
Abstract
Objective
This study aims to compare the effectiveness and subjective acceptance of three designs for haptic lane-keeping assistance in truck driving.
Background
Haptic lane-keeping assistance provides steering torques toward a reference trajectory, either continuously or only when exceeding a bandwidth. These approaches have been previously investigated in driving simulators, but it is unclear how these generalize toward real-life truck driving.
Method
Three haptic lane-keeping algorithms to assist truck drivers were evaluated on a 6.3-km-long oval-shaped test track: (1) a single-bandwidth (SB) algorithm, which activated assistance torques when the predicted lateral deviation from lane center exceeded 0.4 m; (2) a double-bandwidth (DB) algorithm, which activated as SB, but deactivated after returning within 0.15 m lateral deviation; and (3) an algorithm providing assistance torques continuously (Cont) toward the lane center. Fifteen participants drove four trials each, one trial without and one for each haptic assistance design. Furthermore, participants drove with and without a concurrent visually distracting task.
Results
Compared to unsupported driving, all three assistance systems provided similar safety benefits in terms of decreased absolute lateral position and number of lane departures. Participants reported higher satisfaction and usability for Cont compared to SB.
Conclusion
The continuous assistance was better accepted than bandwidth assistance, a finding consistent with prior driving simulator research. Research is still needed to investigate the long-term effects of haptic assistance on reliance and after-effects.
Application
The present results are useful for designers of haptic lane-keeping assistance, as driver acceptance and performance are determinants of reliance and safety, respectively.
Introduction
One approach to improve road safety is to avoid unintended lane departures. In the Large Truck Crash Causation Study (Starnes, 2006), an estimated 30% of single-vehicle accidents involving trucks were reported to be departure accidents. Distracted drivers tend to have decreased lane-keeping performance (Engström et al., 2005) and exceed the lane boundaries more frequently as compared to nondistracted drivers (Young et al., 2013). Visual–manual interaction with nomadic or built-in devices is a major cause of driver distraction and contributes strongly to unintended lane departures (Olson et al., 2009; Peng et al., 2013; Victor et al., 2015).
Lane departure warning and lane-keeping assistance systems are known to have a positive effect on road safety (Jermakian, 2012; Nodine et al., 2011; Pravena et al., 2019). It has been argued that these systems have the potential to reduce single-vehicle, head-on, and sideswipe accidents for passenger cars by 30% (Sternlund et al., 2017) and for trucks by 48% (Hickman et al., 2015). The safety benefits are estimated to increase further when the technology becomes more effective (Penmetsa et al., 2019). However, if drivers perceive an assistance system as annoying, they are likely to disable it (Braitman et al., 2010). Designers of assistance systems are challenged to develop a system that not only yields safety benefits but avoids the annoyance that will lead to disuse.
Haptic Lane-Keeping Assistance
Haptic lane-keeping assistance systems provide torques on the steering wheel, which the driver can overrule or follow. The literature mentions two distinct approaches to assist the driver in the lane-keeping task (Gayko, 2012; Petermeijer, Abbink, et al., 2015), which are also found in commercially available vehicles (Consumer Reports, 2019). The first, here defined as “continuous feedback,” provides torques on the steering wheel that continuously guide the vehicle back to the lane center (Abbink et al., 2012; Flemisch et al., 2008; Griffiths & Gillespie, 2005; Mulder et al., 2012). The other approach, known as “bandwidth feedback,” provides torques only when a certain lateral position threshold is exceeded (Mohebbi et al., 2009; Scott & Gray, 2008; Stanley, 2006).
Bandwidth approach for lane-keeping assistance
Bandwidth assistance is based on the principle that drivers are allowed to control the vehicle as they like, and will only be corrected when a safety threshold is exceeded (De Winter & Dodou, 2011). This approach is in accordance with the view that humans generally exhibit satisficing behavior. That is, in normal driving, humans only exert control inputs when tolerable limits are about to be exceeded, instead of optimizing their lane center position (Godthelp et al., 1984; Hancock & Scallen, 1999). Bandwidth assistance can be considered as “Corrective Steering Support,” which is support given for a limited duration, as defined in the United Nations Regulation on steering equipment (United Nations, 2018).
Bandwidth assistance is designed to prevent crossing a lane boundary by, for example, single torque pulses (Montiglio et al., 2006). Suzuki and Jansson (2003) showed that a lane departure warning system using haptic signals on the steering wheel effectively warned distracted drivers that they were about to exceed the lane boundaries. Note that bandwidth assistance is different from lane departure warnings, which only warn the driver (e.g., using vibrations in the steering wheel; Navarro, et al., 2010; Tijerina et al., 1996), but do not actively contribute to prevention on the control level (see Beruscha et al., 2011 for a comprehensive overview of lane departure warning and support systems). Simulator studies have shown that bandwidth assistance yields improved lane-keeping performance compared to unsupported driving (Navarro, et al., 2006; Petermeijer, Abbink, & de Winter, 2015). However, a difficulty associated with bandwidth support is to determine appropriate bandwidth thresholds. If the assistance interferes late, there is too little time for correction, whereas corrections presented to the driver too early may be interpreted as false alarms (Parasuraman & Riley, 1997). Research has also shown that bandwidth (on/off) assistance can be annoying and challenging to interpret (Petermeijer, Abbink, & de Winter, 2015; Suzuki & Jansson, 2003).
Continuous approach for lane-keeping assistance
Continuous assistance systems generate guidance torques on the steering wheel based on current or future deviations from an “optimal” reference trajectory—often the lane center, but it can also be a personalized reference trajectory (Scholtens et al., 2018). Continuous feedback can be considered as “Automatically Commanded Steering Function category B1” (United Nations, 2018) as the controller torques are exerted to support the driver in the lane-keeping task.
It has been argued that continuous haptic assistance provides the driver with continuous feedback on the functionality and boundaries of the assistance and yields increased lane-keeping performance (Abbink et al., 2012). Continuous assistance provides physical interaction between the driver and the system, and the driver with feedback about the system’s boundaries and functionality (Abbink et al., 2012). However, it has also been argued that, in the long run, drivers using continuous assistance could suffer from overreliance, complacency, and after-effects (De Winter & Dodou, 2011).
Studies evaluating continuous haptic shared controllers have demonstrated improved lane-keeping performance compared to reference conditions without haptic assistance (Bian et al., 2019; Griffiths & Gillespie, 2005; Mulder, et al., 2008, 2012; Petermeijer, Abbink, & de Winter, 2015). However, continuous assistance may result in torque conflicts when the goals of the driver and assistance system do not align. For example, when the driver’s preferred and the system’s desired trajectory are not identical, the driver will have to overcome the system’s steering torques as well as the self-centering steering wheel torque and emergent torques from vehicle–road interactions (Fahrenkrog & Zlocki, 2013; Flemisch et al., 2008; Mulder, et al., 2012). Generally, continuous assistance systems with stronger guidance torques result in increased lane-keeping performance (Flemisch et al., 2008; Mars et al., 2014) but also yield increased conflict torques.
Evaluation of Continuous and Bandwidth Assistance
The majority of the studies investigating haptic bandwidth versus continuous assistance for lane keeping have been performed in driving simulators. For example, Petermeijer, Abbink, and de Winter (2015) performed a simulator study which showed that continuous systems yielded better performance, but higher physical effort, as compared to bandwidth systems. Blaschke et al. (2009) conducted an on-road study in a passenger car and found that, under conditions of visual distraction, lane-keeping assistance contributed to a reduction in the number of lane departures. Moreover, they showed that participants rated all systems as helpful (i.e., perceived to increase safety), although no evaluation of the satisfaction (i.e., the pleasantness of use) was performed.
The above results are not necessarily transferrable to truck driving. In truck driving, the safety margins are relatively small (i.e., approximately 0.5 m on a motorway) compared to car driving, which inherently leaves the truck drivers with little room to place the truck as they prefer. Consequently, a bandwidth system would need to engage early to be effective. Moreover, truck drivers are professionals, and despite the limited space in the lane, they exhibit distinct lane-keeping behavior, which could result in more conflicts for continuous systems. To our knowledge, no studies comparing the two haptic shared control approaches have been performed in trucks.
Aim and Hypotheses
This study compared the two haptic shared control approaches on a test track. Three distinct haptic assistance systems were evaluated in terms of lane-keeping performance, control activity, and self-reported acceptance. The first system used a single-bandwidth (SB) algorithm, which provided a constant torque activated based on the predicted lateral error with respect to the lane center. The second system adopted a hysteresis bandwidth, as in Petermeijer, Abbink, and de Winter (2015). The third system provided continuous feedback. We hypothesized that the assistance systems would be more beneficial for distracted drivers compared to nondistracted ones. Moreover, continuous assistance was expected to yield better lane-keeping behavior (e.g., decreased lateral deviation from lane center and number of lane departures) than the bandwidth assistance, but to suffer from lower acceptance ratings.
Method
Participants
Fifteen participants (2 women and 13 men) between 26 and 58 years of age (M = 43.4; SD = 8.5), licensed to drive a truck, and licensed to drive at the Hällered test facility, volunteered to take part in the experiment. All participants were employed by Volvo and had prior knowledge of Advance Driver Assistance Systems (ADAS). This research complied with the American Psychological Association Code of Ethics.
Apparatus
The experiment was conducted in a Volvo FH16 8 × 4 Rigid truck, which is 2.5 m wide and 10.35 m long. The truck was also equipped with an automatic gearbox and Volvo Adaptive Cruise Control. Sensor data from the CAN-bus were logged at 10 Hz. A tablet (8.4-in. Galaxy Tab S), which was placed within arm’s reach on the dashboard to the right, was used to present the secondary task.
Lateral Assistance Algorithms
Three assistance algorithms were evaluated in the experiment, which superimposed guidance torques (Tg, Nm) on the natural steering wheel. Guidance torques were based on a lateral and heading error with respect to the lane center (e lat and e head , respectively) that were predicted 0.6 s (look-ahead time) into the future by assuming constant speed and steering wheel angle. See Figure 1 for an illustrative representation of the assistance systems.
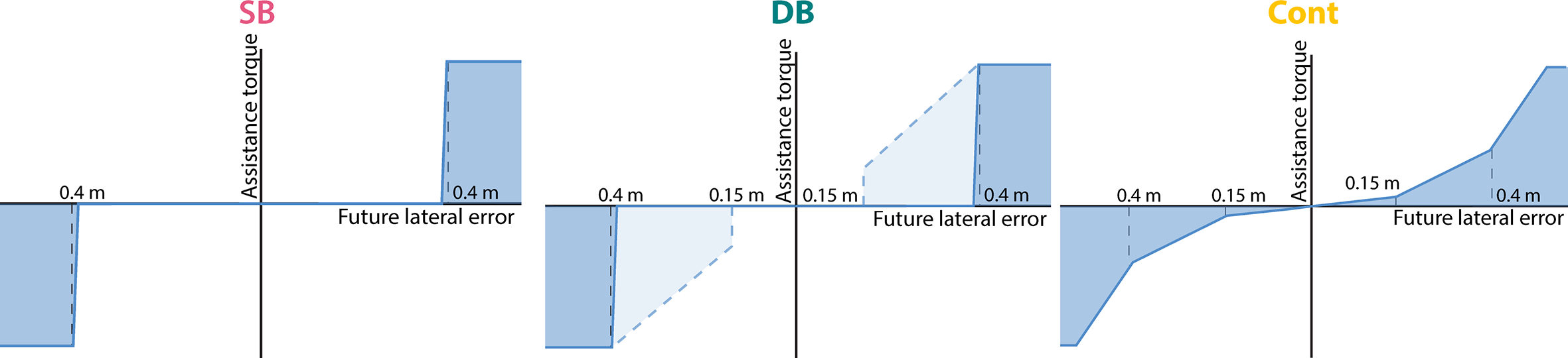
Illustration of the haptic lateral assistance systems. SB = single bandwidth; DB = double bandwidth; Cont = continuous.
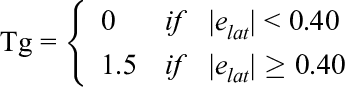
The SB algorithm exerted a constant Tg of 1.5 Nm when elat exceeded 0.4 m as shown in Equation 1 (see also Figure 1).
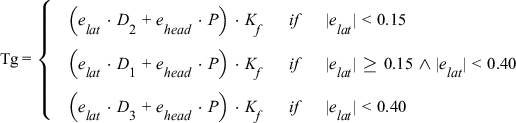
The double-bandwidth (DB) assistance algorithm used two states of operation. In State 1, no guidance was provided when elat was smaller than 0.4 m, as shown in Equation 2 (with D1 = 2.8 and Kf = 1.2). When elat became greater than 0.4 m, the system switched to State 2, in which the controller exerted Tg until elat became smaller than 0.15 m (Equation 3). If in State 2, the elat dropped below 0.15 m, the system switched to State 1 again. Accordingly, the system featured hysteresis; once activated, it guided the truck back to the middle of the lane (Figure 1).


The continuous assistance algorithm (Cont) provided continuous torques on the steering wheel based on elat and ehead (see Equation 4). Earlier studies suggested that a linear relationship (i.e., constant gain) between elat might result in many torque conflicts. Hence, an increasing proportional gain was implemented to mimic a quadratic torque profile by increasing the gains for elat in two steps (Figure 1). Note that the thresholds are similar to the ones used for the DB. The gains D1 and Kf were identical to the DB condition. The other gain settings were D2 = 2, D3 = 3.5 and P = 4.
Experiment Design
A 4 × 2 within-subjects repeated-measures design was used to evaluate the assistance systems (three systems and manual driving) with and without a visual–manual secondary task. All participants drove four trials, each assisted with SB, DB, Cont, or without assistance (i.e., manual). The order of the four assistance conditions was counterbalanced across participants using a Latin square method. The participants drove three laps per trial: one lap with the secondary task, one without the secondary task, and one lap in which the participant was allowed to explore the workings of the assistance system by intentionally exceeding the lane boundaries. The exploration lap was not driven for the manual condition. The trials with and without secondary task were counterbalanced across the first two laps (Figure 2).
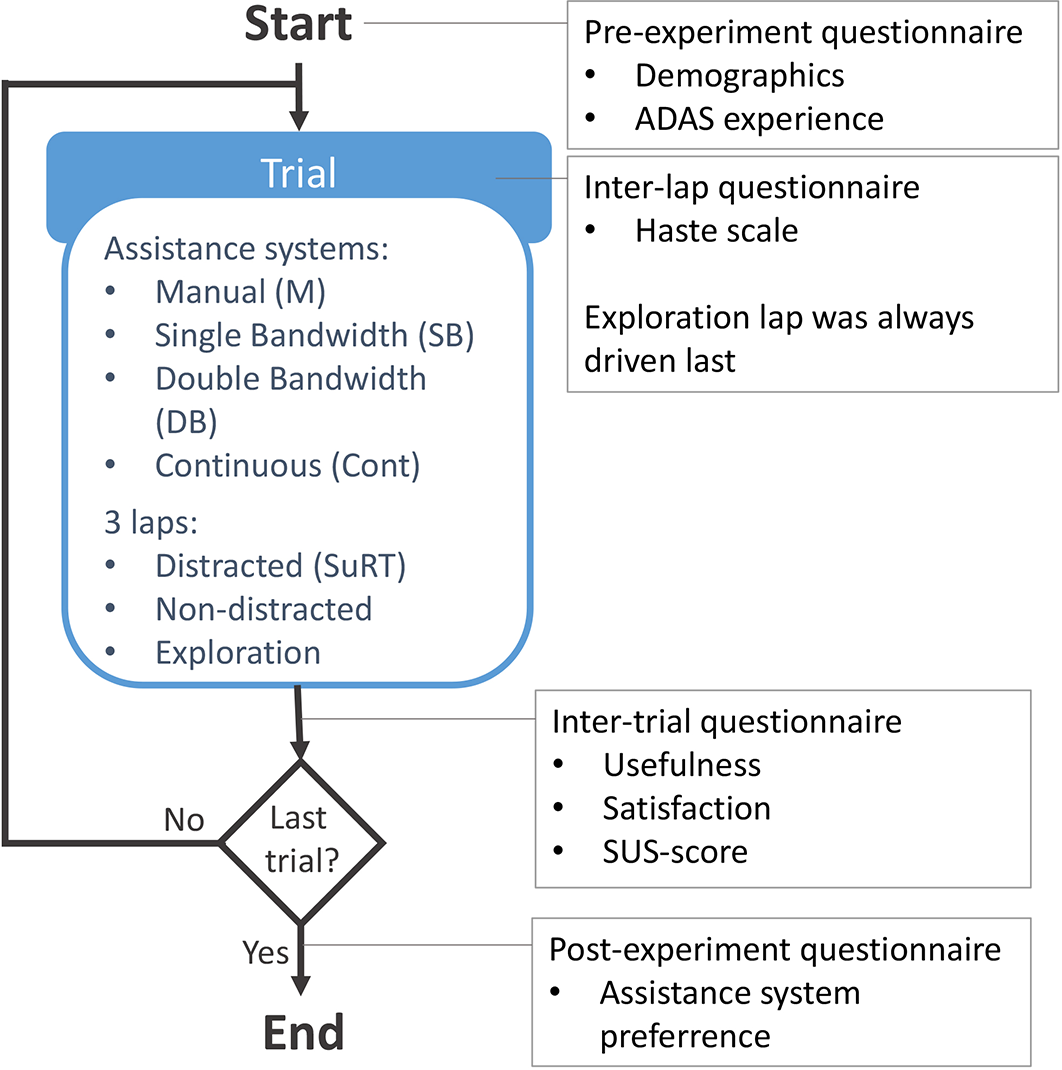
The experimental procedure. During the trials, participants would drive an assistance condition (i.e., M = manual; SB = single bandwidth; DB = double bandwidth; Cont = continuous). Per trial, participants would drive three laps (D = distracted; ND = nondistracted; Ex = exploration). On the right, it is indicated when during the experiment, questionnaires were conducted. ADAS = Advance Driver Assistance Systems; SUS-score = System Usability Scale-score; SuRT = Surrogate Reference Task.
Participants drove on the main track of the Hällered test track facility situated 60 km outside Gothenburg. The main track is a 6,300-m long, four-lane wide (lane width = 3.6 m), right-turned, oval (Figure 3). Trucks are allowed to drive on the inner two lanes only. Data logging started at the beginning of the first straight and ended at the end of the second straight (Figure 3). During the second curve, assistance was deactivated, and experimental conditions were prepared for the next lap of that trial. Participants drove with a fixed speed of 85 km/h using the truck’s adaptive cruise control.
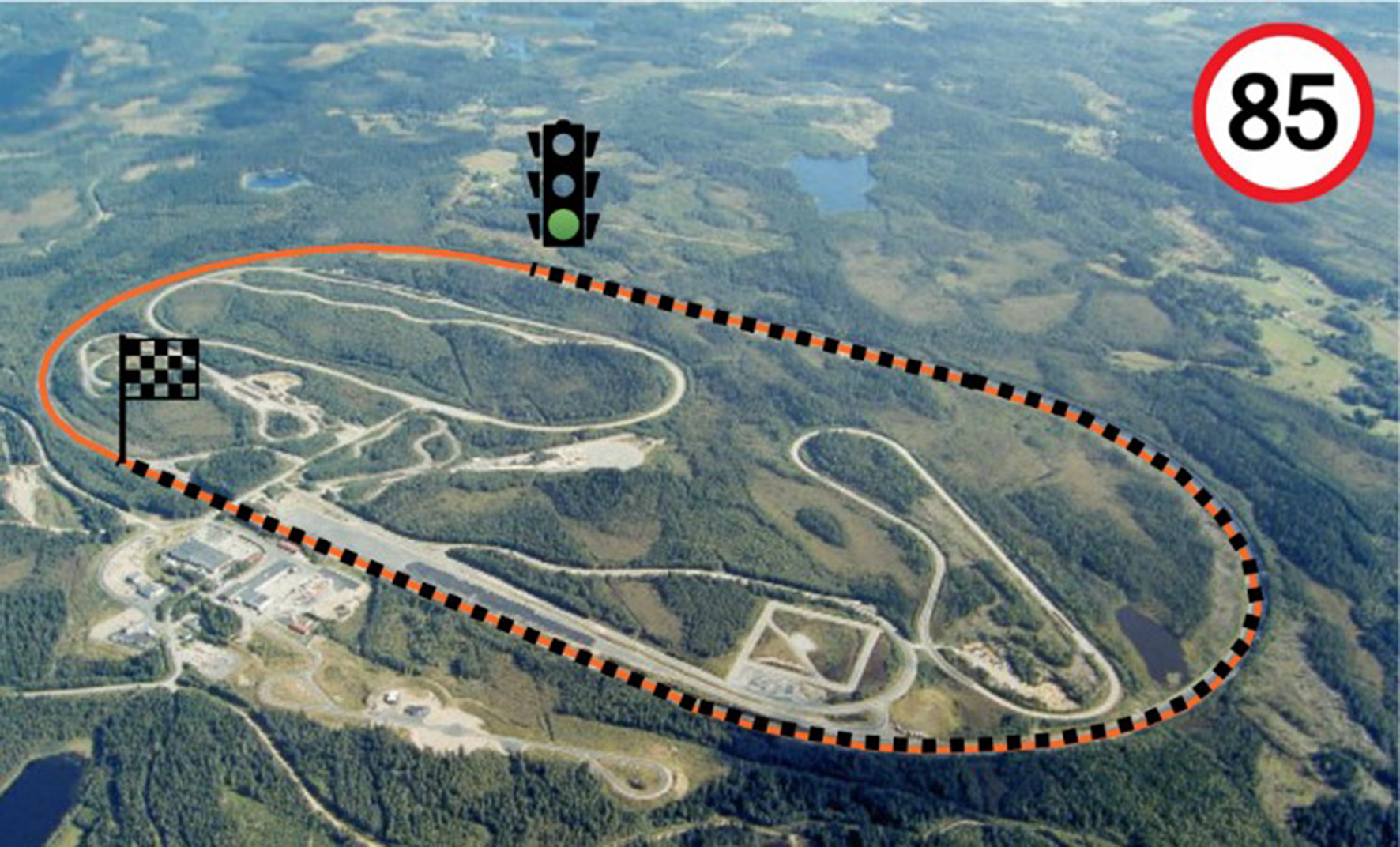
Hällered test facility. The dotted section indicates where data were logged. The traffic lights indicate the start and the checkered flag the end of the logging section.
Secondary Task
During one of the laps of each trial, the participants were asked to perform a self-paced task visual–manual task: Surrogate Reference Task (SuRT; ISO/TS 141198; International Standards Organization, 2012). The participant has to identify a circle (target) that is larger among other smaller circles (distractors) by selecting the correct column on the tablet. The task was displayed on a tablet placed to the right of the driver.
Procedure and Instructions
Participants were welcomed in a trackside office. They were asked to read and sign a written consent form, explaining that the purpose of the experiment’s study was to evaluate three settings of steering force on the steering wheel and that these systems were not intended for hands-off steering. Then, the participants completed the prequestionnaire regarding demographics and experience with truck driving and ADAS. Next, the participants were escorted to the truck, where the experimenter repeated the explanation of the driving tasks and safety rules on the test track.
During the lap without the secondary task, the participants were asked to drive as they would normally do, using adaptive cruise control. Drivers at Hällered are always responsible for prioritizing safety over experimental tasks. The participants were instructed to drive in the track’s second innermost lane. They were instructed to prioritize on-track safety by checking the surroundings of the vehicle for hazardous situations caused by other traffic. When a lane change toward the innermost lane (Lane 1) had to be made to overtake traffic, that specific experiment lap was repeated.
Upon entering the main track, participants were asked to set the adaptive cruise control to 85 km/h and safely proceed to Lane 2. At the beginning of the first and before the end of the second straight section, the experimenter activated or deactivated the appropriate assistance system, respectively. The experimenter used the subsequent curve to ask the participants to rate the overall driving performance on the HASTE scale (Östlund et al., 2004). They were asked to take into account the combined driving performance of the driver and the system. After each trial, the participants parked in a nearby parking area and filled out a system acceptance questionnaire (Van Der Laan et al., 1997) and a usability questionnaire (Brooke, 1996).
This process was repeated until the last lap of the trial, where the participants were allowed to explore the system’s capabilities near the lane boundaries. Participants were asked to comment on the activation time, assistance intensity, and overall feeling of the system’s correction. Finally, the participants completed a postexperiment questionnaire. The total experiment time was approximately 1 h and 45 min per participant. All experiments were conducted during daytime.
Dependent Measures
The measures were calculated per participant and assistance system for the first straight, the curve, and second straight, after which the three scores were averaged. The reason for aggregating curves and straights was that the curve was mild.
The lateral position is the current position of the vehicle center with respect to the lane center. Note that with the lane width of 3.6 m and a vehicle width of 2.5 m, the effective lateral safety margin is 0.55 m toward each lane boundary.
Mean lateral position (m) captures the bias of lateral position.
Mean absolute lateral position (m) describes the mean deviation from the lane center.
Standard deviation of the lateral position (m) describes the amount of variability around the mean lateral position and can be interpreted as swerving.
Number of lane departures (#) describes how many times the truck departed the lane.
Standard deviation steering wheel angle (deg) indicates the driver’s control activity.
Steering wheel reversal rate (reversals/min) is calculated by the number of reversals per minute. A reversal was defined when the difference between a local maximum and minimum was larger than 2°. This measure describes the smoothness of the driver’s control activity.
The HASTE-score, used in the HASTE project (Östlund et al., 2004), is a self-reported driving performance indicator on a scale from 1 (indicated as “very bad”) to 10 (indicated as “very good”).
SuRT. Mean response time and number of correct answers of the SuRT (Petzoldt et al., 2014). Lower response times and a higher number of correct answers were assumed to be indicative of a higher driver devotion to the secondary task.
A system acceptance questionnaire (Van Der Laan et al., 1997) was used to measure the usefulness and satisfaction of the three assistance conditions.
System Usability Scale questionnaire, consisting of seven items on a five-point Likert scale (Brooke, 1996). A study conducted by Bangor et al. (2009) concluded that a score of at least 70 corresponds to a usable system.
The postexperiment questionnaire asked the drivers to rank the three assistance systems. The first rank scored 2 points, second rank 1 point, and third rank 0 point. The preference score of an assistance system was the sum of the scores.
Analysis
For each dependent measure, a matrix (i.e., 15 participants × 4 systems) was created for the distracted and nondistracted condition. A two-way repeated-measures analysis of variance (ANOVA), with the systems and distraction conditions as within-subject factors, was conducted. For the measures that were not tested across two conditions (e.g., SuRT or SUS-score), a one-way repeated-measures ANOVA with only the systems as a within-subject factor was performed. Additionally, post hoc pairwise comparisons using a Tukey honest significant difference criterion were conducted.
Results
Distribution of Lateral Position
The distribution of the lateral position during the straight sections is shown in Figure 4 for all three assistance systems and manual control during nondistracted (top panel) and visually distracted driving (bottom panel). On average, the participants had a bias of about 20 cm toward the right side of the lane center. Lane boundary crossings happened more often on the right side than on the left side. Note that nondistracted drivers yielded a narrower distribution for each assistance system compared to distracted driving. Furthermore, all assistance systems showed a decrease in lateral positions outside the lane boundaries, compared to manual driving. All participants activated the SB and DB systems at least once during their trials.
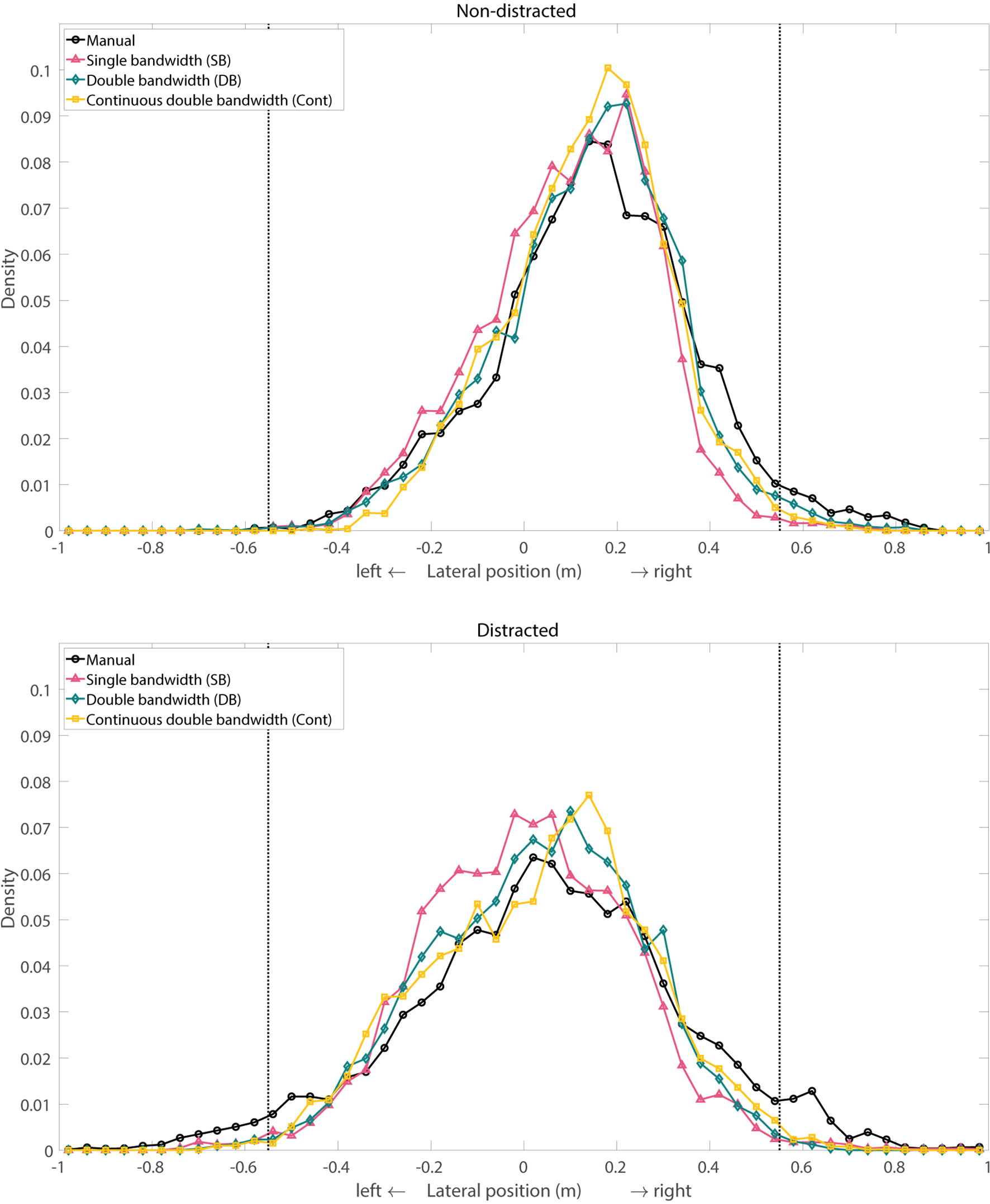
Distribution of the lateral position (m) of all participants per condition for nondistracted (top) and distracted (bottom) drivers on the two straights and the curve. The truck’s safety margins (0.55 m) to the lane boundaries are indicated by the vertical dotted lines. Bins are 0.04-m wide. The distributions are normalized so that the sum of the data points per assistance condition equals 1.
Driving Behavior
Table 1 shows the means and standard deviations of the dependent measures across participants, as well as the results from the repeated-measures ANOVA and pairwise comparisons. Figure 5 shows box plots and confidence intervals of the mean lateral position, standard deviation of the lateral position, and the mean number of lane departures, for distracted and nondistracted drivers.
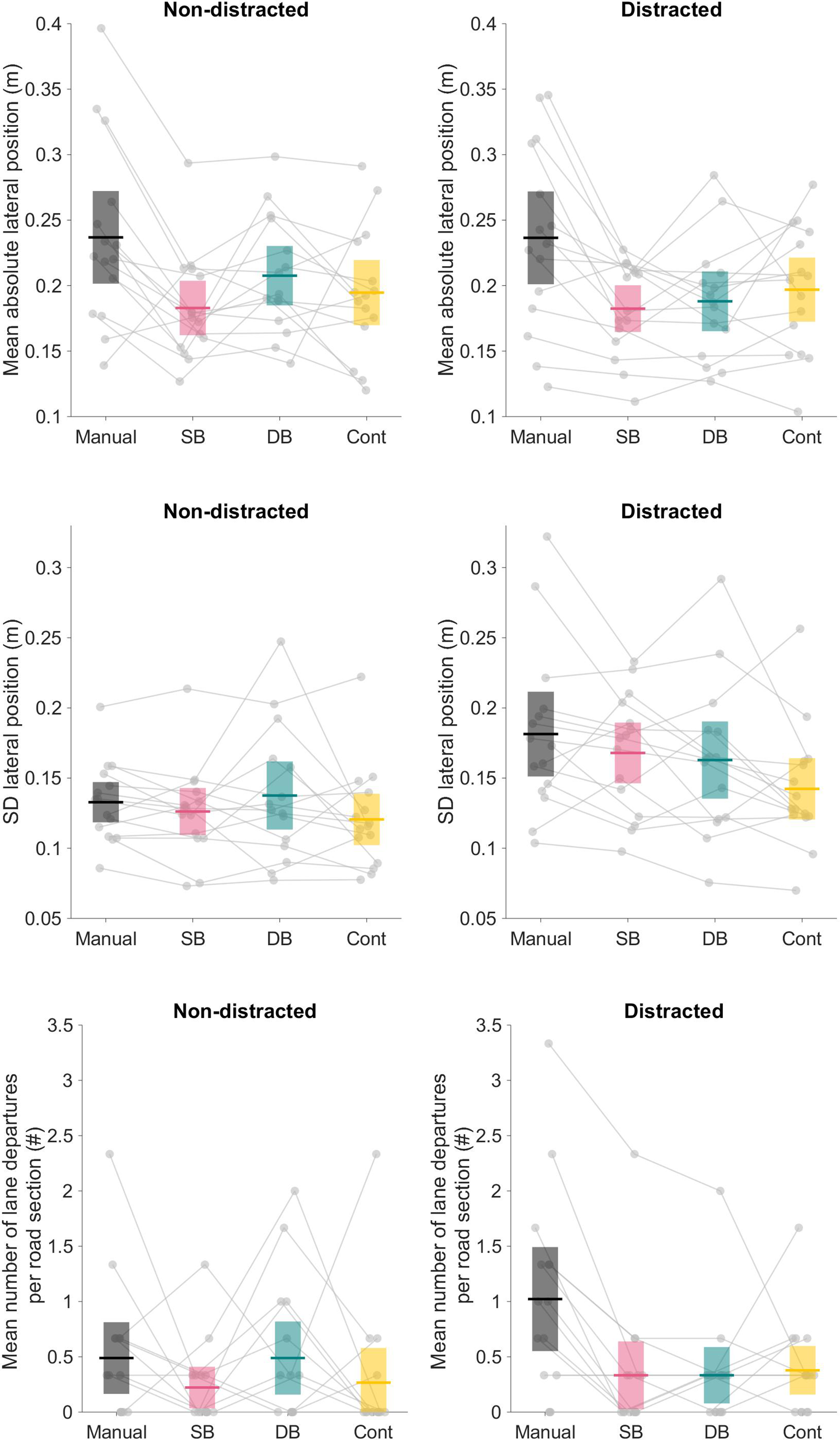
Box plots of the mean absolute lateral position (top), standard deviation (SD) of the lateral position (middle), and the mean number of lane departures (bottom) per assistance system in the nondistracted (left) and distracted (right) conditions. The shaded area indicates the upper and lower limits of the 95% confidence interval of the mean. The horizontal line indicates the median of the data points. SB = single bandwidth; DB = double bandwidth; Cont = continuous.
Means and Standard Deviation of Dependent Measures in the Distracted and Nondistracted Conditions
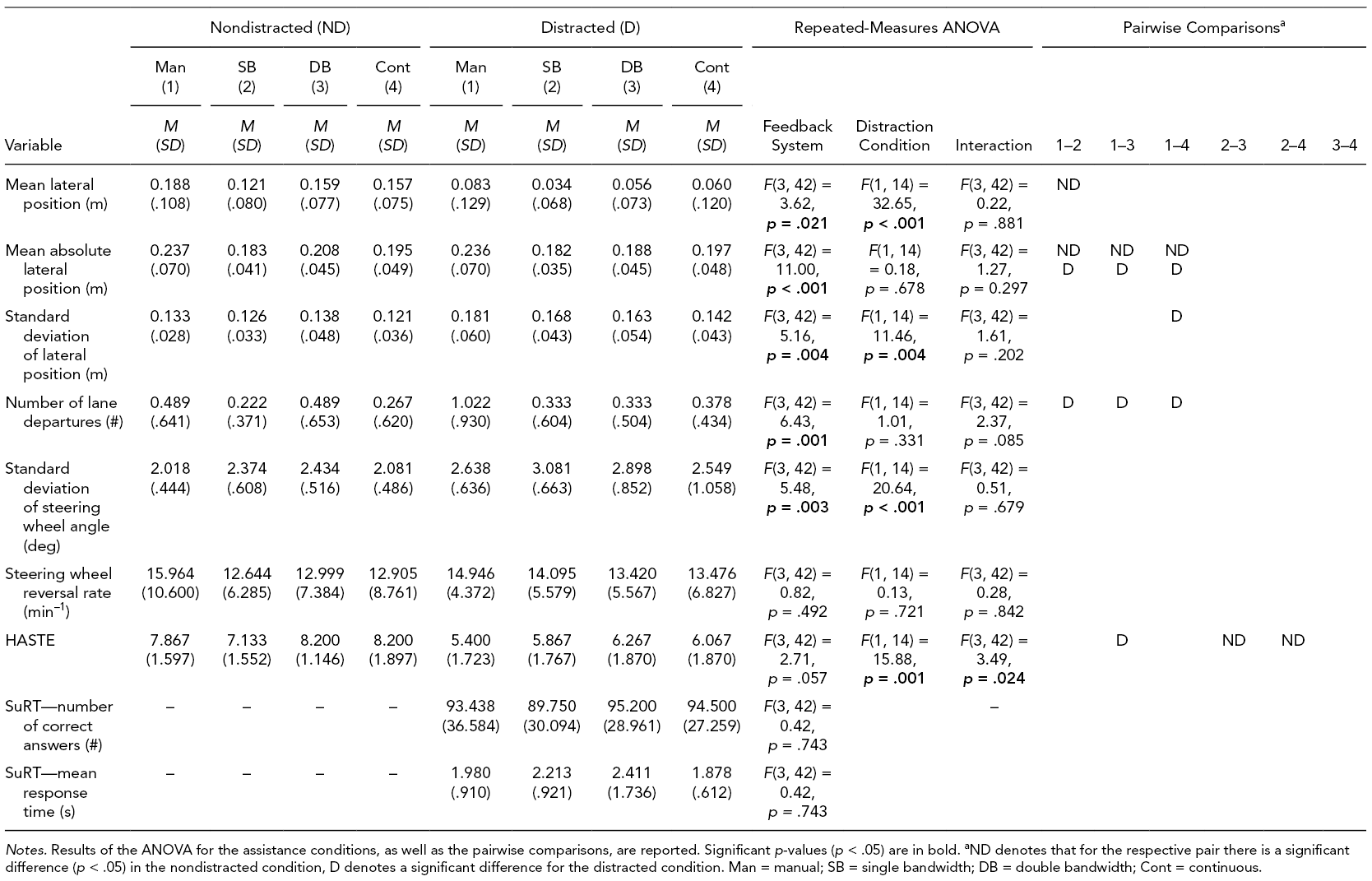
Notes. Results of the ANOVA for the assistance conditions, as well as the pairwise comparisons, are reported. Significant p-values (p < .05) are in bold. aND denotes that for the respective pair there is a significant difference (p < .05) in the nondistracted condition, D denotes a significant difference for the distracted condition. Man = manual; SB = single bandwidth; DB = double bandwidth; Cont = continuous.
When drivers were distracted, all three assistance systems yielded a significantly decreased mean absolute lateral position and a lower number of lane departures compared to manual driving. For nondistracted drivers, all assistance systems decreased the mean absolute lateral position compared to manual driving, but not the number of lane departures. SuRT-scores did not yield any significant differences between assistance systems.
Subjective Measures
Table 2 shows the satisfaction, usefulness, and usability ratings for the three assistance systems. Figure 6 shows the system usability questionnaire (left) and the usefulness and satisfaction scores of the system acceptance questionnaire (right). For the usefulness scale of the acceptance questionnaire, there was no difference between the three assistance systems; all were rated positively. The SB condition received a negative satisfaction score, significantly different from the positive scores for DB and Cont assistance systems. The ANOVA showed a significant effect for satisfaction and usability, F(2, 28) = 8.57, p = .001; F(2, 28) = 4.91, p = .015, respectively. Pairwise comparisons showed significantly higher ratings for Cont and DB compared to SB for satisfaction (p = .016, p = .001) and usability (p = .048, p = .019), respectively.
Mean and Standard Deviation of Subjective Measures
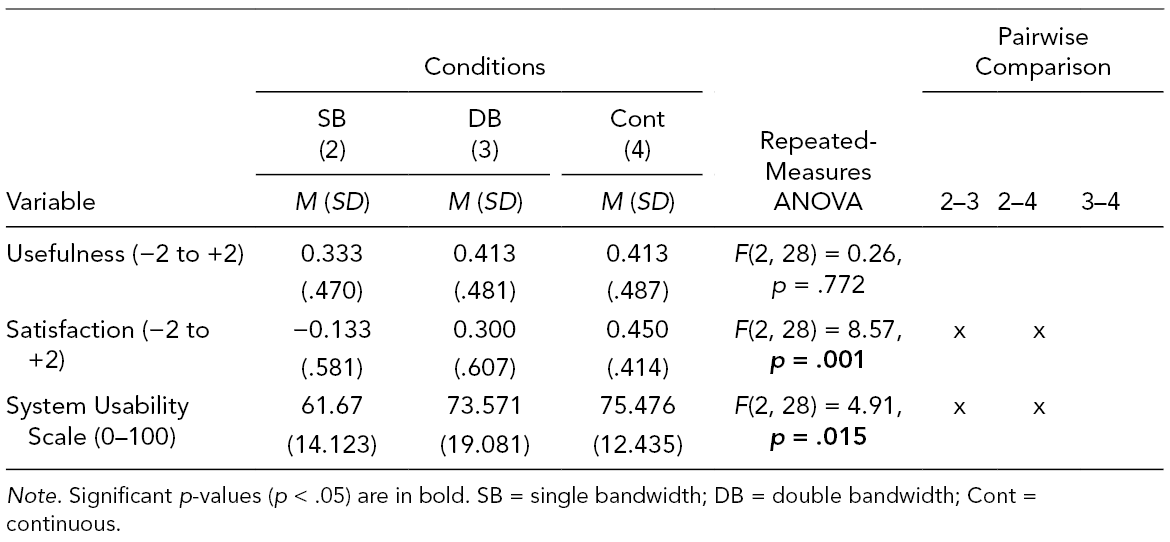
Note. Significant p-values (p < .05) are in bold. SB = single bandwidth; DB = double bandwidth; Cont = continuous.
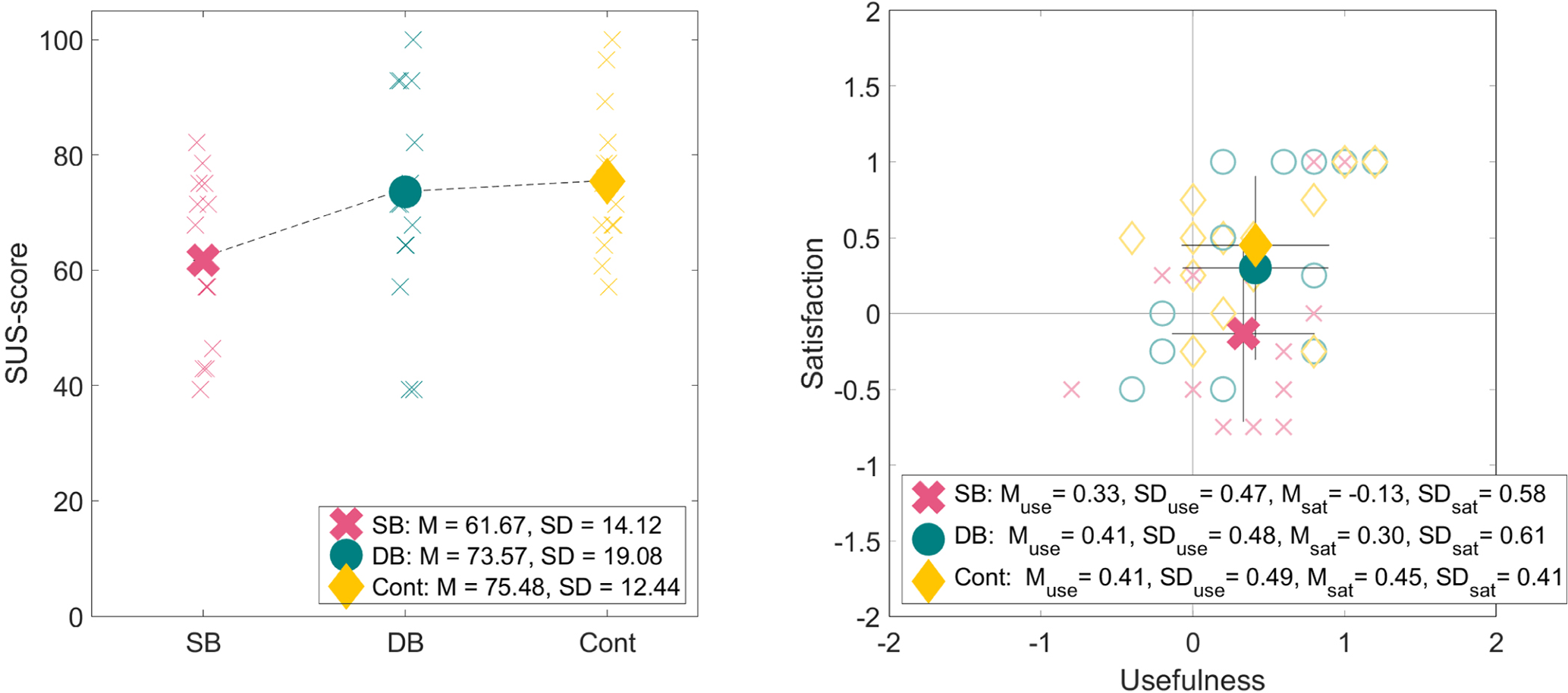
Left: System Usability Scale-score (SUS-score) per system. Crosses show individual participant ratings, and the circle represents the mean of participants. Right: Satisfaction and usefulness ratings. Unfilled markers show individual participant scores, and solid markers show the means of participants. SB = single bandwidth; DB = double bandwidth; Cont = continuous; M = mean; SD = standard deviation.
The ANOVA revealed a significantly, F(1, 14) = 15.88, p = .001, respectively, lower HASTE rating for distracted driving (mean = 5.90) compared to nondistracted driving (mean = 7.85). Postwise comparison revealed that SB yielded a significantly lower HASTE-score compared to DB (p = .007) and Cont (p = .007) for the nondistracted condition. For the distracted condition, Manual scored significantly lower than DB (p = .049). The postexperiment questionnaire showed a preference for Cont assistance, with total preference scores of 19, 16, and 10 for Cont, DB, and SB, respectively (Table 3).
Left: The Number of Participants That Placed the Assistance System on the First, Second, or Third Place and the Respective Preference Scores; Right: Number of Participants to Comment Positively, Neutral, or Negatively Regarding the Assistive Torques on the Steering Wheel
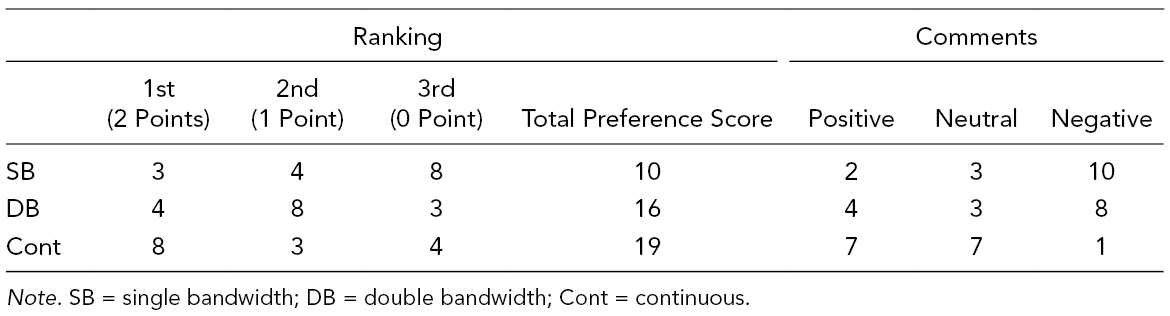
Note. SB = single bandwidth; DB = double bandwidth; Cont = continuous.
During the last lap, participants were asked to comment on the assistance system. The SB system yielded the most participants with negative comments (10), whereas the Cont system yielded the most positive comments (7). A subsequent analysis revealed that seven (Cont), six (DB), and four (SB) participants commented that they did not like the assistance system–preferred lateral position in the lane.
Discussion
This study evaluated three haptic lane-keeping assistance systems implanted in trucks on a test track.
Benefits and Limitations in Lane-Keeping Performance
For nondistracted drivers, all three assistance systems caused participants to drive more closely to the lane center as compared to manual control. For the other measures, the three types of haptic lane-keeping assistance did not substantially impact driving behavior. This finding is in contrast with driving simulator experiments that evaluated similar haptic assistance systems for nondistracted drivers (e.g., Flemisch et al., 2008; Mulder, et al., 2012). This disparity with the literature might be due to multiple factors. First, system design parameters, such as torque amplitude, were not identical between studies. Second, differences between a car and a truck (e.g., vehicle width, vehicle dynamics, and driver position) could affect the effectiveness of the assistance system. Third, participants in our study were experienced truck drivers, whereas many previous studies (e.g., Blaschke et al., 2009; Griffiths & Gillespie, 2005; Mars et al., 2014; Mohebbi et al., 2009; Mulder, et al., 2012; Petermeijer, Abbink, & de Winter, 2015) typically recruited regular or inexperienced drivers. Finally, there is known to be a difference between simulator-based driving and on-road driving; a literature review by Blana (1996) indicated that drivers have a higher standard deviation of the lane position and steer at higher frequencies in simulators as compared to real-world driving.
For visually distracted drivers, all three designs had a positive impact on driver behavior compared to manual driving, most notably in terms of a decreased absolute lateral position and a reduction in the number of lane departures. This finding corresponds to a simulator study by Petermeijer, Abbink, and de Winter (2015), comparing bandwidth and continuous assistance while drivers performed a peripheral detection task. The results of Petermeijer, Abbink, and de Winter (2015) also revealed differences between assistance systems, where continuous assistance yielded a reduced absolute and reduced standard deviation of the lateral position, as well as a reduced steering velocity compared to bandwidth assistance. A potential explanation for the relatively small differences between continuous and bandwidth assistance in the present study could lie in the differences in the type of test (i.e., simulator vs. real life) and the type of vehicle (car vs. truck). It seems that a simulator environment can capture the subtle effects of the assistance system’s design, and that those effects become less pronounced in (less-controlled) real-life tests. Furthermore, trucks have smaller safety margins than cars, so it is possible that the improvement in lateral deviation is subject to a ceiling effect. In order to reveal the subtle differences between the effects of continuous and bandwidth assistance on driver behavior, future studies should perform detailed analyses of safety margins (e.g., time-to-lane crossing), control effort (e.g., driver steering torque), conflicts (e.g., opposing steering torques), and distraction (e.g., gaze behavior).
Acceptance Ratings
Acceptance is a major contributor to system disuse (Parasuraman & Riley, 1997). An assistance system may be effective, but if it is annoying, drivers might disuse it, which negates any safety benefits the system might provide.
Participants acknowledged the usefulness of all three systems, which is corroborated by the results regarding lateral position. The visual task in our study was more distracting compared to the task in Petermeijer, Abbink, and de Winter (2015), which could explain why all assistance systems were rated positively on the usefulness-scale; that is, all systems effectively reduced lane departures. For example, one driver commented that the “secondary task is scary” when driving without assistance. Participants acknowledged the usefulness of the system in their comments. For example, the SB system gave a driver a “remind me to keep the eyes on the road feeling,” the Cont system “felt safe,” and the DB system was “performing really well.” It should be noted that higher perceived safety alone is not sufficient and that system designers should strive for calibrated trust in the system (Lee & See, 2004), where the driver’s trust matches the system’s capabilities. Future studies should investigate how long-term use of haptic assistance systems affect trust and perceived safety.
Based on the satisfaction scores, our participants, on average, did not like the SB assistance as much as the DB and Cont assistance. Petermeijer, Abbink, and de Winter (2015) also found lower satisfaction ratings for the SB assistance compared to the continuous system. The low satisfaction score of SB assistance could be due to the sudden onset of torque pulses exerted on the steering wheel when the system activated (i.e., exceeding the lateral threshold). It could be that the SB system was interpreted as a lane departure warning, instead of assistive torques, and might have been perceived as false alarms (i.e., too early). Nonetheless, torque pulses are probably more easily distinguished from naturally occurring torques on the steering wheel (e.g., self-centering torques or vibrations caused by a road crown) and communicate the system limits unambiguously, compared to the torques of the continuous system.
Although continuous assistance scored yielded subjective ratings compared to SB, some participants commented on the Cont assistance not accommodating the slight offset from the lane center, which truck drivers generally adopt (Bunker & Parajuli, 2006). This observation corresponds to findings in the literature on continuous lane-keeping assistance (Griffiths & Gillespie, 2005; Mulder & Abbink, 2011), which suggests further research is needed toward systems that allow for personal preferences. For prolonged driving, a discrepancy between the driver’s and system’s preferred trajectory would probably lead to dissatisfaction and possibly the deactivation of the system.
Different designs for haptic lane-keeping assistance have been shown to provide benefits to drivers (Jermakian, 2012; Nodine et al., 2011), but there is little consensus on the impact of design varieties, such as the design options studied herein. We recommend exploring the effectiveness of adaptive (i.e., a system that adapts automatically to the traffic scenario or the driver) and adaptable (i.e., driver-initiated adaptations in the system) haptic lane-keeping assistance systems.
In future vehicles, haptic shared control systems can be used in SAE level 2 automation (Society of Automotive Engineers, 2016) to keep the driver engaged in the “object and event detection and response task” that they are required to perform. Moreover, haptic shared control can facilitate transitions between SAE level 3 and higher (hands-off) to manual and vice versa. Several recent studies have used elaborate assistance approaches that combine continuous and bandwidth systems (Bian et al., 2019; Merah et al., 2016) or switch between discrete levels of automation from manual driving to autonomous driving (Chen et al., 2019).
Limitations
The duration of the driving time during the trials was relatively short, especially compared to the hours truck drivers usually spend on the road. Long-term driving might elicit automation issues, such as overreliance, skill degradation, or after-effects (Bainbridge, 1983; De Winter & Dodou, 2011). It is possible that when drivers are using the system for longer times, acceptance ratings might drop, as the majority of the participants commented that they did not like the system’s preferred lateral position.
Likert scales and rankings provide only little insight into why drivers (dis)like a particular assistance system. Structured interview studies should be performed to gain knowledge on which system characteristics affect a driver’s subjective experience.
A higher number of participants would probably have allowed us to make more conclusive statistical claims about the results and to reveal subtler effects between the assistance systems. Future studies should also include other subjective measures such as time-to-lane-crossing, conflict torques between driver and system, and a structured analysis of participant comments.
Conclusion
Three haptic lane-keeping assistance systems were implemented in trucks and evaluated on a test track with and without visual distraction. All three systems yielded similar performance benefits for distracted drivers, whereas the benefits for nondistracted drivers were limited. Similar to previous driving simulator studies, continuous assistance received higher subjective ratings than bandwidth assistance. However, continuous assistance did not show the increased effectiveness (in terms of lateral position) that was found in previous simulator studies. This study adds to the growing body of research on how to design lane-keeping assistance systems that provide effective assistance, are well accepted, and keep drivers sufficiently engaged so they can respond to unexpected events.
Key Points
Haptic steering wheel assistance improves lane keeping in truck driving.
Haptic steering assistance reduces lane departures for distracted truck drivers.
Continuous assistance is better liked than bandwidth assistance.
Footnotes
Acknowledgments
This work was conducted at Volvo Group Trucks Technology in collaboration with the Delft University of Technology. This study was performed within the FFI project “HARMONISE: Safe interaction with different levels of automation” (Daybook no D2016-04263), cofunded by Volvo Group Trucks Technology (GTT) and Vinnova Sweden’s Innovation Agency. TU Delft efforts were supported by VIDI grant 14127, funded by TTW, part of the Dutch National Science Foundation.
Author Biographies
Jeroen Roozendaal received his MSc degree in vehicle engineering from Delft University of Technology, Delft, The Netherlands, in December 2017. He is currently working as a test and development engineer at Volvo Cars Cooperation, Gothenburg, Autonomous Drive. Within this group, he develops active safety systems for the highly automated vehicle.
Emma Johansson is a human factors and automation specialist with an MSc in cognitive science from Linköping University. Her background is in accident, inattention, and automation research and currently works with research and system development in the Vehicle Automation department at Volvo Group Trucks Technology.
Joost de Winter is a human factors scientist with interest in automated driving. He is an associate professor in the Department of Cognitive Robotics of the Delft University of Technology.
David Abbink is currently a full professor at the Delft Haptics Lab at the faculty of Mechanical, Maritime and Materials Engineering in Delft University of Technology. His research interests include haptics, shared control, driver support systems, operator modeling, and system identification.
Sebastiaan Petermeijer is a postdoctoral researcher at the section Human-Robot Interaction at the Department of Cognitive Robotics of the Delft University of Technology. He is a human factors expert with a particular focus on the design and evaluation of multimodal human–machine interfaces in automated vehicles.