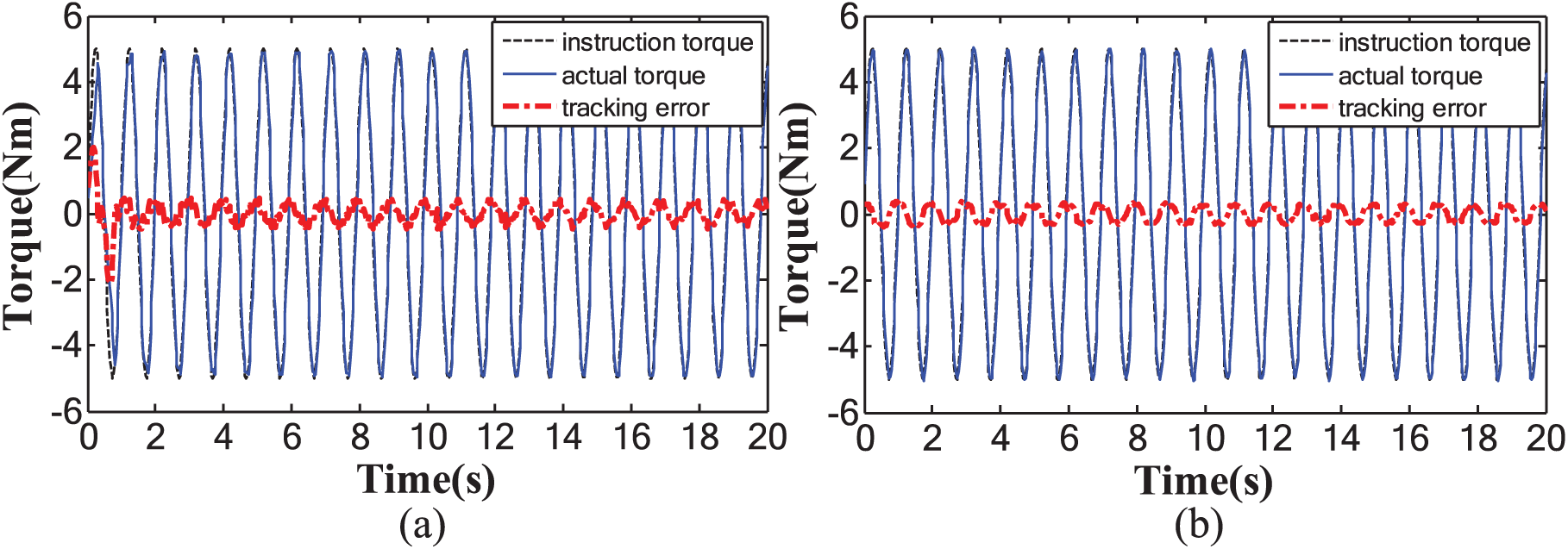
Tracking curves when instruction torque signal is 5 N m, 1 Hz: (a) FCMAC-PD and (b) MIFCMAC.
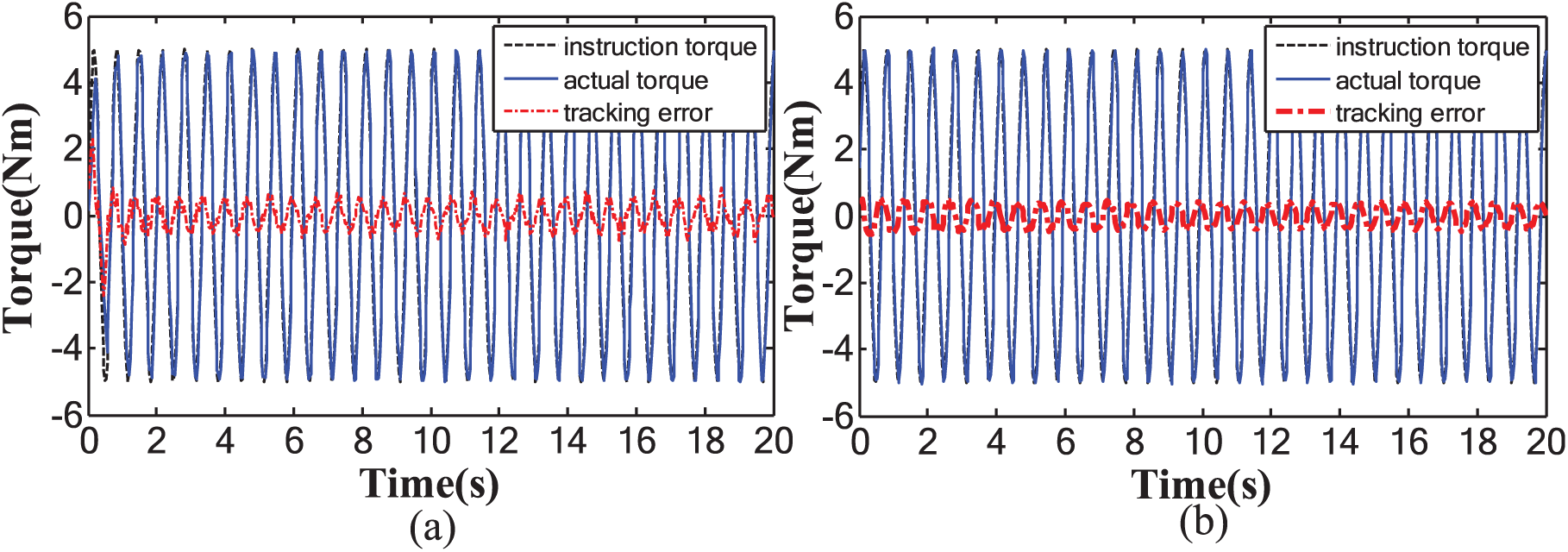
Tracking curves when instruction torque signal is 5 N m, 1.5 Hz: (a) FCMAC-PD and (b) MIFCMAC.
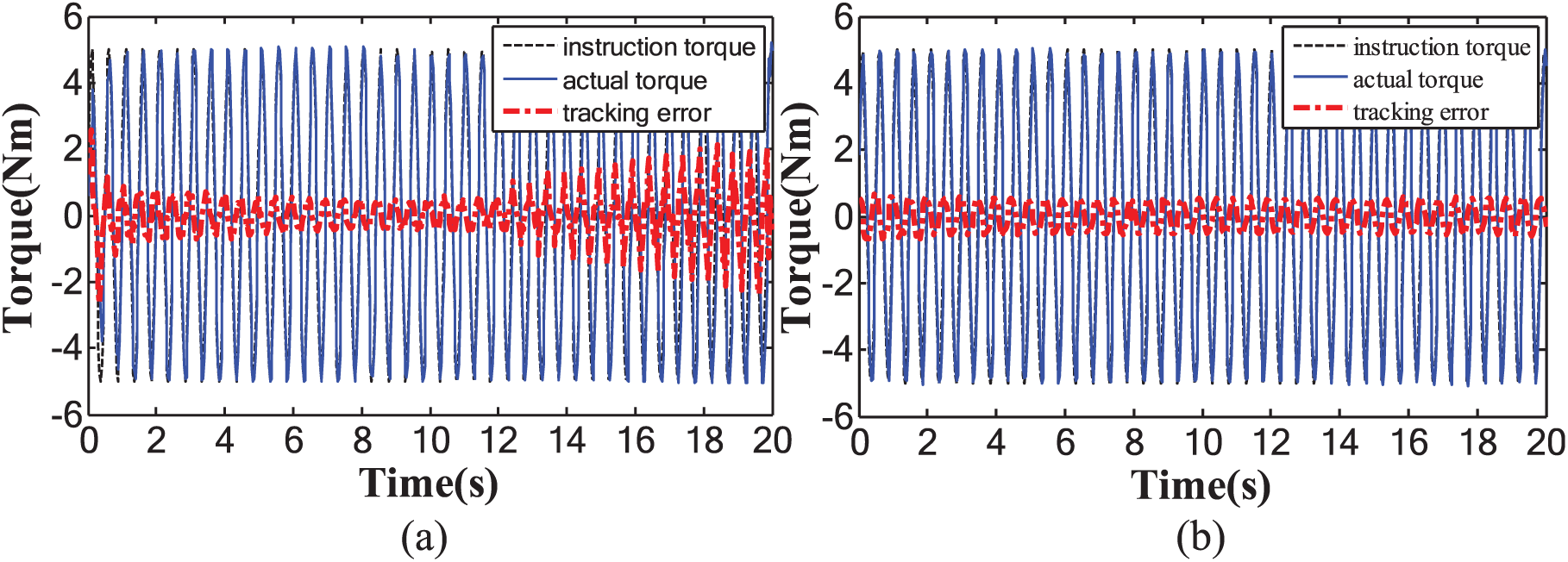
Tracking curves when instruction torque signal is 5 N m, 2 Hz: (a) FCMAC-PD and (b) MIFCMAC.
In our previous works,33,34 we have proposed several control strategies to improve the control effect of electric load simulator. To verify MIFCMAC’s superiority in control effect, we have compared the cycle maximum error of MIFCMAC with the smooth CMAC-PD control strategy and the improved CMAC-PD control strategy. A cycle is defined as one period of the instruction torque signal. For better comparison, the experimental tracking results of three control strategies are recorded in Table 2 when the instruction torque signal is 5 N m at 1.0 Hz. And the root-mean-square error is calculated.
Comparison of cycle maximum errors (N m).
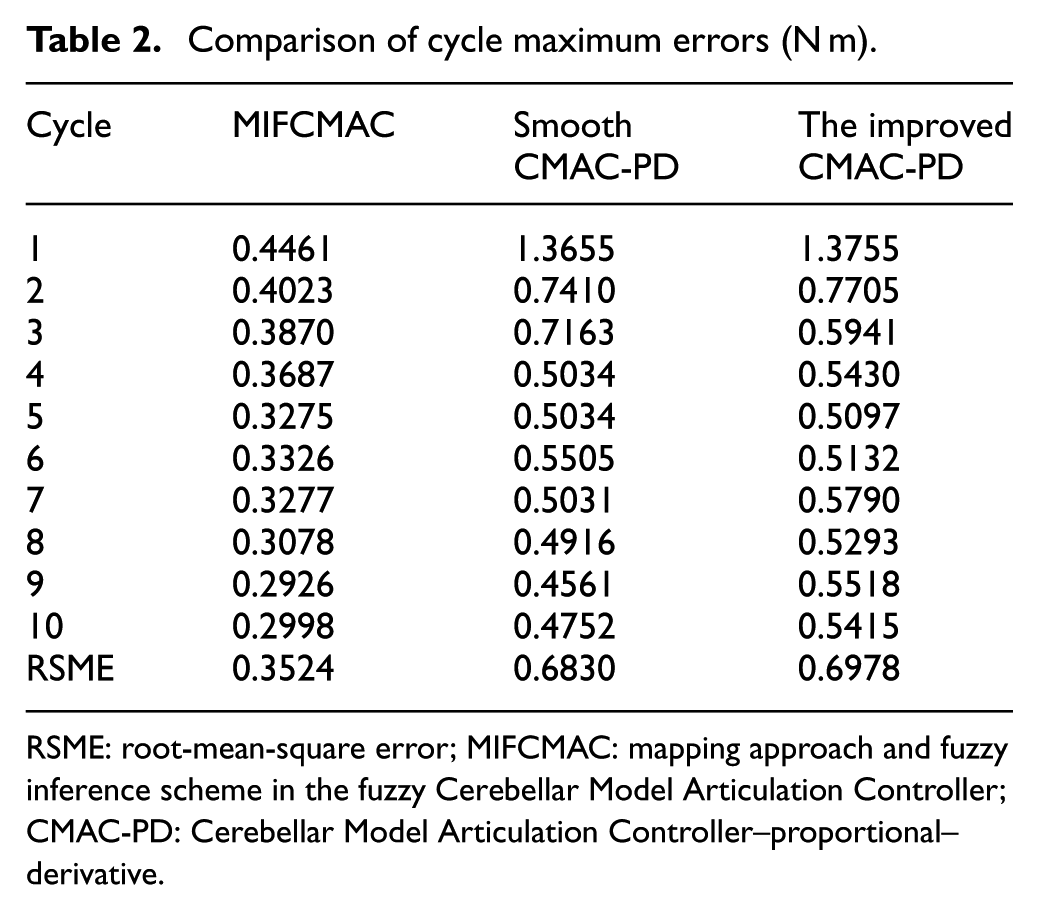
RSME: root-mean-square error; MIFCMAC: mapping approach and fuzzy inference scheme in the fuzzy Cerebellar Model Articulation Controller; CMAC-PD: Cerebellar Model Articulation Controller–proportional–derivative.
Summary of experiments
In the torque loading experiment, the maximum difference of tracking error between static l and dynamic loading conditions during the stable period is less than 0.1 N m (when the instruction torque follows a form of
The nonlinear factors which are difficult to accurately simulate and reproduce in the simulation level, that is, parameter uncertainties and external disturbances in the electric loading simulator system, will have a more obvious impact on the control effect of the control strategy in the experiment. As summarized in the above experiment results, MIFCMAC control strategy has a stable performance in the loading experiment and shows good robustness. There is a promising prospect for MIFCMAC control strategy in industrial application.
Conclusion
We introduced a MIFCMAC controller, which is designed free from mathematical model and successfully used for the torque control of electric load simulator. By using a new mapping approach, the continuity of the proposed MIFCMAC has enhanced. Moreover, only local weights in the Physical Space are updated but all weights are outputted, which makes MIFCMAC actually a global network with local weight updating. Different from the conventional use of the fuzzy inference in the related FCMAC controllers, the fuzzy inference controller mainly uses the fuzzy inference and has the learning capability. Thus, the fuzzy inference controller can compensate the output of MFCMAC. The simulation and experimental results have shown that MIFCMAC can improve the torque tracking precision and keep a stable loading in electric load simulator.
However, our work still has some limitations. We use 1D input in the FCMAC section, and input space X, as described in section “Design of MIFCMAC”, can be multidimensional. When multi-dimensional input is used, it is worth considering how the proposed method can be improved and upgraded to meet the control requirements. For future research work, we will try to combine the latest relative researches to further improve the robustness and reliability of the control strategy.