
Abstract
Leader-following consensus of multi-agent systems with general linear models is investigated via event-based impulsive control approach. Event-based impulsive controller and state-dependent triggering function are designed. Impulsive instants are determined by certain triggering events, that is, impulsive effect performs only at the instants when events occur, and so as controller update. Sufficient conditions on leader-following consensus are proposed by using stability theory of impulsive differential equations, matrix theory, and inequality technique. Zeno-behavior is also excluded for the concerned closed-loop system. Besides, a technique that used the state information of agents only at event instants is proposed to avoid continuous communication among agents. Finally, an example is presented to illustrate the effectiveness of the obtained theoretical results.
Keywords
Introduction
Over the past decades, control problems for networked multi-agent systems have been extensively studied. Multi-agent systems can be potentially applied in such areas as ecosystems, Internet, social networks, and global economic markets. A particular focus is the consensus of multi-agent systems,1,2 which requires all agents to achieve the desired common goal. Many researchers have contributed to this topic.3–7
In recent years, impulsive control problems arise in practical applications, such as orbital transfer of satellites, 8 ecosystems management, 9 stabilization and synchronization of neural networks, 10 and so on. Moreover, impulsive control seems more useful than continuous control, since in some practical problems, such as the control or regulation of savings rates of a bank, the continuous control is impossible and only impulsive control can be used. Due to its variety of applications, interest in impulsive control has grown.11–15 It should be pointed out that most of the existing studies focus on the case that impulsive instants are pre-determined and fixed or only the lower and upper bound of impulsive intervals are given. To ensure the performance of the considered systems, frequency of impulsive effect has to be designed fast enough by taking the worst scenario into consideration, while such high frequency of impulsive effect might not be necessary for achieving the control objective. This partially motivates our study.
On the contrary, event-based control, where event instants are determined by triggering condition and triggering function associated with systems’ states, was proposed for networked control systems due to its advantage in reducing the frequency of controller update and communication between various components/subsystems of control systems. In other words, this control mechanism can improve the usage of limited bandwidth resource. Event-based control for discrete-time multi-agent systems was investigated in Ding et al. 16 and Zhu et al. 17 Some results based on event-based control for continuous-time multi-agent systems were presented in Yi et al. 18 and Li et al. 19 Event-based consensus of multi-agent systems with linear dynamics was investigated in Zhu and Jiang, 20 Cheng and Ugrinovskii, 21 Garcia et al., 22 Yin et al., 23 and Borgers et al. 24
In order to determine impulsive instants dynamically using state information, event-based impulsive control was studied by various researchers, where impulsive instants are determined by certain events. The issue of exponential stability via event-based impulsive control for continuous-time dynamical systems was investigated in Liu et al. 25 The global uniform exponential stability criteria were derived and the Zeno-behavior was excluded. The exponential input-to-state stability under impulsive events for discrete-time impulsive dynamical networks was investigated by Liu et al. 26 An event-based impulsive control scheme (ETI) for differential evolution (DE) was introduced by Du et al. 27 Pinning consensus in networks with time-varying topology and event-based diffusions via impulsive control was studied by Han et al. 28 Via event-based impulsive control approach, the exponential stabilization of continuous-time dynamic systems was investigated by Zhu et al., 29 and the synchronization problem of memristive neural networks was also investigated by obtained results.
In this paper, consensus for leader-followers multi-agent systems is investigated. The novelties of this paper lie in the following. (1) Event-based impulsive control approach, which can reduce the cost of information exchange and controller update, is used to study leader-following consensus problem. The controller update instants and impulsive instants are determined by the appropriately designed triggering function and triggering condition. (2) Not only leader-following consensus for the considered systems can be achieved, but also the Zeno-behavior can be excluded under the designed event-based impulsive controller. (3) To avoid continuous communication among agents, a novel technique using the state information of agents only at event instants is provided. Besides, an example is presented to illustrate the effectiveness of the obtained theoretical results.
Preliminaries
Notations
For
Graph theory
The communication topology among these agents can be represented by a digraph (directed graph)
Problem formulation
Consider the following linear leader-followers multi-agent systems

where
Event-based impulsive controller for agent

where
Impulsive instants and the controller update instants

where

is said to be the triggering function, where
Remark 1
Different with the research results,13,14,25,29 the event-based impulsive control, where impulsive instants and controller update instants
Definition 1
The multi-agent systems (1) is said to achieve leader-following consensus under some designed event-based impulsive controller

holds for any initial conditions.
Definition 2
The closed-loop system does not exhibit Zeno-behavior if
Because

Let

Denote

where
Therefore, leader-following consensus of equation (1) is achieved if and only if
Main results
First, we will proof that there is no Zeno-behavior in the closed-loop system. Then, we will give the consensus conditions.
Theorem 1
Consider the leader-followers multi-agent systems (1) with event-based impulsive controller (2), where impulsive instants sequence
Proof
Computing the upper right-hand Dini derivative of
Since there is a spanning tree with the leader as the root in digraph
Then, invoking equation (8), one can derive that
It follows from

Next event will not be triggered until triggering function (4) crosses zero, that is,
Lemma 1
Let
Lemma 2
Let

where
If

2. If

Lemma 3 (Gronwall’s Inequality)
Let a nonnegative continuous function

where

Theorem 2
Consider the leader-followers multi-agent systems (1) with event-based impulsive controller (2), where impulsive instants sequence
For

2. For

Proof
By Theorem 1, we have
By the definition of triggering function

The solution of (7) can be represented as follows

where

Case I: For
By Lemma 2 (equations (12) and (13)), we have
Let
that is

where

Thus, invoking equation (10), there is a positive constant

Case II: For
By Lemma 1, Lemma 2 (equations (11), (13), (14)) and following a similar procedure as for case I, we can show that there exits a positive constant

Therefore, it follows from equations (17) and (18) that the consensus of the closed-loop system (1) with controller (2) can be achieved.
Remark 2
Theorem 2 shows that whether
As a matter of fact, if (A, B) is stabilizable and the communication topology of agents has a directed spanning tree with the leader as the root, then there is a matrix
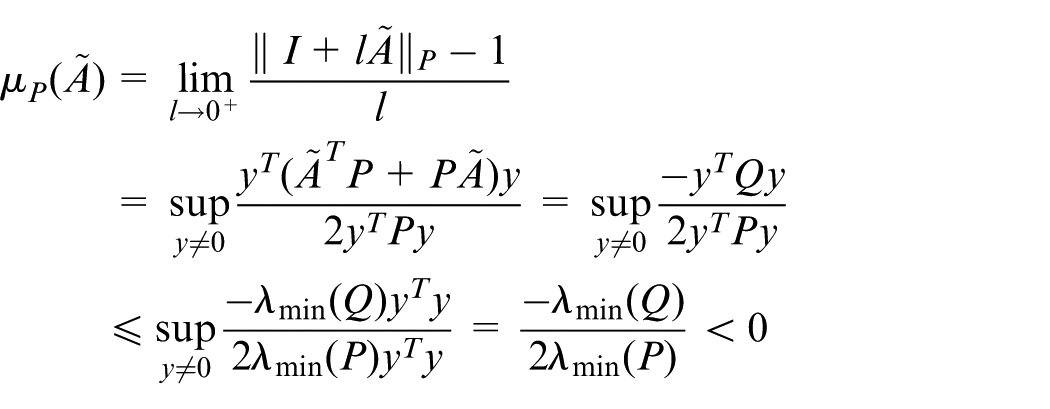
which implies that if
Remark 3
It should be pointed out that in order to monitor triggering condition (3) to computing
Theorem 3
Assume that the conditions in Theorem 2 are satisfied and impulsive instants

Then, leader-following consensus of the closed-loop control systems (1) with (2) can be achieved. Furthermore, there is no Zeno-behavior for the concerned closed-loop control system.
Proof
In fact, by the proof of Theorem 1, we have

By equation (20) and the definition of

Then, by Theorem 2, we can get that leader-following consensus of the closed-loop control systems (1) with (2) is achieved. And it is obvious that there is no Zeno-behavior in the closed-loop system. The proof is completed.
Simulation example
In this section, we will give one example to illustrate the feasibility and effectiveness of theoretical result obtained in previous section.
Consider leader-followers multi-agent systems (1) with five followers, and
Assume that

It is clear that

In fact,

and
The simulation results with initial conditions
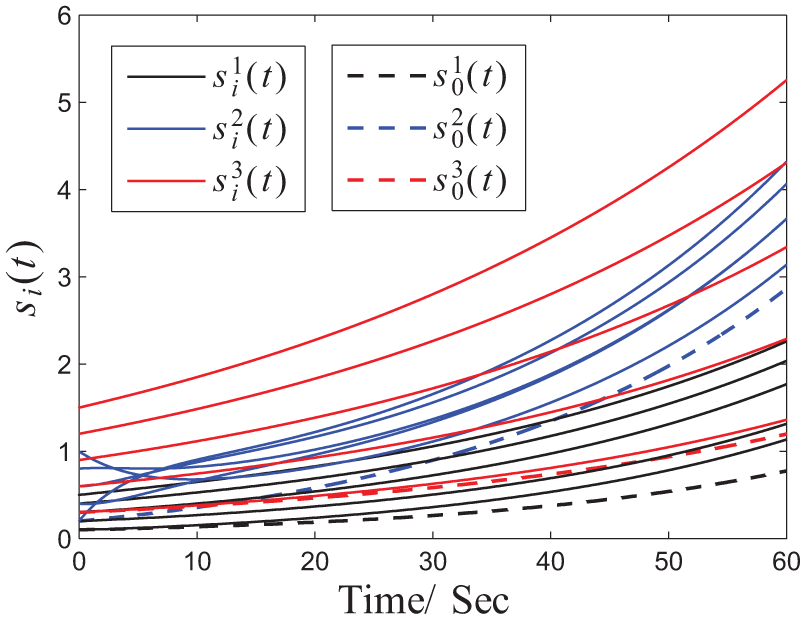
States of agents (leader and followers) without impulsive.
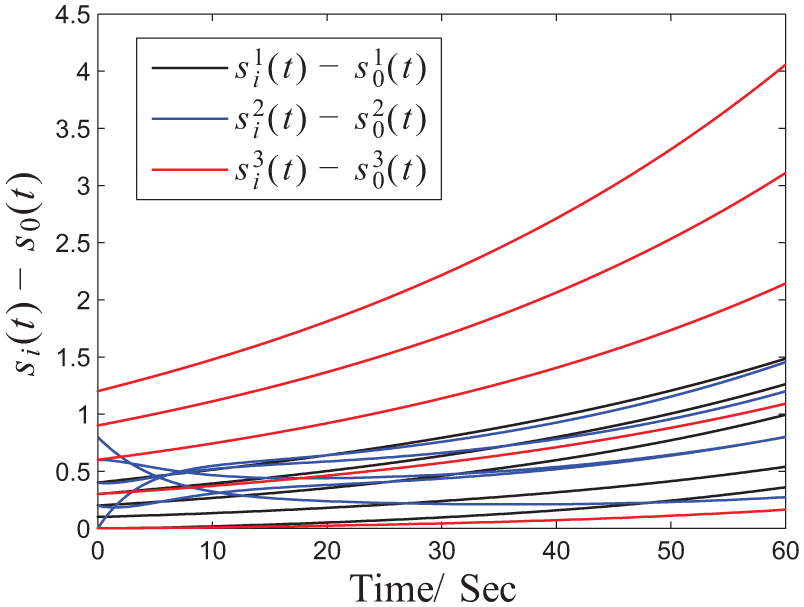
Consensus error between leader and followers without impulsive.
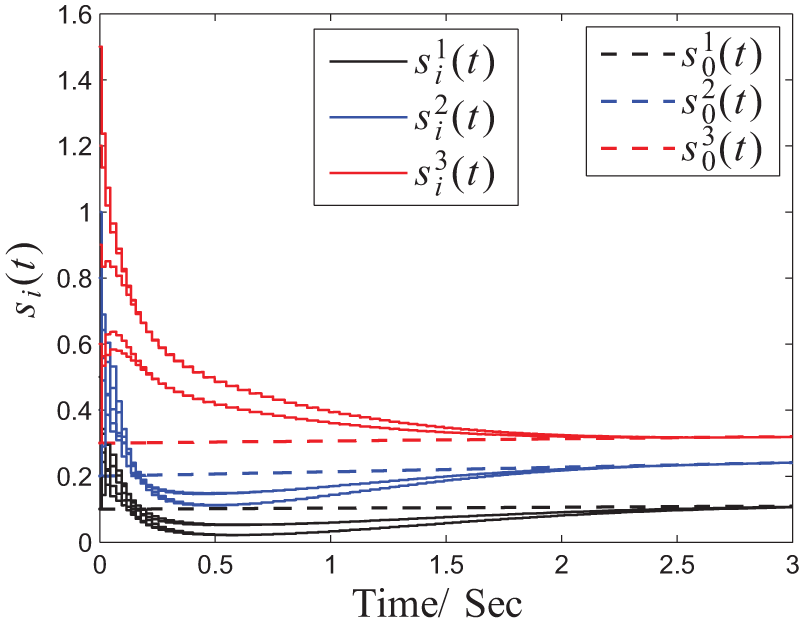
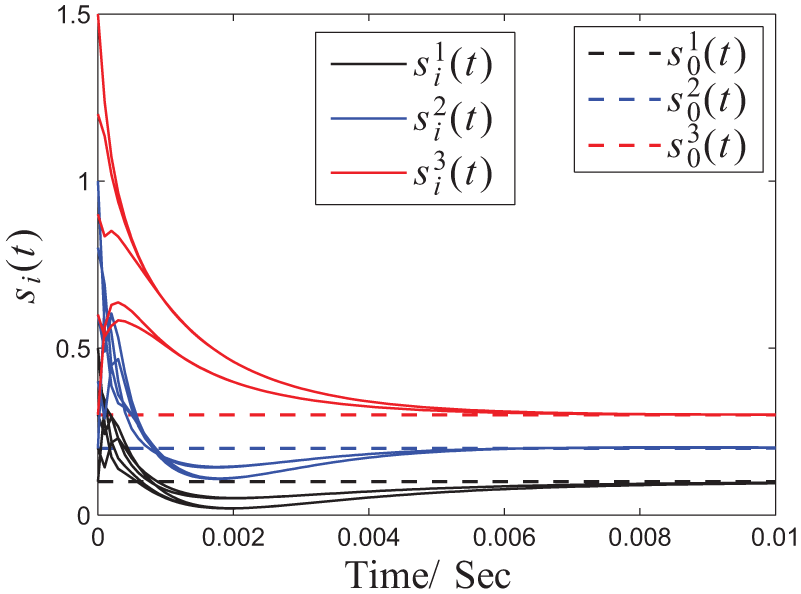
States of agents (leader and followers) with impulsive (Theorem 2).
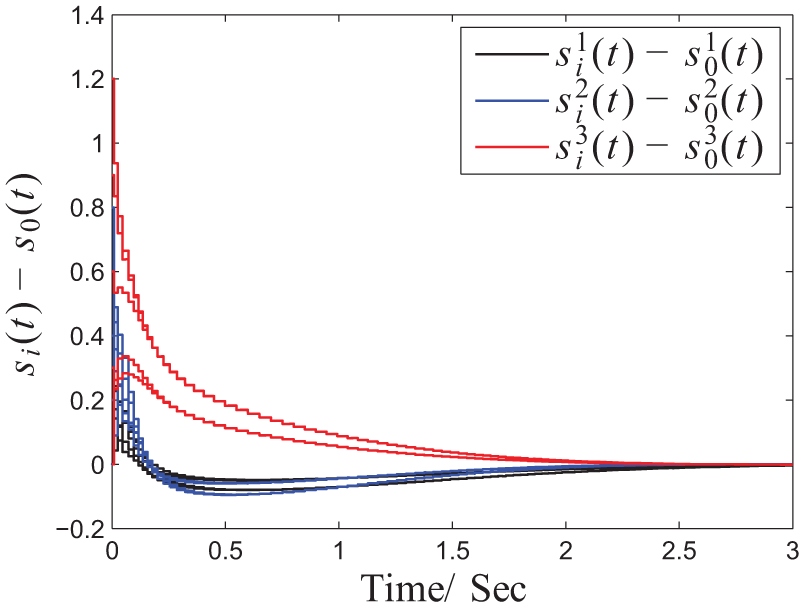
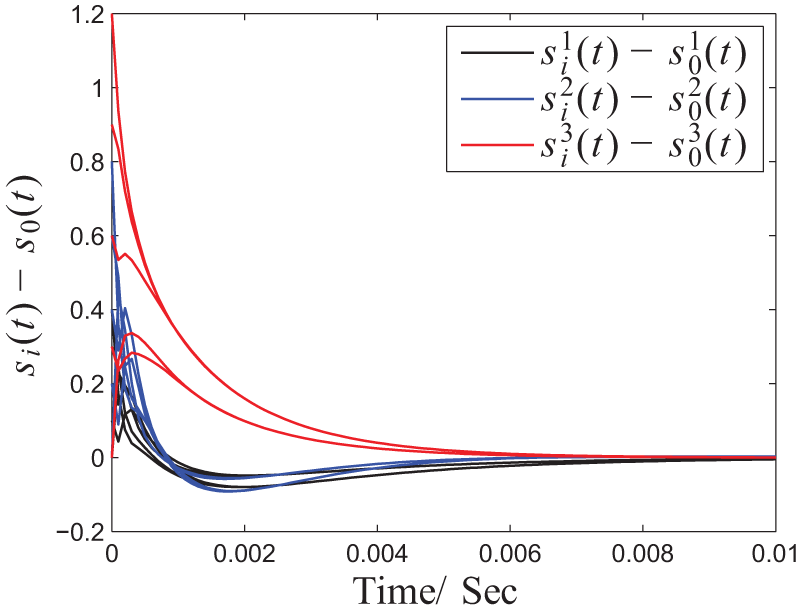
Consensus error between leader and followers with impulsive (Theorem 2).
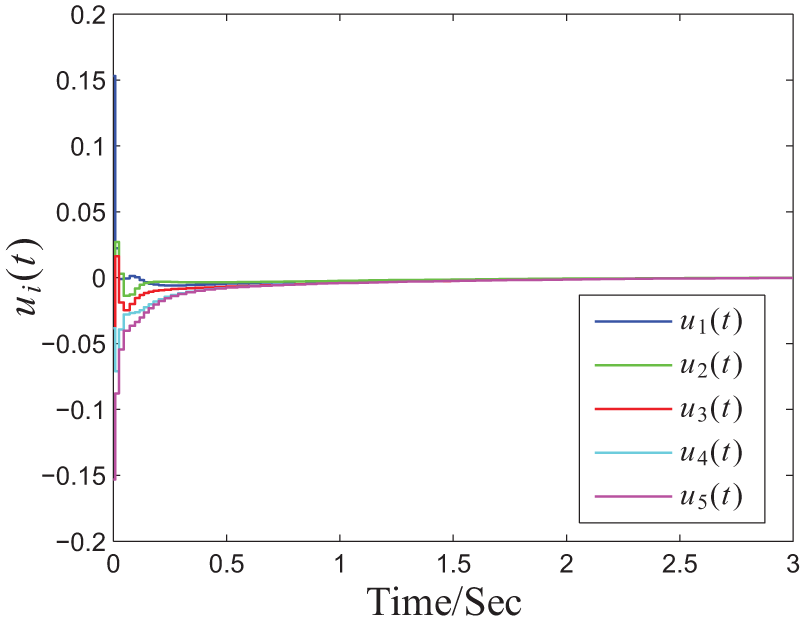
Controller update of followers with impulsive (Theorem 2).
States of agents (leader and followers) with impulsive (Theorem 3).
Consensus error between leader and followers with impulsive (Theorem 3).
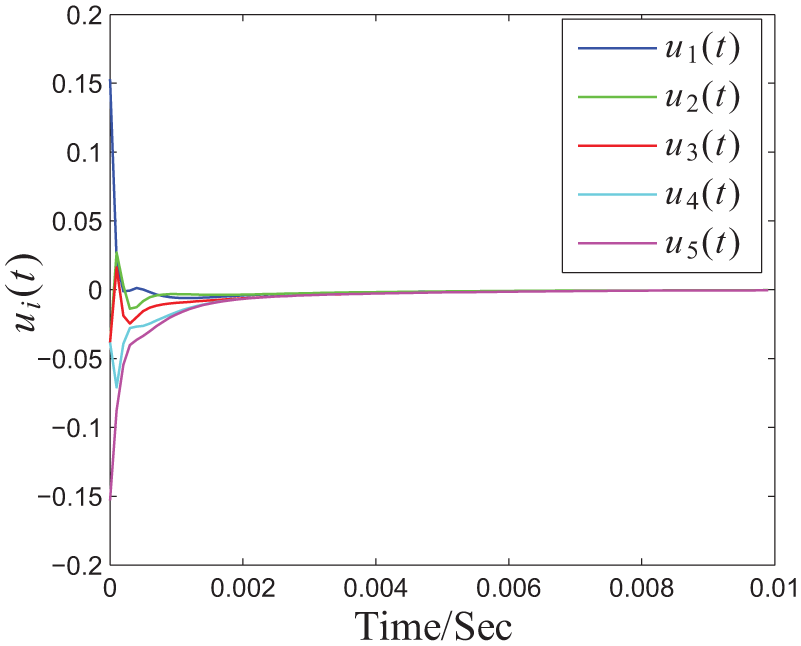
Controller update of followers with impulsive (Theorem 3).
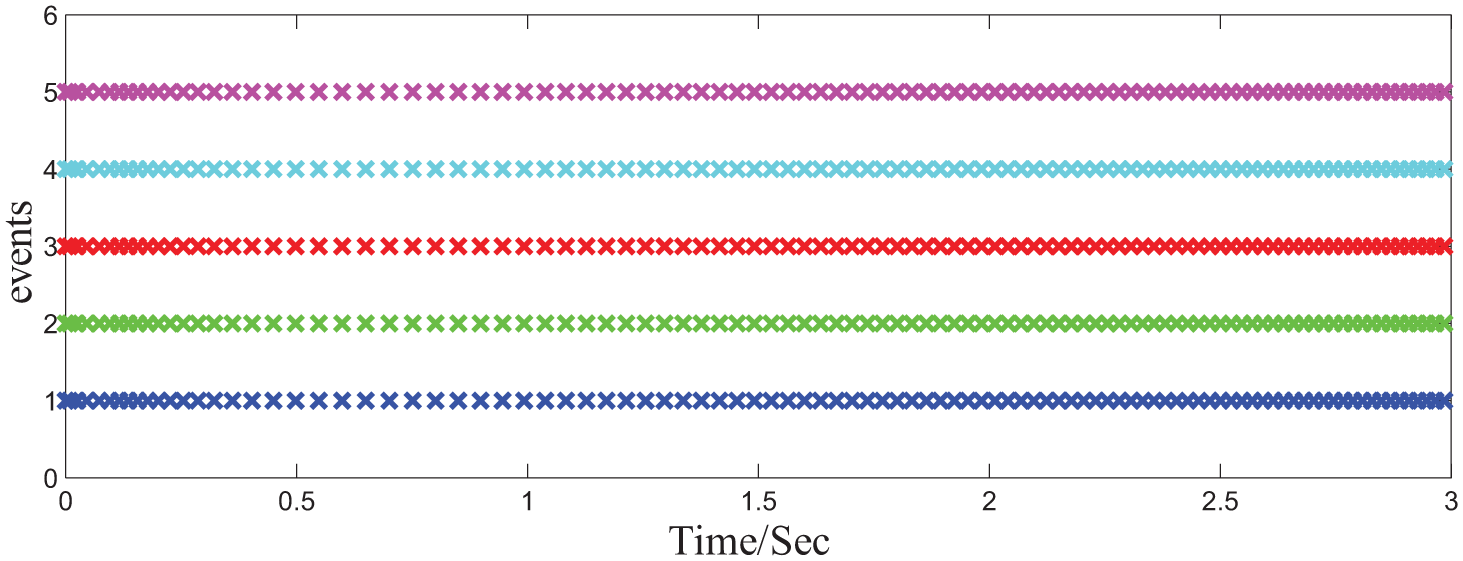
Event instants of followers (Theorem 2).
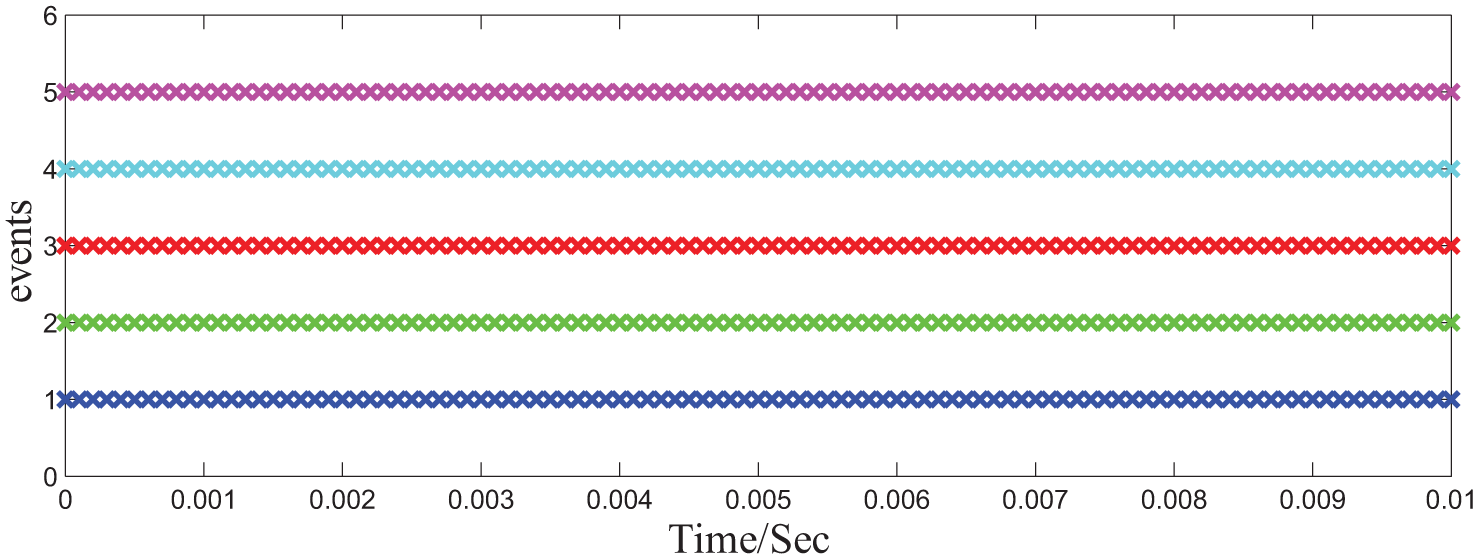
Event instants of followers (Theorem 3).
Remark 4
In simulation results, dotted lines and solid lines represent the states of leader and that of followers, respectively, and different colors represent different components. Figures 1 and 2 are the states of all agents and the consensus error between leader and followers without impulsive, respectively. Figures 3–5 are simulation results with event-triggered impulsive controller (Theorem 2). While Figures 6–8 are simulation results of Theorem 3, in which impulsive instants are determined by equation (19). Besides, Figures 9 and 10 show that there is no Zeno-behavior in the closed-loop system whether impulsive instants are determined by equation (3) or by equation (19).
Remark 5
Figures 1 and 2 show that the leader-following consensus cannot be achieved without impulsive, while Figures 3–5 (Figures 6–8) show that impulsive effect can make leader-following consensus achieved. So, the impulsive control plays an important role for the consensus of system, where
Conclusion
In this paper, leader-following consensus of multi-agent systems is studied via event-based impulsive control. Impulsive instants are determined by certain state-dependent triggering condition, so as the controller update instants. The design proposed in this paper is simpler and can reduce communication among agents and frequency of controller update. In order to avoid continuous communication among agents in systems, a novel manner, in which the state information of agents only at event instants is used, is proposed to determine the even instants. The leader-following consensus can be achieved under designed event-based impulsive controller. Moreover, the Zeno-behavior can also be excluded. In fact, impulsive instants for each agent in this paper are synchronous. How to deal the case that the consensus can be achieved in asynchronous impulsive instants without using global information, for example,
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work is supported partly by National Natural Science Foundation of China under Grant 61673080, 61403314, partly by Training program Foundation for the Talents of Higher Education by Chongqing Education Commission, partly by Innovation Team Project of Chongqing Education Committee under Grant CXTDX201601019, and partly by Chongqing Research and Innovation Project of Graduate Students under Grant CYS17229.