
Abstract
Objective
An up-to-date and thorough literature review is needed to identify factors that influence driver situation awareness (SA) during control transitions in conditionally automated vehicles (AV). This review also aims to ascertain SA components required for takeovers, aiding in the design and evaluation of human–vehicle interfaces (HVIs) and the selection of SA assessment methodologies.
Background
Conditionally AVs alleviate the need for continuous road monitoring by drivers yet necessitate their reengagement during control transitions. In these instances, driver SA is crucial for effective takeover decisions and subsequent actions. A comprehensive review of influential SA factors, SA components, and SA assessment methods will facilitate driving safety in conditionally AVs but is still lacking.
Method
A systematic literature review was conducted. Thirty-four empirical research articles were screened out to meet the criteria for inclusion and exclusion.
Results
A conceptual framework was developed, categorizing 23 influential SA factors into four clusters: task/system, situational, individual, and nondriving-related task factors. The analysis also encompasses an examination of pertinent SA components and corresponding HVI designs for specific takeover events, alongside an overview of SA assessment methods for conditionally AV takeovers.
Conclusion
The development of a conceptual framework outlining influential SA factors, the examination of SA components and their suitable design of presentation, and the review of SA assessment methods collectively contribute to enhancing driving safety in conditionally AVs.
Application
This review serves as a valuable resource, equipping researchers and practitioners with insights to guide their efforts in evaluating and enhancing driver SA during conditionally AV takeovers.
Keywords
Introduction
Responsibilities for Both Automated Driving Systems (ADS) and Drivers at Each SAE Automation Level (SAE International, 2021).
Safety concerns stand as the primary driver behind government regulatory constraints when it comes to deploying conditionally AVs (Canis, 2019). In Level 3 AVs, as defined by SAE J3016 standard, drivers are not required to maintain constant road monitoring while in automated mode, but they must remain prepared to regain control of the vehicle when requested by the system. It necessitates a system capable of anticipating forthcoming situations and making accurate judgments regarding whether it can handle them or if driver intervention is necessary (Endsley, 2019). Until a reliable and robust system becomes available to estimate whether a sufficient time buffer exists for a safe takeover, it can be catastrophic if relying on drivers to manage hazardous situations, particularly following an extended period of inattention (Endsley, 2018; Vogelpohl et al., 2018). Drivers who play a truncated role in supervising AV operation will experience a spike in workload as they strive to attain the necessary situation awareness (SA) for executing takeover maneuvers safely (Franz et al., 2015). Thus, research into driver SA during control transitions after prolonged inattention becomes imperative to ensure the safety of Level 3 AVs (Endsley, 2019).
Situation awareness has become a widely used human factors construct describing a person’s state of “knowing what is going on” (Endsley, 1995b). It is formally defined through a three-level model as “the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future” (Endsley, 1988). Endsley’s (1995b) model delineates operator SA, action selection, and performance as separate stages, forming the foundation for discussing the role of SA in dynamic decision making and identifying the key factors that influence this process. Specifically, an individual’s ability to acquire SA is posited to be influenced by information processing mechanisms, which, in turn, are shaped by inherent abilities, experience, and training. An individual’s preconceptions and goals also play a role in the development of SA. System design factors, such as the provision of requisite information and the format of information delivery, alongside task environment features, such as workload, complexity, and automation, can further impact SA. Furthermore, researchers have put forth their own SA definitions in alignment with their research purposes. For example, Judge et al. (1992) defined SA as “the capability to appropriately assess yourself, your system, and your environment in order to make the right decision at the right time”. Gugerty (2011) described SA as “the updated, meaningful knowledge of an unpredictably-changing, multifaceted situation that operators use to guide choice and action when engaged in real-time multitasking”. In summary, SA fundamentally involves the knowledge of, or the ability to discern, what is happening and what actions are required in a given context.
Driver SA plays a crucial role in ensuring safe control transitions from the automated system to the driver in automated vehicles (Franz et al., 2015; Son & Park, 2017). In the context of conditional driving automation, when the system determines that it is approaching its operational limits and cannot manage an impending situation, it initiates a takeover request (ToR), signaling the driver to intervene and resume control of the vehicle. Upon receiving a ToR, the driver, who may have experienced reduced SA due to extended inattention during automated driving, must redirect attention from nondriving activities to reestablish SA in preparation for a safe takeover (Clark et al., 2017; Forster et al., 2017). In situations where the driver is unable to rebuild adequate SA or fails to assume control within a specified timeframe, the system may initiate a minimal risk maneuver, such as an automatic pullover to a safe location. Therefore, it is essential to understand the factors influencing driver SA in order to devise strategies for facilitating SA restoration during Level 3 AV takeovers. Moreover, gaining insights into the components of SA that drivers should attain during specific takeover events and exploring effective methods for assessing driver SA are of paramount importance to ensure safe Level 3 AV takeovers.
Efforts have been made to review empirical evidence regarding driver SA in Level 3 AVs. De Winter et al. (2014) conducted a review of 32 empirical studies (from 1995 to 2014). They compared driver SA across various automation levels, including manual driving (Level 0), using adaptive cruise control for automated longitudinal control (Level 1), and using a system that automates both longitudinal and lateral control, allowing for extended driver distraction from the road (Level 3). However, the study did not aim to explore the factors influencing driver SA (hereinafter referred to as “influential SA factors”). It also requires updating as numerous studies have been conducted since then. A mini-review study by Son and Park (2017) proposed a classification tree of control transitions in Level 3 AVs, incorporating SA as a dimension. The study considered two SA-related variables: situation variables (including traffic complexity before transition, Human–Machine Interface (HMI) concept, and driver distraction) and driver variables (including age, gender, and driving skill). Nine empirical studies (from 2009 to 2017) were retrieved and categorized based on the framework. However, most of the reviewed studies primarily focused on takeover performance, with only four out of nine studies quantifying driver SA using reaction times. The three other studies used takeover performance to infer SA narratively but did not evaluate SA at all. A newly published systematic review by Capallera et al. (2022) analyzed 37 studies (from 2013 to 2020) and provided an overview of the human-vehicle interfaces (HVIs) designed to maintain or measure driver SA in Level 3–5 AVs. Nevertheless, this study did not involve an extensive review of other factors, such as scene features and driver characteristics, that may influence driver SA. Additionally, the review incorporates studies from various levels of vehicle automation, each of which has different expectations for driver SA and behavior. For instance, maintaining SA in high and full automation is not as critical as in conditional automation. Therefore, a review focusing specifically on literature related to driver SA during Level 3 AV takeovers would provide more specific and valuable insights for design recommendations.
The main objective of this article is to construct a conceptual model that outlines the multifaceted factors influencing driver SA restoration during Level 3 AV takeovers, through a comprehensive review of empirical literature. Additionally, drawing upon empirical evidence, we intend to synthesize the situational information (or referred to as SA components) that requires a driver’s attention to perform takeover tasks safely. The findings will form the basis for discussing their implications on HVI design, which encompass a range of communication modalities between the driver and the vehicle control, including (physical and digital) HMIs, auditory cues, voice control, and gesture control. Furthermore, this review will examine the methods utilized in empirical studies to evaluate driver SA during Level 3 AV takeovers, providing valuable insights into the assessment of driver SA for both research purposes and real-world driving scenarios.
The research questions (hereafter referred to as RQ) to be answered are as follows:
Method
The literature search was conducted using Web of Science, Compendex, IEEE Xplore, and PsycINFO (via ProQuest) databases. Additionally, we utilized the Publish or Perish software to cycle through the pages of Google Scholar search results, a resource known for its extensive coverage and acknowledged use in systematic reviews (De Winter et al., 2014; Gehanno et al., 2013; Harzing, 2011). The search was performed in June 2020 using the keyword “situation awareness” combined with either “autonomous vehicle” or “automated driving,” as well as either “takeover” or “control transfer,” yielding a total of four individual searches within each database or search engine. The custom date range for searching was from 2001 to 2020. Due to the substantial volume of results returned by Google Scholar, we limited the inclusion to the top 500 most pertinent articles for each search, constituting the initial pool of literature. Furthermore, we established a Google Scholar alert with the query “situation awareness, driving” to stay informed about new publications.
Our searches yielded 2248 articles in the initial pool of literature: 2000 records from the Google Scholar search engine and 248 records from four databases. After removing duplicates, 1446 articles remained for the screening process. The first screening round was performed based on the title and abstract. An article was excluded if it met any one of the following criteria: (1) it was not written in English, (2) it was not a scholarly journal, a conference paper/proceeding, or a dissertation/thesis, (3) it was not related to surface transportation, and (4) it did not study automated driving.
The full text of the remaining 484 articles was read for the second screening round. For the purpose of the literature review, we included studies that meet all of the following criteria: (1) belonging in the field of human factors and presenting an experiment, (2) involving normal automated driving, which does not require constant road monitoring, and SA restoration during control transitions from Level 3 AVs to drivers, (3) assessing driver SA during control transitions and identifying SA metrics explicitly, and (4) examining at least one factor that affected driver SA restoration and manipulating the variable(s) in the experiment.
Nineteen articles met the initial inclusion criteria. Additional 15 articles were incorporated into the review through the Google Scholar alert, extending the total number of included studies to 34 by January 2023. It is worth noting that a number of empirical studies assessing driver SA in AVs were not included in this review, based on the exclusion criteria such as the absence of SA evaluation during control transitions in Level 3 AVs (e.g., Endsley, 2017; Ma & Kaber, 2005) and the lack of experimental manipulation of variables influencing driver SA (e.g., Clark et al., 2017; Endsley, 2017). The screening process is outlined in Figure 1 for reference. Flow of literature search and screening.
Results
This section presents the results of our analysis, derived from a review of 34 articles. The research questions serve as the foundation for our examination and synthesis of the literature.
Overview and Conceptual Model of Influential SA Factors (RQ1)
A Summary of Empirical Studies by Influential SA Factors (Experiment Design), Takeover Events, ToR (Lead Time and Modality) and SA Components (Medium), SA Assessment Methods, Simulator Fidelity, NDRT, Sample Size, and Participant Age.
Note. 1. B: between-subjects; W: within-subjects.
2. E: emergency, unexpected takeovers; N: nonemergency, unexpected takeovers; P: planned/scheduled takeovers.
3. A: audio; V: visual; H: haptic.
4. S: strategic SA; T: tactical SA; O: operational SA (referring to Michon’s (1985) model).
5. SimL: low-fidelity simulator, for example, a desktop-based simulator, video clips simulating the driving situation through computer monitors;
SimM: medium-fidelity driving simulator, defined as a nonmoving simulator which provides an over 120-degree horizontal field of view and force feedback on the steering wheel;
SimH: high-fidelity driving simulator, defined as a simulator with a moving base.
6. Detailed explanations of SA assessment methods can be found in the Results section regarding RQ3.
Description of Influential SA Factors and References.
Our conceptual model, based on Endsley’s (1995b) framework of dynamic decision making, visually represents the clustering of influential SA factors. As depicted in Figure 2, the model comprises four categories: task/system factors and individual factors, in alignment with Endsley’s (1995b) model; situational factors, which is linked to State of The Environment in the original model; and NDRT factors, an addition specifically relevant to Level 3 AV driving scenarios. Within the task/system category, factors were subdivided into three groups: HVI Design, ADS, and Takeover Task. In this review, HVI encompasses driver–vehicle communication and interaction across all aspects. The HVI design factors have been separated into two columns: one for the period during automated driving before a ToR and the other for the period during takeovers after a ToR, reflecting distinct interaction patterns between drivers and Level 3 AVs. Additionally, ADS refers to the vehicle’s autonomous capabilities and functions, and Takeover Task entails the decisions and actions required from the driver when assuming control of the vehicle during specific circumstances. The individual factors category comprises Driver Characteristics/Traits/Abilities that relate to the qualities, attributes, or abilities of individuals, and System Usage that pertains to the extent to which an individual is familiar with and skilled in using an ADS. The situational factors encompass aspects related to the driving environment and the unique circumstances that arise during takeover situations. Lastly, NDRT factors involve the attributes of the NDRT itself and the way in which drivers engage in an NDRT. One thing to be noted is that Figure 2 presents an overview of influential SA factors that have undergone empirical scrutiny, as well as factors (italicized) that remain unexamined. These unexplored factors may have originated from Endsley’s (1995b) model or other literature sources. The remainder of the RQ1 section provides a summary of how the factors influence driver SA within the conceptual model framework. A conceptual model of influential SA factors for Level 3 AV takeovers. Note. The italic items originate from Endsley’s (1995b) model or other literature sources and have not been examined.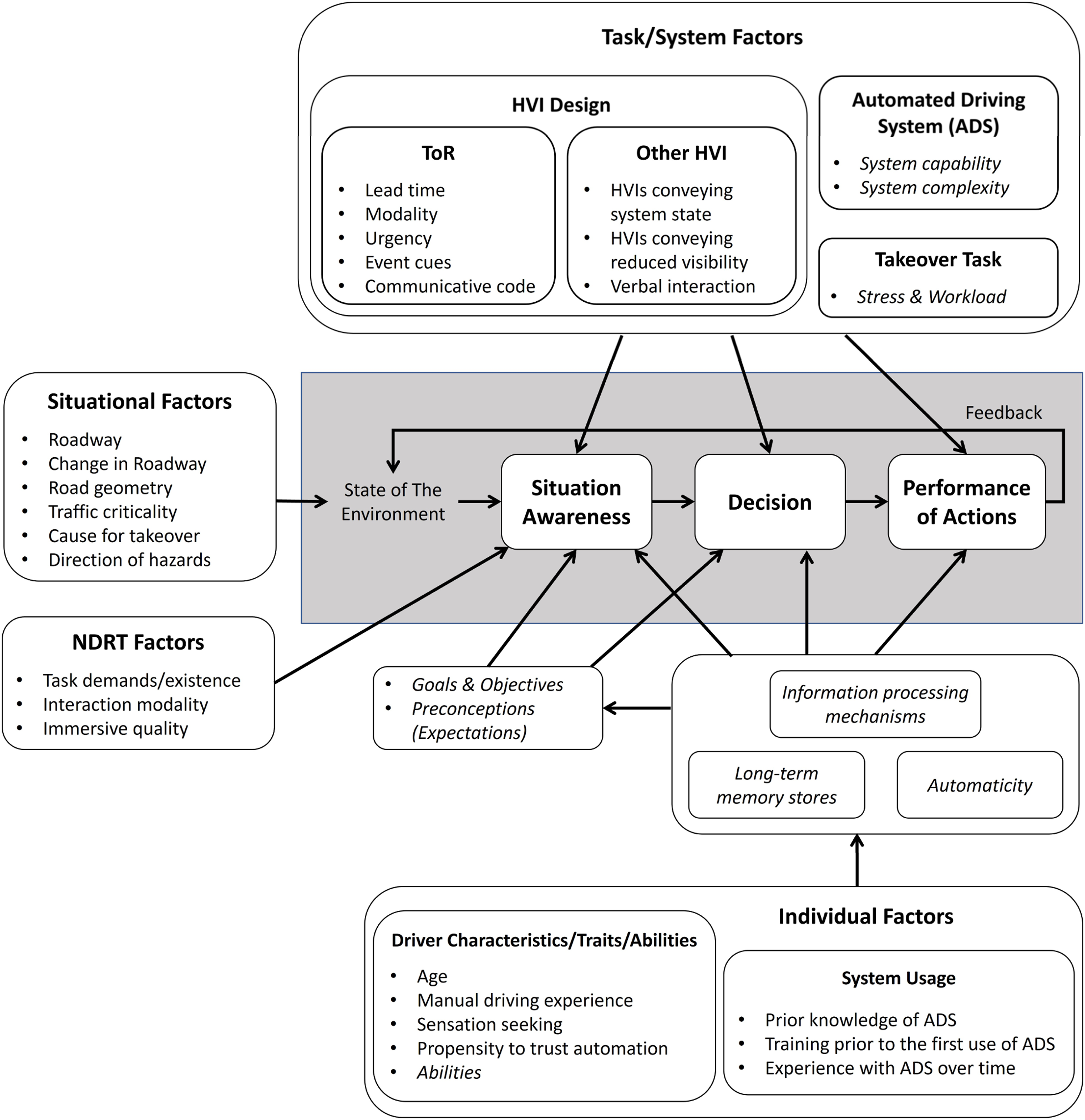
Task/System Factors
ToR Lead Time
We identified six articles that investigated the effects of ToR lead time on SA during Level 3 AV takeovers. All the reviewed studies, regardless of the time criticality of takeover tasks, concluded that the ToR lead time was important for drivers building SA for takeover. The longer ToR lead time was associated with better SA, which, as a result, increased the success rate of takeover (Van den Beukel & Van der Voort, 2013), enhanced drivers’ ability to anticipate latent hazards (Samuel et al., 2016; Vlakveld et al., 2018; Wright et al., 2016), and improved the stability of speed control after takeover (Pampel et al., 2019). The positive effect of a longer ToR lead time on driver SA was found to level off at 16–30 s for answering SA queries (Tan & Zhang, 2022). Nevertheless, Van den Beukel and Van der Voort (2013) found that SAGAT scores did not correlate with the success rate of takeover, and it surprisingly showed a negative correlation with ToR lead time, despite the positive correlations of SART scores with ToR lead time and the success rate of takeover. A possible reason given by authors was that, in the longer ToR lead time conditions with more dynamic traffic, the SAGAT queries on elements (such as type of vehicles at neighboring lanes) that changed rapidly over time might confuse participants and cause ambiguity in giving the correct responses. Another explanation was that an overall SAGAT score was used instead of analyzing three levels of SA according to Endsley’s methodology, which may result in lower measure sensitivity.
ToR Modality
Studies found the benefits of multimodality ToRs that using audio-visual ToRs led to better SA than audio-only (tone + icon vs. tone alone on HUD; Cortens et al., 2019) and visual-only (icon + speech/earcons vs. icon alone; Nadri et al., 2021) counterparts. Nevertheless, no significant improvement was found in SA by providing LED strips and ambient vibrations in addition to a repetition-based system prompting the driver to repeat driving information (Politis et al., 2018).
ToR Urgency
A study by Sadeghian Borojeni et al. (2018) revealed a significant effect of cue urgency on drivers’ reaction time, and the effect was mediated by road curvature. Compared with low-urgency ToRs (low-frequency tones, yellow flashes, long interpulse interval), issuing ToRs with high-urgency features (high-frequency tones, red flashes, short interpulse interval) resulted in faster reaction on straight road segments but slower reaction on curved roads. The challenging situation involving curves and high-urgency ToRs could be the reason that made drivers act slower to avoid mistakes. Nevertheless, low-urgent ToR cues led to less deviation from the center of lane after takeover regardless of road curvature, indicating drivers’ better awareness of road trajectories.
Communicative Code of ToR
No significant difference in SA was found between ToR conditions using speech (“Please take control of the vehicle”) and earcons (Nadri et al., 2021). A study by Park et al. (2020) manipulated five ToR designs, namely, four countdown ToR designs (text-speech vs. text-beep vs. icon-speech vs. icon-beep; no takeover event cues) and a conventional ToR design with no countdown. Results also did not reveal any significant difference in driver SA between either two of the five conditions.
ToR Containing Event Cues
A ToR containing event cues may provide drivers with instructive information such as risky features for guiding drivers’ attention, required evasive maneuvers after takeover, and the urgency of a takeover event. By contrast, a ToR that does not convey any messages could be tones, a simple steering wheel icon, or a command “Take over” in speech or text, which do not contain any information other than the request.
We identified nine articles that manipulated the design of takeover event cues conveyed by either auditory or visual ToRs and investigated how they affected SA. A trend in the reviewed studies was that, compared with an abstract and generic ToR, communicating event cues (particularly upcoming hazard locations) improved the subjective SA (Malik, 2020), guided drivers’ attention to check the windshield, mirrors, and interfaces (Large et al., 2019; Rezvani et al., 2016; White et al., 2019), detected more latent hazards (Van veen et al., 2017; Wright et al., 2017), resulted in shorter reaction times for terminating NDRT and grabbing the steering wheel (Forster et al., 2017), and reduced the acceleration and maximum braking intensity after takeover for smoothing out the control (Langlois & Soualmi, 2016). However, Meteiter et al. (2020) reported that drivers’ subjective SA (and more specifically, SART Understanding ratings) was significantly lower when they used a mobile application using road sign icons to present the context-related information for the scenario with a deer crossing the road. Using such a mobile application also did not help drivers identify the cause for ToR in scenarios with no visibility behind the slope or missing lane markings.
HVIs Conveying System State
The reviewed studies have mixed findings on the effects of presenting the ADS’s state on driver SA. The benefits were found such as better SAGAT responses (Kunze et al., 2019), increased number of glances and longer eyes-on-road time (Yang et al., 2017, 2018), faster takeover reactions and fewer collisions (Olaverri-Monreal et al., 2018), and more mirror checks before lane change and fewer hard brakes after takeover (Yang et al., 2018). However, some studies showed that using HVIs that present ADS’s state did not enhance subjective SA (Large et al., 2019) or direct drivers’ attention to mirrors (White et al., 2019).
Verbal Interaction
A study by Politis et al. (2018) was focused on the design of dialogue-based systems and tested four designs varying in the verbal communication style: a repetition-based system prompting the driver to repeat information, a response-based system asking the driver to answer questions, a multimodality-based system that added visual and tactile modalities to the repetition-based system, and a countdown-based system with no dialogue information. Results did not find significant difference in the subjective SA between any of the four designs.
Situational Factors
Roadway
Two studies have examined the effect of roadway environment on SA in Level 3 AV takeovers and generated mixed results. Agrawal and colleagues (2017) found that less-complex roadway resulted in more latent hazards detected, which indicated better SA. Specifically, drivers detected the most latent hazards in rural environments and the least latent hazards in commercial environments. Murzello (2022) also found the SAGAT score was significantly higher in the highway than urban scenarios, but no significant difference was found between highway and urban environment in the hazard perception time.
Change in Roadway
To investigate the effect of roadway change on SA, Agrawal and colleagues (2017) designed three types of scenarios: manual change (full control of vehicle with change in roadway), automation change (automated driving with change in roadway before ToR), and automation consistent (automated driving with no change in roadway). Results did not find significant difference in the SAGAT score between any two of the three conditions. Drivers had a similar level of hazard detection performance in the automation consistent condition as in the manual change condition. However, drivers detected ten percent fewer latent hazards in the automation change condition than that in the manual change condition, which indicated that more time is needed for drivers to build SA when a hazard is unexpected in a new roadway environment.
Road Geometry
The geometric design of a roadway was found to impact driver SA restoration by two studies. Murzello (2022) showed that drivers had higher SAGAT scores and shorter hazard perception times (indicating better SA) on the straight roads compared with curved roads. Sadeghian Borojeni et al. (2018) found that curved roads yielded larger lane deviations (indicating worser SA) than that on straight road segments.
Traffic Criticality
A study by Tanshi and Söffker (2019) manipulated the ego vehicle speed and surrounding vehicles to assess the effect of the criticality of traffic situation on driver SA. Results revealed a decline in SA associated with more critical traffic situations.
Cause for Takeover
We identified four articles that manipulated the causes of takeover events. Two studies that compared vehicle and pedestrian hazards yielded mixed findings. Samuel et al. (2016) created four scenarios with a pedestrian hidden by a truck or the equipment in a work zone, and another four scenarios with a vehicle hidden at a rotary intersection or in a parking lane/lot. Results found significantly greater likelihoods of the vehicle latent hazards being detected compared with pedestrian latent hazards, which indicated better SA for averting hazardous vehicles than pedestrians. However, a follow-up study by Wright el al. (2016) that used the same eight scenarios as Samuel et al. (2016) did not observe significant difference between detecting the vehicle and pedestrian latent hazards.
Vogelpohl et al. (2018) investigated the time drivers spent to build SA in the five takeover scenarios: a noncritical scenario that required the driver’s navigation decision, a missing lane markings scenario with a braking lead vehicle, a system failure with a braking lead vehicle, a roadwork scenario with a stopped vehicle, and a rainfall scenario with heavy traffic and a braking lead vehicle. By using gaze behaviors as indicators of SA, Vogelpohl et al. (2018) found that the time to the first gaze to the side mirror was the shortest in the roadwork scenario and the longest in the heavy rainfall scenario. However, drivers had slower reactions to the speedometer in the roadwork scenario than all other takeover scenarios. These five takeover scenarios were also tested by Kuehn et al. (2017), but only a slight effect of the takeover type was found on drivers’ reactions to the mirror and speed display.
Direction of Hazards
A study by Cortens et al. (2019) created takeover scenarios with different origins of hazards. It was found that drivers had better SA of a rogue vehicle (erratic driver) coming from left and right as compared to a construction zone in front.
Individual Factors
Sensation Seeking
Vlakveld et al. (2018) analyzed the effect of sensation seeking on driver SA and found it was not a significant predictor of the number of latent hazards detected.
Propensity to Trust Automation
Drivers’ propensity to trust the vehicle automation before the test drive did not significantly affect drivers’ performance in detecting latent hazards (Vlakveld et al., 2018).
Age and Manual Driving Experience
Three studies have examined the effects of driver age or driving experience on SA for Level 3 AV takeovers. Wright et al. (2016) concluded that middle-aged, experienced drivers were quicker to build SA and detected more latent hazards as compared to younger, inexperienced drivers. However, Muzello (2022) found that younger drivers had significantly higher SAGAT scores than middle-aged drivers. Vlakveld et al. (2018) reported that age and driving experience were not significant predictors of SA according to the correlation analysis between driver characteristics and the number of latent hazards spotted.
Prior Knowledge of ADS
The knowledge that drivers had before experiments was found to be influential on SA for Level 3 AV takeovers (Meteier et al., 2020). Providing drivers with information about system limitations before a test drive enhanced the subjective SA for some takeover scenarios such as a slope with no visibility behind the hill and missing lane markings (Meteier et al., 2020). Drivers also better understood the ToR causes for the missing lane markings scenario when they were given the information.
Training Prior to the First Use of ADS
A study by Shaw et al. (2020) showed that drivers who received behavioral training spent shorter time on NDRT engagement, were more likely to detect latent hazards during takeover, and had more mirror checks prior to and during the lane change maneuver (indicating better SA), compared with their counterparts who read a user manual of ADS. However, the training method did not have significant effects on subjective SA.
Experience With ADS Over Time
A study by Nagy et al. (2020) found that drivers had more accurate responses to SA queries as they moved forward in the experiment. Unlike single-visit studies, Large et al. (2019) and White et al. (2019) utilized a longitudinal approach involving multiple visits to explore drivers’ behavioral adaptations to automated driving over five consecutive days. Drivers received a nonemergency ToR on day four and planned takeovers on other days. Both studies found a day-to-day reduction in the demands-on and supply-of their attentional resources and an increase in their understanding of the situation from day one to day three, which showed the beneficial impact of gaining experience with ADS on driver SA. On day four, there was a sharp increase in the demand placed for their attentional resources and a drop in their understanding of the situation, indicating an adverse effect of the nonemergency takeover on driver SA. The SA ratings on day five returned to the magnitude before the nonemergency takeover, which suggests that the nonemergency takeover did not counteract the effects of drivers’ experience with ADS on SA. Nevertheless, Large et al. (2017) used the same approach to conduct a longitudinal study but did not find any trends in subjective SA across days.
NDRT Factors
Task Demands/Existence
A study by Kuehn et al. (2017) suggested that the stronger positive involvement in NDRT led to drivers’ slightly delayed reaction. Nevertheless, Pampel et al. (2019) did not find any significant difference between permitting and prohibiting NDRT on the visual and driving behavioral indicators of SA.
Interaction Modality
A study by Yang et al. (2020) investigated four types of NDRT and found that watching videos resulted in the lowest road checking period, which was followed by reading news, playing games, and answering questionnaires. The finding suggested that NDRT in the passive interaction mode led to more frequent road-checking behavior, indicating better SA. Gerber et al. (2020) found drivers had more self-interruptions from NDRT (indicating better SA) when using HUD compared with using a mobile device to watch a TV show. However, Meteier et al. (2020) did not find significant difference in SA between performing auditory and visual N-back tasks.
Immersive Quality
Vlakveld et al. (2018) found that the extent to which drivers were engaged in NDRT (quantified by the frequency of looking up from a tablet game during automated driving) was not significantly correlated with their performance of latent hazard detection.
Situational Information and HVI Design for SA Restoration (RQ2)
Classification of SA Components and Specific HVI Designs in Reviewed Literature.
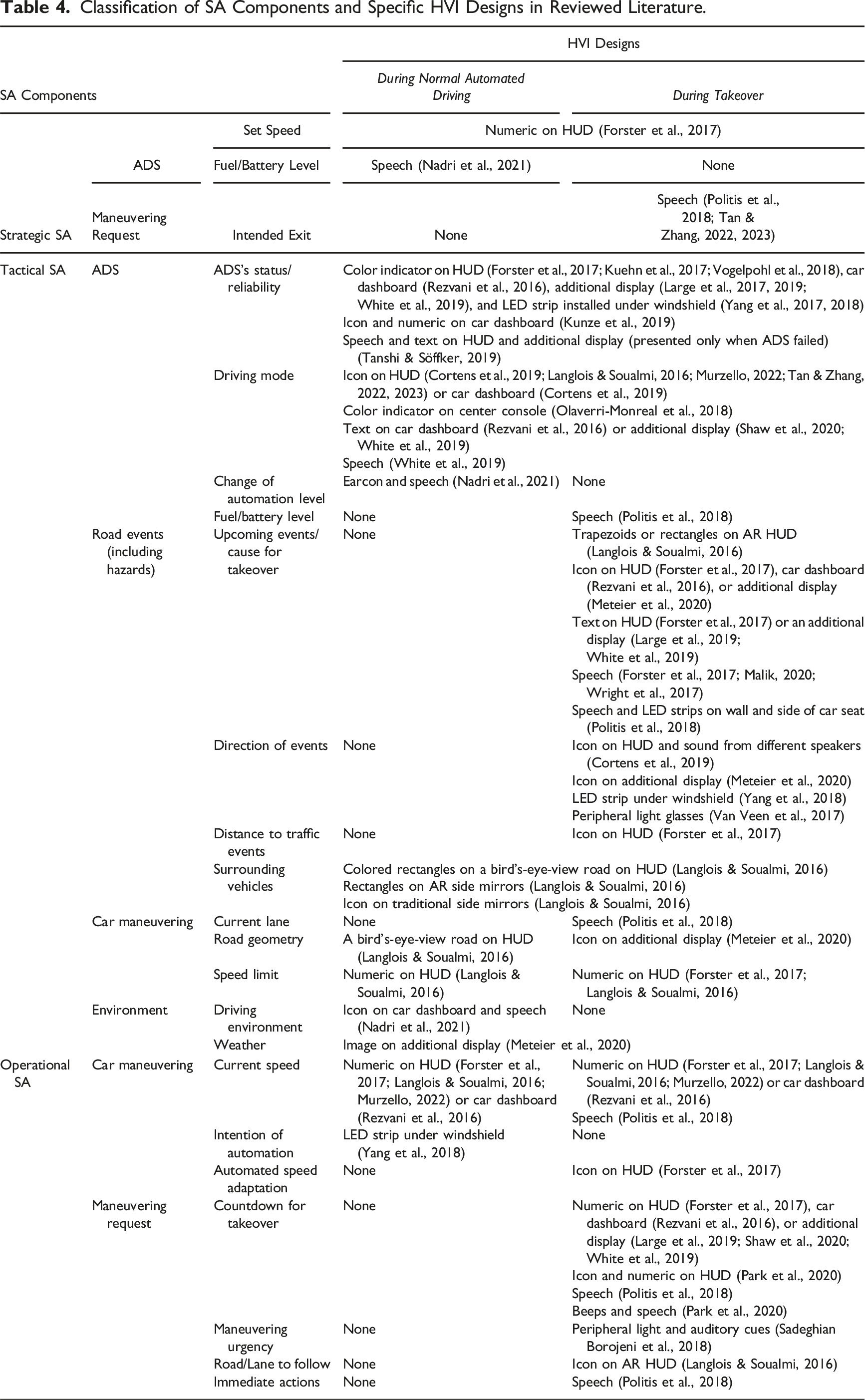
A range of situational information was provided to drivers to enhance tactical and operational SA, a key factor in effectively managing takeovers in Level 3 AVs. In terms of ADS-related SA components, 11 studies involved HVIs that communicated the ADS’s current status or reliability during the drive, using various methods including color coding, numerical displays, textual messages, and auditory cues. The vehicle’s driving mode was consistently presented in eight studies, utilizing color indicators, icons, text, or audio messages. An additional study informed drivers of the vehicle’s fuel or battery level during takeover via speech. Regarding SA components relevant to road events or hazards, 10 studies emphasized the significance of presenting information about upcoming events or the reasons for a takeover. The information was conveyed through world-registered information on AR HUD, icons, LED strips, text, and speech. Four studies provided directional information about hazards using auditory signals, icons, LED strips, or glasses equipped with peripheral lights. The distance to imminent traffic events was depicted through icons in one study. One study utilized a bird’s-eye-view road on HUD, AR-enhanced side mirrors, and traditional mirror icons to represent nearby vehicles throughout driving. Car maneuvering components were addressed, with one study presenting the current lane through spoken instructions, one study depicting road geometry using icons, two studies displaying the speed limit numerically, five studies conveying the car’s speed either in numerical form or through auditory messages, and one study informing the automated speed adaptation via an icon. For maneuvering request for drivers, seven studies introduced a countdown mechanism, using numerical displays, icons, speech, and beeps to alert the takeover urgency. Additionally, one study used auditory messages and peripheral light to communicate the urgency of maneuvering. One study provided immediate action instructions through speech. Drivers were guided on the lane or road to follow post-takeover using icons in one study. Furthermore, strategic SA assumes a crucial role in planned takeovers characterized by potentially long lead times for route planning adjustments or preparations for maneuvers to exit an ODD, thus constituting a form of relatively long-term planning. Two studies underscored the importance of preinforming drivers well in advance about the intended exit, typically achieved through the use of verbal instructions.
Assessment of Driver SA for Takeover (RQ3)
Measuring Methods of Driver SA for Regaining Control of Level 3 AVs.
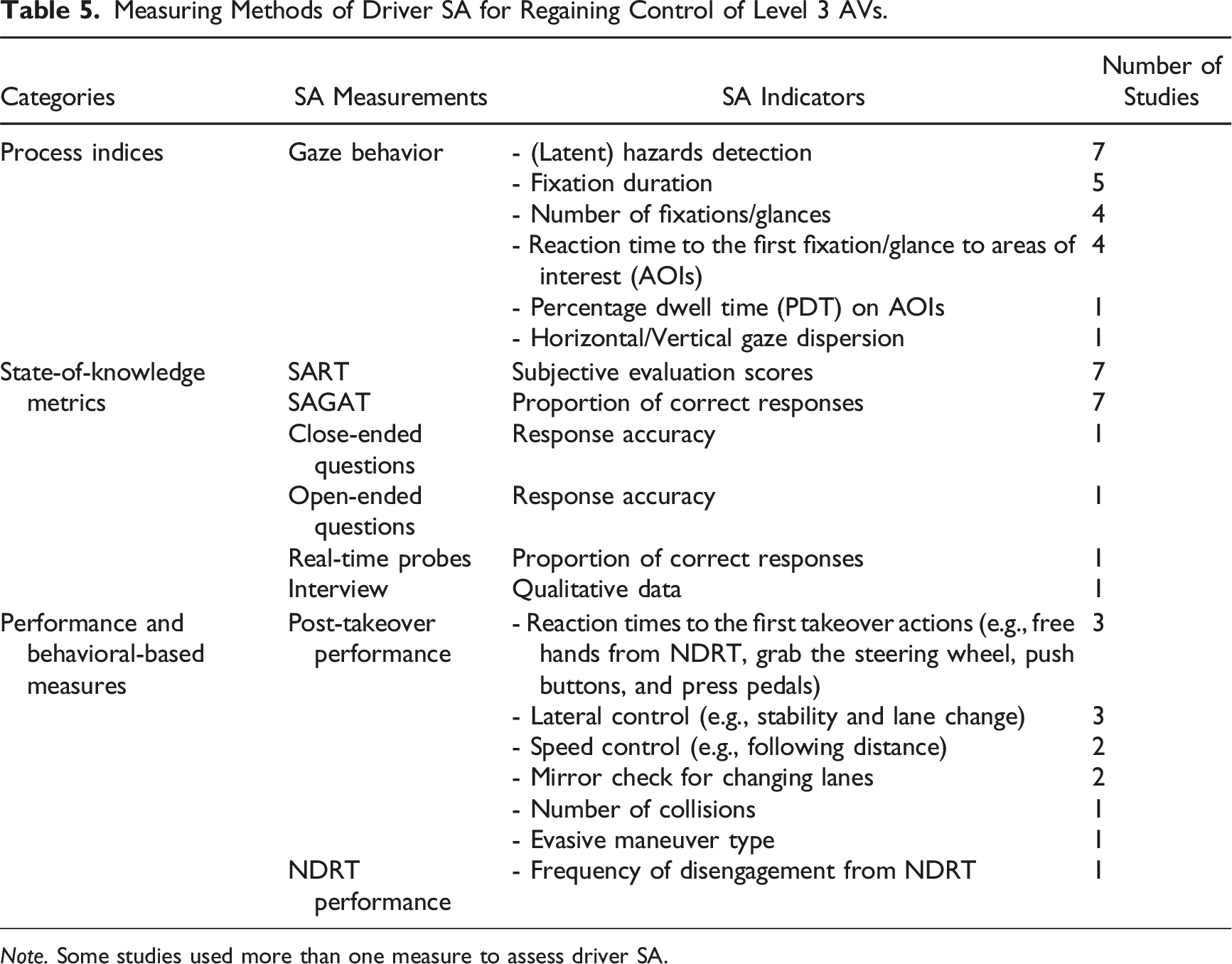
Note. Some studies used more than one measure to assess driver SA.
Process Indices
Process indices, such as psycho-physiological metrics, are commonly used to examine how individuals process information within their surroundings (Wilson, 2000). Gaze behavior, particularly whether a driver glances toward a latent hazard that has yet to materialize, is one of the most-used SA measures in the reviewed studies. Samuel and colleagues (2016) claimed that the anticipation of latent hazards is an effective proxy for indexing all three levels of driver SA: perceiving visual obstructions, understanding those elements, and foreseeing potential hazards rushing out. A commonly used metric for this assessment is the proportion of latent hazards detected. Other gaze behavior measures include reaction times to the first fixation or glance at the road, hazards, mirrors, or speed displays, as well as the number and duration of fixations on these areas, the percentage dwell time spent looking at areas of interest (AOIs), and the dispersion of gaze in both horizontal and vertical directions.
State-of-knowledge Metrics
State-of-knowledge metrics are direct SA assessment methods, involving an objective comparison of drivers’ perceptions of situation with the “ground truth” reality, or a subjective self-assessment of their SA. Data can be gathered through various means, such as interrupting the driving task (e.g., Situation Awareness Global Assessment Technique (SAGAT) by Endsley (1995a)), in real-time during the driving task (e.g., Situation Present Assessment Technique (SPAM) by Durso et al. (1998)), or postcompletion of the driving task (e.g., Situation Awareness Rating Technique (SART) by Taylor (1990)).
SAGAT, a widely used objective method, employs a recall probe technique by posing questions about the driving situation while the simulation is paused, with the display screen off (Endsley, 1987). In most reviewed studies, SA recovery during takeovers was the primary focus, and SA assessment took place after participants had completed takeover tasks to avoid interference. With this in consideration, Kunze et al. (2019) introduced a variation, placing the freezing probe in a replicated scenario containing no takeover tasks prior to the actual takeover event. SAGAT queries as well as open- and close-ended questions covered aspects such as the ego vehicle (e.g., position, driving lane, and safety prediction), other vehicles (e.g., type, location, color, behavior, and future actions), driving environment (e.g., roadway), driving task (e.g., estimated time of arrival and takeover success), and reasons for takeover. Participants’ responses were compared to the actual situation (“ground truth”), with SA estimation based on the response accuracy, typically represented as the proportion of correct answers. Other than using queries, Malik (2020) conducted postexperiment interviews with participants, leveraging qualitative data for SA assessment.
Real-time probes have also been utilized for assessing driver SA in automated driving. In a study by Van Veen et al. (2017), participants experienced automated driving from the passenger seat in a real car on public roads. An experimenter in the back seat questioned participants about road events shortly after the occurrence, with the proportion of correct responses serving as an indicator of driver SA. Additionally, SART is another widely adopted approach for evaluating driver SA. It is a subjective measurement typically conducted postexperiment, where participants are asked to rate their SA across three primary components: Demand (comprising complexity, variability, and instability of the situation), Supply (encompassing the division of attention, arousal, concentration, and spare mental capacity), and Understanding (evaluating both the quantity and quality of information) (Taylor, 1990). The overall SA score is computed using the formula: SA = Understanding – (Demand – Supply).
Performance and Behavioral-based Measures
Performance- and behavior-based measures deduce driver SA from their actions and driving performance outcomes. Post-takeover performance served as an indicator of driver SA, with the assumption that improved driving performance correlates with enhanced SA (Bolstad et al., 2010). For instance, participants who accelerated sooner or maintained lower standard deviations in speed and lateral lane positions were considered to have better SA. Conversely, an increased variance in following distance suggests drivers’ decreased SA. Some studies also gauged SA based on drivers’ reaction times to their first takeover actions, such as freeing hands from NDRT, grabbing the steering wheel, pressing takeover buttons, engaging pedals, with shorter takeover reaction times indicating better SA. In addition to post-takeover performance, the frequency of disengagement from NDRT was used to infer driver SA during Level 3 AV takeovers with the assumption that a reduced rate of secondary task interactions implied improved SA for impending takeover tasks.
Discussion
This section sequentially addresses three research questions based on the analysis of the presented results, concluding with a discussion of the limitations found in the review.
Overview and Conceptual Model of Influential SA Factors
The review of 34 empirical studies has identified 23 factors contributing to the restoration of driver SA during Level 3 AV takeovers. Based on Endsley’s (1995b) framework, we have developed a model encompassing four clusters of influential SA factors, as illustrated in Figure 2. The bulk of research primarily focuses on task/system-related factors, followed by situational factors, individual factors, and NDRT factors. While some factors yield consistent results across studies, such as the effectiveness of communicating upcoming hazard locations, extending ToR lead times, and visually presenting the system state to aid SA restoration, there remain many factors investigated with limited empirical evidence. For instance, limited research has examined the advantage of multimodal ToRs and low-urgency features of ToRs for SA restoration. There is also limited investigation into the impact of takeover causes, hazard direction, roadway, road geometry, traffic criticality, driver training, prior knowledge, long-term experience with ADS, as well as the task demands and interaction modalities of NDRT. Additionally, research findings on driver age and driving experience vary across studies. Further research is needed to substantiate or validate the existing findings.
Our model retains factors (italicized items in Figure 2) stemming from Endsley’s (1995b) framework, which have yet to be studied for their impact on driver SA during takeover. Within the context of Level 3 AVs, the system’s capability to operate autonomously and anticipate situations that exceed its capabilities can potentially constrain HVI designs, thereby influencing driver SA. Complex systems can lead to SA issues if drivers struggle to comprehend them. The stress and workload associated with takeover tasks depend on factors such as time window, information received from the system and the road, and the required maneuvers, all of which can significantly affect SA restoration. The term “abilities” encompasses one’s unique attributes and skills that are honed through knowledge and practice, facilitating the acquisition of necessary information to build SA. Other individual factors, such as expectations and long-term memory stores, pertain to cognitive-level information processing mechanisms. Future research should investigate the potential impact of these factors on driver SA restoration in Level 3 AVs.
Situational Information and HVI Design for SA Restoration
Empirical literature has unveiled a range of SA components and HVI designs that were involved in Level 3 AV takeovers. Nevertheless, few studies have conducted an in-depth analysis of SA components necessary for drivers in various takeover events and the effective methods for conveying them. To bridge this gap, we synthesized our analysis of influential SA factors (RQ1) and SA components (RQ2), thereby leading us to introduce a framework that serves as a set of design guidelines for shaping the content and presentation of situational information during Level 3 AV takeovers. The development of this framework was informed by Pauls et al.’s (2009) three-stage process of designing an emergency communications system.
SA Components
SA Components and Associated Priority Tiers for Takeover Events.
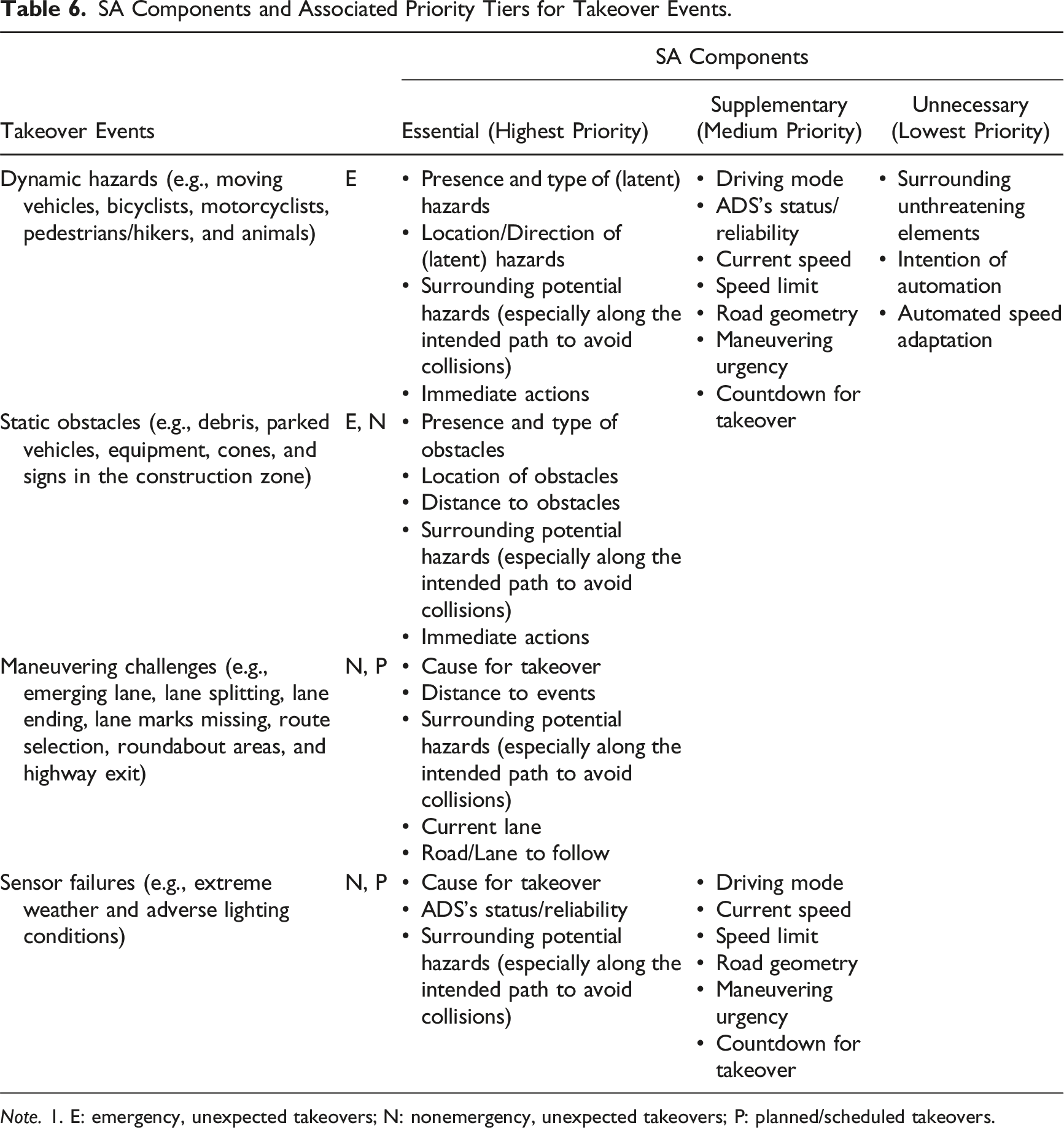
Note. 1. E: emergency, unexpected takeovers; N: nonemergency, unexpected takeovers; P: planned/scheduled takeovers.
The assignment of priorities to SA components is based on their assessed significance in specific type of takeover scenarios. The essential components with the highest priorities are those that directly influence drivers’ comprehension of the reasons for takeover and the subsequent maneuvers required. Such components are vital in ensuring safety during both emergency and nonemergency takeover situations (McCall et al., 2019). In emergency takeovers, characterized by immediate safety-threatening hazards and a constrained time frame for response, it is essential to swiftly and effectively communicate the nature and location of the hazard to the driver (Forster et al., 2017; Langlois & Soualmi, 2016; Large et al., 2019; Malik, 2020; Samuel et al., 2016; Wright et al., 2017). It is particularly crucial in cases involving latent pedestrians that are less detectable than vehicles (Cortens et al., 2019), as well as on complex roadways such as urban environments (Agrawal et al., 2017; Murzello, 2022). In these situations, suggestions for immediate action may be beneficial, particularly for drivers who place high trust in the AV system. However, the impact of the time required for information processing and its potential conflict with the driver’s mental model need further investigation. In contrast, for less urgent takeover scenarios where there is no immediate safety threat, it is crucial to provide drivers with clear explanations for the takeover and pertinent information such as the ADS’s reliability and the distance to relevant events (Kunze et al., 2019; Olaverri-Monreal et al., 2018; Tan & Zhang, 2023, 2024; Yang et al., 2018). Drivers should receive guidance on appropriate lane or road following post-takeover, especially in maneuvering challenges. Additionally, in any scenarios, the identification and notification of nearby objects that could pose risks and potentially evolve into hazards is of significant importance.
The supplementary components with medium priorities refer to those elements that, while not critical for safety, contribute to enhancing driver SA for more effective takeover maneuvers. Components of this category include the basic information pertinent to driving, such as driving mode, the ADS’s status or reliability, the vehicle’s current speed, and speed limit. It is noteworthy that the status and reliability of the ADS ascend to a level of essential during takeovers caused by sensor failures. However, in normal circumstances, these components primarily serve a supplementary role in augmenting SA. Furthermore, providing drivers with the maneuvering urgency and a countdown for takeover can enable them to make informed decisions for determining the most appropriate course of action post-takeover (Sadeghian Borojeni et al., 2018). Additionally, the presentation of road geometry information, particularly in areas with a higher risk of accidents such as curved roads, is helpful for assisting drivers in detecting latent hazards and lane keeping (Murzello, 2022; Sadeghian Borojeni et al., 2018).
Additionally, unnecessary components are characterized by their lack of direct relevance to the execution of takeover tasks. Examples of SA components in this category include the display of surrounding elements, the intention of automation, and the automated speed adaptation. While potentially informative and integral to the overall understanding of situation, these elements do not require immediate attention from the driver during the specific act of taking control of the vehicle.
In the discussion on SA components and their prioritization during various takeover scenarios, a pivotal question arises for regulatory considerations: What types of takeover events should be permissible prior to the commercial deployment of Level 3 ADS? From a safety perspective, it is argued that L3 ADS should be designed to prevent placing drivers in emergent situations that necessitate immediate reaction to intervene. It is essential to acknowledge that even nonemergency, but unexpected situations could result in increased risks if drivers are unable to respond timely within a limited timeframe. This situation underscores the need for the system’s enhanced capabilities to detect unexpected events, potentially through wireless communication with nearby vehicles and infrastructures supported by connected vehicle technologies. From a safety standpoint, it may be prudent for L3 ADS to be confined to nonemergent takeover events that provide drivers with sufficient time to reestablish SA and make decisions based on a comprehensive understanding of the situation.
While the literature has extensively examined emergent takeover scenarios, there is a notable scarcity of research on nonemergent takeover situations. Future studies should aim to explore the time needed for drivers to regain SA in these nonemergent contexts, thereby informing policy decisions with empirical evidence.
Modality and Medium
In the realm of HVI design, the selection of modality and medium for communicating SA components necessitates careful consideration of their priorities. The design must ensure that essential components, which are critical for a successful and safe takeover, are presented in a manner that effectively captures the driver’s attention. An intuitive method, as suggested by Langlois and Soualmi (2016), involves the use of AR HUDs to highlight spatial and dynamic aspects such as the direction and predicted path of hazards, nearby potential hazards, and the road or lane to be followed post-takeover. These components could be presented through engaging graphics and animations on the windshield and mirrors. In the absence of fully mature AR HUD technologies, alternative methods could be employed, such as dynamic LED strips around the windshield, a top-view road map on a traditional HUD or an additional display, and speech warnings from differently located speakers. For conveying nonspatial information that does not pertain to the dynamic aspects of objects, visual presentations, such as screen-fixed AR HUD overlays, traditional HUDs, car dashboards, and additional displays mounted in the center console, could be considered. In addition to visual cues, speech alerts should be provided together, which is an effective tool to focus the driver’s attention and enhance their understanding of the situation (Cortens et al., 2019; Nadri et al., 2021). The use of color coding, blinking, and variations in tone, pitch, speech speed, and signal words can further emphasize the urgency and criticality of information.
Conversely, lower priority components should assume a background role during takeovers, ensuring they do not distract the driver from essential tasks. Supplementary components should be displayed discreetly for the driver’s information, while unnecessary components are deemed optional and should be temporarily concealed or muted during takeovers to minimize distraction. It is crucial to recognize that the priority of specific SA components can shift across different tiers. For instance, in a planned takeover event with a substantial time allowance, the maneuvering urgency might shift from a medium to a high priority. This change necessitates a corresponding adjustment in the presentation of information, highlighting the increasing urgency as the situation evolves (Forster et al., 2017; Tan & Zhang, 2023). This dynamic prioritization underscores the need for adaptive and context-sensitive HVI designs for Level 3 AV takeovers.
Presentation of Information
The design of SA component presentation plays a crucial role in conveying the information to drivers. These components are typically provided alongside ToRs and as needed, retained until the driver has successfully completed the takeover maneuver. The primary objective in presenting these SA components is to support their respective goals in the most effective manner possible. A fundamental principle in the design of SA component presentation is to ensure ease of comprehension, which is imperative to facilitate quick and accurate understanding of the situation and consequently make informed and timely decisions (Meteiter et al., 2020). On this basis, essential components also require attention-grabbing features to minimize the cognitive workload associated with searching for information. Although various designs of presenting SA components have been explored in exiting literature, there is a lack of comprehensive studies comparing the effectiveness of different design approaches in enhancing driver SA during Level 3 AV takeovers. This gap highlights the need for further empirical evidence to inform specific design recommendations for effective communications of situational information.
Assessment of Driver SA for Takeover
Evaluating driver SA during Level 3 AV takeovers is of critical importance as it not only aids in understanding the mechanisms underlying drivers’ takeover decision making and behavior but also informs the system’s evaluation regarding the safety of transferring control to the driver. In instances where essential SA components go unnoticed, the system should be able to take compulsory safety measures, such as autonomously pulling over or safely applying brakes. In the meantime, it is vital to promptly inform the driver about the system’s decision and the reasoning behind such maneuvers. This ensures a shared understanding between the system and the driver, fostering collaborative efforts to maintain safety.
To assess the degree of SA achieved by drivers during a takeover, the first step involves conducting a detailed analysis of the SA requirements necessary for completing the takeover task. This process entails identifying the essential SA components that drivers must acquire for performing takeover tasks and recognizing supplementary SA components that can enhance their takeover performance. Distinguishing between essential and supplementary components aids in understanding how each component contributes to the overall SA. Further, it can be considered to assign weightings to these components in accordance with their relative importance in the context of a takeover task. This structured approach allows for a more nuanced quantification of SA, facilitating a more targeted assessment of which aspects of SA drivers are excelling in or lacking.
The next step involves the meticulous selection of methods that are suitable for SA assessment across previously identified components. This selection process should adhere to three key considerations:
Modality and the Medium for Presenting SA Components
For visual presentations that necessitate focused attention, such as road hazards and ADS’s reliability displayed on the car dashboard, the assessment of SA at the perception level is commonly conducted through the use of eye-tracking tools, using metrics such as fixation presence, fixation count, and fixation duration (Murzello, 2022; Pampel et al., 2019; Rezvani et al., 2016; Whit et al., 2019; Yang et al., 2017, 2018, 2020). However, the “look but not see” phenomenon presents a challenge to the exclusive reliance on eye-tracking metrics for comprehensive SA evaluation. In response to this limitation, supplementary physiological measures, such as electroencephalography (EEG), can be used to offer insights into brain activity and cognitive processes (Zhang et al., 2023). Furthermore, an alternative approach to assessing driver SA involves the detection of latent hazards that have yet materialized. This method is based on the premise that identifying such latent hazards requires driver SA at all three levels (Agrawal et al., 2017; Samuel et al., 2016; Vlakveld et al., 2018; Wright et al., 2016, 2017). Similarly, the act of mirror checking can also be used to indicate a driver’s intention to change lanes after takeover, reflecting the three levels of SA (Shaw et al., 2020; Yang et al., 2018).
In contrast, when considering modalities that require peripheral attention (e.g., LED strips) or those based on auditory or haptic perceptions, the intrusiveness of these presentations complicates the separate measurement of perception from higher levels of SA using physiological measures. To offer a more nuanced understanding of SA, freeze-probe techniques, notably SAGAT, can be considered as a viable solution. This technique allows flexibility in terms of timing, enabling the assessment of SA at any point during a takeover event and at randomly selected takeover events. However, a prevalent limitation in numerous studies is the post-takeover collection of state-of-knowledge data. This approach fails to capture the dynamic process of SA development, focusing instead solely on the outcomes. Moreover, the postevent probing raises concerns regarding the validity of the assessment. When drivers are required to respond to queries or reconstruct a driving scenario shortly after its occurrence, their responses are susceptible to influences from memory recall, decision making processes, and performance. Furthermore, the sensitivity of SA assessment is potentially compromised during probing across the perception, comprehension, and projection levels due to the likelihood of performance-related biases. Therefore, it is recommended to administer freeze probes during randomly selected takeover events in an experiment, rather than after each event, to minimize the potential for a priming effect.
Necessity of Supplementary Measurements
The implementation of performance-based measures in assessing SA necessitates meticulous consideration. This method operates on the premise that observable behaviors are indicative of underlying cognitive processes. However, it is important to recognize that this premise has been challenged in literature. The correlation between observable behavior and the true state of a driver’s SA is not consistently supported across empirical research (Clark et al., 2017; Rizvi et al., 2020; Vlakveld et al., 2018; Weaver & DeLucia, 2020). Moreover, performance-based measures often exhibit a lack of sensitivity in distinguishing variations in driver attention and SA that may arise due to differences in system design, especially when the experimental design encompasses a limited number of trials and scenarios (Endsley, 2021a, 2021b). Given these considerations, it is prudent to avoid an exclusive reliance on performance-based measures for evaluating driver SA during takeovers.
In conjunction with objective measures of SA, SART provides insights from a subjective standpoint. SART is typically administered posttask, requiring drivers to self-assess their SA levels. While this method is recognized for its straightforward implementation and ease of use, it is crucial to consider its inherent limitations. A prevalent critique of self-evaluated SA is the subjectivity and the often observed disconnect between these subjective assessments and objective SA measures (Endsley, 2020). The self-ratings provided by drivers can be unduly influenced by the outcomes of their takeover performance, which may lead to skewed assessments. Furthermore, there is a risk of drivers overestimating their SA due to a lack of awareness of unperceived information, a phenomenon reported in many studies (Bolstad et al., 2010; Endsley, 2021a). Additionally, subjective SA ratings can be influenced by individual personality traits, notably self-confidence. Research indicates a more significant correlation between subjective SA assessments and the individuals’ confidence in their SA, rather than the actual SA levels (Endsley et al., 1998; Hamilton et al., 2017). In light of these findings, it is advisable for future research to prioritize objective measures as the primary indicators of SA. Subjective measures, while valuable, should be utilized primarily to gauge drivers’ confidence in their SA, rather than as definitive assessments of SA itself.
Purpose of SA Assessment
The assessment of driver SA during Level 3 AV takeovers is typically directed by two principal objectives. The first objective entails an examination of how various factors influence SA across diverse contexts and time frames, which is achieved through comparative research. The objective’s inherent flexibility allows for a diverse range of SA assessment methods, as it does not impose strict constraints on the temporal scope of assessment. In contrast, the second objective concerns real-time SA assessment, designed to provide insights for enhancing the functionality of the automated driving system. This necessitates a continuous and dynamic evaluation of driver SA, thereby suggesting process indices to provide nonintrusive methods that integrate seamlessly into the operational flow of the vehicle. To expand upon this, an exploration of the potential technological advancements that could facilitate real-time SA assessment, such as advanced machine learning models or augmented reality interfaces, would provide a forward-looking perspective. The obtrusive measurement techniques, such as those in the state-of-knowledge metrics category, are not recommended for this purpose. Additionally, performance and behavior analysis and subjective elevations do not align with the objectives of real-time assessment and thus should be considered as separate components of the overall SA assessment framework.
In conclusion, the assessment of driver SA during Level 3 AV takeovers necessitates a multifaceted approach. Detailed analysis of SA requirements and careful selection of assessment methods are crucial, with consideration given to the modality and medium of SA components. Eye-tracking tools, supplemented with physiological measures like EEG, offer insights for focused attention tasks, while freeze-probe techniques such as SAGAT are useful for peripheral attention, auditory, and haptic modalities. However, the validity of postevent probing and the influence of performance-related biases call for cautious application of these methods. Performance-based measures should be used judiciously due to their limitations in sensitivity and correlation with actual SA. Ultimately, combining objective and subjective measures, while acknowledging their respective limitations, provides a comprehensive understanding of driver SA during takeover events in Level 3 AVs.
Limitations and Future Research
This study has revealed certain limitations that could serve as a foundation for directing future research in this domain. Firstly, our study’s scope, while comprehensive, did not encompass an exhaustive review of literature concerning takeover performance or gaze behavior that does not directly inform SA inference. This limitation highlights the potential existence of critical, yet unexplored, factors influencing SA. Therefore, it is imperative to extend the exploration of existing literature and conduct empirical research to investigate unexamined variables. Additionally, there is an opportunity for future studies to examine the effects of currently identified factors on SA, perhaps by incorporating diverse takeover scenarios and a wide range of driver demographics. Our review also underscores the need for future research to broaden its focus beyond the frequently studied emergency takeovers to include planned takeovers. These differ significantly in their temporal urgency and lack the immediate accident-related pressures, allowing drivers more time to develop SA and perform takeover maneuvers at their own pace. This situation presents two primary areas for future investigation: first, a detailed analysis of the cognitive processes underlying drivers’ SA development and decision making during takeovers; and second, the development of algorithms capable of real-time prediction of drivers’ post-takeover performance based on their SA.
Moreover, our findings indicate significant impacts of driver age and driving experience on SA, suggesting the need for assistance systems tailored to different age groups. Many individual factors, including gender and personality traits such as patience, remain understudied. For instance, aspects such as drivers’ propensity to trust automation and the immersive quality of NDRT have received limited attention in existing literature and showed negligible impact on SA. Future work should aim to address these gaps, exploring additional individual factors that could influence driver SA in AV takeovers or validating the findings more robustly. A deeper understanding of how these individual factors impact the SA build-up process and takeover decision making will aid in developing customized systems tailored to individual drivers’ characteristics and needs. Additionally, despite drivers’ familiarity with AV systems, their vulnerability to emergency takeovers persists. This necessitates further exploration of possible emergency takeover scenarios within the system’s limitation. Consequently, motor vehicle management policies should establish specific training requirements, particularly for emergency takeovers, for drivers intending to use Level 3 AVs on road.
Secondly, the limitations of our study extend to the discussion on HVI design and SA assessment, which are grounded in the literature review. The review of empirical studies was specifically tailored to address the first research question, focusing on the development of a model for influential SA factors. Thus, this selective approach inherently restricts the breadth and variety of studies considered. Consequently, the findings and subsequent recommendations may not fully encapsulate the entire spectrum of relevant research. Future research should aim to uncover additional insights and considerations pertinent to HVI design and SA assessment during Level 3 AV takeovers by broadening the range of studies included in the literature review.
Lastly, a limitation of our study may arise from the nature of the empirical research it draws upon. Most of these studies were conducted using low or medium fidelity simulators, a choice driven by the inherent risks and practical challenges associated with performing takeover tasks on the road. Nevertheless, simulators often lack the full range of sensory feedback and unpredictability. The transferability of findings from simulated environments to actual driving scenarios remains uncertain. Future research is needed to validate the findings of simulator-based studies through field tests involving advanced driving simulators or instrumented vehicles equipped with safety measures to minimize risk. Conducting experiments in real-world driving conditions, despite its challenges, would offer invaluable insights into the dynamics of driver behavior and SA in more naturalistic settings.
Conclusion
This paper presents a systematic literature review that makes a significant contribution to the field of driving safety within the domain of conditionally AVs. It establishes a comprehensive conceptual framework that systematically organizes 23 factors influencing driver SA into four well-defined categories: task/system-related, situational, individual, and NDRT factors. This framework not only enhances our understanding of the multifaceted nature of SA but also underscores the complex interplay of various elements during control transitions in conditionally AVs. Additionally, the review conducts a thorough analysis of relevant situational information and evaluates effective communication methods to facilitate SA in specific takeover scenarios. The study also presents a detailed overview of SA assessment methods for conditionally AV takeovers. These insights provide a foundational basis for both future research and practical applications, aiming to refine driver SA and thereby improve driving safety in the evolving landscape of conditionally AV technology. In summary, this review emerges as a critical and invaluable resource for researchers and practitioners striving to advance the field of AV safety and driver–vehicle interaction.
Key Points
• Drawing upon a review of empirical evidence, this paper constructs a conceptual framework, outlining the multitude of factors that influence driver situation awareness during takeovers in Level 3 automated vehicles. • This paper provides a detailed overview of the situational information necessary for effective takeovers in Level 3 automated vehicles, laying the groundwork for the design of human–vehicle interfaces tailored to enhance driver situation awareness. • This paper reviews and evaluates various methodologies employed in assessing driver situation awareness during takeovers in Level 3 automated vehicles, offering insights and recommendations on selecting the most suitable assessment methods. • The insights gained from understanding driver situation awareness in the context of Level 3 automated vehicle takeovers have broad implications, including the design of human–vehicle interfaces, the assessment of situation awareness, and guiding future academic research in this domain.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This material is based upon work supported by the National Science Foundation under Grant No. (1850002) and PSU/Technion Marcus Funds.