
Abstract
Objective
Trade-offs between productivity, physical workload (PWL), and mental workload (MWL) were studied when integrating collaborative robots (cobots) into existing manual work by optimizing the allocation of tasks.
Background
As cobots become more widely introduced in the workplace and their capabilities greatly improved, there is a need to consider how they can best help their human partners.
Methods
A theoretical data-driven analysis was conducted using the O*NET Content Model to evaluate 16 selected jobs for associated work context, skills, and constraints. Associated work activities were ranked by potential for substitution by a cobot. PWL and MWL were estimated using variables from the O*Net database that represent variables for the Strain Index and NASA-TLX. An algorithm was developed to optimize work activity assignment to cobots and human workers according to their most suited abilities.
Results
Human workload for some jobs decreased while workload for some jobs increased after cobots were reassigned tasks, and residual human capacity was used to perform job activities designated the most important to increase productivity. The human workload for other jobs remained unchanged.
Conclusions
The changes in human workload from the introduction of cobots may not always be beneficial for the human worker unless trade-offs are considered.
INTRODUCTION
Robots have demonstrated tremendous utility as both independent and collaborative physical assistants in activities ranging from making deliveries in hospitals (Mutlu & Forlizzi, 2008; Niechwiadowicz & Khan, 2008) to working as assembly-line workers in factories (Akella et al., 1999; Jarrasse et al., 2014; Sauppé & Mutlu, 2015). Recent research into human-robot teaming, however, reveals a tremendously powerful yet unexplored potential for robots to not only serve as substitutes for people in repetitive, hazardous, or demanding tasks but to augment and complement human cognitive and physical capabilities, thereby enabling people to engage in work activities that were previously unsafe, unhealthy, mentally challenging, or unfeasible (Michalos et al., 2015; Pearce et al., 2018). A deeper understanding of how robots can augment, as opposed to artificially replicate, human cognitive and physical work capabilities, can open new frontiers, for example, performing manual handling tasks while avoiding musculoskeletal injuries (Barondess, et al., 2001), enabling multitasking in cognitively demanding jobs, or expanding employment opportunities for individuals with disabilities or age-related decline, thus reshaping human work across various populations.
Research on the allocation of manufacturing tasks to human and robot operators has mainly considered collision avoidance, while more recent work has considered cognitive and physical ergonomics (Michalos et al., 2014, 2015). Farber et al. (Faber et al., 2016) described an approach for considering ergonomics and human movement capability to ascertain the optimal assembly sequences for human-robot collaboration. This approach was not applied to actual tasks as not all influencing factors they identified could be quantified. Task allocation between collaborating human and robot teams has been considered based on a linear resource utilization model of workload (Tsarouchi et al., 2016). The concept of employing intelligent assist devices for reducing physical stress in manufacturing operations was introduced by Kruger et al. (Krüger et al., 2006). Robotic task sharing for the purpose of relieving the human operator from excessive physical demands of work, as well as for reducing human errors, was previously considered from an ergonomics perspective by Ogorodnikova (Ogorodnikova, 2008).
Previous work by Pearce et al. (2018) included a computational method to jointly consider performance and ergonomic characteristics, particularly makespan (i.e., production time) and physical strain, in human-robot teaming. This work addressed the limitations of prior work that solely focused on the production time to allocate work to multi-robot teams (Koes et al., 2005) or human-robot teams (Ponda et al., 2010) or that aimed to minimize the ergonomic impact on human workers through the introduction of a collaborative robot (Faber et al., 2016). This method included a process for modeling work elements, task constraints, production time, physical strain, and worker skills and a bi-objective optimization formulation using a mixed-integer linear program (MILP). The bi-objective formulation offered the ability to explore different weights for each objective and find task-allocation solutions that are Pareto optimal (Censor, 1977). Pearce et al. (2018) found that there were trade-offs in assigning different priorities to time and ergonomics, including completion time, total strain, and worker idle time. A simplified bi-objective approach by Schoen et al. (2020) assisted engineers in constructing human-robot collaborative task plans. While the interface and approach showed clear benefits for integrating optimization in the task planning process, the formulation of human and robot cost measures were left mostly to the discretion of the engineer, who may or may not have expertise in ergonomics.
Work activities are suitable for automation at varying levels. Activities that rely on interpersonal relationships, interactions with work teams, supervision, resolving conflicts, interacting with customers, or creativity may be more suitable for human workers. Alternatively, activities that offer challenging environmental conditions, hazardous job exposures, awkward body positioning, unchallenging repetitious work, or stressful time pressures may be more suitable for automation. Robots similarly have task performance and work-context constraints, including movement speed, dexterous manipulation, or reach limitations; inability to use certain tools or machinery designed for human use; and lacking appropriate end-effectors to perform work elements, such as applying the tape, tying knots, or placing packaging materials in tight spaces.
This study explores potential trade-offs between different jobs that are currently performed exclusively by human workers where a collaborative robotic assistant can potentially help reduce physical or mental workload (MWL) through the allocation of one or more tasks. To explore a wide variety of jobs, data were utilized from the Occupational Information Network (O*NET) system, developed by the U.S. Department of Labor and provides information on 1110 occupations within the U.S. economy (O*NET, 2020). A systematic review by Cifuentes et al. (2010) identified 28 studies that used O*NET to estimate work exposures in relation to health or safety outcomes. Evanoff et al. (2014) concluded that job exposure matrices based on O*Net can be used as a measure of workplace physical exposures for some studies of musculoskeletal disorders.
One purpose of the O*NET system is to describe the critical tasks for each occupation in the database. We utilized the O*NET database to conduct a data-driven investigation into possible human-robot task allocations for existing manual jobs based on optimizing productivity and human physical and mental tolerances. We define tolerance as the maximum workload to avoid harm while performing work activities. This includes physical and mental strain, discomfort, or injuries. We first formulated a translation from O*NET parameters to represent measures of human workload. Then, we quantified the match between parameters to capabilities of each agent (human and robot). These were combined in a multi-objective optimization that allocates subtasks to individual agents. We report on the quantitative and qualitative results of this analysis and offer commentary on how this approach can be used in the construction of human-robot collaborative programs.
METHODS
We first defined jobs and work activities in the context of the O*NET database. The methods used in the calculation of PWL and MWL are introduced and compared against parameters obtained from O*NET online and evaluated. Based on the O*NET Content Model, activities for selected jobs were evaluated for work context, skills, and constraints and ranked by suitability for automating or relying on human workers. We extracted the associated work activities, detailed work activities, and work context for every job identified. Each work context was similarly scored based on its potential for physical and environmental strain, discomfort, or injuries. Using these scores, the PWL and MWL for each job were calculated. Work activities were ranked based on their human-robot collaboration potential, and tolerances were evaluated in terms of given weights to PWL and MWL. According to cobot ability and the optimization algorithm, we determined which work activities were to be completed by the cobot. Critically, residual human capacity gained by allocating a task away from the human to the cobot was then reallocated to perform the activities of the job rated most important in O*Net. This assumed that the most important work activities were most critical to improving productivity. After work activities were allocated, the PWL and MWL were recalculated and compared with the pre-optimization PWL and MWL to determine if there is an improvement after optimization. The process is summarized in Figure 1. High-level summary of the process used in our approach.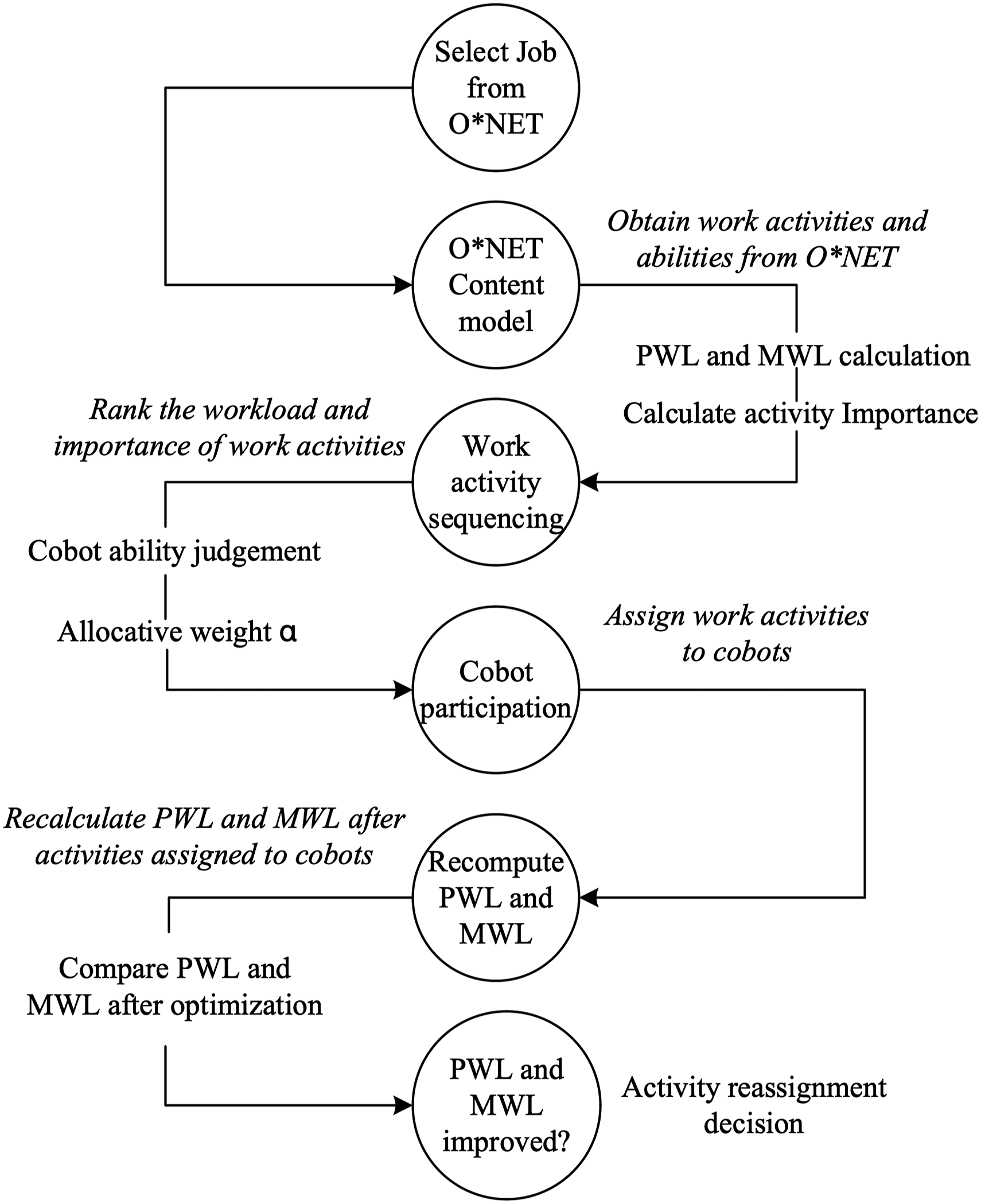
Human Work Qualification
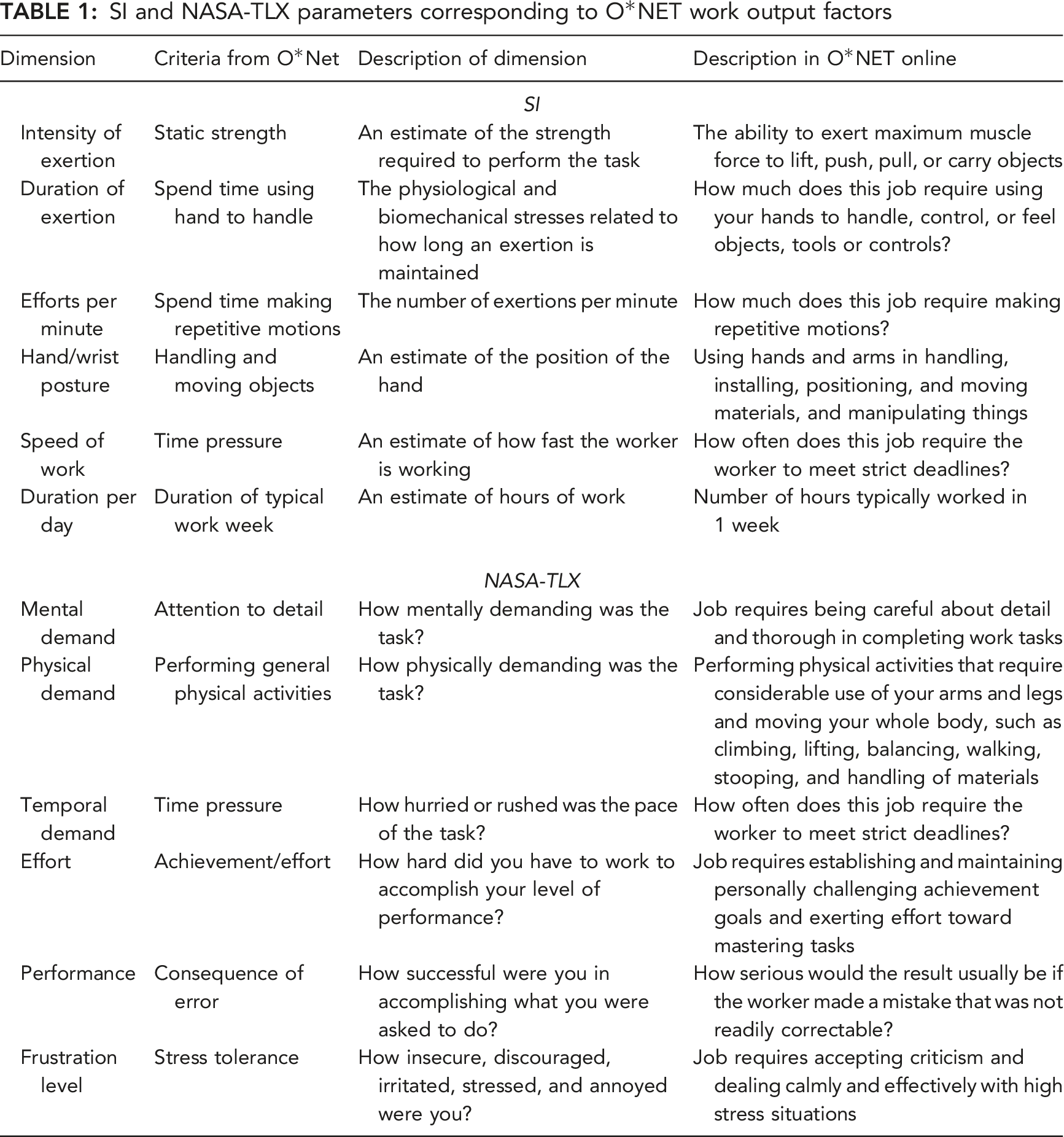
Representative hand intensive jobs currently performed by human workers selected from different industries in the O*NET database were evaluated for PWL and MWL. A job consists of one or more work activities performed during a workday, possibly in repeating cycles (Radwin et al., 1994). The O*NET work context database categorizes the physical and cognitive factors that influence how people do their work and the constraints under which a task can be performed. These factors include aspects of ergonomics such as environmental conditions (e.g., noise, thermal, and vibration), job hazards (e.g., radiation, falls, and diseases), and body positioning (e.g., sitting, standing, bending, twisting, repetitive motions). It also offers occupational data and including information on skills, abilities, knowledge, work activities, and interests associated with these occupations (Peterson et al., 2001). A key aspect that is missing from the O*NET Content Model are quantifications of the likelihood of fatigue or injury from job hazards and the degree of injury associated with their physical or mental workloads. Our task-analysis approach adapted current occupational ergonomics and workload models into the process. Instruments for quantifying PWL and MWL were selected due to corresponding O*NET Work Output Factors.
The strain index (SI) is an observational tool for assessing jobs for risk of work-related musculoskeletal disorders of the distal upper extremities (Moore & Garg, 1995). The SI was selected for evaluating the PWL due to its similarity with parameters obtainable from the O*NET database. There are six SI risk factors, including intensity of exertion (IE), duration of exertion (DE), efforts per minute (EM), hand/wrist posture (HWP), speed of work (SW), and duration of task per day (DD). For each task and each hand, these risk factors are assessed by assigning them to a category. Each of the factors is rated and their product is classified into three categories to predict job safety, with “low” (SI ≤ 3.0), “medium” (3.0 < SI < 7), and “high” (SI ≥ 7).
The NASA-Task Load Index (NASA-TLX) is a multi-dimensional scale designed to obtain workload estimates from one or more operators while they are performing a task or immediately afterward (Hart, 2006). It is the most applied MWL assessment tool and has been widely used in civil and military aviation, driving, nuclear, power plant control room operations, and air traffic control (Cao et al., 2009; Endsley & Rodgers, 1997; Hart, 2006). The NASA-TLX consists of six subscales to measure operator task performance, including mental demand (MD), physical demand (PD), temporal demand (TD), effort (E), performance (P), and frustration level (FL). Each parameter is rated from very low to very high and should be obtained from one or more operators while they are performing a task or immediately afterward.
SI and NASA-TLX parameters corresponding to O*NET work output factors
O*NET occupations studied
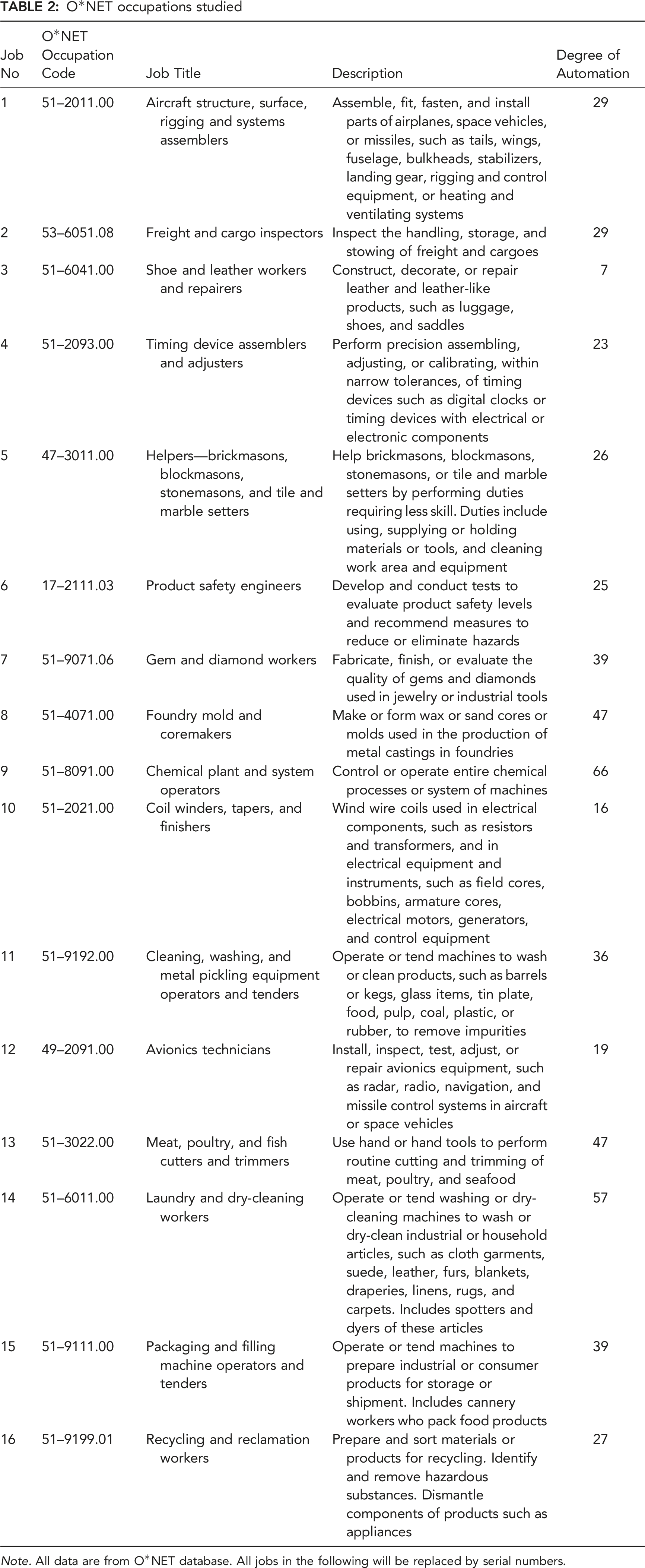
Note. All data are from O*NET database. All jobs in the following will be replaced by serial numbers.
Normalized PWL and MWL scores for each parameter of selected jobs From O*NET Online
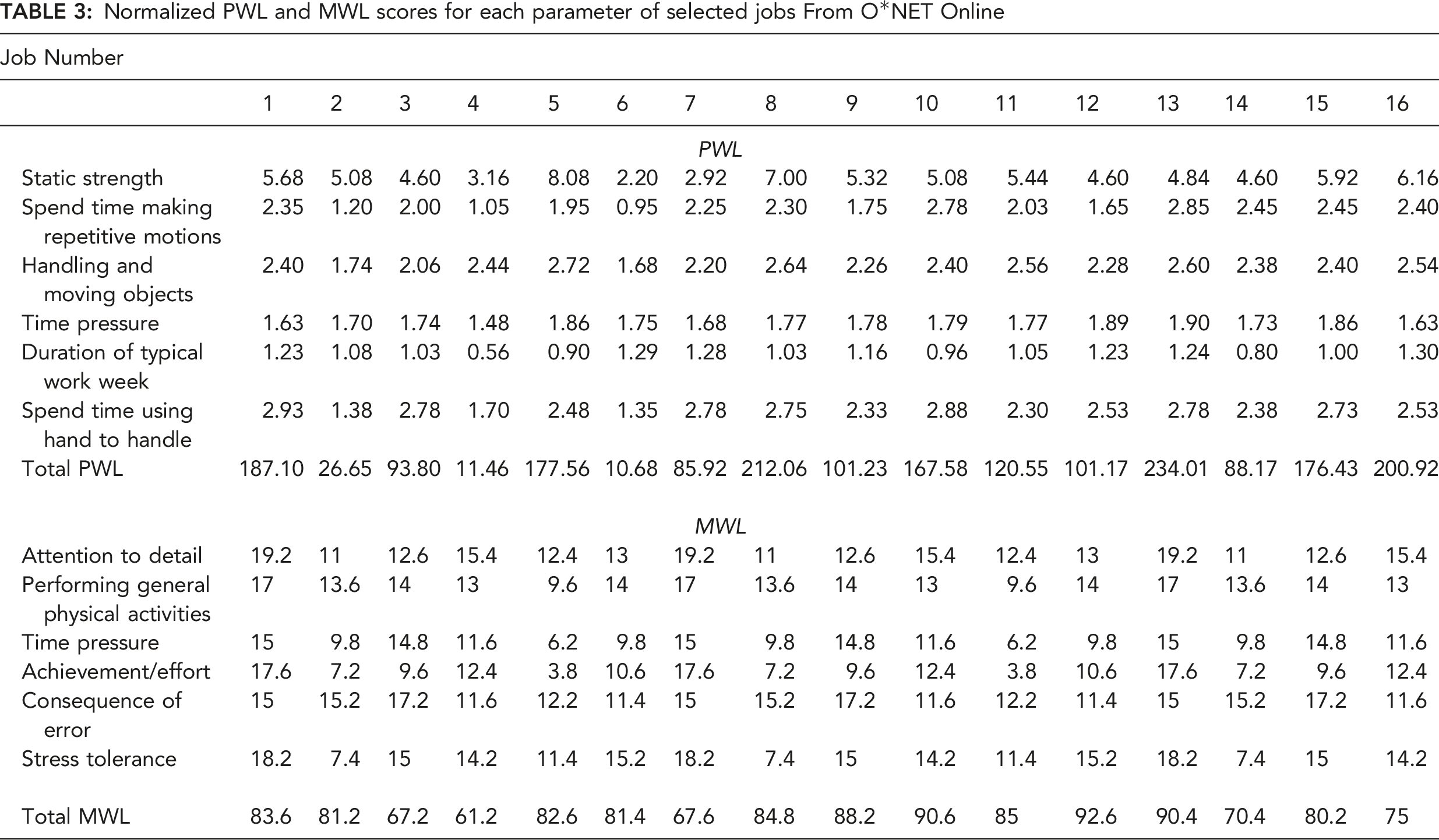
To select work activities to reassign to a cobot, the contribution of each work activity for the total task was calculated. O*NET provides a description of work activities for each job, and each job has an associated set of abilities required to perform it. Since O*NET does not provide associations between work activities themselves and abilities, these associations were generated for the human based on the descriptions provided. These abilities also need to be matched with the robot description below to determine whether the robot is good at them. Then, the PWL and MWL levels for each work activity were calculated based on the quantified importance of the work activity for each job and the required abilities, to assign high levels of workload tasks to the cobot.
Robot Work Qualification
Human-robot teaming can potentially leverage the strength and endurance of robots with the flexibility and decision-making capabilities of human operators. Before deciding which work activities to assign to cobots, it is important to understand their ability to perform the task. A decision tree was developed based on reported robot capabilities (Figure 2). The goal of this decision tree was to return a singular, binary choice of whether a robot would be capable of executing the work activity. This decision would then be used in the allocation process to filter tasks that the robot could perform for possible selection. Because of the generality of some of the work activities, these judgments were also made in the general sense for the current analysis. Our decision process was guided by both technical feasibility, as demonstrated by state-of-the-art systems, and the general practices and capabilities a small to medium-sized enterprise would be able to implement and/or maintain such a system. To utilize this decision tree, the work activity is evaluated by each question in the tree. Each response leads to either another question, or a High or Low rating, at which point the decision process concludes. A High rating means that robot can perform the task, while a Low rating means that the robot cannot. Details about the task layout, available systems, and robot capabilities have a great bearing on the robot’s capability to perform a work activity. The current analysis makes these assessments in the general and abstract sense, but it is also possible to use this decision tree to generate a more customized and accurate result in specific cases where these properties are more clearly defined. Decision tree for evaluating robot ability to perform a work activity. This tree considers an individual work activity from the O*NET database as input and returns either a high (robot can perform the activity) or low (robot cannot perform the activity) decision rating.
The first decision in assessing robot abilities was whether the work activity required a non-static process. If the process can effectively be done as a single set of unchanging actions, a robot could be utilized to perform that activity. For example, Job 5’s Mix substances or compounds needed for work activities could be done with a robot that simply mixes a container at the press of a button. In contrast, Job 4’s Disassemble equipment for maintenance or repair requires the agent to react to the current state of the activity, and potentially respond to different states of the equipment. For activities where a static process can suffice, they are rated High, while those that cannot be completed in such a way continue down the tree.
The second decision was whether a feasible algorithm existed to handle the logic behind the non-static work activity. Such algorithms may include problem space search, neural networks, and machine learning (Andrychowicz et al., 2020; Thomas et al., 2018) or planning (Pearce et al., 2018; Schoen et al., 2020). Work activities for which there is no feasible algorithm (e.g., Job 6’s Researching Product Safety) are rated as Low, while work activities that have such an algorithm (e.g., Job 9’s Monitor equipment fluid levels) continue down the tree.
The third decision assessed whether sensing was required to execute the work activity. Sensing has come a long way, especially in the realms of computer vision. Numerous methods are available to handle identifying objects (Bhargava & Bansal, 2018; Guo et al., 2014; Myers et al., 2014), but usually these systems need to be heavily customized and remain somewhat fragile (Bhargava & Bansal, 2018). We note however that a wide range of input types that might need to be sensed, including vision, sound, or touch. If the process could be configured in a way to avoid requiring sensing (e.g., Job 12’s Analyze test or performance data to assess equipment operation), the work activity capability is rated High. In contrast, work activities that may require some sort of sensing, such as Job 13’s Inspect food products, must be further considered.
The final decision considered cases where sensing was required and assessed whether there was a way of modeling the relevant sensory feeds. Kadir et al. (2018) identified a primary challenge of cobots to be their inability to modify their behavior to handle variations in the workspace. The ability to modify their behavior in this way is dependent on their understanding of what those variations mean for the state of the workspace, and how to structure future work. There are some existing solutions that attempt to solve parts of this problem. For instance, deep learning for fault detection (Iqbal et al., 2019), human safety responsive control strategies (Michalos et al., 2015), computer vision for PCB inspection (Mar et al., 2011), or language and conversation systems (Leite et al., 2016; Robb et al., 2019) have been considered. Computer vision applications, when feasible, have shown efficacy. For instance, CoSTAR (Paxton et al., 2017) allows engineers to construct manufacturing tasks that rely on object recognition. For other sensory inputs (e.g., voice), the current successes with modeling still trail human levels of comprehension. For work activities with well-modeled sensory feeds such that they can reason sufficiently about the environment, (e.g., Job 2’s Measure product or material dimensions), they are rated High. If such modeling is not currently possible, or is impractical (e.g., Job 16’s Repair production equipment or tools), they are rated Low.
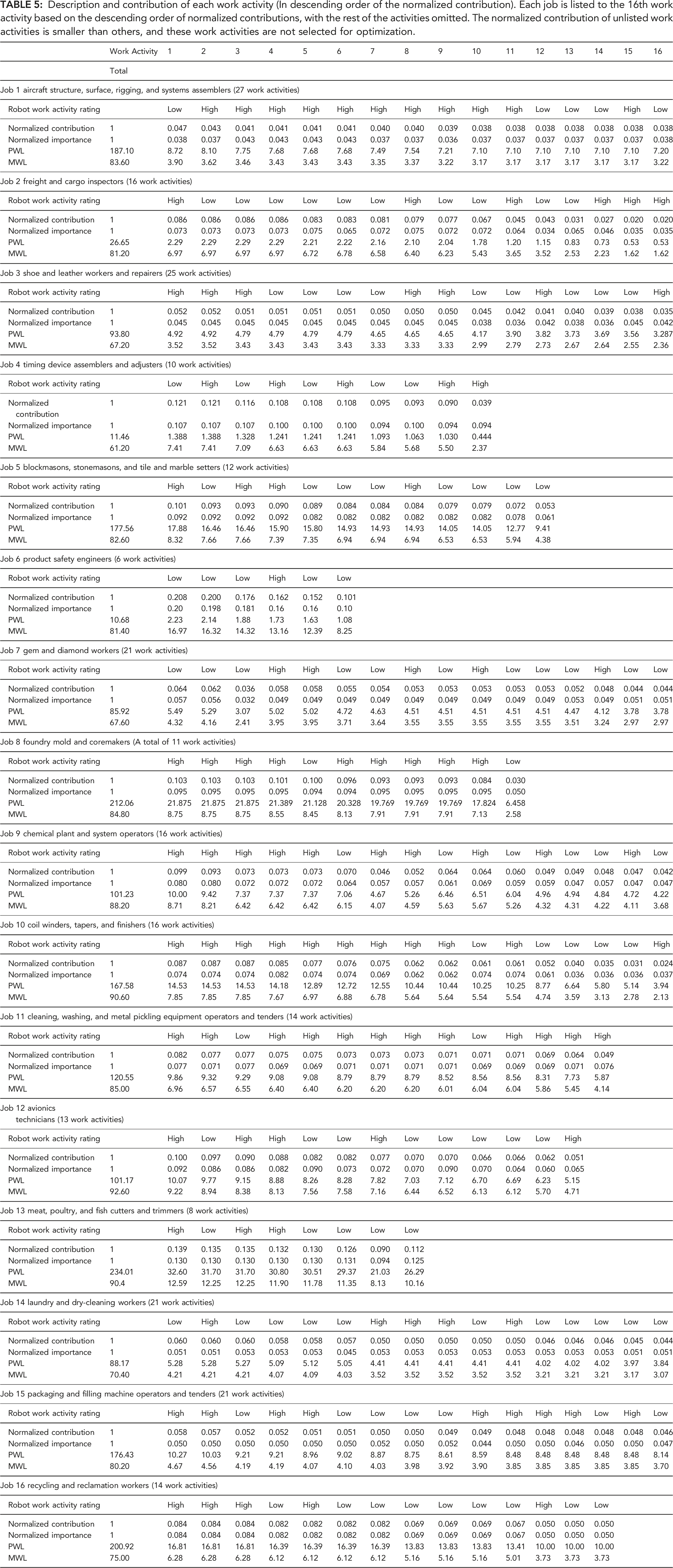
It is important to note that while some jobs contain similar or identical work activities as others, each work activity might end up with a different rating, depending on the assumptions associated with the job. For example, Job 7 has the work activity Operate Grinding Equipment, much like Job 16. This work activity is rated differently between the two, since in the context of the first, the grinding is likely done on a small stone or custom art piece, which is also likely the end product. Since there is a large amount of variability in the grinding targets, the sensory environment is poorly modeled. In contrast, the grinding in Job 16 is likely for destructive purposes, and could be done with a much simpler process, for which, a limited understanding of this sensory environment would be possible. Thus, Job 7’s version of this work activity table is rated Low, while Job 16’s is rated High. A final decision for each Job’s work activities is included in Table 5.
Optimization Approach
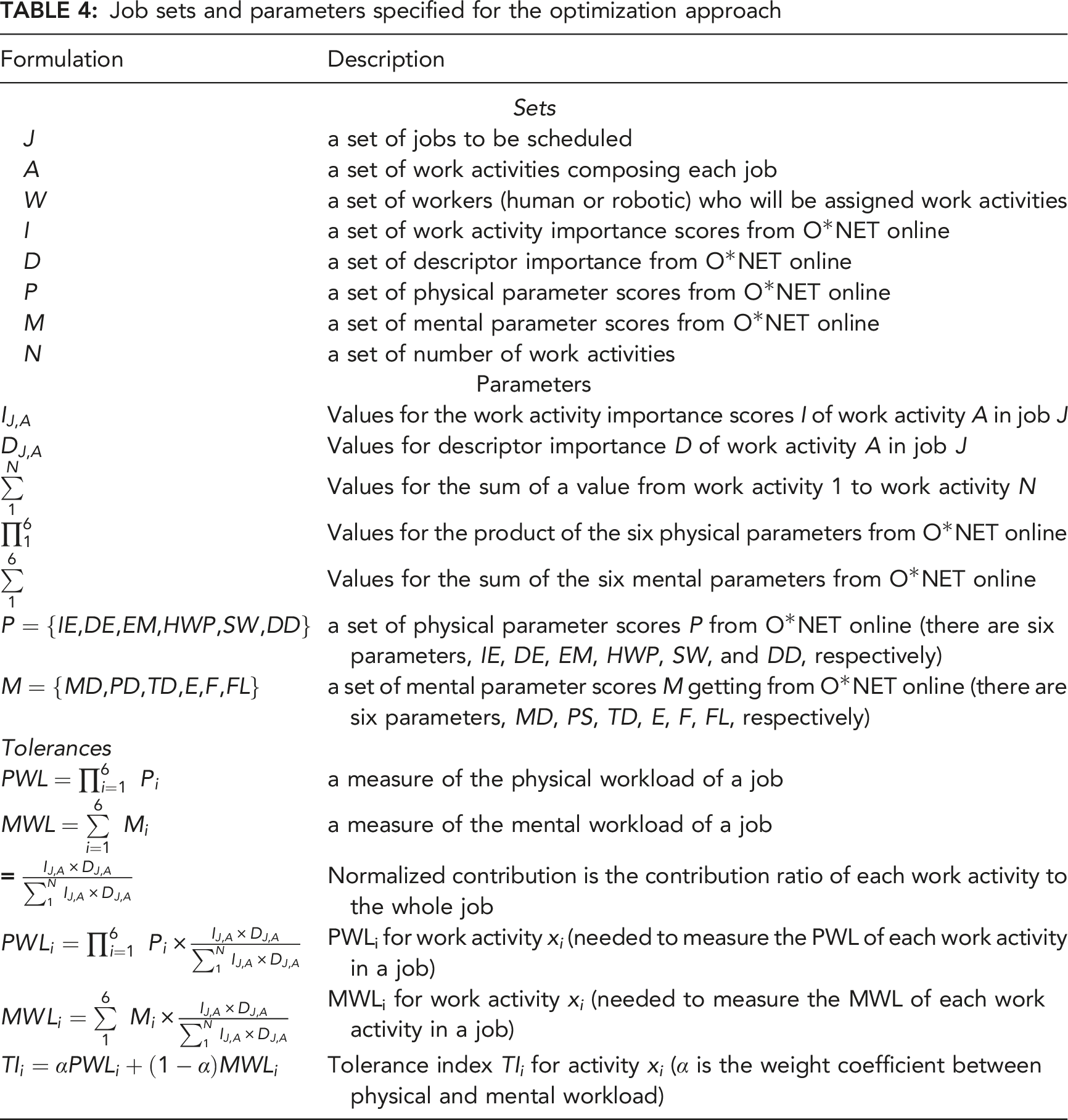
Job sets and parameters specified for the optimization approach
The following assumptions are introduced for an optimal assignment policy:
For each activity
For an activity
No strain index exists for robots, that is,
Due to the orders of magnitude difference between PWL and MWL, a coefficient is needed to convert the weights between PWL and MWL. Hence, α represents the proportion of PWL in overall job tolerances. In contrast, 1-α, which presents the proportion of MWL in the overall job tolerances.
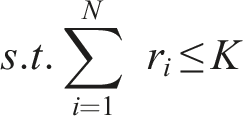
The total number of activities that the robot can be assigned in the process is limited by K, where
Consider the following objective: The total tolerance index of a job is defined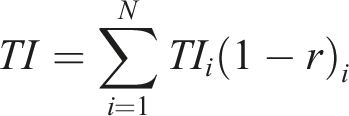
It is preferred that the cobot with high compatibility can replace human operations with a high tolerance score. In other words, the search space can be reduced by limiting activities 

Quantitative Results
Description and contribution of each work activity (In descending order of the normalized contribution). Each job is listed to the 16th work activity based on the descending order of normalized contributions, with the rest of the activities omitted. The normalized contribution of unlisted work activities is smaller than others, and these work activities are not selected for optimization.
The PWL and MWL changes for each job before and after optimally assigning tasks to the cobot and human worker are shown in Figure 3. Similar trends were observed for Jobs 2, 3, 5, 9, and 14, indicating that PWL and MWL decreased after optimization. Conversely, PWL and MWL increased post-optimization for Jobs 1, 4, 6, 7, 10, 11, 12, 13, and 15. It is worth noting that the PWL and MWL remained the same pre- and post-optimization for Jobs 8 and 16. The PWL and MWL for each job before and after optimization. The squares ■ represent PWL and MWL for the original job and the circles • represent PWL and MWL for the optimized job. When there is only one black square, the original and optimized values are coincident. WA is the serial number of work activities that are replaced during the optimization process in each job. RA is the serial number of work activity that is reassigned to the human in each job.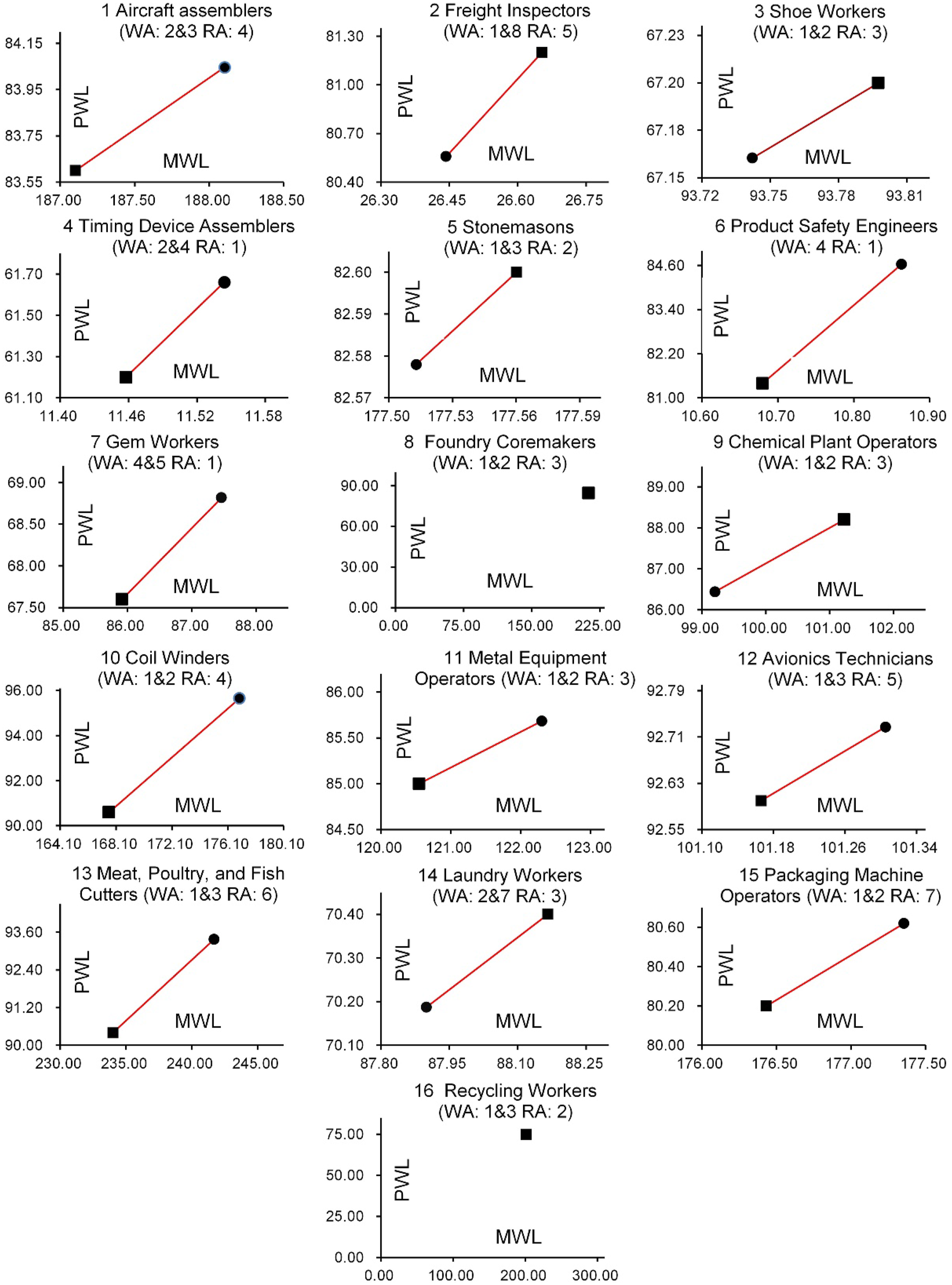
DISCUSSION
Jobs That Benefit From a Cobot Assistant
Some jobs showed both reductions in PWL and MWL after assigning work activities to the cobot. The remaining work activities were redistributed to the human worker according to their order of importance, as quantified in the O*NET database. If these work activities were of high importance but imposed little demand on workload, the human worker benefited. On the contrary, if jobs where work activities were of high importance but imposed greater demands, the human worker had greater workload.
Considering the work scenario, if work activities within a job cannot be completed in parallel by robots and humans working together, it is uncertain whether the work will benefit from collaboration. Although PWL and MWL may be improved when the human worker is idle, it does not necessarily improve productivity. If more work activities can be performed in parallel, the human worker will have residual capacity to perform other work activities. When the reassignment of work activities was of high importance, but the workload requirements were low, reassignment often resulted in improved workload while increasing productivity. Cobots excel either for mostly physical or mostly mental tasks. Therefore, if the cobot was capable of performing major work activities that had high levels of PWL and MWL and the human worker was reassigned to these work activities after the cobot has completed them, the optimizer would have more options to assign work activities to the human worker and may find solutions that are more desirable.
Consider Job 14 (Laundry and Dry-Cleaning Workers) where the robot was allocated work activities 2 (Operate garment treatment equipment) and 7 (Lubricate production equipment), and the extended human work activity was 3 (Sew clothing or other articles). This allocation is reasonable given that both robot activities are ones that could be programmed with either static programs or dynamic ones with minimal sensing. In comparison, the extended human work activity is one that requires careful custom work that is likely impossible to create general programs for a cobot. Furthermore, it is likely that if given additional time, this allocation would result in improved performance. A similar pattern occurred for other jobs, such as Job 2 (Freight and Cargo Inspectors), Job 3 (Shoe and Leather Workers and Repairers), and Job 16 (Recycling and Reclamation Workers).
In general, physical work activities that were of high importance benefited most from a cobot assistant. Cobots are good at exerting static strength for repetitive, prolonged, or continuous tasks, and they are better suited to work with a high level of physical workload. By contrast, humans are better at mental abilities rather than physical abilities, such as problem sensing, quality control analysis, and problem-solving. If a work activity required greater physical capabilities, the more likely it was assigned to a cobot. At the same time, if the work activity was also among the most important of all work activities, then the work activity might be assigned to the robot to benefit the whole job, as cobots are better suited to perform physical activities for long periods of time.
Jobs That do not Benefit From a Cobot Assistant
We have also identified scenarios that yielded undesirable outcomes when a robotic assistant was introduced. After assigning some work activities that meet the requirements for a cobot, the human worker was left with idle capacity that could be filled with additional work. In our algorithm, we assumed that capacity would be filled with the most important activity that the robot is incapable of performing, presumably to increase the overall output. If the activity that was selected was particularly demanding, it can have negative effects on PWL or MWL, depending on the work activity’s abilities.
An example of this situation can be seen in Job 4 (Timing Device Assemblers and Adjusters). The robot was assigned work activities 2 (Reshape small metal components for precision assembly) and 4 (Apply lubricants or coolants to workpieces), while work activity 1 (Disassemble equipment for maintenance or repair) for the human workers was extended. While having a robot assisting likely reduced some workload for the human, the human’s reassignment of the highly important work activity 1, which requires a great deal of dexterity and arm-hand steadiness, can be physically demanding when repeated for extended periods of time. This resulted in an overall increased workload, despite the assistance of the robot. Other Jobs 7 (Gem and Diamond Workers) and 12 (Avionics Technicians) presented a similar allocation pattern. Alternatively, the robot’s assistance sometimes failed to offset the cost of the additional human workload in cases where the extended work activity was relatively trivial, but nevertheless straining when repeated. This type of pattern was seen in Jobs 1 (Aircraft Structure, Surfaces, Rigging, and Systems Assemblers), 13 (Meat, Poultry, and Fish Cutters and Trimmers), and 15 (Packaging and Filling Machine Operators and Tenders).
There is no doubt that cobots promise many benefits, including low-cost automation and flexibility in small-batch production. However, these results indicated that according to the order of importance of residual work activities, when work activities redistributed to humans had less ability requirements and higher workload, it led to an increase in the overall workload. When cobots are introduced to help improve productivity, it therefore is also necessary to consider the effect of the assignment of human surplus capacity.
PWL versus MWL
For several cases in this study, we saw that the tolerances before and after optimization had different outcomes. There were some cases where the PWL increased and the MWL decreased after optimization, or vice versa. The tolerances of overall work presented variations when PWL and MWL were weighted differently. When that happens, it is important that the weights for PLW and MWL are considered in a manner that allows for minimal tolerances. Although PWL was much greater than MWL in some cases due to the calculation methods of PWL and MWL, the degree of change before and after optimization should be compared in practice.
Work activities that required different abilities had PWL and MWL scores that varied. Specifically, the tolerances for pre- and post-optimization remained unchanged when the ability and workload required by the redistributed work activities coincided with the original work activity, and tolerances persisted regardless of the weight of PWL and MWL. In this case, while the cobot improved productivity, the workload remained unchanged before and after optimization. The variable TI combines a weighted value of PWL and MWL to obtain the total tolerance value. Although this summation is a theoretical construct, there is precedence for considering their combination. Young et al. (2015) conclude that the interaction between MWL and PWL are interdependent in the quantification of workload limits that specify when workers are approaching or exceeding their performance tolerances. Marras and Hancock (2014) contend that the mind and body cannot be separated in ergonomics. PWL is in fact a component of MWL in the NASA-TLX. Basahel and Ajovalasit (2010) found that light physical activity could compensate for the performance decrements imposed by mental underload.
Limitations and Future Directions
Although we used parameters from O*NET online to approximate PWL and MWL, the parameters were not direct measures, which means they are similar, but not identical. It is likely that for a specific application, actual measures of PWL and MWL from that context need to be collected. Future research will apply the SI and NASA-TLX to actual jobs. The strain index was selected as a multi-factor quantitative prototypical measure of physical workload for the distal upper limb because it has been widely used and studied for validity (Spielholz, et al., 2008). Given the theoretical nature of the current study, it is not possible to include individual differences or other complementary factors. Similarly, the NASA-TLX was selected because of its widespread usage and the correspondence between O*NET on-line variables and these measures of PWL and MWL. Although we used parameters from O*Net online to approximate PWL and MWL, these parameters were not direct measures, which means they are similar, but not identical. We anticipate that future applications of this work will require actual measures of PWL and MWL by the employing the SI and NASA-TLX instruments to actual industrial tasks.
As with the SI and NASA-TLX, resulting quantities under completely different conditions and factors can be equivalent. In the algorithm, for each activity in a job, we calculated the PWL and MWL, and the activities with the highest workload and meeting the conditions for the assignment of the cobots were assigned to the cobots. Hence, whether the different conditions had the same result or not, in the algorithm, the activities which meet the conditions for the assignment were assigned to the cobot. The selection of the 16 jobs were not random, but the outcome of the analysis is significant by the knowledge of the possibility that PWL or MWL can change either way with the introduction of robotic assistants for performing specific tasks. This approach does not account for actual cobots performing actual tasks. The cobot’s capability rating for each work activity is the result of careful literature review and expert questioning, but in reality, cobot capabilities are highly dependent on the specifics of the work environment and task requirements While job context was taken into account when assessing work activities, considerable variation is likely across instances of the same job. Moreover, product variation may lead to changes in the requirements not captured in a general work activity description. Therefore, the applicability of our general approach is uncertain for specific job contexts without that information, but it is possible to reassess the robot’s capability—as well as human PWL and MWL measures—in these specific contexts and redo the allocation with our method, thus producing more accurate and customized assessments when more of this information of the jobs is known. We also do not consider any costs for using the cobot in the optimization objective function. Cost factors, such as wear and tear, energy consumption, worker training, and implementation difficulty would be important to consider for future research. These hypothetical conditions that could provide physical or mental loads do not necessarily mean that when a task that is allocated to the robot because of an unsuitable tolerance value, may actually be hazardous to the health of the operator.
The potentially complex relationships between work activities were not taken into account. We assumed that each work activity was independent and can be operated in parallel, but in practice, we need to consider cases where there are temporal or spatial interactions between work activities, or when single work activities could be themselves collaborative processes. In addition, we did not consider situations where changing the workspace or work cell to allow human and robot collaboration could have downstream effects on the workload. These downstream effects could be across related jobs in the same workspace and impact subsequent workspace and activities in a production line. Given the higher productivity of the optimized job, other jobs dependent on the output from the job in question could be impacted negatively if trying to adjust to that change in productivity. This could be addressed by considering the entire ecosystem of jobs in a given site and considering how the outputs of one may affect the others.
The variable K (the number of jobs the robot could be assigned) was limited to two in this study in order to reduce the number of variables and enable comparisons across jobs. Due to the convergence of diminishing results trend given our residual calculation and the specific abilities available, even if the K values selected are different, the variation trend of PWL and MWL scores is similar. Therefore, a representative case of K=2 is selected for discussion. In a job where work activities are chained together, thereby requiring prior execution of other work activities, choosing a low K may minimize agent handovers or context switches. In other cases, the choice of K may have to be adjusted to a higher value to fully leverage the cobot, such as when work activities can be performed in parallel. A more extensive consideration of K could be investigated in the future.
CONCLUSIONS
In this paper, we demonstrate an approach using the O*NET Online database to consider productivity and human tolerances simultaneously for integrating a collaborative robot into a manufacturing process. We present a variation of the tolerances as a measure of the sum of physical and mental workload of each work activity in a job and use its value to evaluate the change of workload pre- and post-optimization. We discuss trade-offs on whether humans use redundant abilities to work with cobots after assigning some work activities to the cobot. The evidence from this study suggests that productivity and the changes in human tolerances should be considered when involving cobots. Larger studies with longer follow-up are needed to be the next step that identifies the relationship between productivity and worker tolerances in real-world factory work, which presents collaborative simulation using cobots.
Footnotes
Acknowledgments
This research received support from the National Science Foundation (Award No. 1928425).
Key Points
An approach using the O*NET Online database for considering productivity and human tolerances together for integrating a collaborative robot into a manufacturing process was developed. A theoretical framework was built to compare the trade-offs between PWL and MWL after assigning work activities to the cobot. The changes in human workload through the introduction of cobots are not always beneficial and the productivity and the changes of human workload need to be considered in the production involving cobots.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Directorate for Engineering (1928425).
Li Liu is a PhD candidate in industrial engineering at the Northeastern University (Shenyang, China). She was a visiting student in the Department of Industrial and Systems Engineering, University of Wisconsin-Madison. She has BS and MS degrees in industrial engineering from the Northeastern University.
Andrew J. Schoen is a PhD student in computer sciences at the University of Wisconsin-Madison. He received BS degrees in psychology and biology and a MS in computer sciences from the University of Wisconsin-Madison.
Curt Henrichs is a graduate student in computer sciences at the University of Wisconsin-Madison. He has a BS in computer engineering from the Milwaukee School of Engineering.
Yajun Zhang is pursuing his PhD in control science and engineering at Southeast University, Nanjing (Jiangsu, China). He is a visiting student in the Department of Industrial and Systems Engineering, University of Wisconsin-Madison.
Jingshan Li is a professor in industrial and systems engineering at the University of Wisconsin-Madison. He received a BS, degree from Tsinghua University, MS degree from Chinese Academy of Sciences, and PhD from the University of Michigan.
Bilge Mutlu is the Sheldon B. and Marianne S. Lubar Professor of Computer Science at the University of Wisconsin-Madison. He received a BID degree from the Middle East Technical University, an MS degree from Istanbul University, and MDes and PhD degrees from the Carnegie Mellon University.
Robert G. Radwin is Duane H. and Dorothy M. Bluemke Professor in the College of Engineering, University of Wisconsin-Madison. He has a BS from New York University and MS and PhD degrees from the University of Michigan.