
Abstract
In recent years, shape memory alloys have been used widely as actuators in microelectromechanical systems. Shape memory alloys have non-linear hysteresis behaviours and parameter uncertainties that include electrical properties such as resistance. These behavioural uncertainties limit the control accuracy of shape memory alloy actuators using mathematical models. In this article, a new method is proposed for force control of shape memory alloy spring actuators. An artificial neural network is used to identify and control the shape memory alloy actuator. The shape memory alloy spring under test is a product of the Toki Corporation; its coil diameter is 0.62 mm, the diameter of the wire is 0.15 mm, and this type of shape memory alloy actuator can produce 40 gf. The results obtained are verified by an experimental set-up, which is also used to train the artificial neural network as an identifier and a controller of the system.
I. Introduction
Progress in technology is matched by progress in its component parts. Microelectromechanical systems (MEMS) have revolutionized modern control technologies by being able to be applied to many different domains. These MEMS devices are based on actuators that have different mechanical, electrical and thermal characteristics than conventional materials. Their most attractive ability is that they return to a predetermined shape when heated. As such, shape memory alloy (SMA) actuators have both a large force-to-weight ratio and force-to-length ratio; they are used in application fields where size and weight are considered as limitations. 1 However, despite all their benefits, these alloys have non-linear hysteresis behaviours; so finding a way to control their force is an essential issue. Most methods used for the control design need the dynamics of the systems to be known. Although there are several relational models between stress, strain and temperature for wire SMAs,2–5 for SMA springs, less knowledge and understanding is available regarding the guiding equation.6–9 Available models are seldom complete, in which there exists a paradox between accuracy of the model and the complexity of the control design. In addition, these models are not complete. And using an accurate model of SMA spring makes the control design more complex. To overcome these difficulties, an artificial neural network (ANN) method for SMA modelling has been introduced to evaluate the characteristics of the SMA spring. 10 Thus, in this article, the control design is implemented based on an unknown model.
In the last decade, many studies have been performed to find a reasonable method to control these ‘force on wire’ and spring-based MEMS actuators. The most widely used method to control the ‘force on wire’ form of a SMA is the fuzzy-based Preisach model;11–13 other methods such as inversion-based control with time-varying gains 14 and adaptive control 15 have also been tried. For the spring-based MEMS actuator, a fuzzy controller has been attempted.16,17
ANNs can be a powerful tool for identification and control. They enable one to identify and control a system without the need of knowledge of its dynamics. In addition, there is no limitation as to whether the system is static or dynamic, or whether it is linear or not. Due to the ability of ANNs to learn from experimental data, their use is widespread: for example, in the position control of a SMA spring-based actuator18,19 and to model and control hysteresis behaviours in piezoelectric actuators.20,21
Since the use of SMA spring-based actuators has grown in recent years, this article presents a simple yet useful method to identify and control them. An ANN is used to identify the dynamics of the SMA spring, and an open-loop control system for SMA force is used based on an inverse ANN. All results were verified by experimental tests.
This article is organized as follows. Section II explains the experimental set-up used in this study. Section III describes the use of ANNs for identifying the characteristics of the SMA spring. In Section IV, the control method is introduced and the experimental results are presented, and conclusions are drawn in Section V.
II. Experimental Set-Up
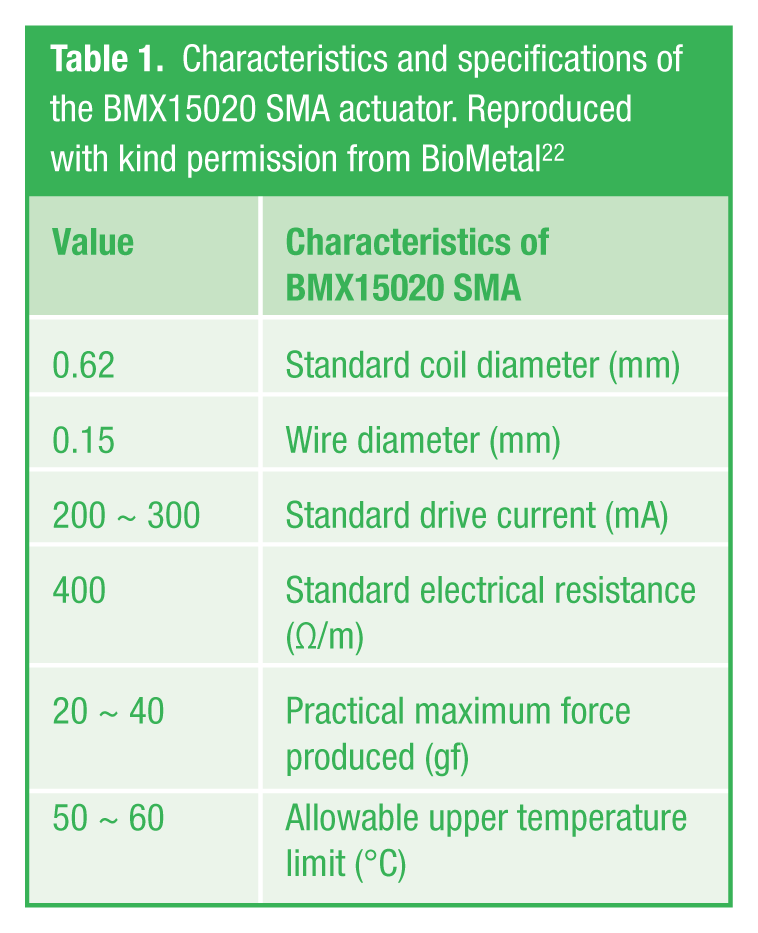
The SMA spring used in this study is a BMX series from the Toki Corporation. Its characteristics are shown in Table 1 . To demonstrate the size of the component spring see Figure 1 , where a typical spring used in this study is compared to a normal-sized pencil.
Characteristics and specifications of the BMX15020 SMA actuator. Reproduced with kind permission from BioMetal 22
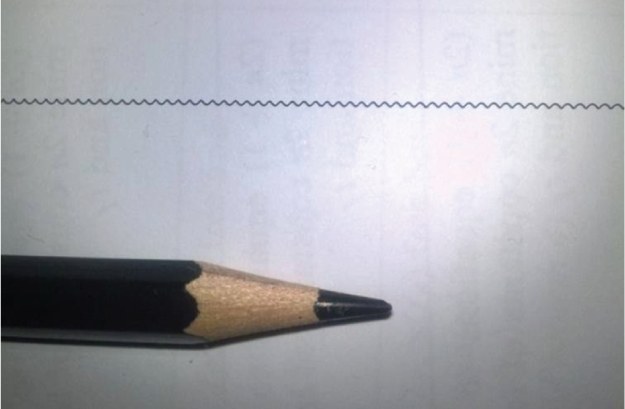
Size comparison: the BMX15020 SMA spring and a normal-sized pencil
An experimental testing system was built to enable the measurement of the force of the SMA spring by applying different voltage ranges. The set-up included a load cell which measures the force, an amplifier for reinforcing signals, a buffer circuit, and a PC-based digital data acquisition unit (Advantech® PCI – 1716) as a connection between computer and amplifier. In Figure 2 , a block diagram of this set-up is shown. In this figure, the connections between instruments and the flow of data are displayed. For control system simulation, the real-time workshop of MATLAB®/Simulink software was used.
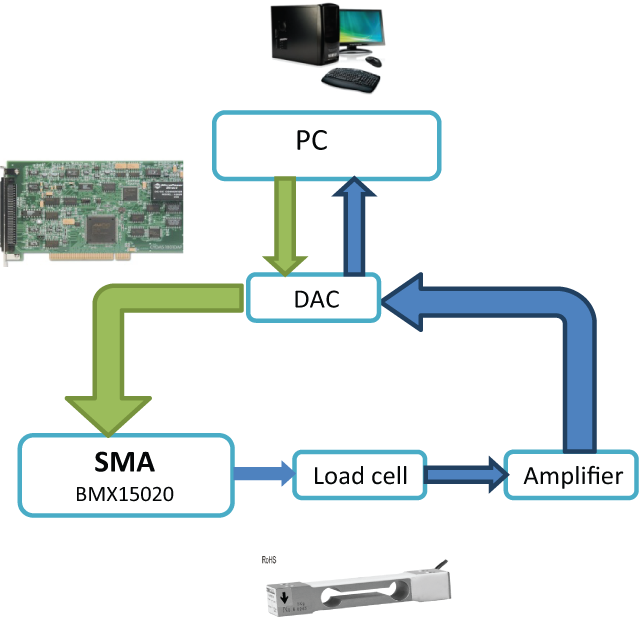
Block diagram of experimental set-up
In Figure 3 , the experimental set-up is shown via an annotated photograph.
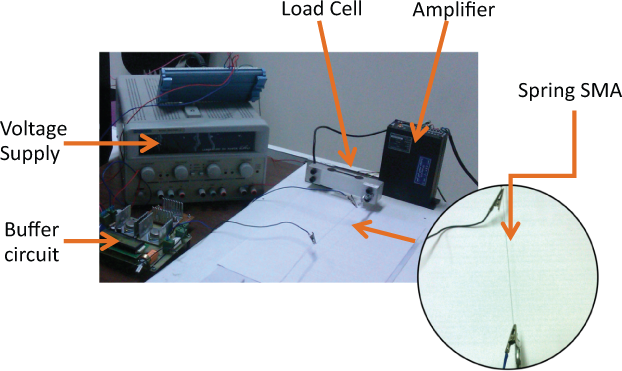
Experimental set-up
As mentioned previously, an ANN was used to identify the model of the voltage-force characteristic of the SMA spring and then its force is controlled based on an unknown model. By fixing the length of the SMA spring, all the experiments were done at a specific level of strain. In this case, different ranges of voltages are applied to the SMA spring and then different forces are generated by the actuator. To identify the dynamics of the SMA spring, three sinusoidal voltage signals with amplitude between 0 and 3 V and frequency of 0.4, 0.8 and 1 rad/s were applied. In Figure 4 , one set of these data is shown. As it is obvious from Figure 4 , the SMA spring actuator has no repeatable force generated since ambient conditions cannot be controlled. 17
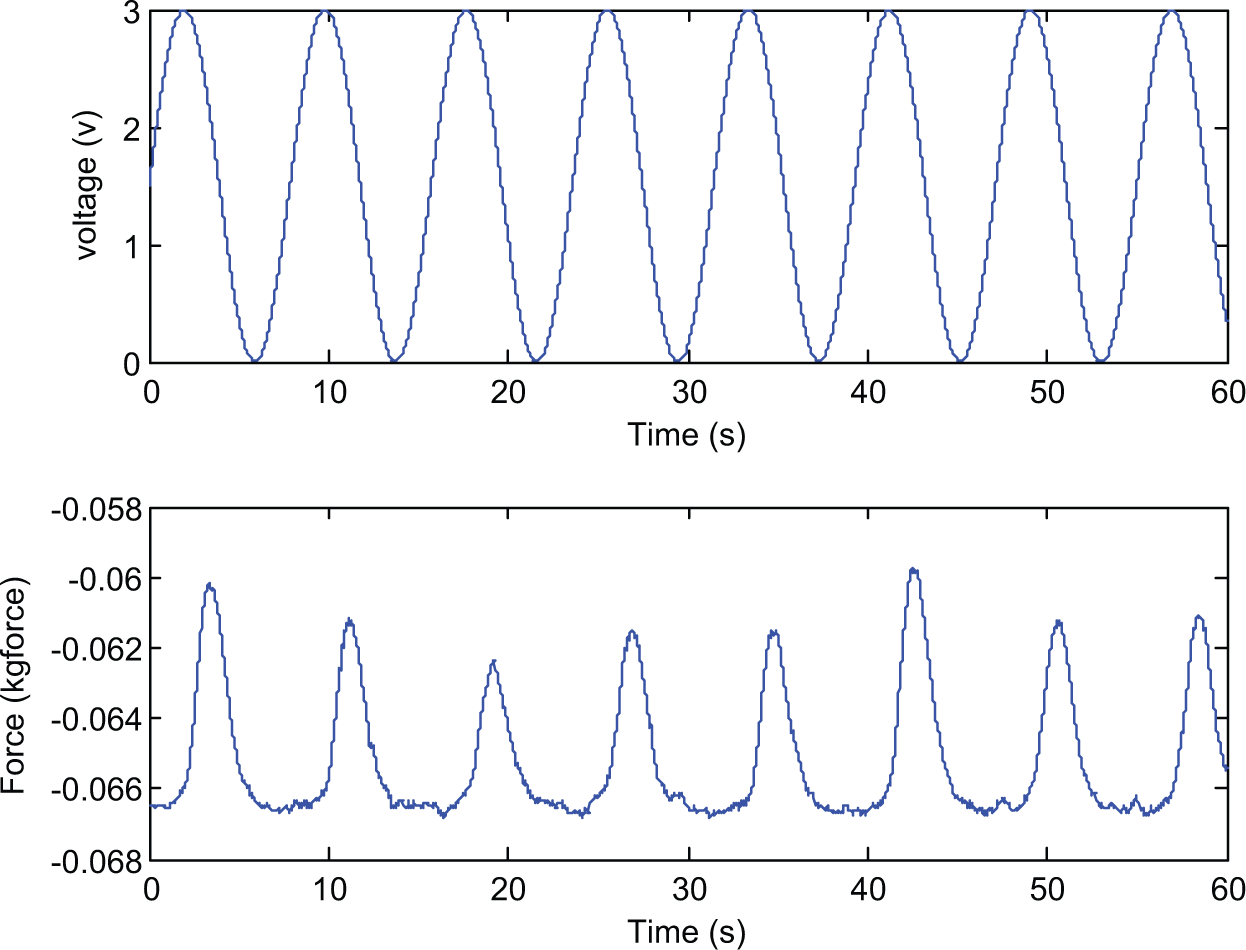
Sinusoidal voltage signals with frequency of 0.8 rad/s and force of SMA
III. Identifying the Characteristic of the SMA Spring Using a Recurrent Neural Network
Since SMA springs have non-linear behaviours, one of the best ways to identify the dynamics of this system is to treat it as a black box and then find a relation between input of the system or voltage and force of SMA by experimental data. ANNs are among the best methods with a capability of mapping non-linear relations. When the relation is time dependent, the system is called a dynamic system. For this class of systems, a recurrent ANN is useful as it has a feedback signal from its output to the next sample of time. For the SMA spring actuator, as the produced force is related to the temperature of the SMA spring and as its temperature has a relation with time, this system is considered as dynamic. So for identifying this relation, a recurrent neural network is used with seven neurons in its hidden layer and with a sigmoid-shaped activation function. To increase the accuracy of the ANN, two past data values for voltage and force are also used. Figure 5 depicts a schematic of the ANN deployed.
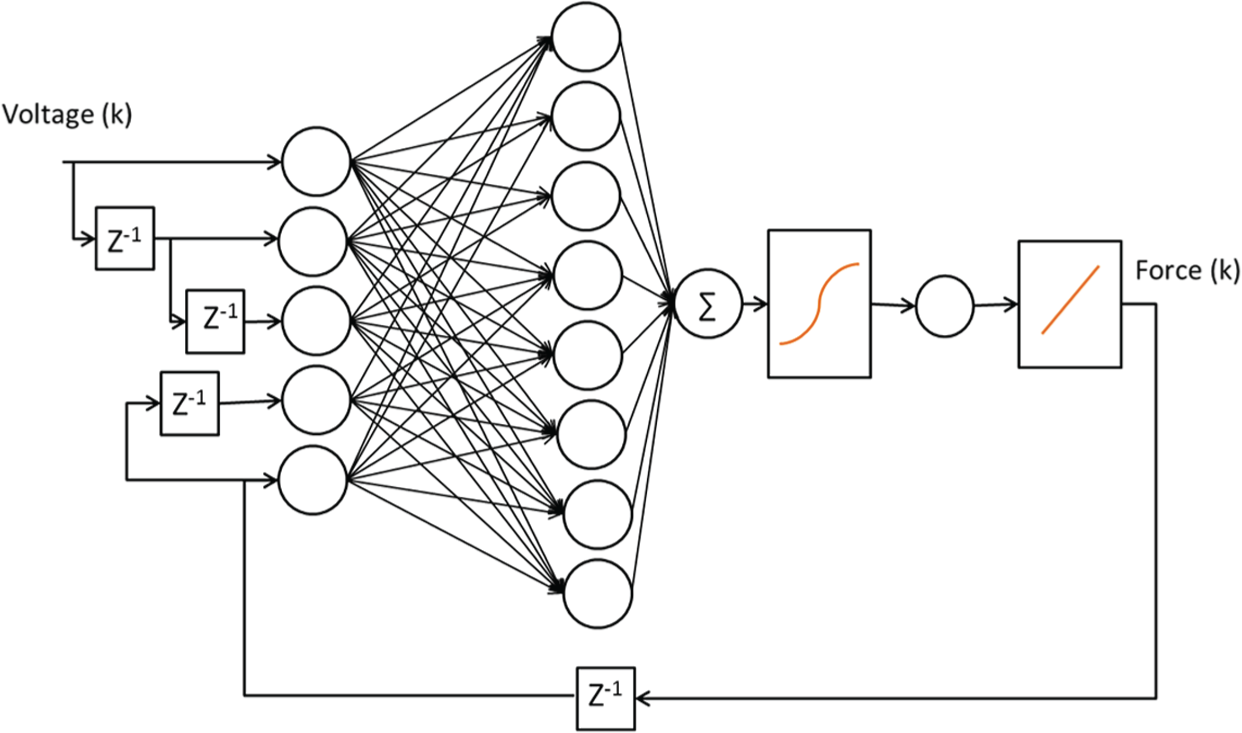
Architecture of the ANN identifier
To validate the results of the trained ANN, a new set of experimental data which was not used in the training of the network was prepared. A new voltage waveform was set, which was in the form of a sawtooth wave, as shown in Figure 6 . In the first part of Figure 7 , the force produced by SMA and the result of the trained ANN are shown. The second part of Figure 7 depicts the error of these results in real values. As shown, the error of this simulation is less than 2% except in places where there are sudden changes in voltage.
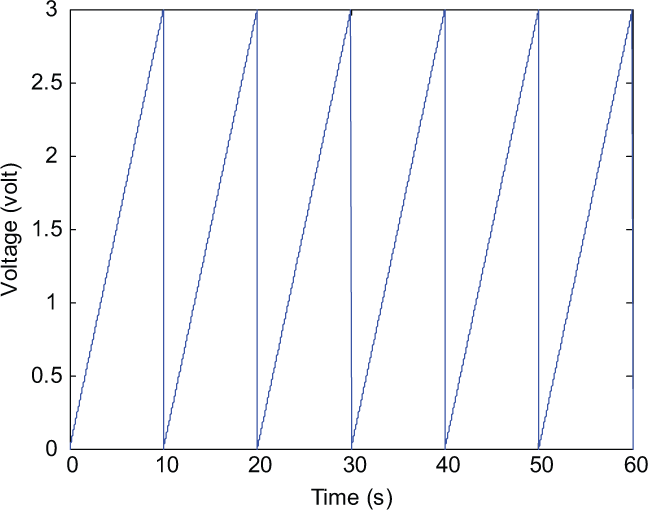
New voltage waveform
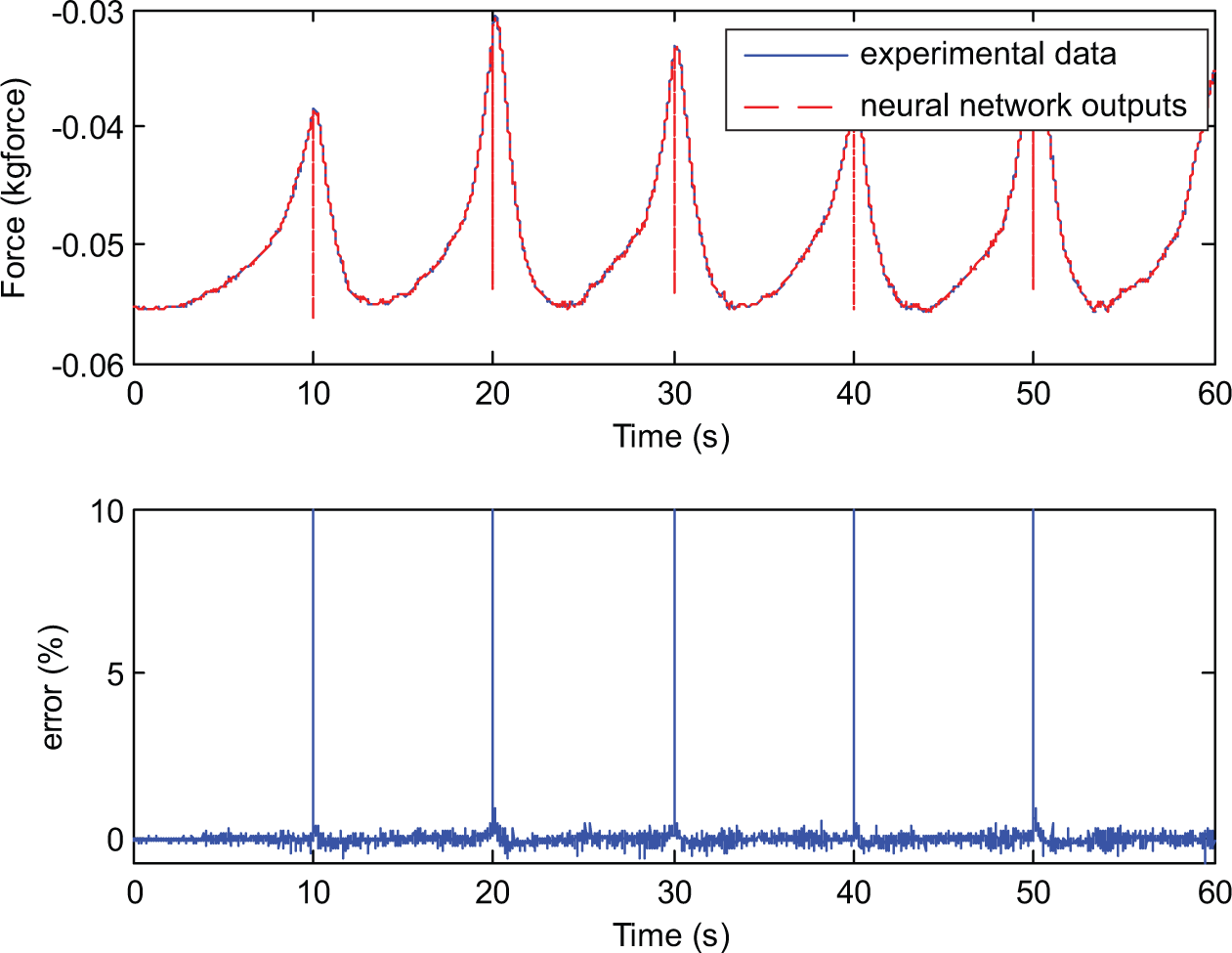
Force of SMA and the result of identifier neural network
IV. Control SMA Spring Design Using an Inverse recurrent ANN
As mentioned above, the ability to control the force of the SMA spring actuator is a considerable issue. One idea to address this matter is to use the inverse of the dynamics of the system to control this type of actuator. Thus, it is suggested that as a simple solution, the inverse of the ANN that produced the dynamics of the SMA spring can be used as a controller. The precision of this controller is highly dependent on the error of the trained inverse ANN, which has a feedforward controller role. Figure 8 shows that the trained inverse ANN is identical to the ANN adopted for identification purposes, except that its input and output are juxtaposed.
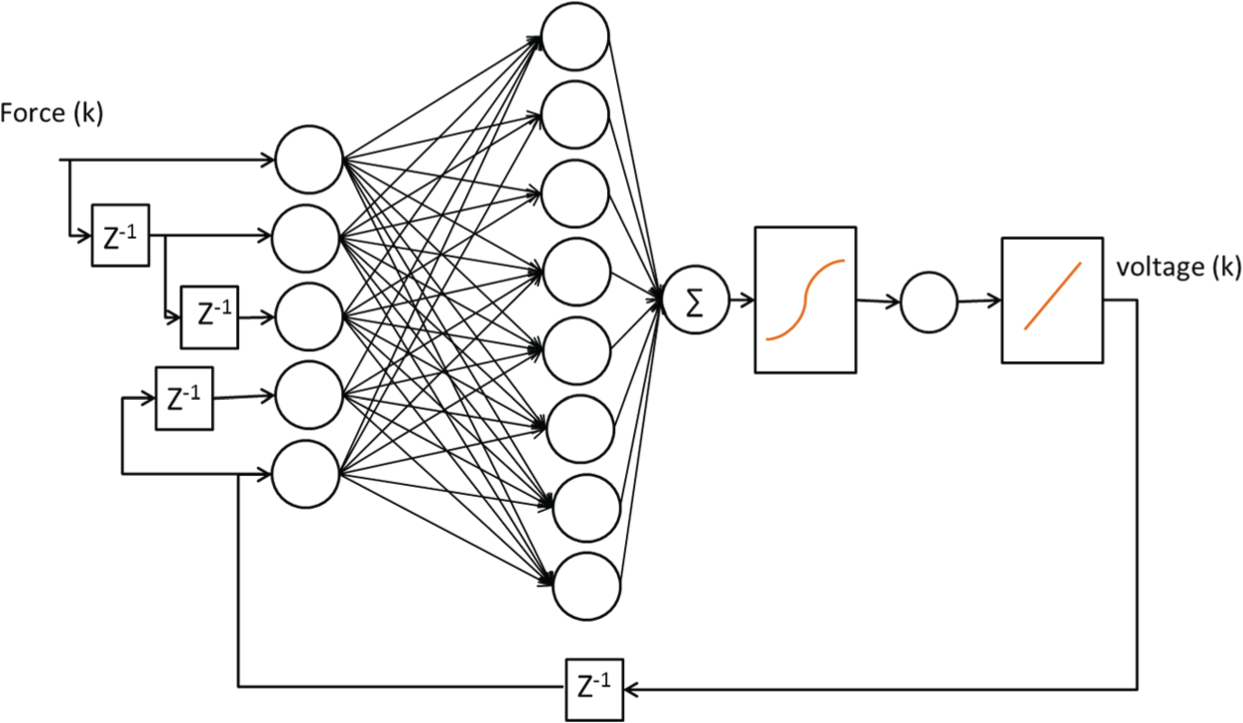
Architecture of the inverse ANN
After the inverse ANN was trained, it could be used to control the force induced in the SMA spring. To obtain better results, it is possible to use the error of the control system to update the weights of the network online.
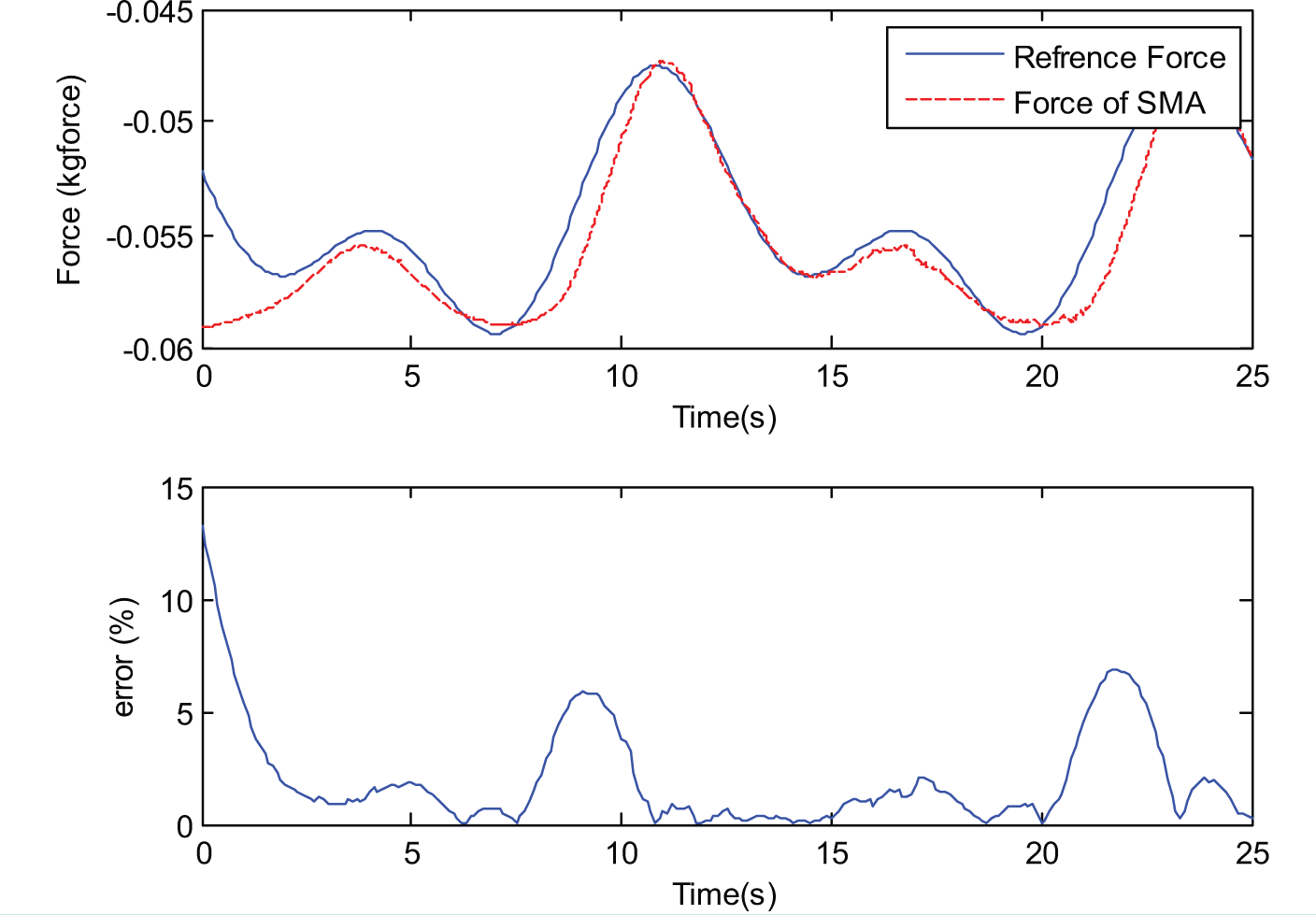
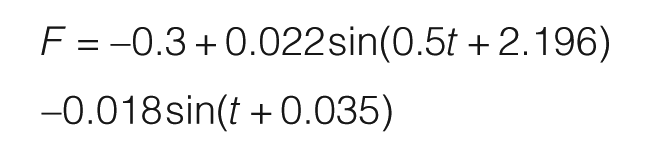
To show the performance of this feedforward controller, two different reference forces are considered, obtained by using the experimental set-up described earlier. Equation 1 shows a mathematical representation of the first reference force, F.

The graphical representation of model-based and measured forces together with their error is shown in Figure 9 ; the voltage that must be applied to the SMA spring to achieve these behaviours is shown in Figure 10 .
The result of experimental control of SMA
Voltage applied to SMA
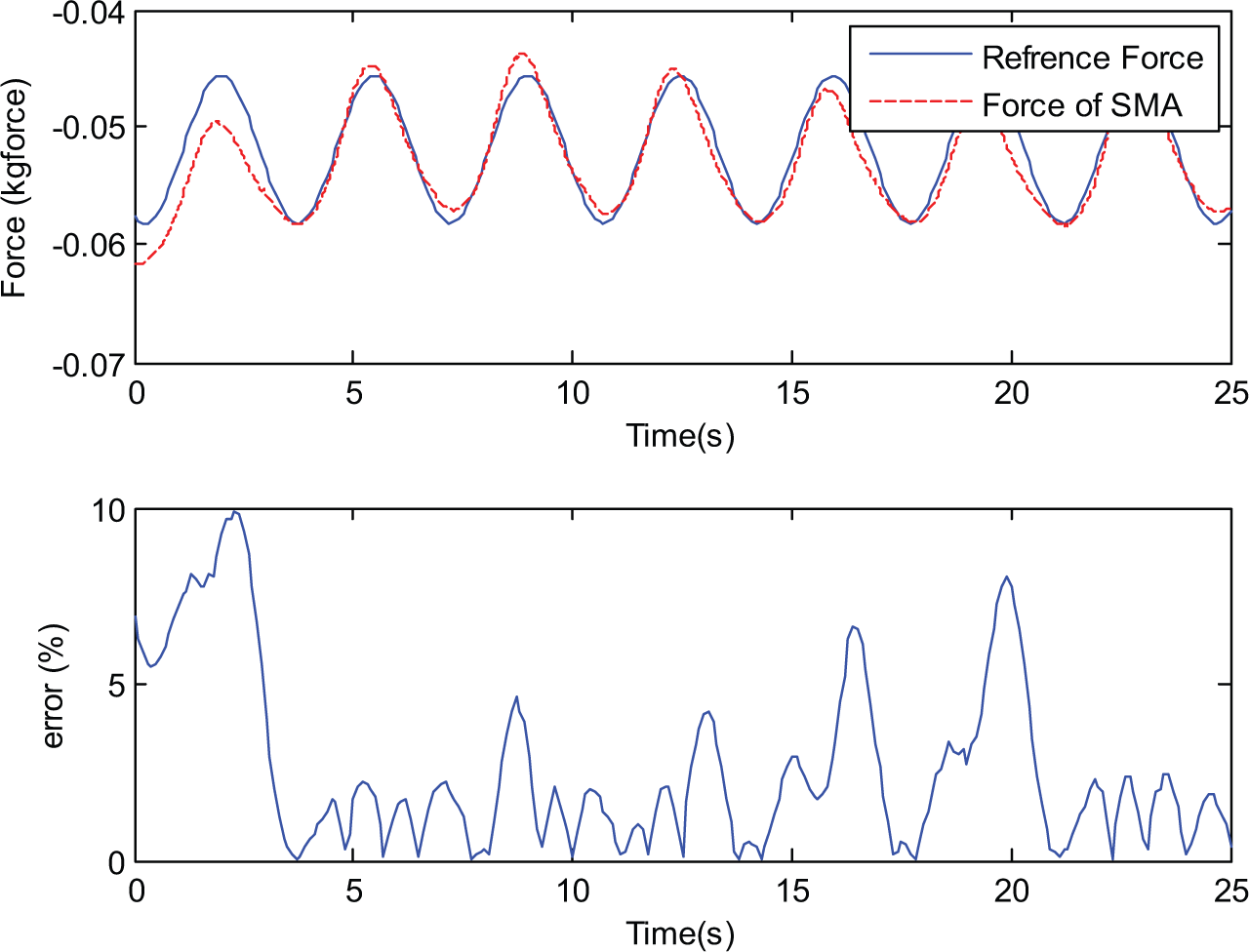
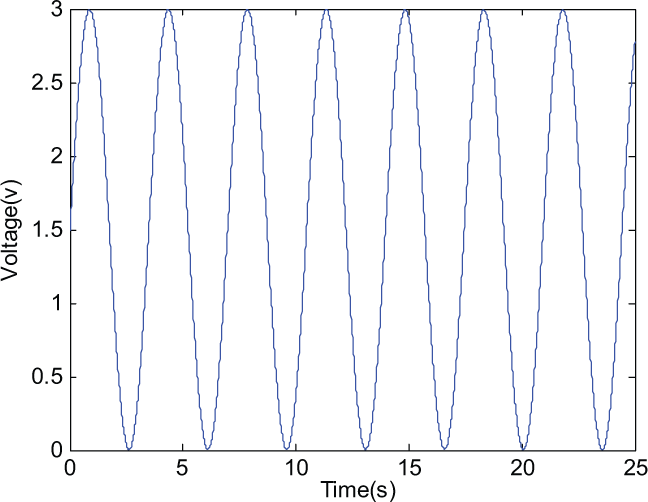
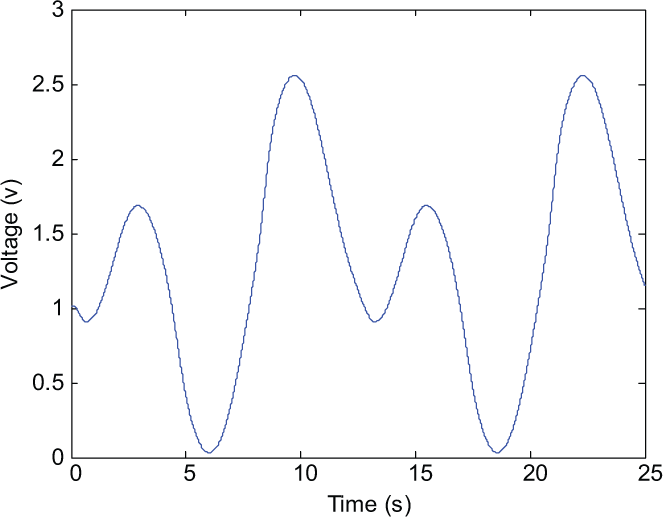
Equation 2 is the sum of sinusoidal forces, which is used as a reference force in the control system. The result of the SMA spring and its error with the reference is shown in Figure 11 . Figure 12 shows the voltage given to the SMA spring for obtaining the result shown in Figure 11 .
Results of experimental control of the SMA spring
Voltage applied to SMA
V. Conclusion
One problem in identifying SMA springs correctly is their response to sudden changes in voltage. In addition, in controlling this actuator, there is a delay in response of SMA at the first time of applying voltage. Except in the first period, the errors in both series of reference forces, as shown in Figures 10 and 12 , are less than 5%. Moreover, with this method, it is possible to track all kinds of desired forces. The experimental results showed that the feedforward ANN controller proposed in this study demonstrates good results for this SMA spring actuator and also it is simple and fast for implementation. As mentioned before, the SMA alloys are not repeatable and changes in ambient conditions have strong effects in the response of actuator.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.