
Abstract
This paper provides a premise and the motivation for making a case for lightweight vehicle body structures, with embedded functionality, using actively controlled materials. Such active materials have the ability to change the structural properties in the event of varying conditions, including dynamic loading and vibrations, with the extreme scenario being that of a collision. Prompted by ever stringent legislation concerning crashworthiness and CO2 emissions, coupled with the fact that all new vehicles in the future will be fully equipped with advanced driver-assisted systems, including on-board active safety systems, the paper proposes a strategy for actively controlling the energy absorption of the vehicle body structure. The concept of an active buckling control approach, while still in its early development stage, is described. Encouraging results have been obtained via simulation, and the potential control approach for specifying a buckling load, related to the smallest positive buckling eigenvalue, hence onset of energy absorption, is discussed. It is conjectured that an active buckling control approach may become part of future legislation for testing vehicle body structures, where the issues of compatibility and reduced aggressivity are deemed to become compulsory.
I. Introduction
Stringent vehicle safety testing has evolved from the inception of the European New Car Assessment Programme (NCAP) in 1994. The realisation of the concept has steadily become proactive, with the first result being released in 1997. 1 At this time, the tests involved only adult occupant protection, with the test being so severe that it was anticipated no car would ever be able to achieve a four-star rating. However, in the same year, Volvo achieved a four-star award for adult occupant protection with the Volvo S40. Four years later, in 2001, the Renault Laguna became the first ever five-star-rated car. This clearly illustrates how the automotive industry can and will evolve if motivated by the new legislation. As well as automotive manufactures needing to meet the European NCAP standards, they must also meet standards outside of Europe, such as the Insurance Institute for Highway Safety (IIHS). This presents problems to automotive manufactures, as they must engineer a design of the body structure to meet worldwide regulations. Rapid changes would require changes to the vehicle body structural load paths and perhaps the tooling, thus with an increased accompanying cost. Hence, the most effective method is to develop vehicle body structures that meet all standards within one structure without any significant changes.
A. The Motivation: Vehicle Safety and Vehicle Mass
The need to improve vehicle safety for occupants has resulted in an overall increase in vehicle mass, as vehicle body structures have become stiffer to resist bending and buckling. This has been achieved essentially by increasing the gauge of the material and adding structural reinforcements. To highlight this, data have been collected which indicates an increase in mass by an average of 8 kg per year from 1980 to 2006. 2 An increase in vehicle mass has been shown to be directly related to CO2 emissions per km driven, 3 with studies showing that a 10% reduction in vehicle mass can result in a 6%–8% improvement in fuel efficiency. 4 The 2008 Climate Change Act has brought about an aim to reduce the UK greenhouse gas emissions by at least 80% (from the 1990 baseline) by 2050. Currently, this target looks very unlikely to be achieved unless new innovative steps are taken.
It has been demonstrated by many vehicle mass reduction programmes worldwide that reducing the mass of vehicle body structures is the most effective method to improve fuel economy and reduce CO2 emissions. Moreover, vehicle body lightweighting results in less power being required for acceleration and braking, which has a further knock-on effect for downsizing other components, such as the engine, transmission and braking system. Due to larger amounts of material required to achieve the desired crashworthiness ratings, it is recognised that current vehicle body structures are vastly over-engineered for day-to-day driving conditions, with the over-engineered structure only being called upon in the rare event of a vehicle entering a collision. With the demand for the United Kingdom to reduce CO2 emissions as outlined above, an argument is therefore put forward for the need for lightweight body structures.
This paper represents an investigation into lightweight, adaptive structures using actively controlled materials (ACM) that are capable of compensating for a wide range of different loads, such as the forces generated from cornering, accelerating, decelerating and from the road conditions (bumps) that are causes of everyday loads experienced by vehicle body structures. In contrast, extreme events such as a collision with an obstacle or another vehicle occur rarely, yet vehicle structures must be designed to deal with such events. Currently, this means using large amounts of material to ensure the vehicle meets safety criteria that are rarely needed. ACM can be used to alter the mechanical properties of a structure and to predetermine the force level at which a structure begins to buckle. This paper will focus on changing the structural properties of the vehicles’ longitudinal members to prevent intrusion into the passenger cell and to absorb energy in a more effective manner, by the use of ACM. This is potentially useful in the design of a vehicle’s front (and rear) longitudinal members, which are currently required to buckle passively in the event of a collision with another vehicle. The future use of ACM means that a controlled vehicle body structure can manage extreme events more effectively and use less material.
The paper is organised as follows: Section II describes the vehicle body structure legislation issues. Section III provides a case for future automotive body structures and safety testing. Under section III, subsection A describes the modelling of mechanical structures, linking to the eigenvalue problem and a finite element analysis (FEA)-based simulation. Section IV details the concept of actively controlled structures. Finally, section V provides conclusion.
II. Vehicle Body Structure Legislation Issues
As discussed in section I, current vehicles must comply with the safety legislation, known as crashworthiness. In the event of a collision, the vehicle body structure must be capable of satisfying the following criteria: resisting intrusion into the passenger compartment and not allowing excessive decelerations/accelerations to be experienced by the occupants. The front and rear crumple zones are required to absorb energy and the passenger cell is designed to prevent intrusion.
With the aim of conforming to crashworthiness legislation, to achieve the above criteria, specific tests have been designed by the European NCAP, whereby the vehicle body structures are required to undergo: frontal impact, car-to-car side impact and pole side impact. The case considered here is the frontal impact test, which is designed to evaluate the energy-absorbing capabilities of the front-end structure and protection given to the occupants in the passenger cell, when being driven at 17.88 m/s (40 mph) into an immovable block fitted with a deformable aluminium honeycomb face. 1
Consider Newton’s third law, which states that all forces exist in equal and opposite pairs, where the vehicle applies a force, denoted Fa onto the immovable block, which exerts a force, denoted Fb on the vehicle. Hence, there is an action force created by the vehicle striking the block and a reaction force back to the car from the block, such that
Theoretically, the European NCAP frontal impact structural test is only applicable to vehicles of the same mass, noting that larger vehicles are more aggressive towards smaller vehicles in the event of a collision.
The above observation can be further illustrated by an example of two vehicles, denoted Vehicle A and Vehicle B, of dissimilar mass, where the conservation of momentum and energy are considered. For this example, vehicles of mass ma and mb are given by 1000 and 500 kg, respectively, with the final velocity of the combined masses being denoted as Vf. Prior to the collision, the individual vehicle velocities are given by Va and Vb. It is well known that the conservation of momentum can be expressed as
where
is the combined mass.
Consider Vehicle A travelling at 17.88 m/s (40 mph) and Vehicle B being stationary. It can be deduced from Equation (2) that the final velocity of the combined mass of the two vehicles is 11.92 m/s (26.7 mph). Furthermore, the principle of conservation of energy states that the kinetic energy before and after the collision must be equal, given by

where ΔE is the collision energy dissipated within the vehicle body structures; in this case, it amounts to 53.3 kJ. It is known that the ratio of absorption of energy from a collision is proportional to the change in the vehicle velocities, 5 denoted ΔVa and ΔVb, where

It can be deduced that the ratio of ΔVa : ΔVbis the same as mb : ma, so that in the event of a collision, the smaller vehicle becomes the more vulnerable of the two and will absorb the larger proportion of the collision energy.
Figure 1
illustrates a surface which represents typical collision events of two arbitrary vehicles, Vehicle A and Vehicle B, with mb in the range of 1000–2000 kg and mb in the range of 500–1500 kg, corresponding to Vehicle
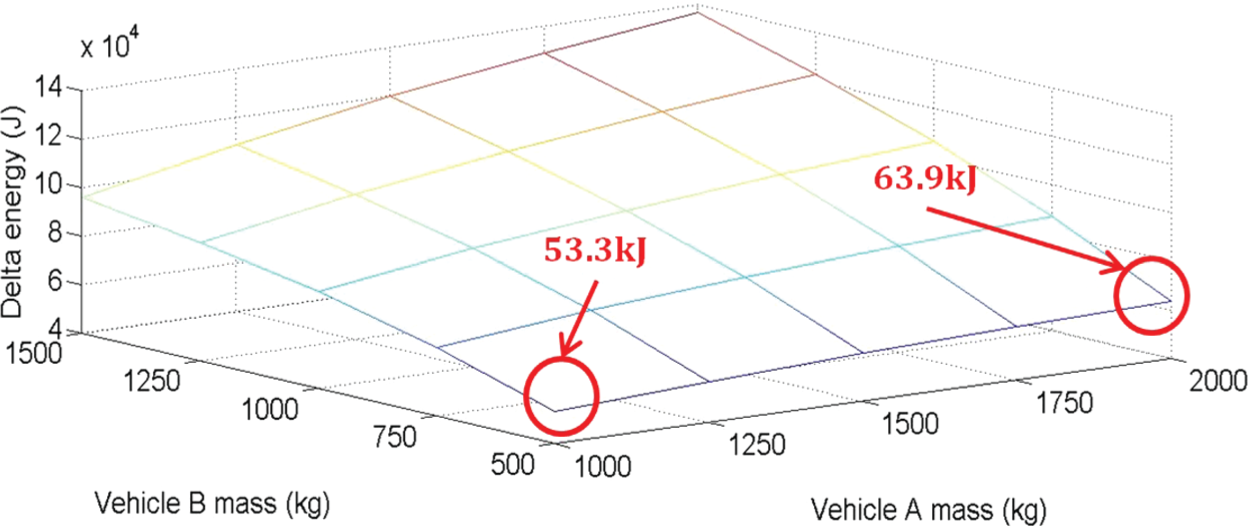
Vehicle collision energy surface at a collision velocity of 17.88 m/s
A further example is given, where the mass of Vehicle A is doubled, that is, 2000 kg and strikes the stationary Vehicle
The above examples highlight the compatibility problem and reinforce the shortfalls of the current crashworthiness tests. Moreover, these examples prompt the need for active buckling control (ABC) of automotive structures in order to share the energy absorption, so that the larger vehicle cushions to absorb more energy and the smaller vehicle stiffens, hence effectively reversing the undesirable situation, thereby reducing the aggressivity of the larger vehicle to the smaller.
III. Future Automotive Body Structures and Safety Testing
Due to the nature of the European NCAP structural test, in the future, it is anticipated that the host vehicles will need to be designed to take into account the partner vehicles in the event of a collision and not just themselves, as is currently the case. This means that vehicles of larger mass will have to give up some of their protection to be less aggressive when they encounter collisions with smaller vehicles in the fleet. The concept of considering the partner vehicle is known as reduced aggressivity, with its origins dating back to 1974. 6 To this day, there is not a unique unit nor definition to describe aggressivity. However, it is measured in terms of the number of casualties inflicted to the occupants of the partner vehicle in a collision. 6
The approach described in this paper is achieved by a combination of the traditional mechanical engineering design together with control engineering to develop structures with embedded functionality, that is, structures that perform more than one task. This is being made possible by the introduction of ACM that possess functions such as sensing, actuating and controlling. ACM such as piezoelectric polymers and shape-memory alloys have the ability to bring about desirable changes to the mechanical properties of a structure. Essentially, by exploiting the ACM approach, an active lightweight vehicle body structure employing ABC can dampen vibrations and noise, and more particularly, depending on host and partner vehicles’ kinetic energy, can control the buckling loads of the front and rear crash structure longitudinal members immediately prior to a collision. The host and partner vehicle interlocking bodies can be controlled to minimise jerk, as well as controlling the stiffness to prevent intrusion into the passenger compartment. In addition, self-health monitoring of the actual structures themselves is also possible.
The ability to change the mechanical properties of the vehicle body structure allows for varying stiffness of the longitudinal members, hence varying the point of buckling, thus the level of energy absorption. This functionality can be used to effectively control the crash pulse and intrusion of a vehicle collision to minimise injury to the occupants. To fully understand the complex relationships between the biomechanics of collision injuries, the crash pulse and deformation characteristics of the vehicle structure, extensive further work will need to be considered. 7 Consequently, consideration is restricted here to the engineering aspects of controlling the energy absorption only. To realise predictive control, the vehicles must have access to data regarding the crash scenario they are entering. It is anticipated that the next generation of vehicles will be fully equipped with advanced driver-assisted systems (ADAS), including on-board active safety systems (ASS) and vehicle-to-vehicle/infrastructure (V2V/I) communication for improved safety. This provides potential for adaptive online predictive control to refine the structural properties of the vehicles immediately prior to a collision. Since both the host and partner vehicles entering a collision will share common data, such as orientation, location, velocity and mass, a better compromise, in some sense, based on these data can be used, via the embedded functionality of ACM, to more appropriately apportion the collision energy absorption among the two vehicles, via ABC.
A. Modelling of Mechanical Structures
The whole vehicle body structure can be subdivided into substructures comprising members or beams, and considered to be modelled as lumped mass, spring and damper systems. A substructure represented by a two degrees of freedom, mass, spring and damper system, hence two structural modes, is illustrated in Figure 2 , where m1 and m2 denote the two masses, with corresponding displacements q1 and q2, k1, k2 and k3 denote the three spring stiffnesses and d1, d2 and d3 denote the three damping factors.
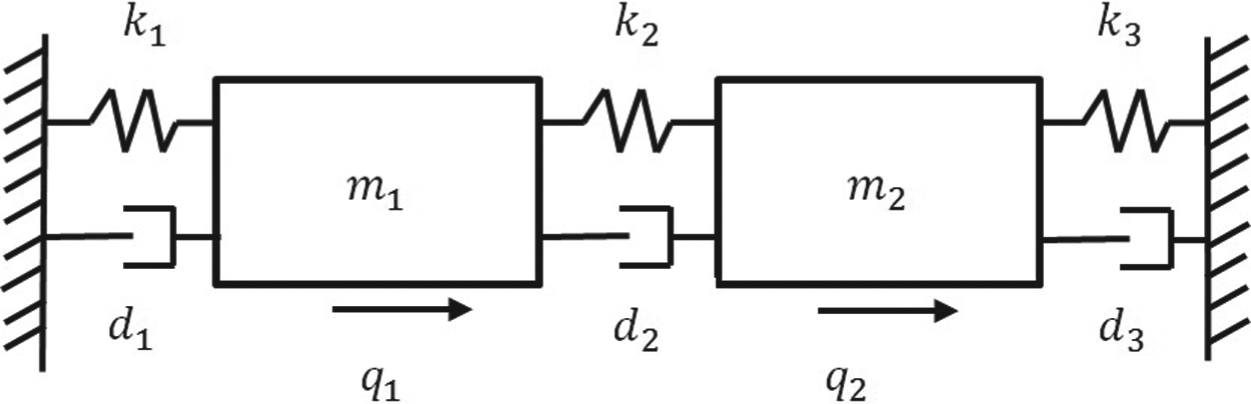
Interconnected two-member system
When modelling mechanical structures, there are basically two conceptual approaches, namely, the nodal and modal approach. 8 The nodal approach considers displacements, velocities and accelerations within specific points (or nodes) of a structure, while the modal approach deals with the spectral properties, that is, the eigenvalues and eigenvectors. Adopting a modal control approach is advantageous as each mode is independent, that is, uncoupled, whereas in the nodal approach, the nodes are coupled. 8
It is assumed that the stiffness and dissipative damping may be actively controlled in the members of the structure. As the level of force required to trigger buckling is to be varied depending on the desired level of energy absorption arising from a collision, the following equation is derived, based on the generalised eigenvalue problem
where (λ, ν) are the eigenvalues and eigenvectors, related to the modes and mode shapes, respectively, and K and Kσ are the stiffness and initial stress matrices of the structures of interest, respectively. A given eigenvalue λ is proportional to the buckling load of a given member, and changing the eigenvalue can be achieved by controlling the stiffness of the material through the use of ACM. At the point where buckling of the structure commences,
To demonstrate the above, a simulation was set up using a non-linear dynamic FEA software package. The result illustrated in Figure 3 corresponds to a typical force versus time curve obtained from the buckling of a frontal longitudinal member of a vehicle. In this case, the peak force before buckling is 221 kN, and this relates to the smallest positive eigenvalue, as outlined above. In effect, the buckling eigenvalue must be greater than some predefined load factor, denoted Cl, that is, λ > Cl. In theory, by specifying the buckling eigenvalue, the load factor Cl is an adjustable quantity being modified by making use of ACM, that is, effectively forcing the vehicle body structure to commence buckling, via ABC, at a desired point so that energy absorption is more appropriately apportioned between the two vehicles.
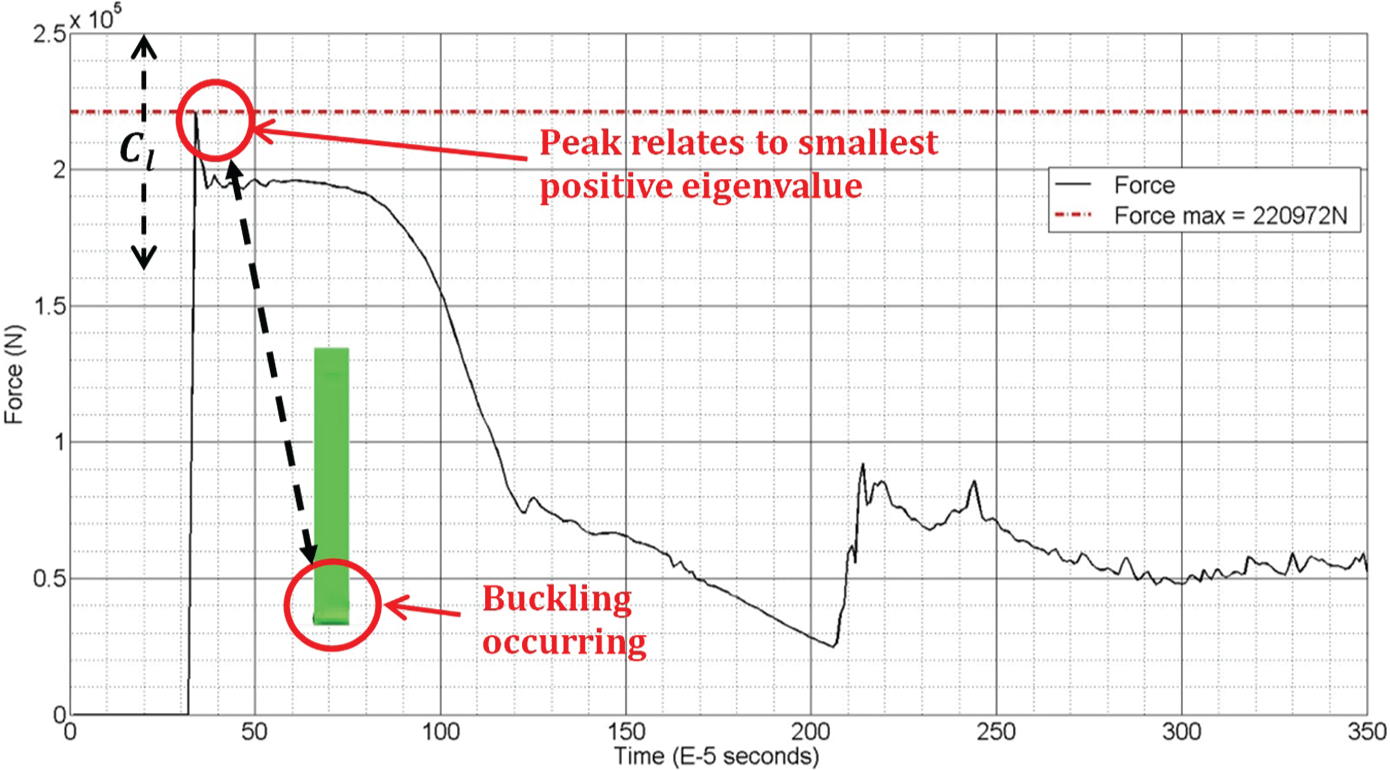
Buckling of a typical vehicle frontal longitudinal member
IV. Concept of Actively Controlled Structures
This section describes the outline of the methodology which forms the basis of the algorithm. It is assumed that the host and partner vehicle are fully equipped with ADAS and V2V, and an estimate of the vehicle mass is continually updated in real time. Consideration is limited in this discussion to the host vehicle only. When the ADAS have exhausted their collision mitigation functionalities and a collision situation is confirmed, ABC is initiated on both vehicles. The flow chart of Figure 4 becomes active once this situation is triggered. The first step is to select the buckling load, corresponding to an initial smallest positive eigenvalue, denoted λi, for the initial crush zone from a pre-calculated multidimensional look-up table. The lightweight structures are pre-stiffened accordingly. In the remaining time up to a short time, denoted Δt, immediately before the collision, changes in the estimated velocities and masses are refined/updated and the desired eigenvalue, denoted λ d , adjusted accordingly. The adaptive update is achieved by making use of a Kalman filter which supplies updated velocity and mass information to the ABC system to determine a refined eigenvalue, corresponding to the buckling load, this becoming the reference input to the block diagram of Figure 5 , with subsequent adjustment to the ACM.
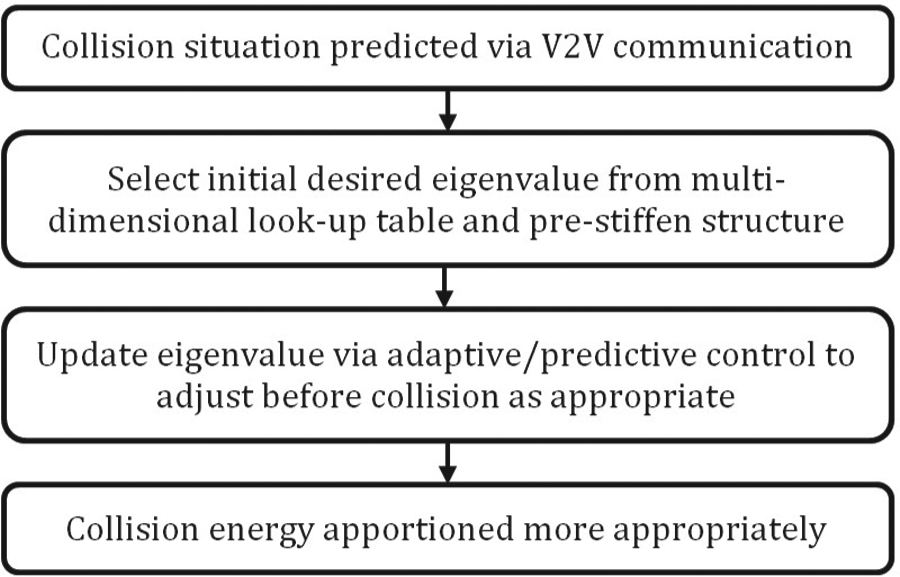
Flow chart illustrating the basic concept
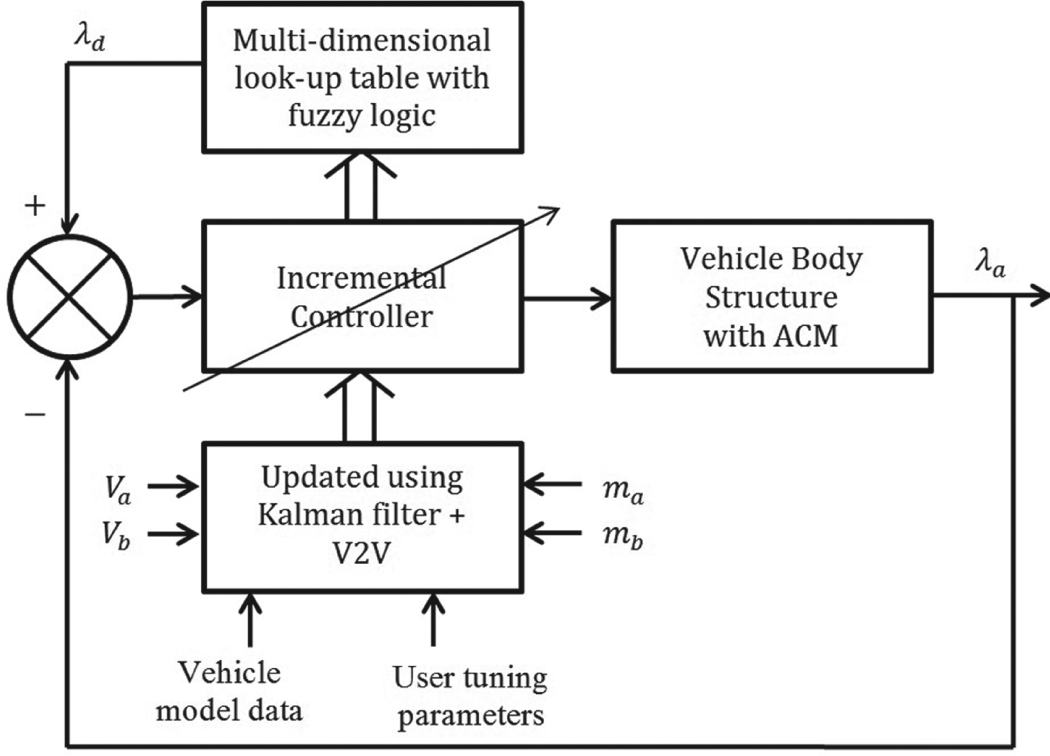
ABC strategy of the vehicle body structure with ACM
A diagrammatic representation of the ABC strategy is presented in Figure 5 . An incremental control system adjusts the control action to the ACM via a feedback mechanism which compares the current actual buckling load eigenvalue, denoted λa, with the most recently updated desired value λd. This update corresponds to the most recently estimated vehicle masses and estimated collision velocity. Thus, during the time period between collision anticipation and just prior to the collision taking place, there is an opportunity to refine the eigenvalues as better estimates of the collision velocity become available. At a point Δt prior to the collision, the buckling eigenvalue is frozen, and the collision energy is shared in such a way as to reduce the aggressivity of the larger vehicle.
V. Conclusion
The paper has outlined the motivation for employing ACM within future lightweight vehicle body structures. The need for lightweight vehicles is driven by the need for reduced CO2 emissions and increased efficiency of the fleet. It is argued that with the widespread uptake of ADAS and on-board active safety, there will be fewer collisions, and that such collisions will be at lower velocities. Consequently, the lightweight structures will be required to be strengthened (stiffened) when such an event occurs.
The premise is based on the fact that when two vehicles of dissimilar mass enter a collision, the smaller of the two always absorbs more energy. By making use of information available concerning the estimated vehicle masses of both the host and partner vehicle as well as their pre-impact velocities, it is possible to change the structural properties of the vehicle crumple zone substructures, so that the energy absorption is more appropriately shared. The smaller vehicle stiffens more than the larger, with the latter cushioning the smaller and absorbing a greater portion of the collision energy.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.