
Abstract
This paper presents the application results of a fuzzy proportional–integral–derivative controller of temperature in an industrial resistance furnace. The challenges arise from the features of resistance furnaces such as non-linearity, strong inertia, large lag, and time-varying parameters. A fuzzy proportional–integral–derivative controller is adopted here to overcome these challenges. The hardware part of the control system is an ECS-700 distributed control system and an industrial PC, and the software part is built on Object Linking and Embedding for process control technology and MATLAB. The experimental results on an industrial furnace system show that the proposed fuzzy proportional–integral–derivative controller achieves better control performance with shorter setting time and smaller overshoot.
I. Introduction
Resistance heat treatment furnace is widely used in many industrial areas. It translates electric energy by means of well-known laws of convection and eradiation heat transfer into the thermal energy through electric heating elements that are emplaced in the furnace. 1 From the point of view of real-time control, it is a non-linear, large inertia, and large delay process. 2 Due to the advances of simple structure, easy of use, good robustness, high reliability, stabilization, and zero-steady-state error, most of the existed furnace temperature control strategies are proportional–integral–derivative (PID). 3 However, the application results also show that the conventional PID control is difficult to achieve desired control performances because of the non-linearity, time delay, and time-varying parameters.
As one of the intelligent control methods, fuzzy control system has been used in many industrial areas with strong reasoning ability from expert knowledge. 4 By integrating the simplicity of PID and strong reasoning ability of fuzzy system, adaptive fuzzy PID controllers have been investigated for the industrial resistance furnaces with various implementations.1,4 However, little of the reported works are based on industrial applications. This work presents the implementation of fuzzy PID controller based on a commercial OPC toolkit and the MATLAB fuzzy toolbox. The PID parameters are self-tuned by fuzzy rules and transmitted to the PID controller implemented based on the ECS-700 distributed control system (DCS). The data communication between the DCS system and MATLAB is realized by Object Linking and Embedding (OLE) for Process Control (OPC) technology.
The rest of the paper is organized as follows. First, the architecture of the adaptive fuzzy PID control system is presented in Section II. Section III introduces the OPC-based real-time communication. In Section IV, the proposed adaptive fuzzy PID control method is described. The initial parameter setting and experimental results are given in Section V. Concluding remarks are given in Section VI.
II. Architecture of Adaptive Control System
The structure of resistance furnace temperature control system is shown in Figure 1 .
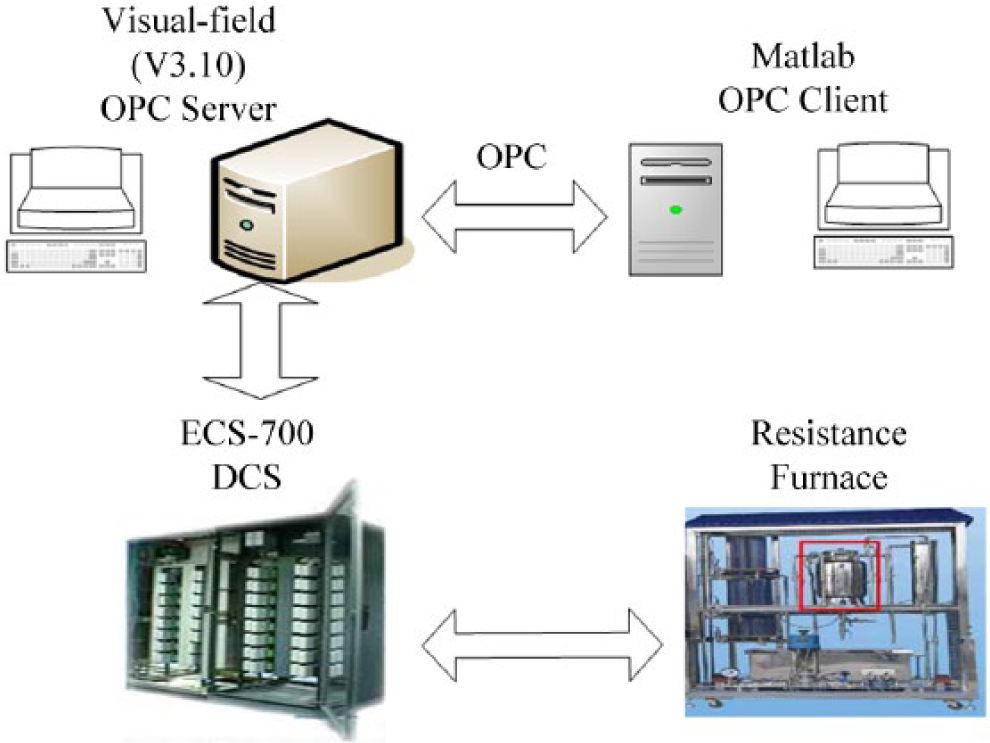
Architecture of resistance furnace temperature control system
The hardware part of this system mainly includes an industrial PC, the ECS-700 DCS, and the resistance furnace. The software part of the system includes configuration program and the OPC client toolkit in DCS, visual-field (V3.10) OPC server in the industrial PC, and MATLAB software platform with the OPC client toolkit. By designing the configuration programs in the ECS-700 DCS, the collected process data are updated in real-time and presented in the OPC server. The designed adaptive fuzzy PID control programs run in the MATLAB platform and the OPC client transmits the data between the ECS-700 DCS and the industrial PC. After the fuzzy reasoning and calculation by the fuzzy rules, the regulated PID parameters are sent back to the configuration system of the ECS-700 DCS. Then the control signals are converted to the required voltages by the DCS and related circuits. The actuators accept the control signal from the DCS and translate the signals to silicon-controlled rectifier (SCR). With the related control circuits, the control signals tune the heating power to achieve the expected temperature. The real-time temperature control of the resistance furnace is implemented.
III. The OPC-Based Real-Time Communication
The OPC stands for the Object Linking and Embedding for Process Control. It defines a series of industrial standard software interfaces which is used for data exchange among the industrial devices, control systems, and management softwares.
By using the OPC toolkit in MATLAB, the OPC client application program is created to realize the communication between MATLAB and the OPC server. Therefore, the designed adaptive control system communicates with the industrial furnace system based on the standard OPC. 5 The OPC server is composed of three levels of objects, including the server object, the group objects, and the data items. The data items are the least unit for reading and writing data. The data items provide a connection between the OPC server and the process data source. The hierarchy of the structure is shown in Figure 2 .
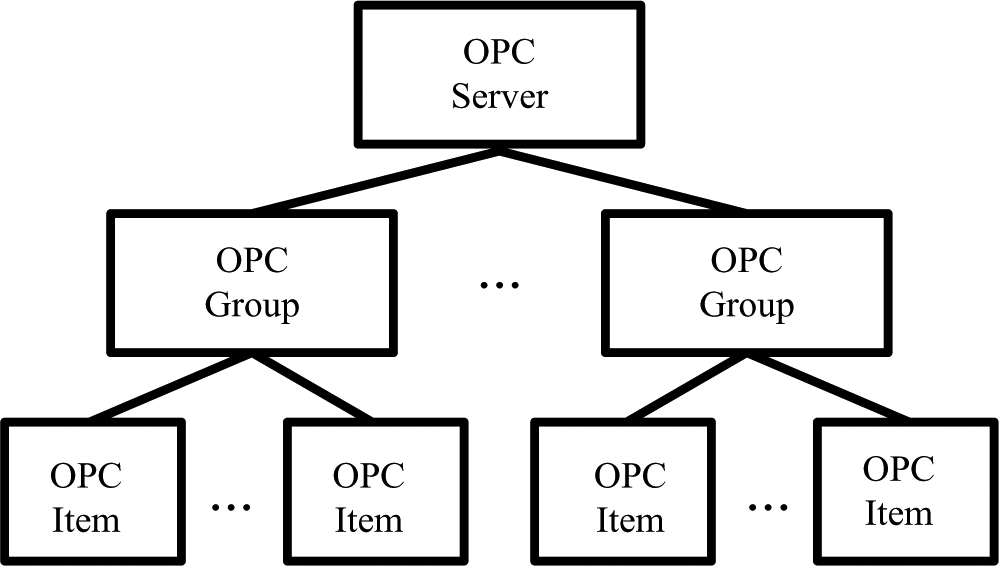
Hierarchy of three levels of objects in the OPC server
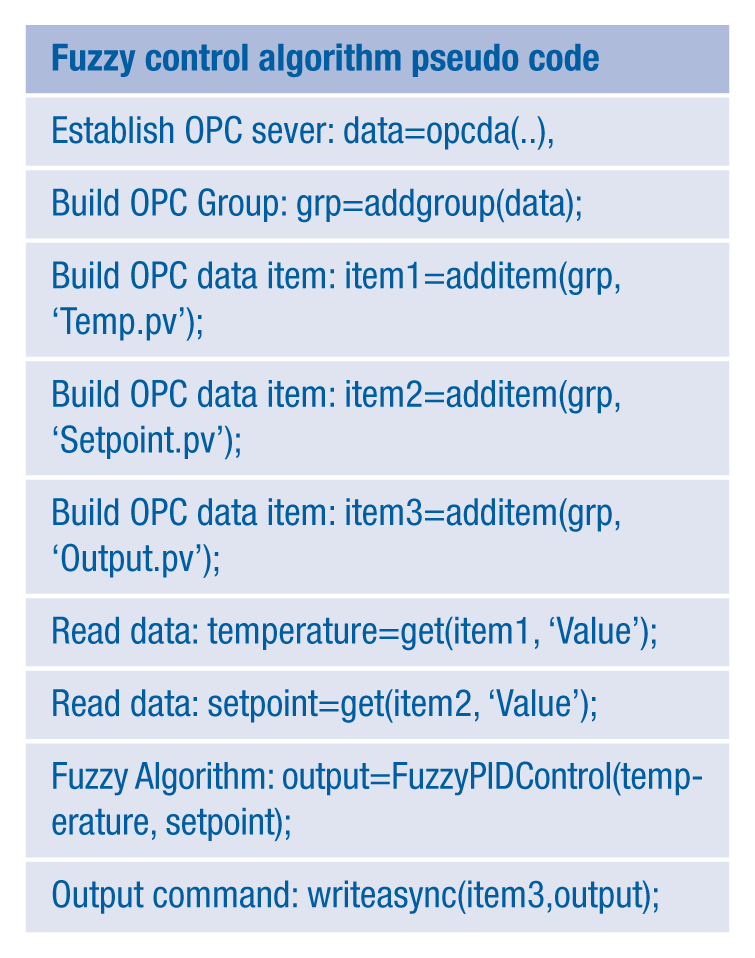
There are three modes to access the data items of OPC server: asynchronous, synchronous, and callback. The asynchronous transmission mode is used here. For realizing the communication between the ECS-700 DCS and the program of MATLAB, three variables (Temp.pv, Setpoint.pv, and Output.pv) are defined in the ECS-700 DCS real-time database. Temp.pv is for the acquisition of furnace temperature. Setpoint.pv is for the temperature set-point. Output.pv is for the output value of the designed adaptive fuzzy PID control algorithm.
Then the main communication process between the ECS-700 DCS and MATLAB is shown as Figure 3 . The algorithm follows the following pseudo code:
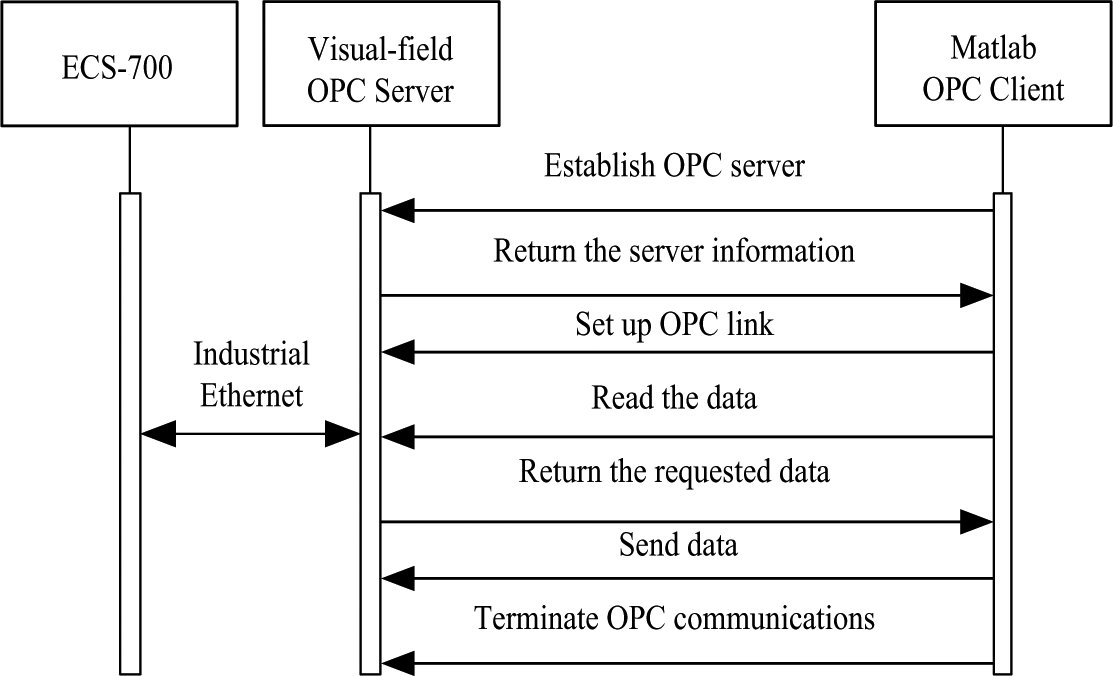
The OPC communication process
IV. Adaptive Fuzzy PID Controller
The designed adaptive fuzzy PID controller is shown in Figure 4 as a two-input and three-output structure. The input variables are temperature error e and the rate of temperature change de/dt or denoted as ec. The three output variables are the increments of PID parameters ∆Kp, ∆Ki, ∆Kd. The fuzzy PID tuning section comprises the fuzzifier, the rule base, the fuzzy inference, and the defuzzifier blocks. The fuzzifier translates the temperature error and the rate of temperature change into the fuzzy variables. The defuzzifier acts in an opposite way, that is, translates the three fuzzy output variables into precise variables. The fuzzy sets of the input variables and the output variables are {NB, NM, NS, ZO, PS, PM, PB}. The triangular-type membership functions are presented in Figure 5 with a description of the notation for the fuzzy sets in the caption.
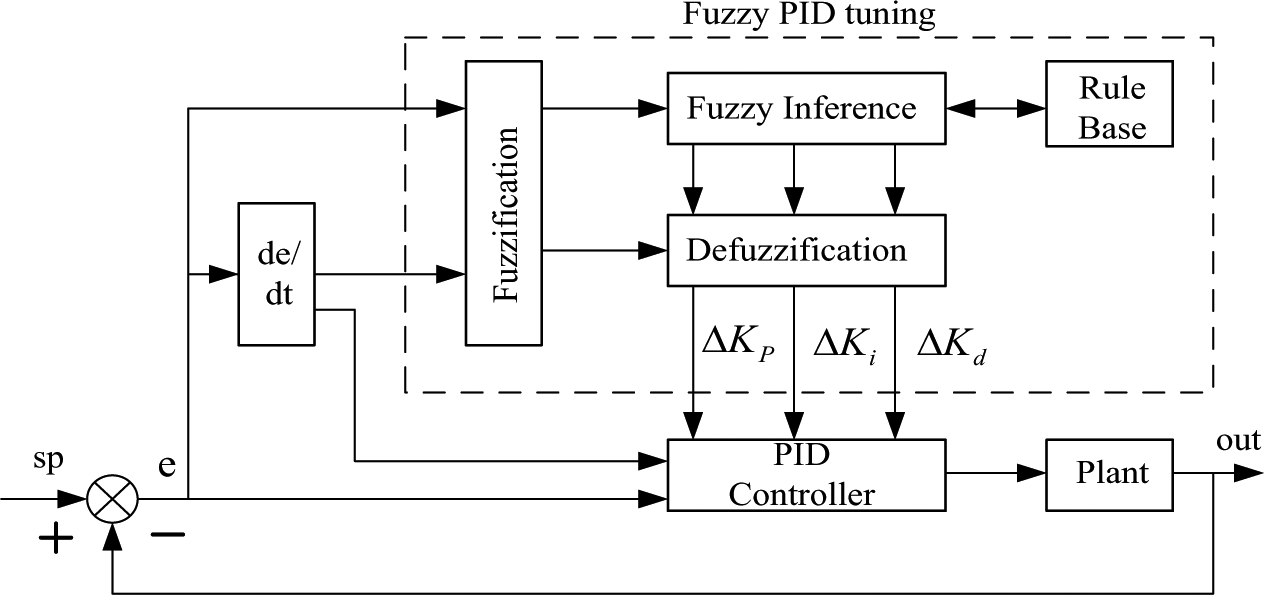
Structure of the adaptive fuzzy PID controller
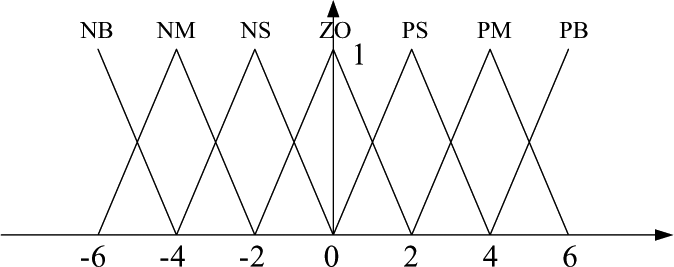
Fuzzy membership functions (NB/NM/NS-negative big/negative medium/negative small, ZO-zero, PS/PM/PB-positive small/positive medium/positive big)
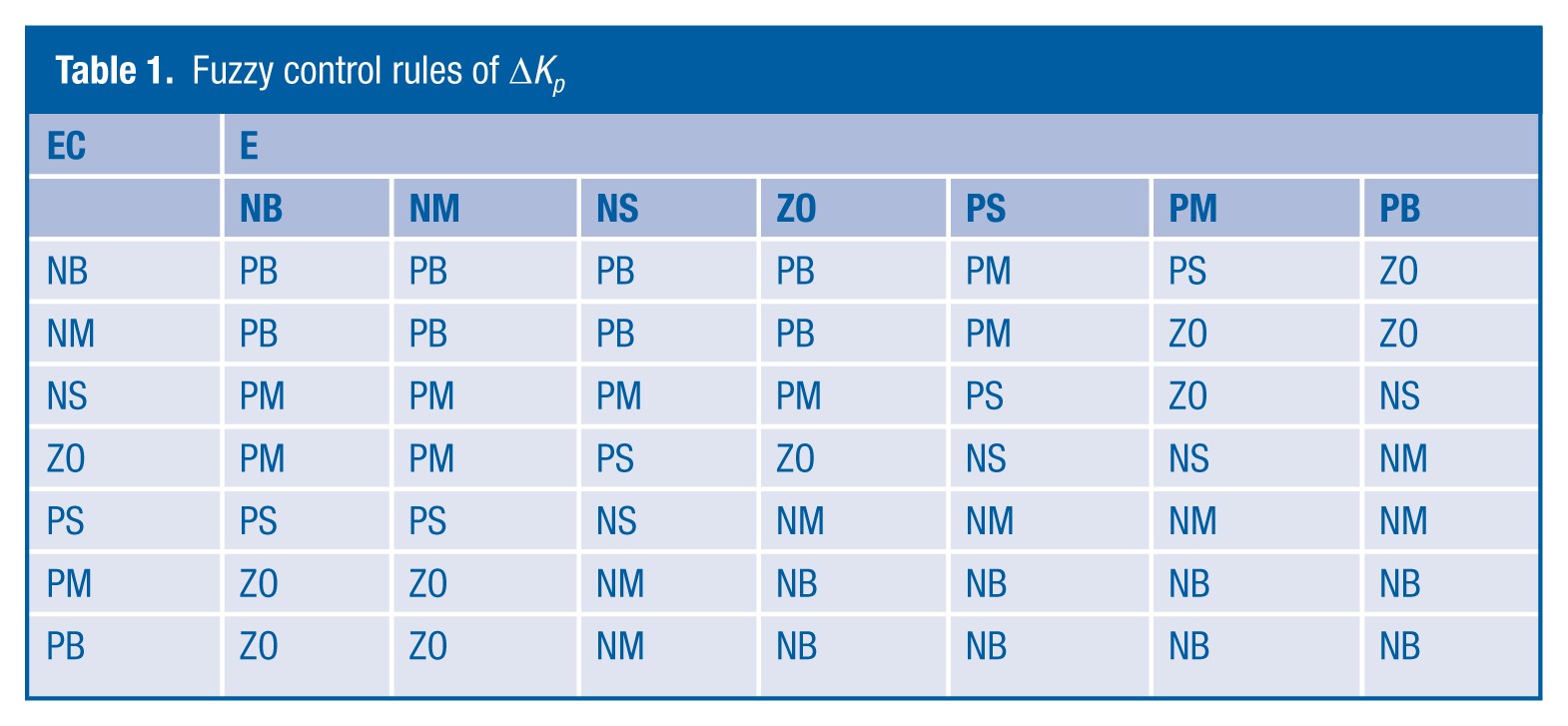
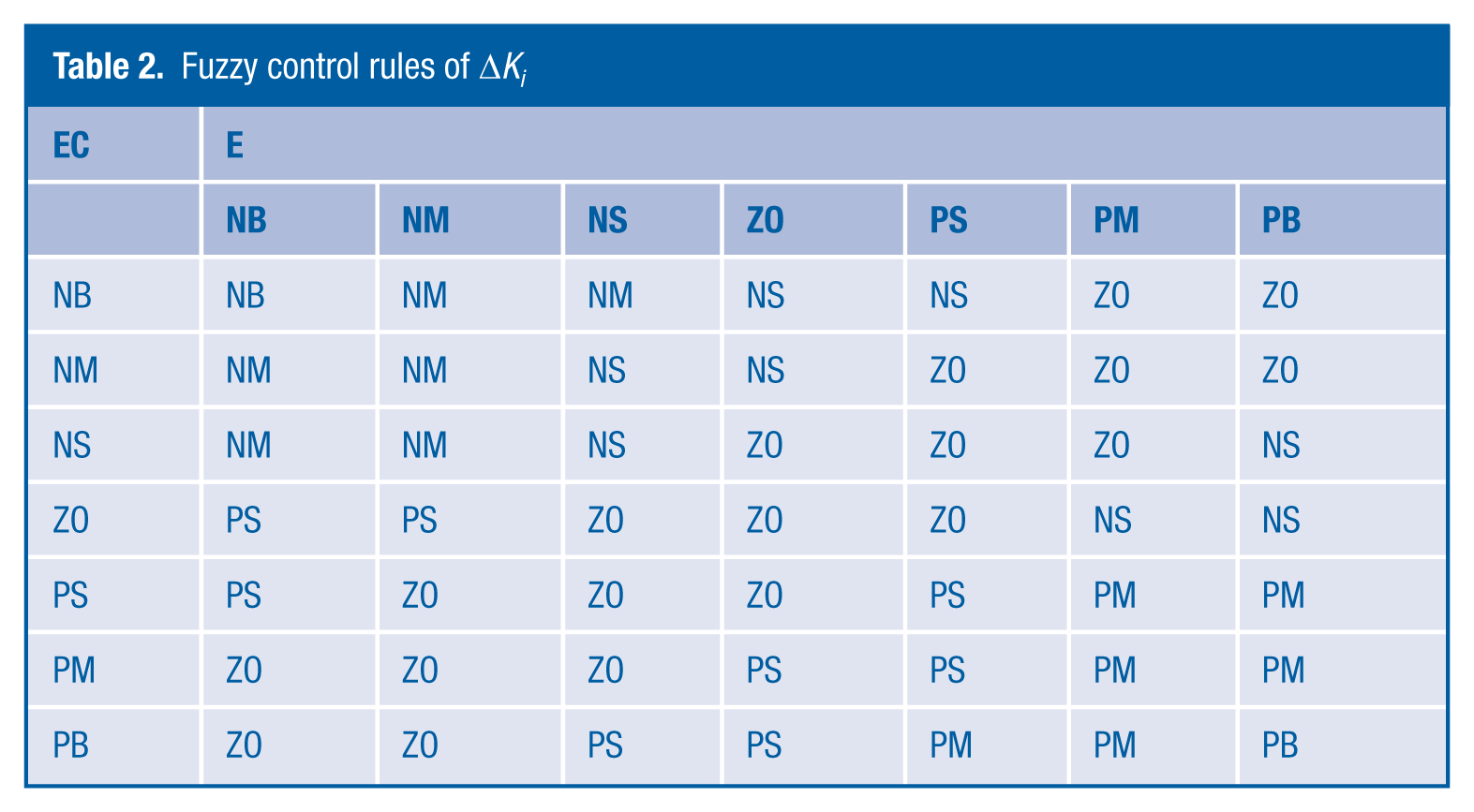
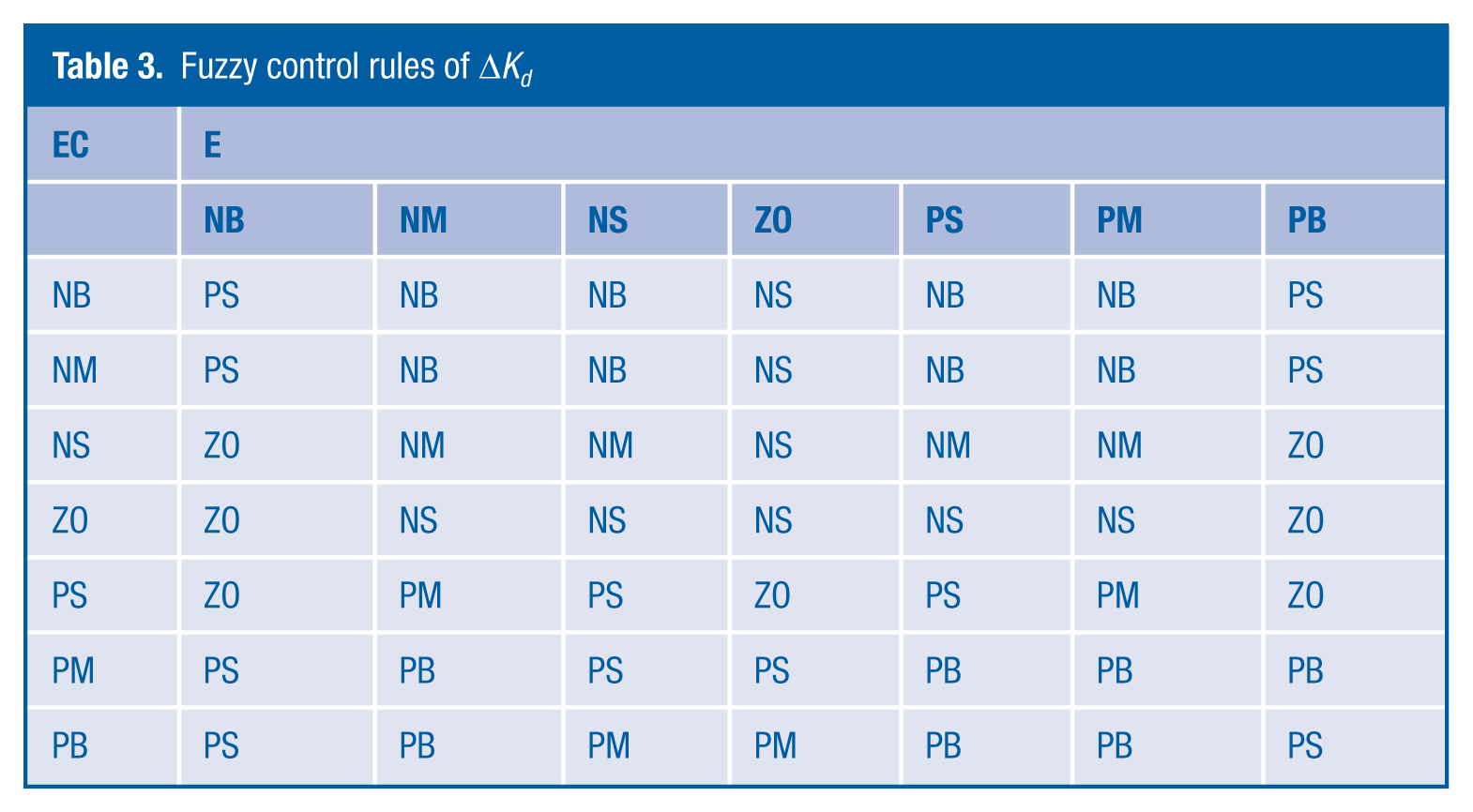
The core part in the design of fuzzy systems is to build the appropriate fuzzy rules. The fuzzy rules can be built based on the characteristic of the plant to be controlled and the type of the controller and practical operating experience. The proposed fuzzy system also considers the existing fuzzy rules for a similar plant provided by Wen and Liu 1 and Huang et al. 4 The fuzzy rules particularly for the resistance furnace are shown in Tables 1 – 3 .
Fuzzy control rules of ∆Kp
Fuzzy control rules of ∆Ki
Fuzzy control rules of ∆Kd
As shown in Figure 4 , the fuzzy values of the outputs (∆Kp, ∆Ki, ∆Kd) are produced in the fuzzy inference block. These fuzzy parameters are then defuzzified to precise values. Then the PID gains are obtained as equation (1)
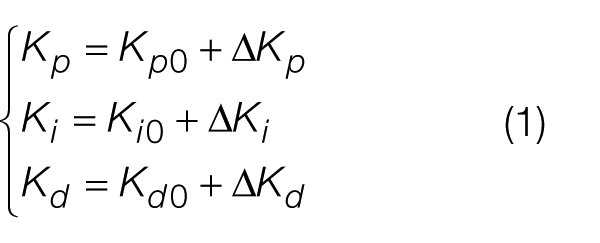
where Kp0, Ki0, Kd0 are the initial values.
V. Initial PID Parameter Setting and Experimental Results
The resistance furnace is an object with heat capacity lags. Based on the testing data of the resistance furnace, a simplified system mathematical model is built as a first-order process with time delay which is described in equation (2)
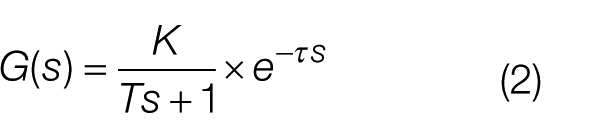
where K = 2.68 is the amplificatory coefficient, T = 2480 is the inertia time constant, τ = 260 is the time delay, and s is the Laplace notation.
By using the Ziegler–Nichols method, the original PID parameters are chosen as equation (3)
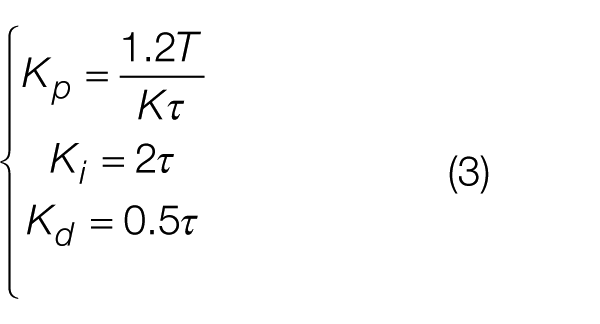
Therefore, the initial PID parameters are chosen as
The controlled resistance furnace is an electric three-phase resistance 4.5 kW furnace at atmospheric pressure, including the liner and jacket. The interior is equipped with electric heating devices and one water circulation way provided by the water supply system. The jacket is equipped the other cooling water way provided by the water supply system. The architecture of resistance furnace temperature control system is shown in Figure 1 . With the professional configuration software SUPCON, the designed configuration operation interface of control system is shown in Figure 6 .
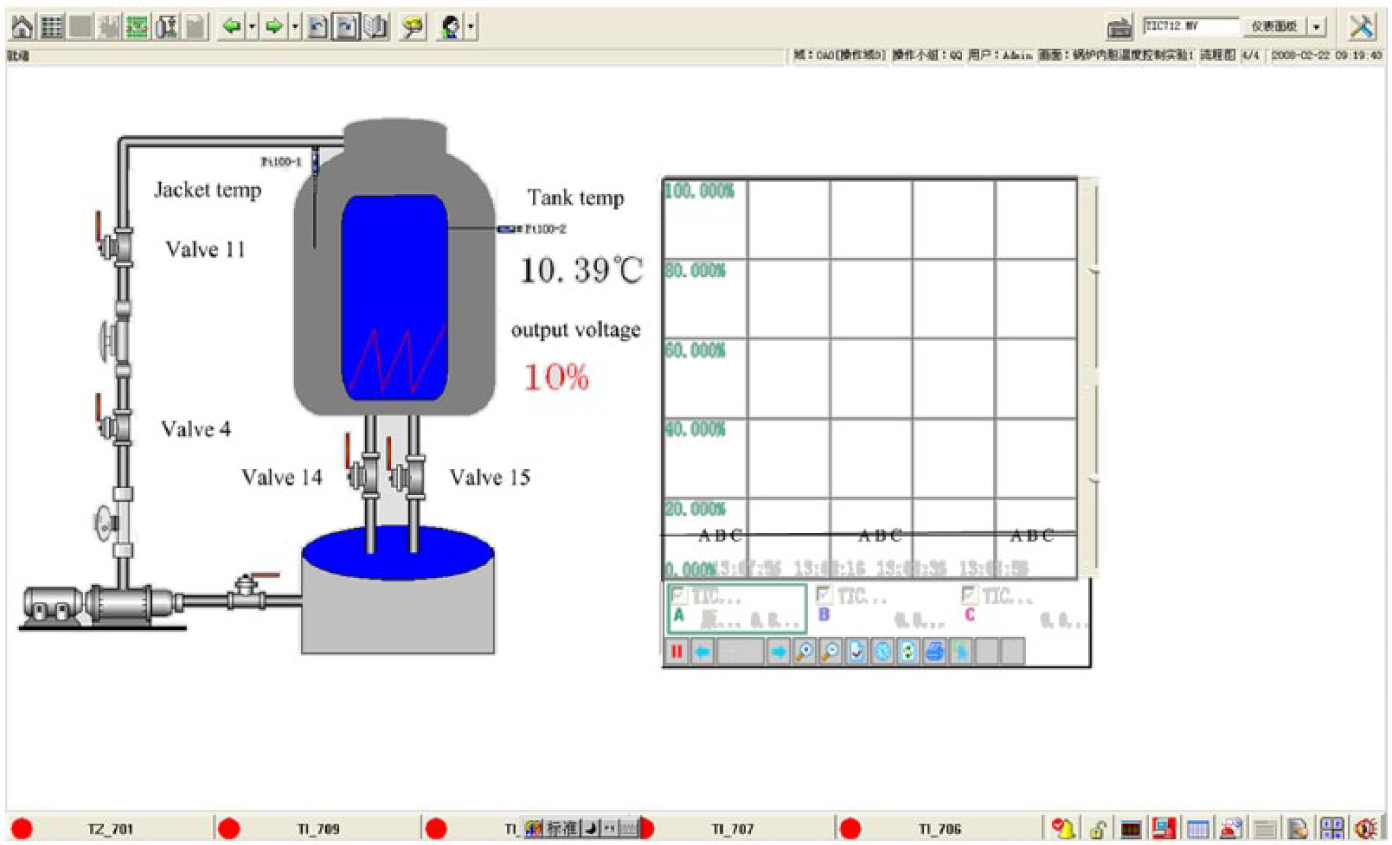
Resistance furnace temperature control interface by SUPCON software
For evaluating the performance of the fuzzy PID control, a step change of the set-point value has been introduced into the resistance furnace under the conventional PID control and the adaptive fuzzy PID control, respectively. The results of applying the designed controller and PID controller on the real furnace are presented in Figure 7 . The overshoot value of designed method is decreased to 10% of PID control method. The settling time of designed method is reduced to 40% of PID control method. From the comparison between curve B and curve C, it is obvious that the adaptive fuzzy PID control method achieves better dynamic performance, such as a shorter settling time with smaller overshoot value. For these two control methods, the steady-state errors approach 0.
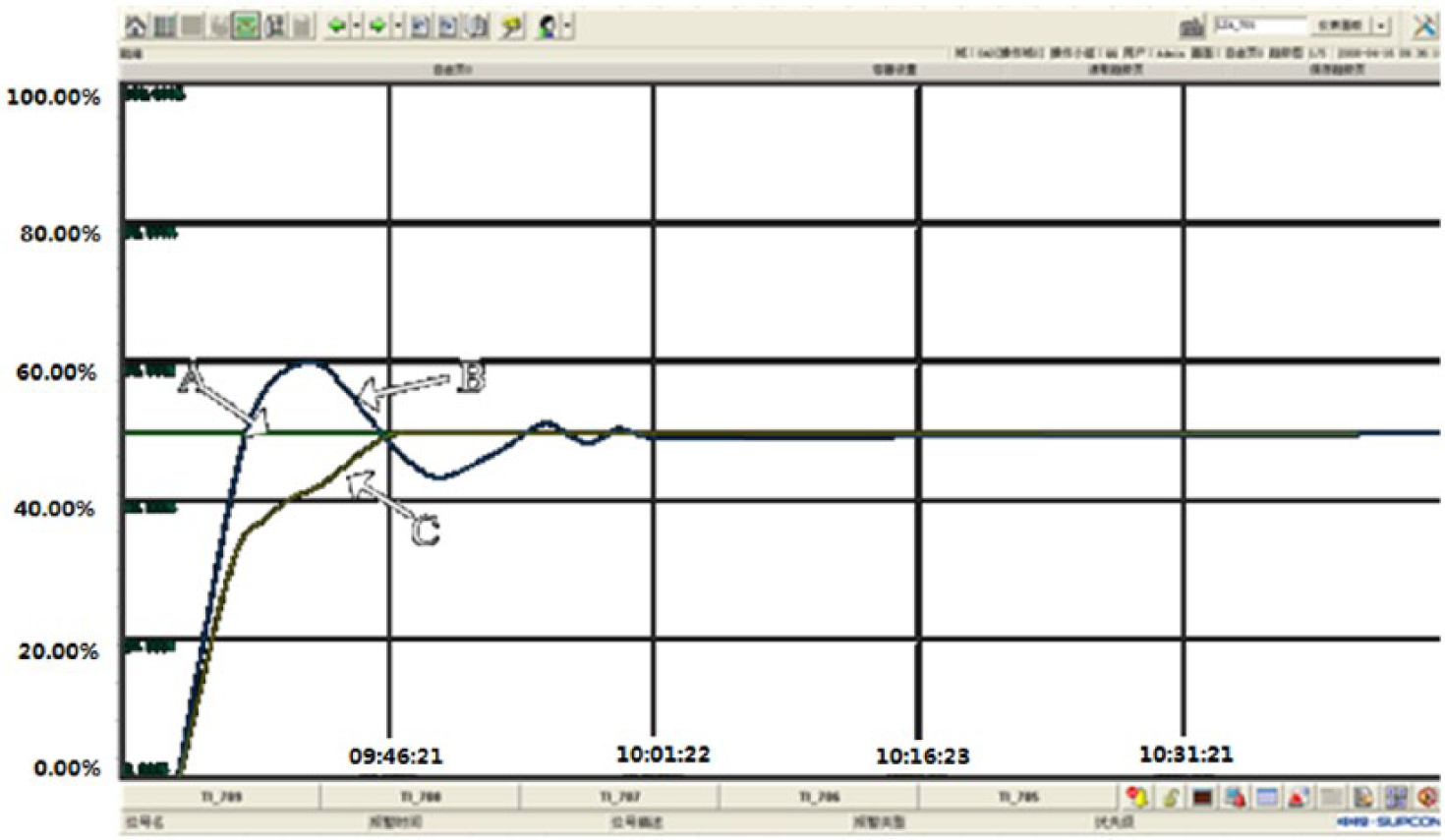
Real-time furnace temperature response
In this application, the fuzzy rules have been tuned to speed the controller up and make a smoother approach in the vicinity of the set-point value. The final fuzzy rules are shown in Tables 1 – 3 . The designed adaptive fuzzy PID control system has been run for over a year and the better control performance of the resistance furnace temperature has been achieved. There is no extra tuning work assigned to the operators.
VI. Conclusion
By combining the simple structure of PID control with strong reasoning ability of fuzzy rules, an adaptive fuzzy PID controller is designed for resistance furnace system. With the OPC technology, the advanced control algorithm is built on the MATLAB platform. The real-time control system is implemented through the OPC-based communication. The experimental results clearly show that the designed adaptive fuzzy PID controller achieves better control performance than conventional PID controller.
Footnotes
Funding
This research was partly supported by the project of National Natural Science Foundation of China (61203021), the Natural Science Foundation of Liaoning Province (2013020024), and the National Science and Technology Support Program (2012BA-F05B00).