
Abstract
This paper describes the intelligent transportation systems technologies, methods and components and their application to traffic simulation and management. Examples of an agent-based intelligent transportation systems mesoscopic simulator and a cloud-based microscopic simulator are used to illustrate urban traffic management and incident response applications.
I. Introduction
The aim of this paper is to present opportunities and challenges associated with the deployment of intelligent transportation systems (ITS) solutions in urban traffic management. ITS aims to improve traffic flow thereby reducing congestion, air and noise pollution as well as improving safety. ITS rely on the use of modern sensing technology, distributed control systems and communication to monitor and influence traffic. The control mechanisms are both enforced (e.g. through traffic lights and speed limits) and advisory (through variable-message signs (VMSs), traffic alerts, variable speed requests or routing suggestions). Driver compliance to both control mechanisms introduces a disruptive effect. The implementation of an ITS solution at a city, a regional, a national or an international level warrants the use of scalable, secure and safe modern distributed or cloud computing platforms to facilitate the integration and communication among multi-domains of ITS components.
This paper describes the typical ITS components involved in urban traffic management starting with the infrastructure and mobile sensors in section II, followed by traffic light intersection control algorithms in section III, vehicle-actuated traffic control (VATC) in section IV. Section V describes the different types of traffic simulators within which the aforementioned ITS components and methods can be safely evaluated. Throughout the paper, two examples of traffic simulators are used. The
II. ITS Sensor and Communication Infrastructure
Real-time data collection about vehicles, road usage and conditions plays a vital part in managing, planning and forecasting the traffic flow. Road-based data collection involves fixed devices and sensors on the traffic infrastructure. 6 Induction loops are the most common type of detectors. These are typically buried under the road at traffic intersection approaches. Their accuracy depends on the depth at which they are buried, which may change due to resurfacing, as well as the distance from a traffic-controlled intersection. They can detect a vehicle directly above them by sensing a change in magnetic flux. Coupled with appropriate software, induction loops can distinguish between vehicle types, for example, car, bus and truck and estimate the speed of passing vehicles without the knowledge (or assumption) of vehicle length. Induction loops offer a robust solution with respect to weather condition but are expensive to maintain. Machine vision solutions performing automatic vehicle detection and tracking are becoming increasingly used due to their relative ease of deployment. They can provide additional information such as bearing, range, altitude and radial velocity. They involve a range of technologies including passive cameras (operating in visual spectrum or infrared) or active radar/lidar systems coupled with image recognition software. Arrays of acoustic sensors can also be used for vehicle counting and multi-lane road monitoring by detecting the acoustic signals reflected by vehicles. Pipes can detect vehicle speed and type. They comprise two rubber tubes filled with liquid located across the road separated by a short distance. Sensors placed at the end of pipes detect the change of pressure when a vehicle drives over them. A variety of laser-based technologies can also be used to detect vehicle information. Roadside beacons can scan signals from tags on the windscreen to determine the vehicles that have entered a particular area. They are normally used in congestion charge systems. Weather sensors monitor weather conditions to assist traffic operators in managing the dynamic traffic flow which can be severely affected by the environmental conditions. There is to date a wide range of technology available, and their selection involves a trade-off between upfront cost, maintenance cost, reliability, robustness with respect to lighting conditions and weather and richness of information.1–4
In-vehicle detection technologies were initially used in vehicles belonging to traffic authorities, police and public transport. Some of these vehicles, used as probe vehicles, can provide real-time traffic data and route journey times over a period of time which are useful for traffic analysis. Traffic management can also be improved by using on-board systems providing location, speed and appropriate information. The increased use of active and passive components in vehicle vision systems is also offering new opportunities with respect to pedestrian detection, collision prevention and driver assistance for enhanced drivability such as road and terrain classification. Cameras and stereo cameras are currently cheaper alternative to laser technology for depth generation; however, their accuracy varies with the distance from the point of view.10–13
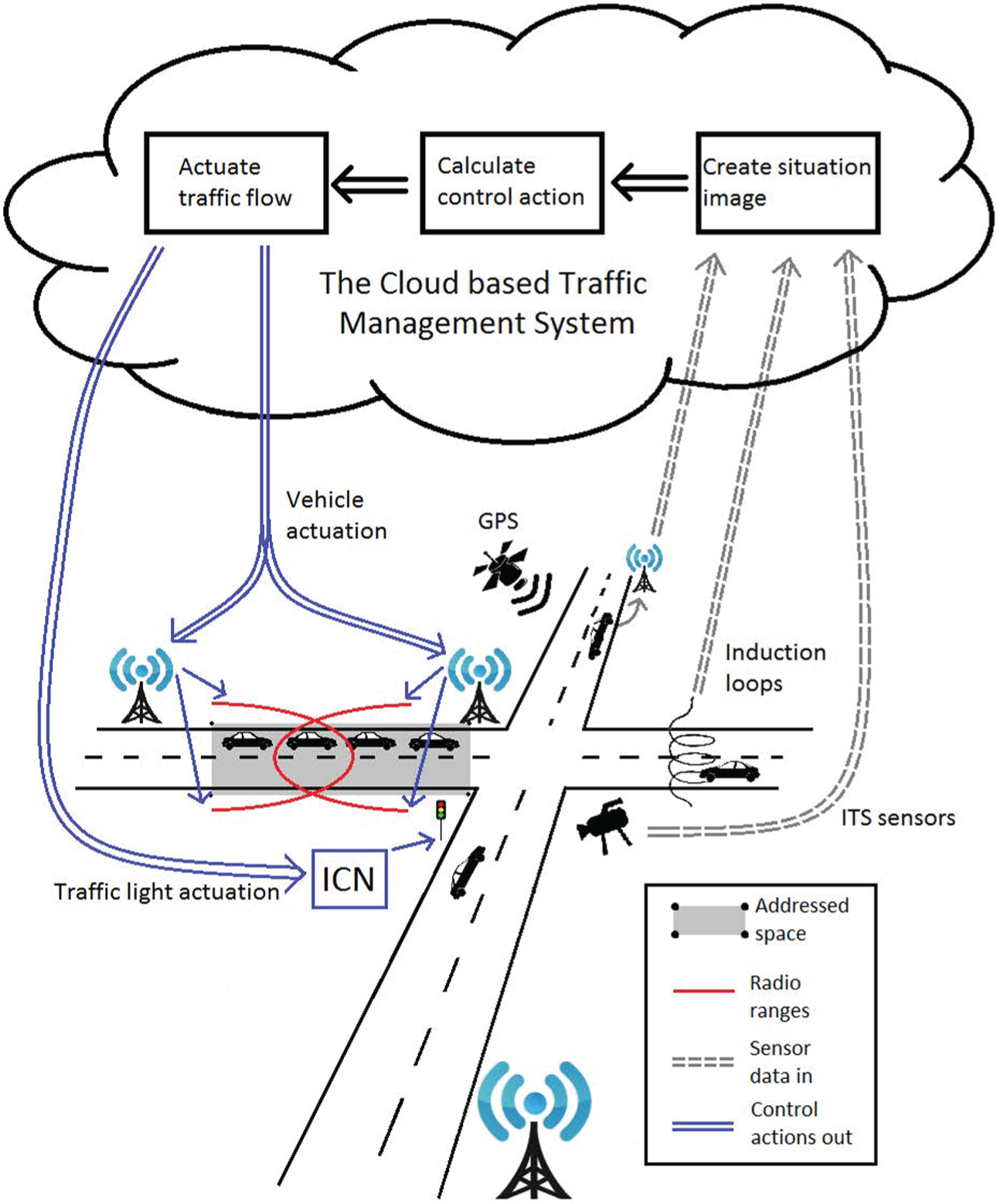
To improve the individual sensor limitations, information from sensors can be fused to provide accurate measurement or description of the environment which is a prerequisite for further classification and decision-making. Selecting a suitable fusion technique depends on the type, level and amount of information involved. Traffic management applications involve pattern recognition, artificial intelligence, neural networks, fuzzy logic, figure of merit, expert systems and algorithms based on Kalman filtering, Bayesian inference, Dempster–Shafer inference and voting logic to detect and classify multiple source data for ITS purposes such as incident detection. 14 In Jaworski et al.,3–5 a rule base is used to combine readings from multiple detectors to ensure that vehicles are not counted several times; see Figure 1 which illustrates the exploitation of infrastructure sensors to detect approaching vehicles to predict incoming traffic and to advise vehicles on the best trajectory to follow on intersection approach.
ITS solutions require information to be delivered between the vehicles or to/from the traffic infrastructure. Cooperative Adaptive Cruise Control (CACC), collision avoidance, incident response, 1 route guidance and incident detection rely on wireless vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication capabilities. The ITS network consists of both mobile (vehicles) and stationary (infrastructure) communication nodes, and its topology is in a state of constant change due to vehicle mobility. The environment varies from open rural areas to densely populated urban centres resulting in different signal propagation conditions. Network node density also varies in time and space, peaking in rush hours in urban environments and being consistently low in sparsely populated areas. Such unique circumstances have led to the development of several technologies to address the issues associated with wireless communication in vehicular environment. The vehicular ad hoc networks (VANETs) 15 define requirements for V2V and V2I communications and provide a list of applications which can be both directly related to safety and traffic performance or infotainment, for example, parking space availability, traffic congestion advice and weather forecasts. VANETs enable communication in situations where the infrastructure is unavailable or inoperable. Non-time-sensitive communications are normally realised using mobile broadband technologies while safety and traffic network performance communication rely on IEEE 802.11p referred to as wireless access in vehicular environments (WAVE). It operates on seven 10 MHz wide channels around 5.9 GHz in the frequency spectrum called dedicated short-range communications (DSRC). There are four service channels carrying the general V2x traffic; a control channel is reserved for safety communication only. A high-power public safety channel is usually used by the roadside equipment to broadcast road state and safety information. A critical ‘safety of life’ channel is used in emergencies only. Having described the means to monitor traffic and vehicle interaction, the following two sections focus on methods to exploit such information.
III. Intersection Control Algorithm
This section focuses on intersections governed by traffic lights. Controllers aim to determine the most appropriate signalling stage duration, based on current and predicted traffic, using measures linked with pollution, journey time and queue time.
The most common intersection controller is referred to as fixed timing or fixed cycles (FC) control. FC activates each traffic flow for a predetermined period of time. The timings are optimised offline based on statistical data. FC relies on appropriate commissioning and maintenance to update the statistical models underpinning the timing plans. This approach is analogous to feedforward control. FC traffic control is simple, usually effective for routine situations but cannot respond appropriately to unforeseen changes in traffic flow caused, for example, by incidents or special events. 14 One of the greatest advantages of FC is that information about the future state of the traffic lights is available in advance at all times. Such knowledge can be exploited to optimise vehicle approach to the intersection.6,16–20
Adaptive intersection control uses feedback from sensors detecting the current traffic situation to adjust the signalling stages with the aim to minimise, for example, delay, energy consumption or CO2 emissions. Split Cycle Offset Optimisation Technique (SCOOT) can iteratively increase or decrease the FC signalling stages depending on traffic demand. 15 Such an incremental approach prevents the intersection controller from reacting quickly to high-magnitude changes in traffic flow. However, the inherent safety of the small incremental changes makes it robust to erroneously detected vehicles or sudden but short traffic fluctuations. Another predictable and robust solution is to select the stage length from a set of predefined traffic cycles. Self-organising traffic controllers are capable of greater adaptation and can create their own traffic cycles depending on the demand. 6 Agents, which are software entities, have received significant interest due to their autonomous nature, their ability to make their own decisions based on their desires as well as past behaviour of other agents. In ITS applications, agents represent vehicles, ITS infrastructure and decision-making strategies forming a multi-agent system (MAS) cooperating through negotiation to reach a globally acceptable solution. MAS can be deployed on large-scale distributed systems.2,21 Solutions are reached by applying a set of rules. These rules are situation specific. For example, in the case of saturated traffic condition, the best is to minimise the number of cycles thereby reducing the time required for vehicles to accelerate and decelerate. In all other cases, gains can be obtained by taking into account traffic flow fluctuation as well as prioritising groups of moving vehicles. The effectiveness of the rules or strategies adopted depends, for example, on the infrastructure, geographical specificity and policies restricting commuter traffic to specific areas within a city.
IV. Vehicle-Actuated Traffic Control
VATC gives standard or individualised instructions to vehicles to follow specific trajectories and route to optimise waiting times and fuel consumption. VATC relies on a wide uptake and improved reliability and security of communication technology on-board vehicles as well as on the whole road network. To date, vehicle actuation methods are reduced to support role for traffic light–based intersection control in urban environment but can still result in significant reduction in fuel consumption and CO2 emissions. Examples of terminology used for this family of solutions optimising the approach to intersection include Eco Cooperative Adaptive Cruise Control, Green light Optimised Speed Advisory and predictive cruise control.6,16–19 Even without communicating with the infrastructure, cooperative driving can improve travel time and fuel consumption. The objectives of cooperative driving are to minimise the distance to the preceding vehicle (in order to maximise road utilisation) and to keep a safe separation gap. There is a trade-off between inter-vehicle gaps and platoon stability. Small gaps could increase throughput but are likely to lead the controller to overreact using large control actions due to the fast reaction required. Such behaviour would propagate and amplify inter-vehicle spacing errors leading to reduced platoon stability. The desired separation between vehicles, defined as time headway spacing policy, is calculated as a function of vehicles’ speed and time headway. The time headway parameter can either be constant or vary in response to the road conditions or the manoeuvres the platoon is undertaking. Constant time headway policy is used in Adaptive Cruise Control (ACC) to maintain speed or slow down and engage in platooning when it encounters slower moving vehicles. CACC uses V2V to gain information on the intention of the preceding, and in some instances following, vehicles with the aim to minimise separation gap as well as speed and acceleration differences between the vehicles in the platoon. CACC reduces the likelihood of overreactions and enables coordinated platoon manoeuvres. Communication delays in the wireless network can impact string stability in CACC platoons and should therefore be taken into account in the time headway calculation.
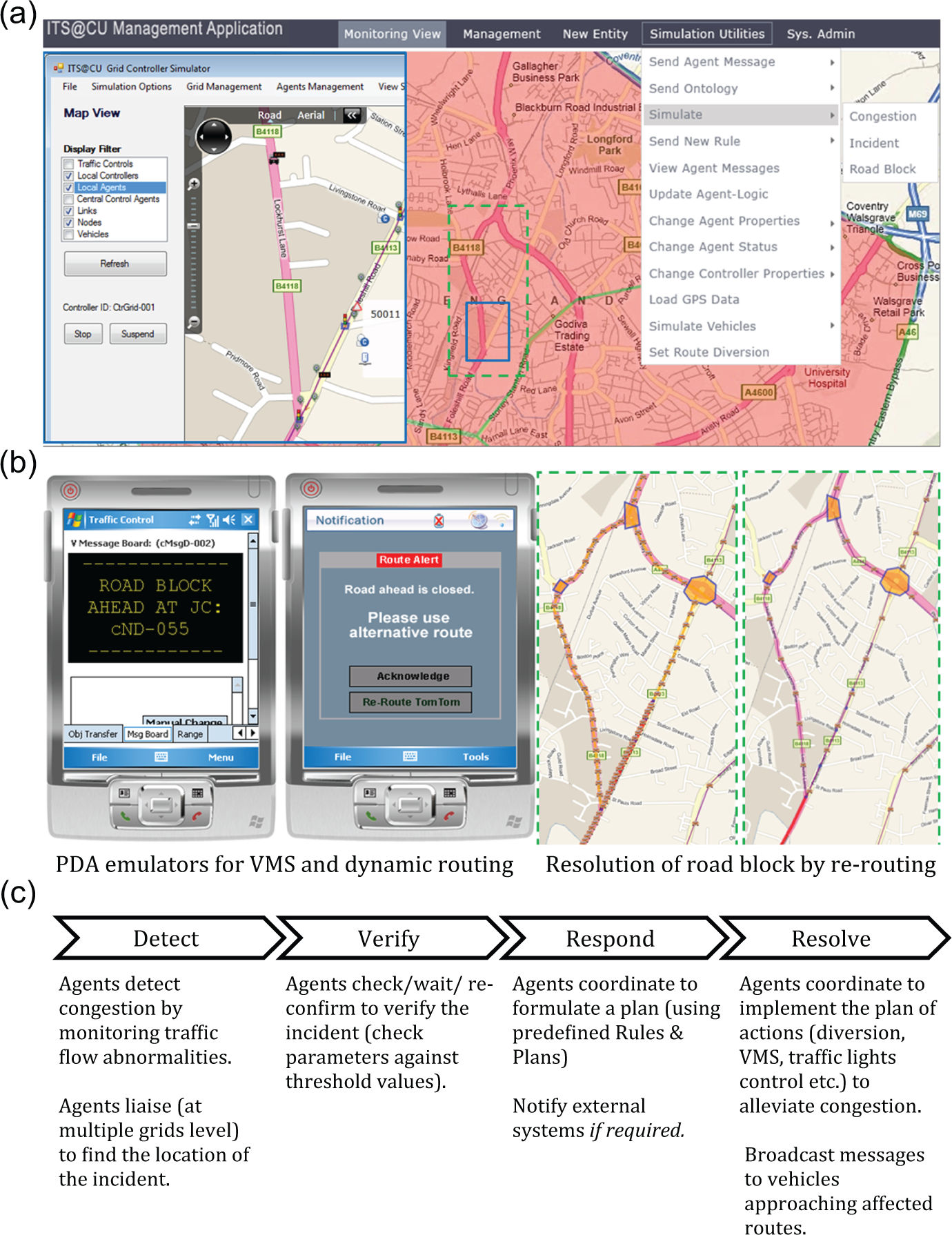
Rerouting traffic is one of the most effective methods to keep the load on the road network balanced and respond to incident blocking part of the network. Routing solutions included weighted graph search and traverse algorithm 22 or heuristic strategies. In Kamran and Haas, 2 routing available from Bing map is used in conjunction to general traffic alert and VMS for drivers not equipped with mobile devices or routing software with live updates; see section V. In Jaworski et al.,3–5 routing uses the depth-first search algorithm in combination with dynamic edge weight calculation. It has been found that most benefits arise from rerouting 20% of vehicles, especially if these vehicles can engage in CACC, with little benefits arising from rerouting more than 40% of vehicles.
V. Traffic Simulator
There are to date a number of potential solutions to alleviate issues associated with increased traffic and finite resources. Traffic simulators can help identify the most appropriate set of solutions for specific circumstances. Central to any traffic simulator is the traffic flow model. Traffic models have been classified according to scale of values (continuous, discrete and semi-discrete), level of detail (nanoscopic, microscopic, mesoscopic and macroscopic), predictability of an algorithm (deterministic and stochastic), source of data (analytical and simulation) and processing area (networks, stretches, links and intersections).6,23 This work focuses on classification according to the level of details.
Macroscopic simulators use equations derived from fluid dynamics to calculate the flow of vehicles. Examples of macroscopic traffic models include (1) TRAffic Network StudY Tool (TRANSYT) used within SCOOT, (2) MASTER which uses gas-kinetic and pressure changes to represent spatial vehicle density (3) multi-commodity discrete kinematic wave (MCDKW) which categorises the vehicles into multiple commodities differentiated by the paths the vehicle takes and uses kinematic wave theory to simulate the multi-commodity traffic. The ability of coloured timed Petri nets (CP nets) to model concurrency, communication and event synchronisation has been exploited to simulate traffic networks in terms of states and conditional transitions. 24 Simulators based on directed graphs separating roads into small segments within which flow models are used include METANET, METACOR, STRADA and NETCELL. 24
Microscopic models include cellular automaton based on NaSch models where each road is divided into cells with the speeds of vehicle movement being quantified and dependent on the cell granularity. INTEGRATION uses a vehicle-following (platooning) approach to model behaviour of individual vehicles on their lanes as well as traffic lights models with detailed signalisation plans. The Traffic Software Integrated System – Corridor Simulation (TSIS-CORSIM) is a set of tools designed to analyse freeway and urban traffic. It is achieved by combining two models: FREeway SIMulation (FRESIM) which is used to simulate traffic on motorways and NETwork SIMulation (NETSIM) which simulates urban environment. Vissim is a well-established platform capable of simulating complete traffic environments including general vehicle traffic, public transport vehicles, bicycles and pedestrians. It has been used for simulating motorway networks as well as combined motorway and urban traffic conditions. One of its most interesting features is its psycho-physical driver model for inter-vehicle gap keeping. Simulation for Urban MObility (SUMO) is a mature and robust open source set of traffic simulation tools capable of importing road network layout data in various formats, modelling emissions, noise, driver behaviour, intermodal transportation and vehicle models validation. 6 One of most interesting features of SUMO is the capability to simulate V2V and V2I using Traffic and Network Simulation Environment (TraNS) to simulate the network communication. iTETRIS is an extension to the SUMO-TraNS coupling featuring cooperative traffic management.
Mesoscopic models, similar to microscopic models, simulate individual vehicles but in a simplified manner, without separation gap or lane-changing behaviour and with simplified model of traffic cycle timings.
23
They are mostly used in route choice decision. This definition makes
Macroscopic models are well suited to large network simulation as the computational cost does not increase with the amount of vehicles simulated. Microscopic modelling can investigate individual entities in the traffic network from vehicles to road-based sensors in details. The cloud-based ITS traffic simulator models lane change and separation gaps and includes nanoscopic elements such as a simplified vehicle model able to simulate an individualised acceleration and braking profiles.3–5
Simulating and interacting large and distributed ITS systems have prompted researchers to exploit the capabilities of distributed and cloud computing.2,4,6,21,25 Grid computing provides a scalable distributed computing environment meant for solving large, computationally intensive problems. Cloud computing aims to provide a universal execution platform. The primary focus in cloud is the scalability and transparency of the platform. Both cloud and grid are service-oriented architectures (SOAs). Grid follows the software-as-a-service (SaaS) approach. Cloud exposes services at three levels: SaaS, platform as a service (PaaS) or infrastructure as a service (IaaS). SaaS provides users with access to purpose-built software components. PaaS provisions access to a high-level platform to enable users to deploy their own services. IaaS provides users with access to hardware platforms with managed (often priced) access to resources enabling them to deploy wide variety of software. 25
The
VI. Conclusion
ITS involve complex, distributed and heterogeneous components required to communicate effectively to enable urban traffic controllers to make the best set of decisions in order to improve traffic flow and resolve incidents. Traffic simulators can provide a valuable tool to simulate the effect of different strategies and their associated technological and cost requirements. There are four main types of simulators: nanoscopic, microscopic, mesoscopic and macroscopic. In this work, an agent-based simulator
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.