
Abstract
Objective
Assess operator performance in a simulation of US Coast Guard small boat recovery to a larger vessel on a large scale, six degree-of-freedom, full motion simulator.
Background
Studies of human performance in small boat recovery task have never been conducted on a high amplitude, low frequency simulator. Empirical evidence of small boat recovery task performance in challenging motion conditions is needed to inform future maritime systems designs.
Method
Experienced active-duty boat crewmembers (N = 13) conducted a small boat recovery task in three sea states on the Vertical Motion Simulator (VMS) at the NASA Ames Research Center. Task performance was assessed using a task equivalent for time to complete the task. Participant behaviors associated with increasing motion severity were observed.
Results
Task performance declined as motion conditions became more severe. Participants were more likely to use at least one hand to maintain balance during motion conditions, becoming more frequent with increasing motion severity. Many participants used one hand to complete the task despite contrary instructions and previous experience.
Conclusion
Two design recommendations were proposed to counter declining task performance in increasingly severe motion conditions. Handholds available to participants during the task, and task design supporting single handed completion were recommended for small boat recovery systems.
Application
This research is directly applicable to gross motor tasks requiring simultaneous maintenance of balance in a maritime environment, and may be extended to other environments where humans experience complex motions while completing tasks.
The United States Coast Guard (USCG) routinely deploys over-the-horizon (OTH) boats from cutters (vessels 65 feet long or greater) for missions such as search and rescue, and law enforcement operations. These missions are conducted in sea states ranging from calm to sea state 5, with 13-foot-high waves with winds up to 27 knots on the Davis Sea State Scale (United States Coast Guard, 2013). Launch and recovery of OTH boats from cutters is limited by sea state (up to sea state 4 with 8-foot high waves or less) due, in part, to the danger posed to crewmembers during the process. A critical role in small boat recovery is the boat crewmember (BCM) located in the bow of the boat. The BCM’s task is to connect a 24- to 48-pound hook lowered from the cutter by a davit crane to a contact point on the OTH boat known as the lifting-eye. Once connected, a davit crane operator on board the cutter uses the davit crane to raise the OTH boat from the water and secure it on the deck of the cutter.
BCM performance during the small boat recovery task is affected by environmental conditions. During the small boat recovery, the BCM must stand largely unsupported on the OTH, which endures sea motion and wind, and guide the hook affected by the cutter’s motion and wind, to the lifting eye on the OTH. In this dynamic operation, the BCM’s effort is focused on identifying a “window of opportunity.” That is, a period during which the waves are calmer and the relative position of the boat to the cutter is such that the hook is close enough to the lifting eye to complete the connection. The windows of opportunity are further enhanced by the davit crane operator, who manages cable length to optimize the BCM’s opportunity to connect the hook. Hence, one important component of the entire task is the timing of BCM’s decision to reach for and grab the hook, and try to connect it to the lifting eye during a window of opportunity.
From a performance perspective, environmental motion during the small boat recovery task can lead to “motion induced interruptions – MIIs.” Introduced in the 1980s, an MII was defined as an incident in which a standing individual slips, slides, or loses his/her balance because of environmental motion, or temporarily pauses or abandons performing his/her task to maintain or regain balance (Baitis et al., 1984; Crossland & Lloyd, 1993; Crossland & Rich, 1998; Graham, 1990; Graham et al., 1992). Later, the definition of an MII was expanded to include all task interruptions caused by motion (McCauley et al., 2005), and refined models were developed to assess human postural equilibrium in complex motion environments (Langlois, 2010; Wedge & Langlois, 2003). Also, research expanded to include human pre-emptive body movements and actions, sometimes referred to as motion-induced corrections (Duncan et al., 2013; Holmes et al., 2005; Matsangas & McCauley, 2013). These pre-emptive movements reflect the effect of human abilities on performance in a moving environment such as adaptation to motion profiles, prediction of impending motions, and choosing to maintain a protective stance and delay task completion in order to endure a severe motion (Malone, 1977; Stoffregen et al., 2013; Varlet et al., 2015).
The bulk of MII literature is focused on assessing loss of balance events for the purpose of quantitative model development and validation (Baitis et al., 1984; Crossland & Lloyd, 1993), with the goal of translating the model into engineering models for hull design (Dobie, 2000; Gaglione et al., 2016). To date, attempts to quantify motion parameters that cause MIIs have over-predicted MIIs, likely due to the same human abilities that contribute to the pre-emptive motions represented in the latest studies. A reliable quantitative model that is easily adapted into naval engineering specifications and accurately predicts MIIs remains elusive (Langlois et al., 2009; Schweigart & Mergner, 2008). Additional insight into supporting human performance through improved systems designs may be found in examining the same human abilities that confound quantitative MII predictions.
Studies investigating human performance in a moving environment conducted in a laboratory setting have been limited to low amplitude simulators (Greve et al., 2007; Pearcey et al., 2015; Stoffregen et al., 2000). Studies that have been conducted on a vessel while underway have nearly always been conducted on a much larger ship than the OTH, with a limited range of sea conditions due to time and resources constraints (Crossland & Lloyd, 1993; Grech et al., 2008; Langlois et al., 2009). Notably, no studies were found on a high amplitude, low frequency simulator capable of accurately representing sea states commonly encountered by operators conducting a small boat recovery task.
Data from the USCG Electronic Reporting of Occupational Injuries and Illnesses (eMISREP) database documents 13 mishaps between 2012 and 2017 which resulted in material loss or injury during the small boat recovery task. These mishaps prompted the organization to partner with NASA Ames Research Center to study OTH boat recoveries on the vertical motion simulator (VMS) in order to better understand human performance in small boat recoveries.
Based on the aforementioned background, the overarching aim of the study was to assess operator performance in the small boat recovery on the large scale, six degree-of-freedom, full motion simulator. Under this aim, the study had three goals. Our first goal was to assess the effect of sea state 3 to 5 on the performance of the forward BCM during the small boat recovery task. Our hypothesis was that performance in the small boat recovery task would decrease as sea state increased. Our second goal was to document forward BCM behaviors employed to maintain postural equilibrium and complete the task when affected by environmental motion perturbations. The last study goal was to provide recommendations based on the study observations to the USCG leadership to improve BCM safety in future small boat designs.
Method
Participants
Active duty personnel from USCG Base Alameda (N = 13) volunteered to participate in the study. Participants were on average 33.2 years of age (range 26–45) and predominantly males (n = 11, 84.6%). Volunteers were excluded from the study if they were not medically qualified to conduct small boat recoveries in the USCG or if they had medical conditions that might affect their performance (pain, acute or chronic balance problems, acute or chronic sinus disorders).
Participants had been BCM qualified within the last two years and had conducted the small boat recovery task at the forward BCM position in at least five patrols. Participant experience was categorized into low (8), medium (3), and high (2) experience levels based on subject matter expert input on the number of patrols and repetitions of the task deemed appropriate for each category. All participants reported that they were medically qualified and met fitness requirements per the USCG Boat Crew Seamanship Manual (United States Coast Guard, 2003). This research complied with the tenets of the Declaration of Helsinki and was approved by the NASA Human Occupancy Review Board, the NASA Institutional Review Board, and the USCG Institutional Review Board.
Apparatus and Measurements
Questionnaires
Sleep logs were used to document participants’ sleep and wake up times. The pre-study questionnaire included demographic items (age, gender), whether participants had consumed alcohol for 12 hours prior to the experiment, items on participant fitness and qualification to serve as a boat crew, whether participants had been diagnosed with medical conditions which might affect their performance in the study (pain, acute or chronic balance problems, acute or chronic sinus disorders), and three validated instruments. The Motion Sickness Susceptibility Questionnaire (MSSQ) was used to assess susceptibility to motion sickness (Golding, 1998), whereas severity of motion sickness symptoms was assessed with the Motion Sickness Assessment Questionnaire – MSAQ (Gianaros et al., 2001). The Fatigue Severity Scale (FSS) was used to assess physiological fatigue (Krupp et al., 1989).
During the experiment participants were asked to rate their perceived physical demand with the Borg CR10 scale (Borg, 1982a, 1982b).
Apparatus
NASA designed and built a dimensionally accurate mockup of an OTH bow on an interchangeable cab for use on the VMS. The VMS is a high amplitude, low frequency 6 degree of freedom simulator. It is capable of replicating accurate motion profiles up to sea state 5 (significant wave height of 10.7 feet).
The mockup was comprised of an aluminum structure capped with aluminum sheet metal and covered with padded foam. A drawing of the OTH bow mockup is shown in Figure 1. Video cameras were placed on the median plane on the bow of the mockup (approximately waist level, offset to the participants’ right side to avoid the hook obstruction), under the bow of the boat on the median plane (foot level), on the left safety railing (waist level coronal plane), over the right shoulder approximately one foot above the safety lanyard, and an overhead camera for use by the safety observer. Drawing of OTH Bow mockup used on the VMS.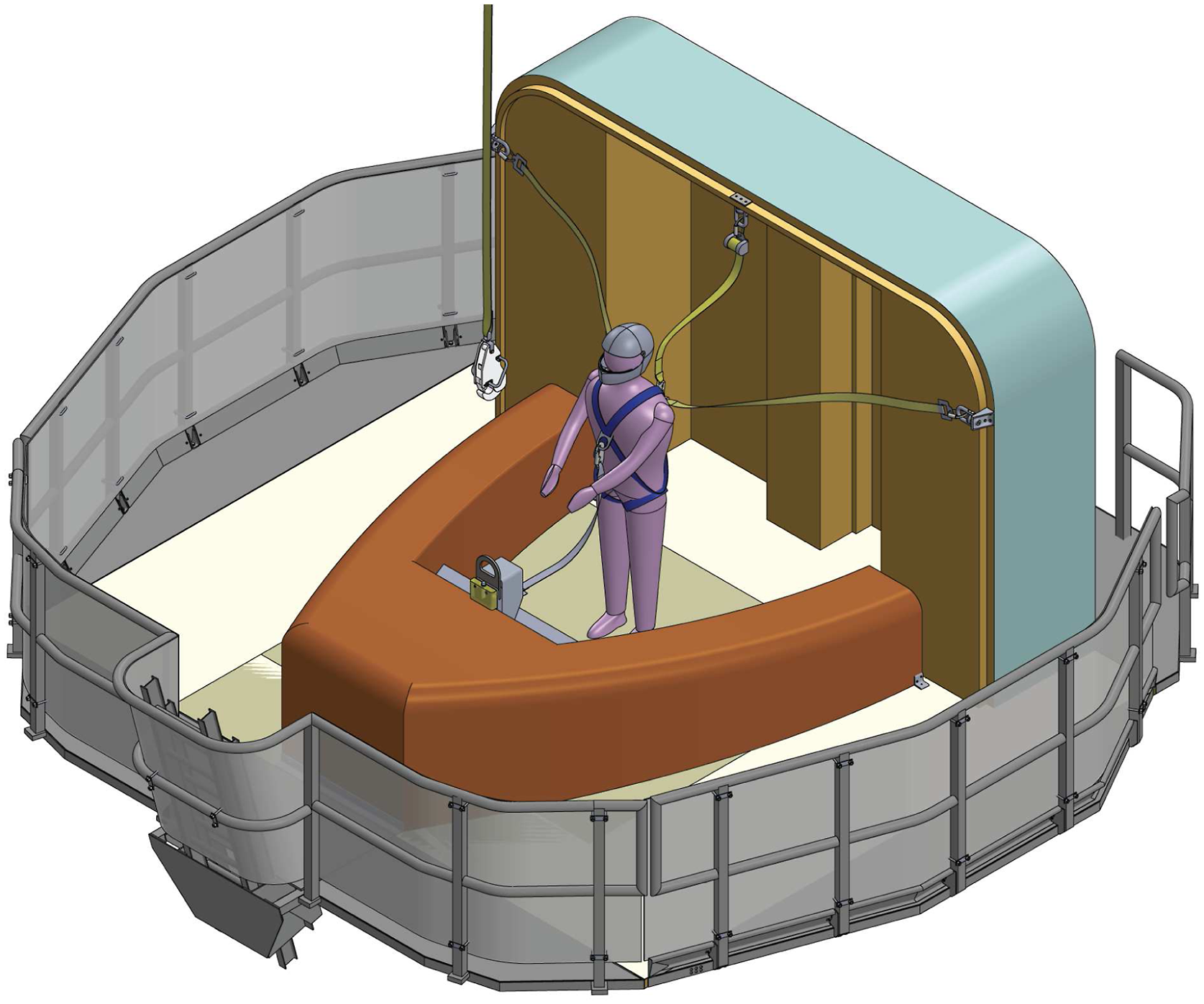
A one-pound dimensionally accurate model of a USCG davit hook wrapped in 3/8” neoprene was used in order to control the energy directed at the participant’s head. The hook was equipped with a breakaway magnet that separated at pulling forces greater than 16 pounds. This ensured that the hook would not damage equipment while the motion ramped down after connection. The hook was lowered from a lifting crane overhead in the VMS building, which served as a rudimentary simulation of a davit. The crane was unidirectional and had fixed speed motion. At the start of each trial, a VMS engineer lowered the hook from a fixed point out of reach of the participant, to a point that had been mathematically determined to be within range of the lifting eye at specific opportunities during the motion profile. A photoelectric sensor on the lifting eye detected the hook when three inches or less to the lifting eye. The detection was indicative of successful task completion (hook connected), and triggered termination of the VMS motion via a slow ramp down.
Participants wore normal USCG gear, with wire facemask modification to the helmet to protect their face from impacts with the hook. In addition, participants were required to wear American Society for Testing and Materials (ASTM)-rated fall protection harnesses (lanyards) connected at the chest and the back to mitigate the risk of being thrown from the platform in the event of a motion runaway.
Motion profiles
OTH—IV motion profiles were generated from the US Navy Large Amplitude Motion Program (LAMP). Three sea states (SS) were modeled, i.e., SS 3 (2.9 feet significant wave height—SWH, 7.5 seconds modal period – MP), SS 4 (6.2 feet SWH, 8.8 seconds MP), and SS 5 (10.7 feet SWH, 13.0 seconds MP). The program generated multi-directional waves with a cosine squared spreading function, Bretschneider Spectra. The result was 400 second 6 degree of freedom motion profiles sampled at 0.02 seconds representing boat position at the OTH-IV center of gravity for each sea state. Motion was then translated from the OTH center of gravity to the standing position of the BCM at the bow, and then translated to the VMS rotational center in order to achieve accurate motion for the BCM on the VMS. Power spectral density checks confirmed that the translations had not distorted accelerations significantly from the original motion profiles. Each 400 second motion profile was then segmented into 180-second motion profiles, creating six different movement patterns for each sea state. The segmented motion profiles provided a variability of motion within each sea state and reduced the likelihood that participants would learn the motion profile for the sea state being tested.
Initially, the generated motion profiles could not reliably provide adequate lulls in the motion to connect the hook to the lifting eye. These “windows of opportunity” were developed using a low pass filter tailored to each motion profile by attenuating the motion for brief intervals where the lifting eye was already near the hook, thus keeping the hook in proximity to the lifting eye for long enough to allow for an opportunity to connect the hook. The “windows of opportunity” varied in timing and duration to avoid any learning effects (i.e., participants predicting the window of opportunity).
Procedure
After volunteering for the study, participants completed a preliminary consent form and they were asked to complete a sleep log for 3 days. On the day of the data collection, participants turned in the sleep log, signed a consent form, and they were screened for participating in the study. Next, they completed the pre-study questionnaire. NASA researchers conducted a safety briefing on the simulator platform and the participants donned safety gear and fall protection lanyards. Each participant went through four practice trials. The first trial allowed familiarization with the motion, the second tested the participant abort function, the third was a practice task completion and the fourth was a higher sea state practice. Based on field observations of the recovery task, participants were instructed to connect the hook with both hands.
Each participant experienced 36 trials, with 12 exposures to each sea state (motion profile segments within each state were pseudorandomized). After every sixth trial, participants were allowed a 10-minute rest. During each rest period, physical effort was assessed with the Borg CR10 scale (Borg, 1982b; Borg & Borg, 2001).
Analytical Plan
To prepare the data for analysis, we first identified the windows of opportunity: time periods in each motion profile during which the distance between the hook and the lifting eye less than six inches. Within each motion profile, the windows of opportunity were assigned a number based on the sequential appearance in the profile. Next, we used video analysis to identify when the procedure was completed, or if the trial was stopped early because the hook was disconnected. The variable to assess human performance (first goal of the study) in connecting the hook to the lifting eye was the order number of the opportunity when the procedure was completed.
In the post hoc video analysis, we conducted a preliminary review of a subset of videos, noting behaviors the participants were using to maintain balance and/or to complete the task. As the video review progressed, if a new significant behavior was observed, the previous videos were reviewed in order to ensure that all trials with a significant behavior were counted. In general, participant behaviors were fairly consistent, potentially due to their prior operational experience performing the task. Participant behaviors were grouped in three categories, that is, lower body posture, use of hands to maintain balance for the duration of the motion preceding the connection attempt, and use of hands to connect the hook. Use of hands to maintain balance for the duration of motion preceding the connection attempt was consistent, that is, participants did not change their use of hands or posture during the motion preceding a connection opportunity. Some participants maintained their manual strategy in their attempt to connect the hook, and some did not; some changed strategies trial by trial, so use of hands during the motion and in the connection attempt were categorized as two separate variables.
During post hoc analysis of the video recordings, we observed four levels of lower body postures: standing on both feet without touching the boat structure with any other part of their legs for the duration of the trial, standing on both feet pressing one knee against the boat structure, kneeling on one knee with the other leg bent and the foot on the deck, and kneeling on both knees. We observed three variations in hand use to maintain balance during the trial: both hands on the structure, one hand on the structure, or both hands free. Finally, when connecting the hook, we were interested in whether they used one or both hands to hold the hook during their attempt to connect it to the lifting eye. The occurrence of these behaviors (lower body posture, hand use during the task, hand use to complete the task) and their frequency by motion profile were used to assess our second study goal (to document behaviors employed to maintain postural equilibrium and complete the task).
Data were collected in 520 trials. Due to missing data, 56 trials were excluded from analysis; the missing data did not show a systematic pattern. After imputing data for four trials, analysis was based on 468 trials, i.e., 36 trials per participant (12 in each sea state). In 12 of the 468 trials, the magnet disconnected prior to the connection of the hook. These trials were considered censored, because a successful connection may have been achieved after the disconnect, but the numbered opportunity when it might have occurred was unknown. The connection opportunity for censored trials was extrapolated as a connection in the next opportunity after the disconnect occurred. For example, if the disconnection occurred on the first opportunity, it was marked as a connection at the second opportunity.
All data were screened for erroneous/anomalous entries and underwent descriptive statistical analysis (α = 0.05). Statistical analysis was conducted with JMP statistical software (JMP Pro 15; SAS Institute; Cary, NC). Summaries of continuous data are reported as mean ± standard deviation or median (interquartile range) as appropriate. Mixed effects analysis was used to assess whether perceived exertion increased during the experiment. Generalized linear regression analysis was used to investigate the association between the dependent variables of interest (order of number of the hook up window, lower body posture, the method of holding the hook for the connection) and sea state. The Wilcoxon Signed Rank test was used for pairwise comparisons.
Results
Participant State, Motion Sickness, and Fatigue
Participants had not consumed alcohol for 12 hours prior to the experiment, and slept on average 6.62 ± 0.682 hours of sleep the night before the data collection. The average FSS score before the commencement of the main data collection was 3.20 ± 0.740. Mixed effects analysis showed that during the experiment perceived exertion increased (p < 0.001). Although Borg CR10 ratings ranged between 0 and 4 and average perceived exertion increased during the experiment, at the end of the experiment average perceived exertion was less than 2 (equivalent to light effort). No significant relationships were found between participant experience and task performance or behaviors used to complete the task.
In terms of susceptibility to motion sickness, the median MSSQ score was 6.34 (IQR = 16.7) ranging from 0 to 35.6 (∼45th percentile of the susceptibility norms). Before the commencement of the main data collection, the median MSAQ Total score was very low (Mdn = 11.8, IQR = 5.56). After the completion of all trials MSAQ Total score was equivalent to the pre-study levels (Mdn = 13.2, IQR = 4.17; Wilcoxon Signed Rank test, S = 2.0, p = 0.990). None of the participants were highly susceptible to motion sickness, and the severity of symptoms typically associated with motion sickness was very low. Therefore, motion sickness symptoms were not developed at a level that the experimental results could be affected. Overall, our assessment of participants’ state before the main data collection did not identify any issues which might affect performance in the main task.
Performance in the Procedure
All hook up procedures were completed in the first three windows of opportunity: 428 (91.5%) procedures were completed in the first window, 38 (8.12%) in the second, and 2 (0.43%) in the third. Generalized linear regression analysis (model: X2(14) = 50.0, p < 0.001; Nagelkerke R2 = 0.220) showed that order number of the hook up window was associated with sea state (X2(2) = 31.6, p < 0.001). The higher the sea state the later the hook up procedure was completed (Figure 2). Specifically, the task was completed in the second window in 1.92% of the trials in SS 3, 4.49% in SS 4, and in 18.0% of the trials in SS 5. This means that there was a 2-fold increase in skipping the first window from SS 3 to SS 4, and a 4-fold increase from SS 4 to SS 5. The task was completed in the third window in 1 trial in SS 4 and in 1 trial in SS 5. Window of opportunity the hook procedure was completed by sea state. SS 3 (2.9 feet SWH, 7.5 second MP), SS 4 (6.2 feet SWH, 8.8 seconds MP), and SS 5 (10.7 feet SWH, 13.0 seconds MP).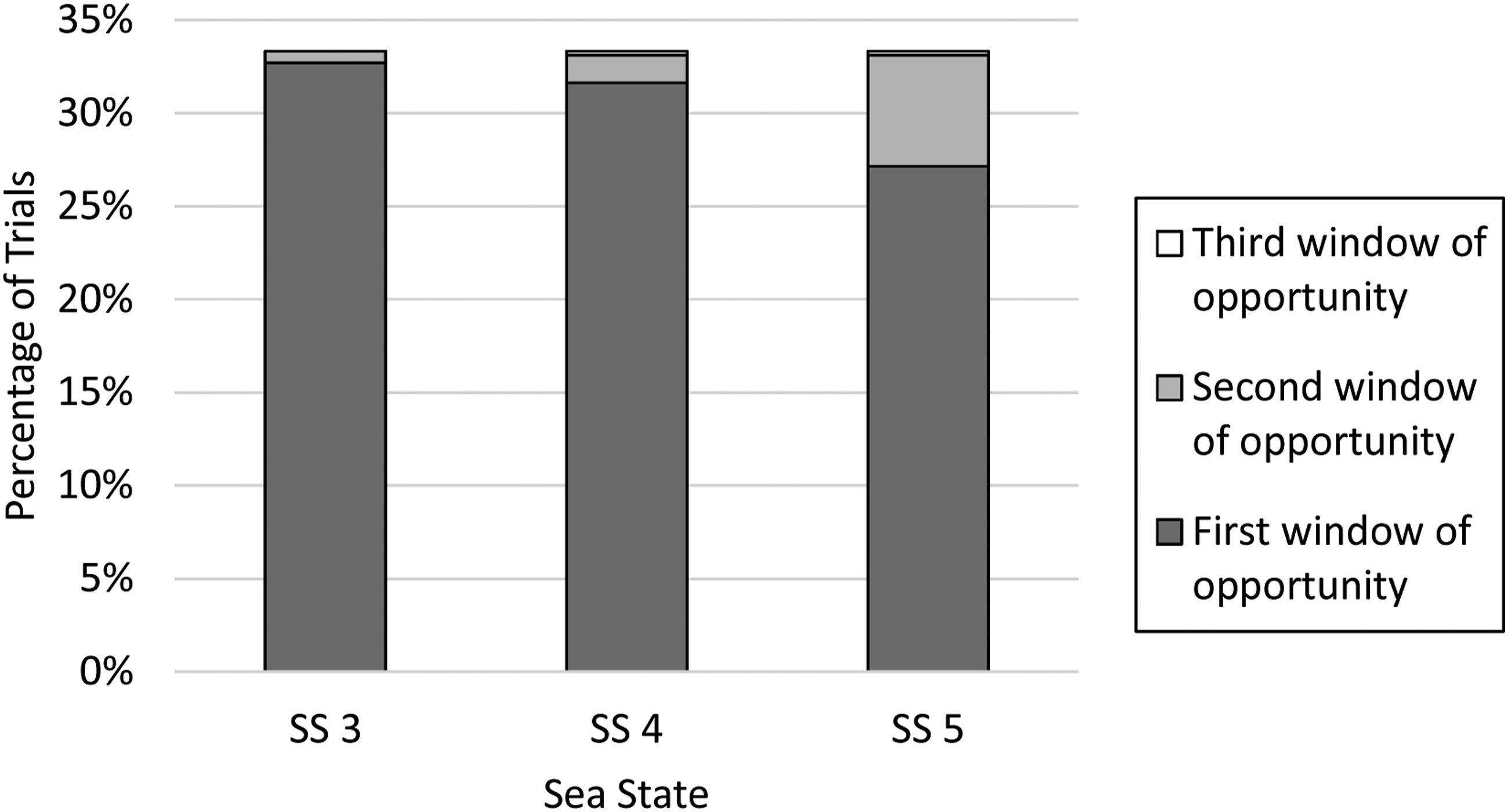
Posture During the Procedure
In terms of lower body posture, video analysis showed that participants stood on their feet without touching the boat structure with their legs in 222 (47.4%) trials, stood with one knee braced against the boat structure in 160 (34.2%) trials, knelt on both knees in 72 (15.4%) trials, and knelt on one knee in 14 (2.99%) trials. Generalized linear regression analysis (model: X2(42) = 920, p < 0.001; Nagelkerke R2 = 0.964) showed that lower body posture was not associated with sea state (X2(6) = 6.65, p = 0.354).
Video analysis also showed that participants used specific strategies to maintain their balance during the trials. As shown in Figure 3, in 411 (87.9%) trials participants used either one (391 trials, 83.6%) or both hands (20 trials, 4.27%) to hold on the structure. In contrast, participants had both their hands free during 57 (12.2%) trials. As shown in Figure 3, the prevalence of having hands free during the motion in SS 3 trials was approximately double compared to SS 4 and SS 5. Hand use during trials. SS 3 (2.9 feet SWH, 7.5 second MP), SS 4 (6.2 feet SWH, 8.8 seconds MP), and SS 5 (10.7 feet SWH, 13.0 seconds MP).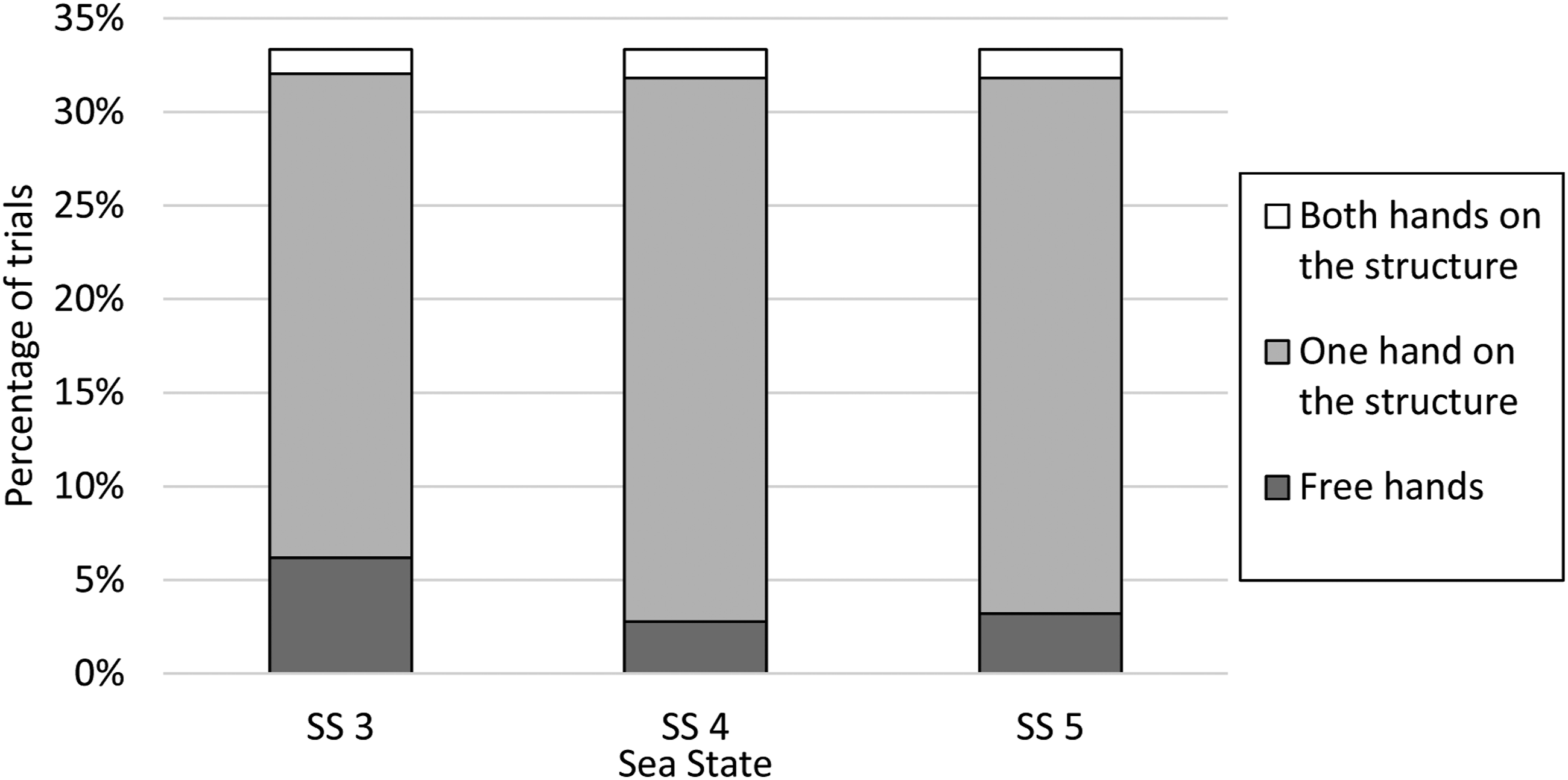
To connect the hook to the lifting eye, participants used both hands in 395 (84.4%) trials and one hand in 73 (15.6%) trials. Generalized linear regression analysis (model: X2(14) = 262, p < 0.001; Nagelkerke R2 = 0.740) showed that the method of holding the hook for the connection was not associated with sea state (p = 0.214). Of note, however, there was a trend of using only one hand (instead of both) in higher sea states.
Behavior combinations
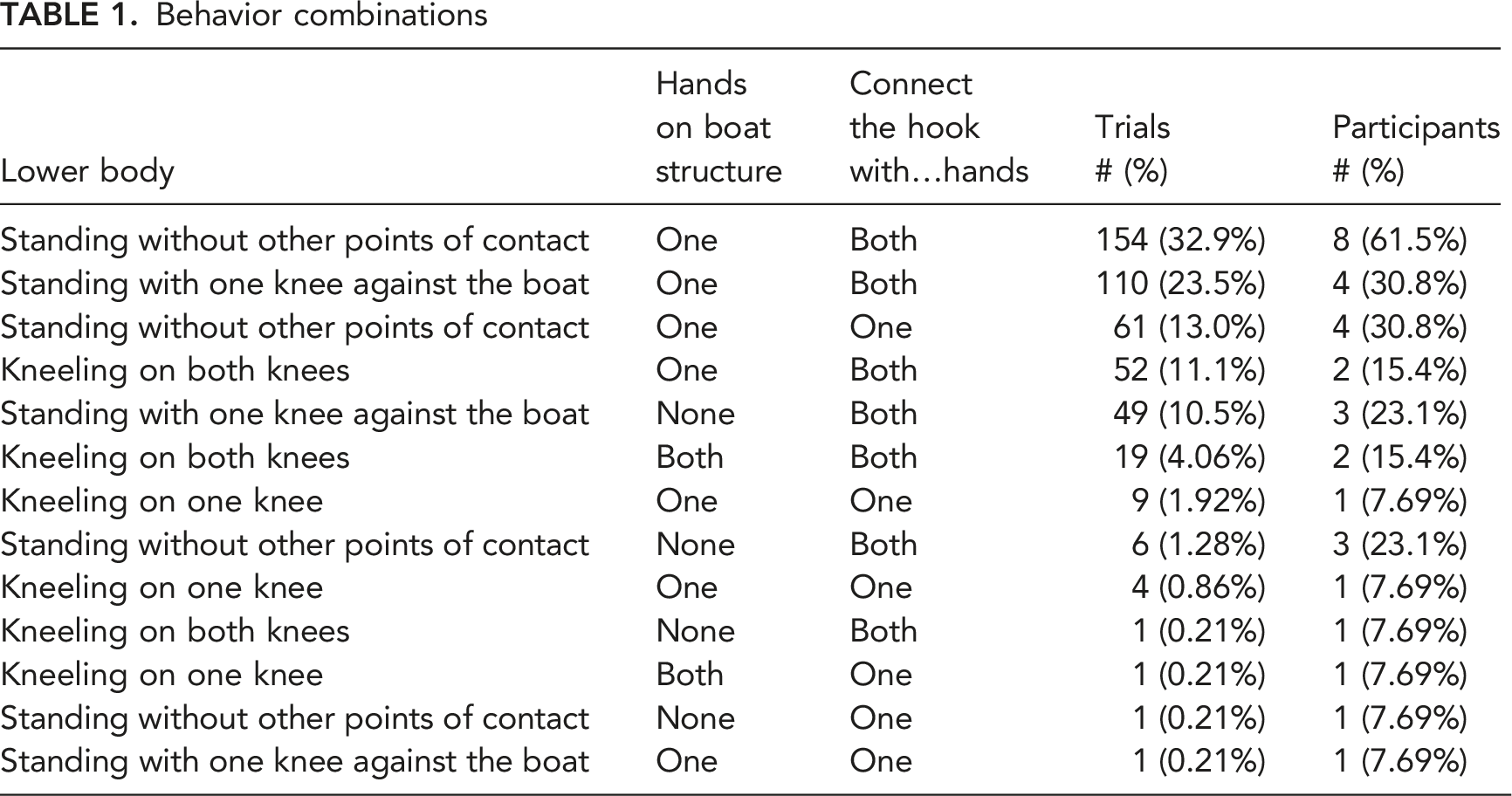
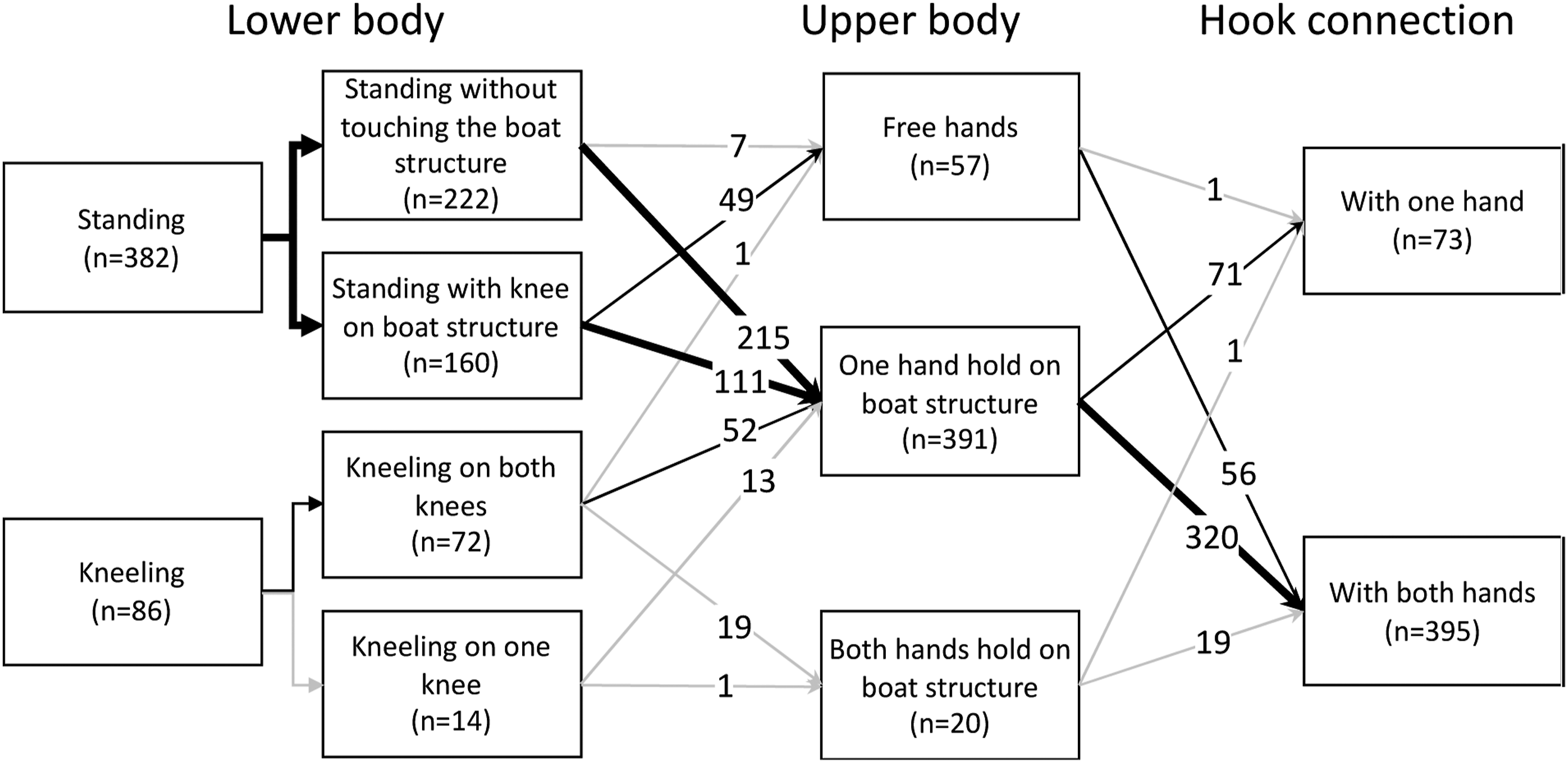
Participants’ behavior to maintain balance and connect the hook. Numbers denote number of trials.
Discussion
Our findings confirmed our hypothesis that as sea state increased, the window of opportunity in which participants successfully connected the hook increased, effectively extending the duration of the task. This finding suggests that the higher the sea state the longer it will take to complete the recovery task. Even though not surprising, the fact that there was a two-fold increase in skipping the first window of opportunity to connect the hook from SS 3 to SS 4, and a four-fold increase from SS 4 to SS 5 provides interesting insight into the changes in performance in motion conditions similar to what BCMs encounter in the operational environment.
A decline in human performance as motion perturbations increase is well documented in the literature, but results vary by the task. Studies have shown comparable results in a variety of tasks ranging from seated, micro motor tasks (Malone, 1977) to standing, manual material handling tasks (Duncan et al., 2012; McCleod et al., 1980), to cognitive tasks such as visual search (Duncan et al., 2020). These studies reflect a between-task variability in both task performance and MII occurrence within motion profiles. Task specific influences on postural sway (Fosha, 2018; Varlet et al., 2015), postural alignment in relationship to significant motions (Stoffregen et al., 2011), and the task influences of center-of-mass dynamics (Chaffin et al., 2006) are some of the complications that arise when attempting to generalize results from a specific study to a universal moving environment body of knowledge. These mixed results suggest that the nature of the task is as relevant to human performance outcomes as the characteristics of the motion in which the task is performed. Generalization of results should be confined to tasks with similar characteristics (independent standing and/or kneeling, overhead reach, and single or dual handed options, for example) on similar motion profiles (small vessel motion characteristics) for the most reliable insights. This limitation supports looking to task-specific human abilities to improve human performance outcomes.
Of note, we did not observe any slips, slides, loss of balance, or temporary task abandonment indicative of a conventional MII (Baitis et al., 1984; Crossland & Lloyd, 1993; Crossland & Rich, 1998; Graham, 1990; Graham et al., 1992). We interpret the delay in attempting to connect the hook in higher sea states to be more characteristic of a motion-induced correction (Duncan et al., 2013; Matsangas & McCauley, 2013). In this interpretation, participants pro-actively postponed their attempt to connect the hook in higher sea states, in order to achieve task completion without a significant (or observable) loss of balance. Pre-emptive actions and motion induced corrections partially mask a decline in performance, because humans leverage their abilities to prevent a true MII. Where hull design optimization for human performance reaches a limit, human abilities continue to compensate for motion. Employing a human-centered approach to systems design, we looked to identify system affordances that would support the pre-emptive actions humans used to maintain balance and complete the task (O’Neil, 2014; Shattuck, 2017). This approach may supplement hull design efforts with additional affordances to support human performance, thereby further improving total small boat recovery system performance.
In our task-specific observations, a number of interesting trends were identified in forward BCM behavior to maintain postural equilibrium and complete the task as sea state increased. During the trial, the dominant behavior of participants was to stand on both feet without touching the boat structure with the legs, with one hand on the boat structure. The second most frequent behavior was to stand on both feet with one knee against the boat and one hand on the boat structure. Only hand use changed as sea state increased, so we proposed incorporating handholds accessible to the BCM while completing the small boat recovery task as a design feature to improve BCM safety and task performance in future small boat designs. Future studies should explore the nature and positioning of stabilization affordances such as handholds to optimize the benefit to the human operators.
Second, in order to more closely represent the operational task, where two hands are required to manipulate a 24- to 48-pound hook, we decided to instruct participants to connect the hook with both hands. In spite of those instructions, and past experience using both hands in the operational environment, participants used only one hand to connect the hook in 73 trials, showing a trend to do so more frequently in higher sea states. We postulate that this behavior was facilitated by the lightweight hook used in the study, which allowed single-handed task completion. This artifact of the simulation revealed that humans tend to use only one hand to complete the task, if the task allows it. This phenomenon supported our second design recommendation: the small boat recovery task should be designed to allow task completion with only one hand (Fosha et al., 2019).
Study Limitations
Our study has a number of limitations to be noted. The safety lanyards the participants were required to wear are known to affect human balance (Cnyrim et al., 2009; Fosha, 2018). To minimize their effect, we ensured that the participants could move freely in all boundaries of the motion area. Also, for safety reasons, the hook used in the study weighed only one pound compared to the 24- to 48-pound hook used in USCG cutters. It is likely that a heavier hook has a more profound impact on human balance capabilities than we were able to measure or observe. The hook was equipped with a breakaway magnet that separated at pulling forces greater than 16 pounds, which caused some censored data, and limited our ability to observe human performance in those trials. However, the extrapolation of task completion to the next opportunity after censoring allowed enough clarity to infer that performance decreased as motion severity increased. Future studies exploring the effect of these safety measures on human performance during this task would allow more clarity regarding their effects to postural stability.
Individual differences such as reaction time and handedness were not assessed. We assessed the task and determined that it did not bias against either dominant hand, and the study sample was selected from the population of interest, with no preference for hand dominance. However, due to the small sample size, we could not rule out the effects of individual differences, or a bias based on uneven distribution of handedness in the general population or our sample. Future research could investigate the association between handedness and other relevant individual differences on performance in similar tasks.
There are number of layers of complexity to the operational task that were either prohibitively expensive or just impractical to model. For example, unlike the actual davit, the crane used in the study was unidirectional and had fixed speed motion. It was not possible to model the independent motion of the hook suspended from a cutter as would be found in the operational environment. Unlike to the actual conditions on cutter deployment, our participants were well rested (Myers et al., 2006), and environmental conditions that have been shown to influence human performance such as visible reference to a horizon could not be modeled (Mayo et al., 2011). Follow on studies intended to explore the effects of physical fatigue, cutter hook and OTH relative motion, or the effects of other operationally relevant environmental variables on performance present further avenues for future research.
Conclusion
In conclusion, our findings suggest that in higher sea states, the small boat recovery task takes longer to complete and BCM operators rely increasingly on using their hands on the structure of the vessel to maintain balance. Based on these findings, we provided two basic recommendations to the USCG leadership. First, to design future cutter boats with hand holds accessible to forward BCM operators during the small boat recovery task. Second, re-design the cutter boat recovery system to allow the BCM to connect the hook with one hand and grasp the handhold with the other hand. Together, these design features support the human capability to maintain balance while simultaneously attempting to connect the hook to the lifting eye. Future research should include prototype evaluation of these design features to verify the design of the handholds to the operator population, and ease of task completion at elevated sea states with a single-handed design.
Key Points
The higher the sea state the longer it will take to complete the small boat recovery task. During the recovery task, operators were more likely to use one or both hands on the boat structure to maintain balance during motion, a similar trend was observed in task completion. Future designs of small boats should incorporate handholds to support the forward BCM operators in their effort to maintain balance during motion and while attempting to connect the hook to the lifting eye. The cutter boat recovery system should be improved to enable connection with one hand, freeing up the other hand to maintain balance and increase operator safety.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the United States Coast Guard.
Disclaimer
The views expressed in this study are those of the authors and do not necessarily reflect the official policy or position of the Department of the Navy, Department of Defense, US Coast Guard, Department of Homeland Security, or the U.S. Government.
Rebecca A. Fosha is currently assigned to the Human Systems Integration Division at USCG Headquarters in Washington, D.C. She obtained her M.A. in applied experimental psychology from the University of West Florida, and a M.Sc. in human systems integration from the Naval Postgraduate School.
Panagiotis Matsangas is a research assistant professor in the Operations Research Department at the Naval Postgraduate School (NPS), Monterey, CA. He is a retired Commander of the Hellenic Navy. He received his Ph.D. (2013) and an M.Sc. (2004) from NPS in modeling, virtual environments, and simulation, and an M.Sc. (2004) in operations research from the same university.
Patrick F. Cravalho is currently a lecturer and major advisor for the San José State University Department of Psychology, and a former research associate for the Fatigue Countermeasures and the Visuomotor Control Laboratories in the HSI Division at NASA Ames Research Center. He obtained an M.A. in experimental psychology from San José State University in 2010 and a Ph.D. in educational psychology from Kent State University in 2015.
Kristopher M. Thornburg is currently a research engineer at the USCG Research and Development Center. He earned his PhD in industrial engineering from the University of Iowa in 2010 and served as a postdoctoral associate at the Massachusetts Institute of Technology. He was commissioned as an officer in 2012 and has served aboard three ships.