
Abstract
Objective
Assess the effects of arm support exoskeletons (ASEs) on dynamic balance during dynamic tasks.
Background
ASEs can reduce muscle activation during labor-intensive tasks, potentially alleviating fatigue, discomfort, and injury risk. However, implications on worker safety, particularly regarding altered balance, remain a concern.
Methods
We evaluated the effects of three different ASEs on dynamic balance using postural sway parameters and the dynamic postural stability index (DPSI). Twenty-three healthy volunteers (7 F) performed a single-leg, step-down maneuver with and without ASEs.
Results
Sway did not differ substantially across conditions, except for a slight increase in sway area in one comparison (18.3%, η p 2 ≈0.07). In contrast, DPSI increased in all ASE conditions compared to no-ASE (6.1–10.1%, η p 2 ≈0.05–0.10). A main effect of sex was found for sway and dynamic stability metrics, with females exhibiting greater postural excursions (13.5% higher sway and 9.3% higher DPSI on average, η p 2 up to 0.24). Height and body mass were negatively correlated with sway and DPSI parameters, suggesting a potential role of individual anthropometrics in modulating balance performance.
Conclusion
ASEs do not impair balance during dynamic tasks such as a step-down maneuver and single-leg stance, but they may affect stabilization strategies, especially for individuals with low body mass and height.
Application
These findings support the potential for a cautious integration of ASEs in industrial settings, as these devices appear to have a minimal impact on balance during moderately dynamic tasks, but observed differences in DPSI highlight the need for careful evaluation in specific populations.
Introduction
Recent advancements in exoskeleton technology have led to their gradual integration into different occupational sectors. Among the various types of exoskeletons, arm support exoskeletons (ASEs) have been developed to support the functional capacity of the shoulders, alleviating the substantial muscle loads typically required during tasks performed at or above shoulder level (de Vries & Looze, 2019). In the case of passive ASEs, this alleviation is achieved through a passive energy storage device (e.g., gas springs) that assists the user during arm elevation (Zhou & Zheng, 2021). The potential to reduce physical demands makes ASEs particularly relevant for industries like construction, wherein workers have a higher risk of musculoskeletal disorders (MSDs), up to ∼1.7 times higher than in other sectors (BLS, 2022a). By potentially reducing physical demands in such environments, ASEs have been investigated for their ability to mitigate MSD risks (de Looze et al., 2016; Del Ferraro et al., 2020; McFarland & Fischer, 2019; Zhu et al., 2021). However, there are also perceived barriers to exoskeleton use, underscoring the need for a careful, comprehensive approach to implementation (Behjati Ashtiani et al., 2025; Gutierrez et al., 2024). These barriers can be broadly categorized into social and practical factors. Social barriers include initial skepticism, peer teasing, and generational differences in acceptance, while practical barriers mainly relate to usability and safety, such as discomfort, restricted range of motion, limited compatibility with personal protective equipment, and potential hazards in confined or complex work environments.
More effective adoption of ASEs could be supported by comprehensive evaluations of their biomechanical implications. Evidence supporting a reduction of shoulder muscle activity during overhead work tasks has been well documented, suggesting utility across various work scenarios (e.g., Butler et al., 2015; de Looze et al., 2016; de Vries & Looze, 2019; McFarland & Fischer, 2019). Nonetheless, concerns have been raised about potential adverse effects, including postural muscle stress and altered balance control, as well as the potential to increase spinal loading and alter motor control (Desbrosses et al., 2021; Fourcade et al., 2014). Analogous research has already examined the impact of external loads on human balance and mobility, particularly within the military (LaGoy et al., 2020; Sell et al., 2013) and occupational contexts (Pau et al., 2012; Qu & Nussbaum, 2009; Zagrodny et al., 2021). Investigations into the distribution of mass using backpacks have highlighted that asymmetric loads can shift the center of gravity and destabilize an individual (Knapik et al., 1996; LaGoy et al., 2020; Sell et al., 2013), while a uniform distribution of mass does not seem to substantially compromise postural stability (Li et al., 2019).
When additional loads are incorporated into wearable assistive devices, such as exoskeletons, biomechanical and functional challenges may arise. Most studies on wearable support exoskeletons have focused on their capacity to reduce muscular load, yet there is growing interest in their potential effects on postural balance, an issue particularly relevant in dynamic and unpredictable environments such as construction or manufacturing, where the ability to maintain or recover balance is crucial for safety. Potential drawbacks of exoskeletons have been found, including increased injury risks (Kranenborg et al., 2023), mainly attributed to impaired abilities in walking and climbing steps, as well as heightened susceptibility to trips and slips (Baltrusch et al., 2018; Kermavnar et al., 2021). Previous research on back-support exoskeletons suggests that these devices may compromise balance recovery following unexpected perturbations and altered gait kinematics (Park et al., 2022; Park et al., 2024). Although less is known about ASEs, their biomechanical characteristics may likewise influence postural control, especially during transitions or tasks requiring rapid compensatory responses.
This influence may arise from several interacting factors. ASEs introduce additional mass and inertia around the upper body, which may delay or modify postural adjustments. Moreover, the mechanical constraints imposed by the device on the arms and shoulders can restrict natural movement patterns, potentially interfering with reactive strategies used to restore balance. Finally, the redistribution of mass may shift the user’s center of mass, subtly altering balance control mechanisms even during relatively simple tasks.
Thus, ongoing research is examining balance impairments caused by exoskeletons (Dooley et al., 2024). Quantifying changes in these biomechanical aspects is crucial, particularly within the construction sector, where variable and unpredictable working conditions contribute to a high rate of falls, slips, and trips, which accounted for nearly half of all fatal incidents of this kind in 2022 and an annualized rate of 31.5 nonfatal cases per 10,000 workers requiring days away from work (BLS, 2022a; BLS 2022b). The ability to adapt postural responses to external forces is crucial for maintaining balance during dynamic movements, such as walking or transitioning between postures. Given the complex sensory and neuromuscular coordination required to maintain postural balance (Ivanenko & Gurfinkel, 2018), assessing the influence of ASEs on balance dynamics is of primary importance.
Therefore, we investigated how ASEs affect dynamic balance to better understand their influence on postural behavior during dynamic tasks. We examined different exoskeleton designs, mechanisms of action, and operational states, as well as potential sex-related differences. We hypothesized that using ASEs would negatively affect dynamic balance. Specifically, we expected that wearing an ASE would impair postural stability due to the additional mass and mechanical constraints introduced by the device, potentially limiting physiological movements. Such effects may be particularly evident during dynamic tasks, where efficient balance control relies on unrestricted movement and rapid postural adjustments. Results from this work were intended to inform the development of safer, more efficient exoskeletons and training protocols, enhancing user acceptance while reducing ergonomic risks. Accordingly, we focused on quantifying global dynamic balance outcomes associated with ASE use during dynamic tasks.
Methods
Anthropometrics of the participants.
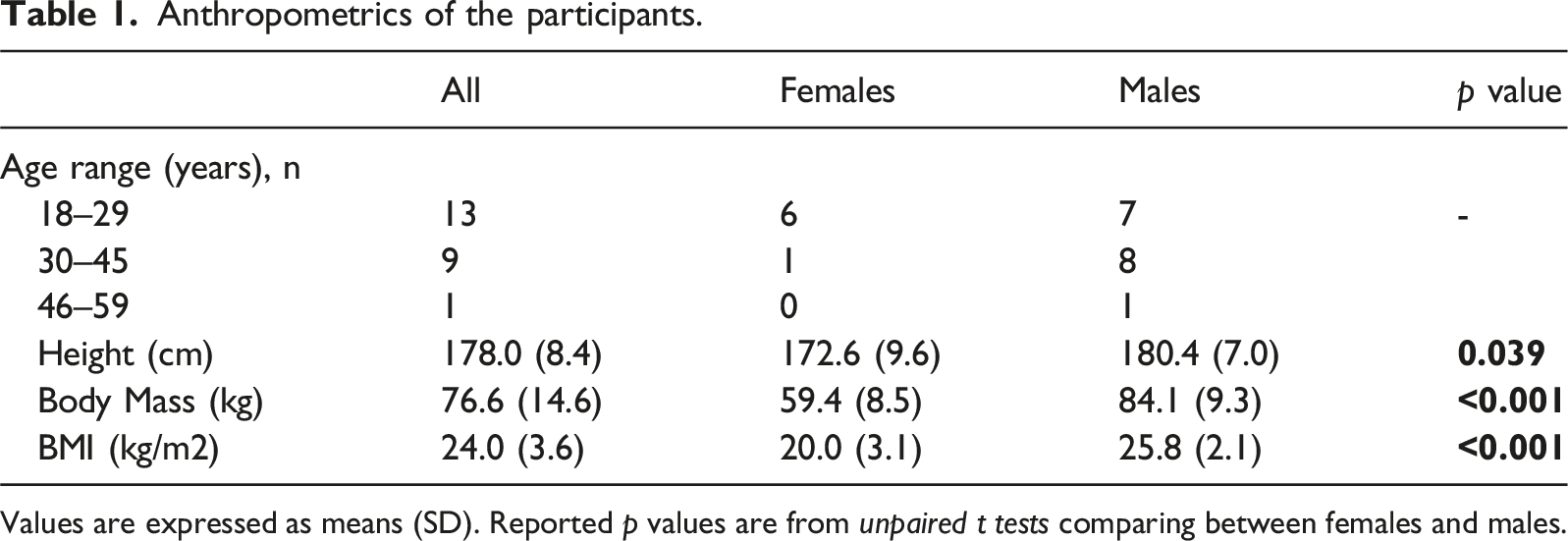
Values are expressed as means (SD). Reported p values are from unpaired t tests comparing between females and males.
Experimental Design
The three ASEs included were: (1) Paexo Shoulder—Test-Unit (16ES100=2-I-S; Ottobock, Duderstadt, Germany); (2) ShoulderX—model S (SuitX, Emeryville, CA USA); and (3) Evo (Ekso Bionics, San Rafael, CA USA). These devices were selected since each has different designs, mass (1.9 kg for Paexo Shoulder, 3.3 kg for ShoulderX, and 4.0 kg for Evo), and support mechanisms. A description of each exoskeleton’s characteristics is provided in the appendix (Table A1). We used a repeated-measures experimental design, wherein each participant performed the same dynamic balance task under six different exoskeleton conditions: no-ASE, Evo on, Evo off, SuitX on, SuitX off, and Ottobock on (Ottobock does not turn off).
Experimental Design and Procedures
Participants completed a single-leg drop-landing maneuver, a procedure used in several earlier studies to assess dynamic postural stability, evaluate injury risk, and investigate the effects of additional external loads (Fransz et al., 2018; Nagai et al., 2024; Wikstrom et al., 2005; Williams et al., 2016). Although this task does not replicate a specific construction activity, it captures key biomechanical and sensorimotor demands relevant to construction work, including rapid load acceptance, single-limb support, and stabilization during transitions between levels. Such demands commonly occur during activities such as descending stairs or ladders and negotiating uneven surfaces where balance recovery and dynamic stability are critical. Therefore, the single-leg drop-landing task was considered to provide a controlled and sensitive framework for examining how exoskeleton use may influence dynamic stability during transitional movements representative of real-world occupational scenarios. The task was completed in all six experimental conditions (no-ASE, Ottobock, SuitX-On, SuitX-Off, Ekso-On, and Ekso-Off), the order of which was fully randomized across participants to reduce confounding effects of learning. Participants were instructed to drop down from an 18 cm-high platform in a forward hopping motion, onto a single leg (see Figure 1), landing on a force platform (AMTI BMS 6001200, Watertown, MA, USA) that recorded ground reaction forces (GRFs) and moments at a sampling rate of 1200 Hz. Example of the experimental setup and single-leg drop-landing task. Participants stepped down from the platform and landed on one leg at a self-selected, comfortable distance. The blue cross-mark indicates the center of the force plate and were provided as visual references
Each trial consisted of a single drop-landing maneuver, during which the participant jumped down from the platform and attempted to stabilize on one leg by landing at a self-selected, comfortable horizontal distance. The only requirement was a brief flight phase, during which neither foot was in contact with any surface, in order to ensure a true drop-landing maneuver. Both legs were tested, and trials were repeated as needed until three successful trials were completed for each leg. A successful trial was defined as one in which the participant did not need to use their hands or the other foot to achieve balance. Trials were repeated until three successful trials were recorded. LabView software was triggered to collect force platform data upon contact (i.e., vertical GRF >10 N) with the plate.
From force platform data, we derived the time series of the center-of-pressure (COP) coordinates during each trial. COP time series were then processed to assess dynamic balance using postural sway parameters and the Dynamic Postural Stability Index (DPSI; Wikstrom et al., 2005). These metrics offer objective information on the ability to maintain postural control across dynamic scenarios and have been used previously to investigate dynamic balance during similar tasks (LaGoy et al., 2020; Nagai et al., 2024; Pau et al., 2015, 2019; Sell et al., 2013).
The COP time series were first filtered using a 4th-order, low-pass, Butterworth filter with a 10 Hz cutoff frequency, applied bi-directionally (Pau et al., 2019). Based on previous research (Pau et al., 2015, 2019), the COP data analyzed were limited to a 3-second window starting from the initial contact on the platform. Only trials in which participants successfully maintained balance throughout the entire 3-second period were considered valid for analysis. Trials in which the participant stepped, stumbled, or was visibly unable to stabilize were classified as failed and were excluded from further analysis. From each successful trial, we obtained the following post-landing sway measures (Era & Heikkinen, 1985; Pau et al., 2019): Sway area (Area, 95% confidence ellipse, mm2) COP path length (Path, the overall distance travelled by the COP during the trial, mm) COP maximum displacements (the difference between the maximum and minimum values of the selected coordinate recorded during the trial, mm) in the antero-posterior (DispAP) and medio-lateral (DispML) directions Mean COP velocity in the antero-posterior (VAP) and medio-lateral (VML) directions (mm/s)
Although these parameters are typically used in static conditions, previous studies have demonstrated their applicability in dynamic contexts (Huurnink et al., 2019; Pau et al., 2019).
To calculate the DPSI, GRF data from the same 3-second windows (Pau et al., 2019) were used according to the following formula (Wikstrom et al., 2005):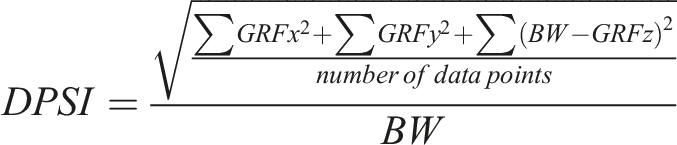
Data Analysis
Outcome measures were selected a priori to represent distinct biomechanical constructs (postural sway and dynamic stability) rather than multiple interchangeable endpoints. Accordingly, separate repeated-measures analyses of variance (RM-ANOVAs) were used to assess the effects of the six exoskeleton conditions and biological sex (female, male) on the outcome measures (postural sway measures, DPSI, and the directional stability indexes). The level of statistical significance was set at p < 0.05, and partial eta-squared (η p 2) was reported as a measure of effect size. When significant main effects were found, post hoc pairwise comparisons were conducted with Bonferroni corrections to adjust for multiple testing.
The preliminary RM-ANOVA results indicated that the significant differences were primarily between the no-ASE condition and the ASE conditions as a group, rather than among the specific ASE models or between On and Off states. To explore individual variability, we thus computed a mean response across all ASE conditions (including both On and Off states) to create a single composite ASE condition. The difference between this mean and the no-ASE condition was then calculated for each participant. Then, we examined the correlations between these delta values and anthropometric measures (e.g., height, body mass, and BMI) to assess whether body characteristics influenced the magnitude of postural change induced by wearing an ASE. All analyses were performed using IBM SPSS Statistics v.26 (IBM Corp., Armonk, NY, USA).
Results
Based on the exclusion criteria, a total of 41 trials (5.0% of all valid trials, out of 828) were excluded from the analysis because participants were unable to successfully complete the step-down task without using the hands or the contralateral foot to regain balance. When expressed as a percentage of trials within each condition, excluded trials accounted for 3.6% in the no-ASE condition (5/138), 4.3% in Evo-On (6/138), 3.6% in Evo-Off (5/138), 5.1% in SuitX-On (7/138), 5.8% in SuitX-Off (8/138), and 7.2% in the Ottobock condition (10/138).
With respect to trial order, excluded trials occurred during the first trial (n = 18; 43.9%), second trial (n = 15; 36.6%), and third trial (n = 8; 19.5%). In addition, 22 of the 41 excluded trials (53.7%) occurred on the dominant leg, while the remaining failures were distributed across the non-dominant leg. Failure rates ranged from 3.6% to 7.2% across conditions. An exploratory chi-square test of independence showed no significant difference in the proportion of failed trials across exoskeleton conditions (χ2(5) = 2.61, p = 0.76, Cramer’s V = 0.06).
RM-ANOVA results for postural sway parameters, DPSI, and directional stability indexes
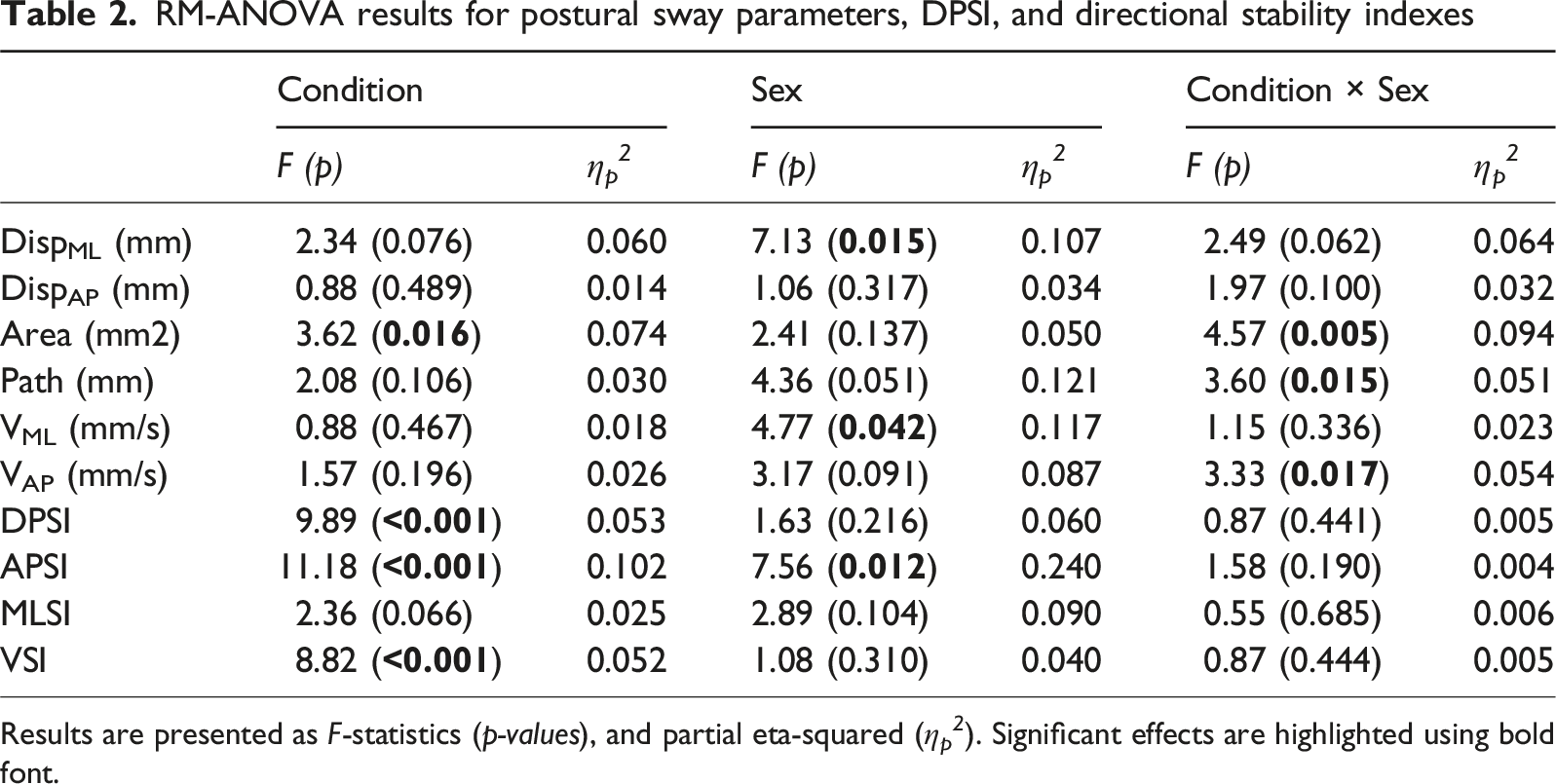
Results are presented as F-statistics (p-values), and partial eta-squared (η p 2 ). Significant effects are highlighted using bold font.
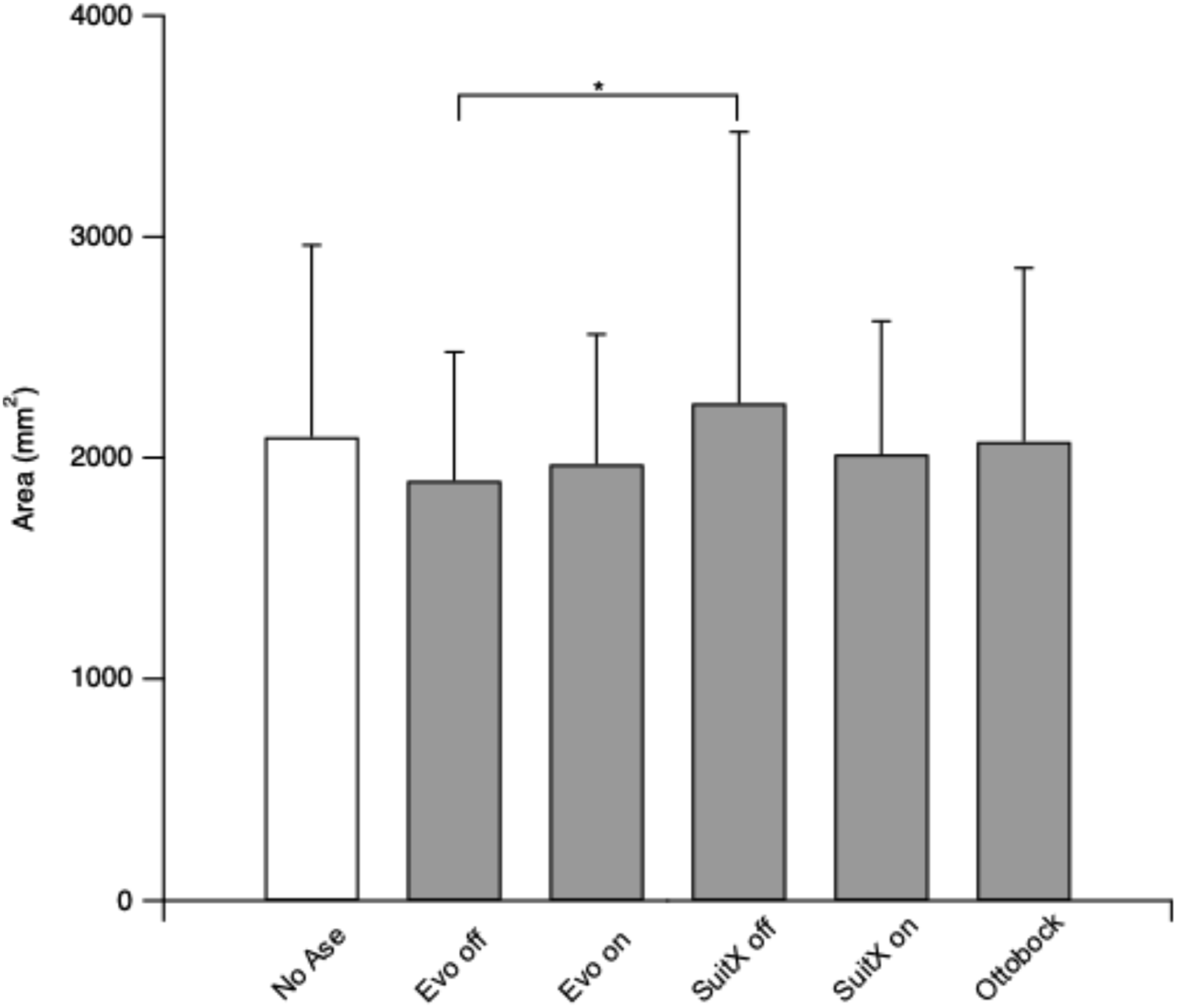
Postural sway measures across exoskeleton conditions (values are means + 1 standard deviation). *indicates a statistically significant difference after Bonferroni correction for multiple comparisons (p < 0.05)
Pearson correlation coefficients describing the relationships between ASE-induced changes (Δ = ASE − no-ASE) in sway and DPSI metrics and individual anthropometric characteristics
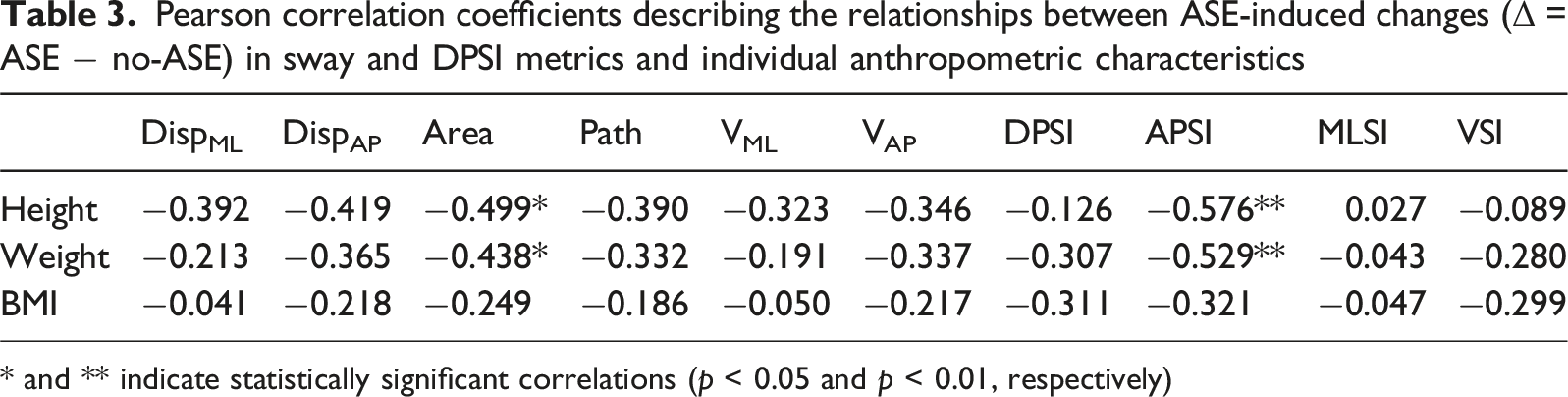
* and ** indicate statistically significant correlations (p < 0.05 and p < 0.01, respectively)
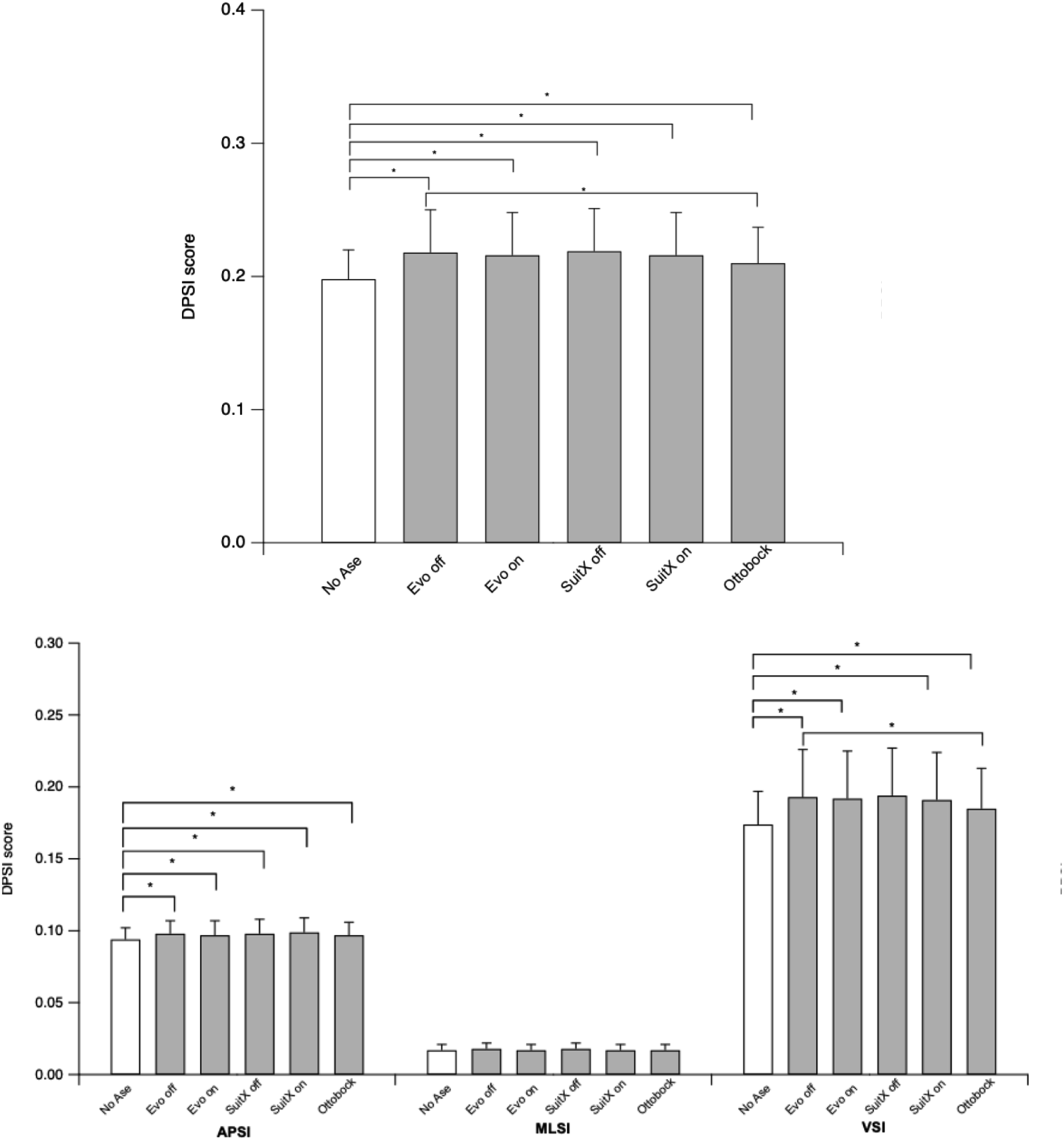
Mean values (+SD) of DPSI (top) and the directional stability indexes (bottom) across conditions. * indicates statistically significant differences after Bonferroni correction for multiple comparisons
Correlation analyses (Table 3) showed that height and body mass, but not BMI, had significant negative correlations with Area (r = −0.499, p = 0.021 and r = −0.438, p = 0.047, respectively). These same anthropometric parameters had negative correlations with APSI (r = −0.576, p = 0.004 and r = −0.529, p = 0.009, respectively).
Discussion
We examined the effects of ASE use on dynamic balance during a drop-landing maneuver, focusing on sway and DPSI parameters. These measures reflect overall balance performance but do not capture the specific movement strategies or neuromuscular control patterns participants used to maintain stability. Our findings suggest that interpretations of ASE-related effects on postural stability depend on the adopted outcome metric. Sway, which reflects COP oscillations and muscular corrections typically associated with balance regulation (Boyas et al., 2013; Pau et al., 2016), was not significantly affected using an ASE (either in the on or off state). In contrast, using an ASE consistently increased DPSI and its directional components. This discrepancy indicates that different dynamic balance metrics may capture distinct aspects of postural behavior. In particular, an increased DPSI may reflect altered landing dynamics or elevated ground reaction forces due to added ASE mass, rather than impaired stability per se. Therefore, we suggest that combining sway and DPSI measures provides a more comprehensive and nuanced understanding of ASE-related changes in postural control. This distinction highlights the need to consider multiple, complementary balance metrics when evaluating ASE use in relation to fall risk and biomechanical demands.
The significant effects of ASEs on DPSI, APSI, and VSI (Figure 3) may indicate that participants chose a different landing strategy when wearing an exoskeleton. In particular, the presence of a rigid external device could have led to a more cautious or stiffened landing, likely aimed at minimizing discomfort or mechanical interference. Such changes in motor behavior may result in increased ground reaction forces and, consequently, in higher values of the dynamic stability indexes (Huurnink et al., 2019; LaGoy et al., 2020). Although the added ASE mass is minimal relative to body mass (ranging from 1.9 to 4.0 kg, depending on the ASE model), in a dynamic task such as stepping down, even a small increase in distally distributed mass may amplify the moment-of-inertia of the body–ASE system, particularly around the ML and AP axes. An increased moment-of-inertia may reduce the ability to rapidly modulate segmental accelerations during landing, thereby amplifying inertial forces and impairing post-impact stabilization. This mechanical effect could contribute to altered GRF patterns and reduced stabilization efficiency, as reflected by higher DPSI, APSI, and VSI values. In this context, both neuromotor adaptations and biomechanical changes associated with center-of-mass displacement and increased moment-of-inertia may contribute to ASE effects on dynamic postural stability.
It is important to note that, while DPSI provides useful information about the mechanical demands during landing—such as kinetic energy absorption and peak impact forces—it may not accurately reflect postural stability or risk of balance loss (Huurnink et al., 2019). In fact, as suggested by Huurnink et al. (2019), DPSI might be more strongly related to impact dynamics, whereas COP-derived sway parameters better capture the ability to stabilize posture and maintain the COP within the base of support. By contrast, DPSI reflects the magnitude and variability of the forces the body must cope with, thus offering insight into task difficulty rather than postural stability per se. Therefore, while both metrics yield complementary information, sway may be more indicative of the mechanisms underlying postural stabilization after landing (Huurnink et al., 2019).
While previous research used sway parameters to evaluate the influences of ASEs on static balance (Kim et al., 2018), highlighting alterations in postural control as changes in the velocity and amplitude of COP displacements in AP direction, we used the same parameters here to investigate balance recovery. This difference in tasks is important when interpreting results, since static balance tasks involve maintaining a relatively stationary position, whereas dynamic balance tasks require maintaining equilibrium during movement, thereby engaging different aspects of postural control. ASE-induced postural control adaptations may vary between static and dynamic conditions, thereby reinforcing the concept of task specificity in how ASEs influence balance.
In terms of dynamic tasks not related to balance recovery, Maurice et al. (2020) reported an increase in COP velocity during overhead work with ASEs, suggesting that the integration of an exoskeleton into work practices may require users to develop new postural strategies to manage the additional mass. In a balance-recovery task context, Dooley et al. (2024) found that the use of ASEs, while not significantly increasing the likelihood of failed recovery, did affect kinematic variables (e.g., hip height and trunk flexion angle), potentially indicating a greater challenge to balance maintenance. These two studies support our interpretation that exoskeletons may not directly impair balance recovery but rather increase mechanical demands and elicit compensatory adaptations in the wearer’s posture and movement strategy.
Our DPSI data revealed that the wearer’s balance was altered by biomechanical changes induced by the ASEs, particularly in the AP and vertical directions. Such results suggest that although sway remained stable, DPSI was sensitive to inertial components of the GRF, likely reflecting the dynamic demands of the step-down maneuver. The observed increase in overall DPSI is consistent with findings from LaGoy et al. (2020), who reported that dynamic postural stability deteriorated during backpack-carrying tasks. Interestingly, while the APSI decreased in their study—interpreted as a compensatory strategy involving more constrained movement to manage the added mass—we observed a significant increase in APSI with ASE use. This discrepancy may be explained by the fact that, unlike a backpack, the exoskeleton not only adds distal mass but also imposes mechanical constraints on upper-limb and torso movement. These constraints may limit the wearer’s ability to adopt compensatory landing strategies, thereby exacerbating the postural challenge in the sagittal plane. Overall, these observations suggest that extra mass—particularly when associated with biomechanical constraints, as in the case of ASEs—poses important challenges to balance recovery. Further examination of the MLSI in our study revealed no differences between the ASE and no-ASE conditions, suggesting that lateral stability is predominantly preserved during tasks involving sagittal-plane motion.
We did not find significant differences in most sway parameters between the six tested conditions (Figure 2), but it is important to note the presence of inter-individual variability. Figure 4 emphasizes this point by showing sway ellipses for all six conditions among two exemplar participants. These visual representations underscore that, while some participants exhibited the smallest Area during the no-ASE condition, this pattern was not consistently observed across the whole sample. In several cases, the ASE condition yielded an Area that was either comparable to or smaller than the no-ASE condition, intimating a more variable effect of the exoskeleton on postural stability than initially presumed. Example of sway ellipses (95% confidence) for two participants in all six experimental conditions. On the left, the no-ASE condition had the smallest Area with respect to the other conditions; on the right, all ellipses were mainly similar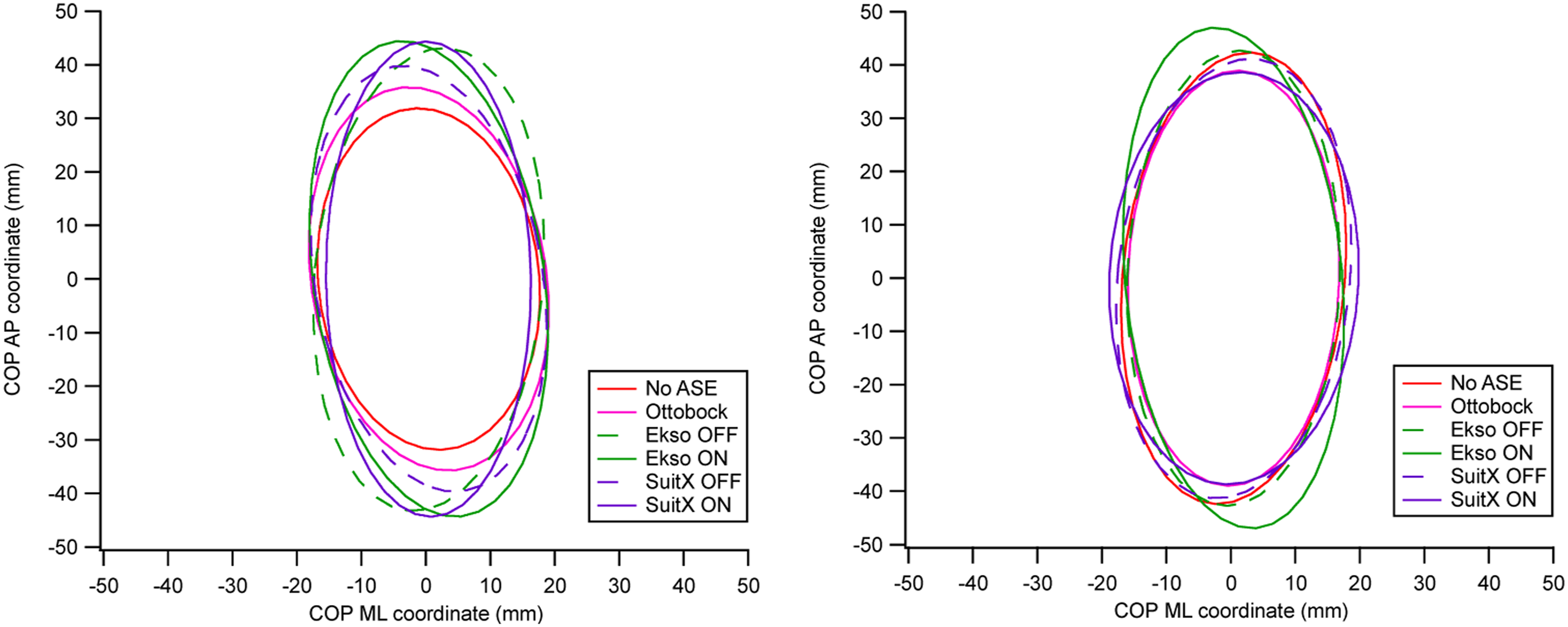
This inter-individual variability raises the possibility that, in addition to individual adaptation capabilities, anthropometric characteristics (e.g., body mass, height, or BMI) could modulate the postural response to ASEs. Our additional analyses revealed a significant negative correlation between variations in Area and APSI with individual height and body mass, suggesting that smaller body dimensions impair dynamic stability when wearing an ASE. Conversely, BMI did not correlate with changes in stability when wearing an ASE in the particular context of this study. Our findings indicate that shorter and lighter individuals exhibit greater increases in Area and APSI when comparing the ASE vs. the no-ASE conditions. This difference between conditions may be due to alterations in movement mechanics or balance strategies necessitated by the smaller physical dimensions when interfaced with an assistive device like an exoskeleton that has fixed dimensions and mass.
Given the unbalanced sex distribution in the sample, analyses involving sex were intended to be exploratory and descriptive in nature. Within this framework, we found significant Condition × Sex interaction effects on Area, Path, and VAP (Table 2). In addition, significant main effects of sex were found for DispML, VML, and the APSI, with females showing higher values across all ASE conditions. These exploratory findings may suggest that the postural demands imposed by ASE use may be modulated by sex, potentially due to differences in anthropometrics—ASEs accounting for a higher percentage of body mass in females vs. males—neuromuscular control, or the relative impact of the added exoskeleton mass. The greater DispML in females may reflect alternative balance control strategies after landing, whereas the higher APSI values suggest greater difficulty in managing sagittal-plane dynamics. Such sex-related differences align with prior evidence indicating that female users may exhibit distinct biomechanical responses, muscle activation patterns, and discomfort levels when using exoskeletons (Kim & Nussbaum, 2019; Leibman & Choi, 2023; Park et al., 2022).
Some limitations of this study should be acknowledged. First, participants were volunteers with no specific expertise in physically demanding sectors such as construction, nor previous experience with exoskeletons, which may limit the generalizability of the findings. Second, EMG data were not collected, preventing a direct assessment of stabilizing muscle activity in the lower limb following landing. Third, kinematic data were not collected, thereby limiting our ability to comprehensively characterize joint movements and the biomechanical strategies used during the step-down maneuver. Accordingly, a detailed characterization of individual balance strategies would require integrating kinematic and/or EMG measurements, which were beyond the scope of the present study. In addition, the unbalanced sex distribution in the sample limits the ability to draw firm conclusions regarding sex-related effects, and such findings should therefore be interpreted with caution. Finally, while leg dominance was assessed, the limited number of non–right-dominant participants may have constrained its interpretability and contributed to inter-individual variability in postural responses.
To summarize, we investigated the effects of ASEs on dynamic postural stability and sway during a controlled step-down maneuver followed by a single-leg stance. Although wearing an ASE altered DPSI values, likely due to changes in landing GRFs that influence how DPSI is calculated, it did not inherently destabilize the user during the maneuver. These findings suggest that ASEs can likely be safely used during transitional movements involving changes in elevation, such as stepping down. Future studies are needed, though, to assess ASE effects in more complex locomotor tasks, such as walking on uneven or irregular terrain. The observed anthropometric and sex-related differences suggest that tailoring devices to individual physical characteristics and probably sex-specific needs could improve postural stability and overall usability. Introducing exoskeletons into the workplace requires careful evaluation of their impact on movement and balance.
Key Points
We investigated how arm support exoskeletons (ASEs) influence balance during a dynamic step-down task. ASEs did not impair postural control but altered stabilization strategies during landing. Shorter and lighter individuals showed greater changes in stability when using ASEs. Findings support the safe use of ASEs in transitional tasks, with attention to individual variability.
Supplemental Material
Supplemental Material - Wearing an Arm Support Exoskeleton Does Not Affect Balance but May Decrease Dynamic Stability During a Step-Down Maneuver
Supplemental Material for Wearing an Arm Support Exoskeleton Does Not Affect Balance but May Decrease Dynamic Stability During a Step-Down Maneuver by Federico Arippa, Alan Barr, Brandon Phillips, Sunwook Kim, Maury A. Nussbaum, Carisa Harris-Adamson in Human Factors.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by CPWR, The Center for Construction Research and Training [grant numbers U60–OH009762-11].
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
Author Biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.