
Abstract
A standoff methane (CH4) sensor with actual hard topographic targets (usually called non-cooperative targets) is essential for natural gas pipeline leakage inspection and many other practical applications. To address this requirement, a miniaturized and low-power-consumption gas sensor was developed based on tunable diode laser absorption spectroscopy for standoff CH4 detection with a non-cooperative target. Wavelength modulation spectroscopy with a 1f normalized 2f detection method was employed for calibration-free CH4 measurement. A Kalman filter algorithm was used to improve the precision of the detection. The performance of the standoff CH4 sensor was evaluated comprehensively under various conditions, including different incident angles, different hard topographic targets, and different standoff distances. The results show that the measurement precision is 0.107% and the sensitivity is 4.08 parts per million per meter (ppm·m) with a time resolution of 1 s and a standoff distance of 40 m. The detection limit can achieve 1.24 ppm·m at an optimal integration time of 70 s. This sensor can be easily integrated into mobile platforms, which lays the foundation for intelligent leak inspection.
This is a visual representation of the abstract.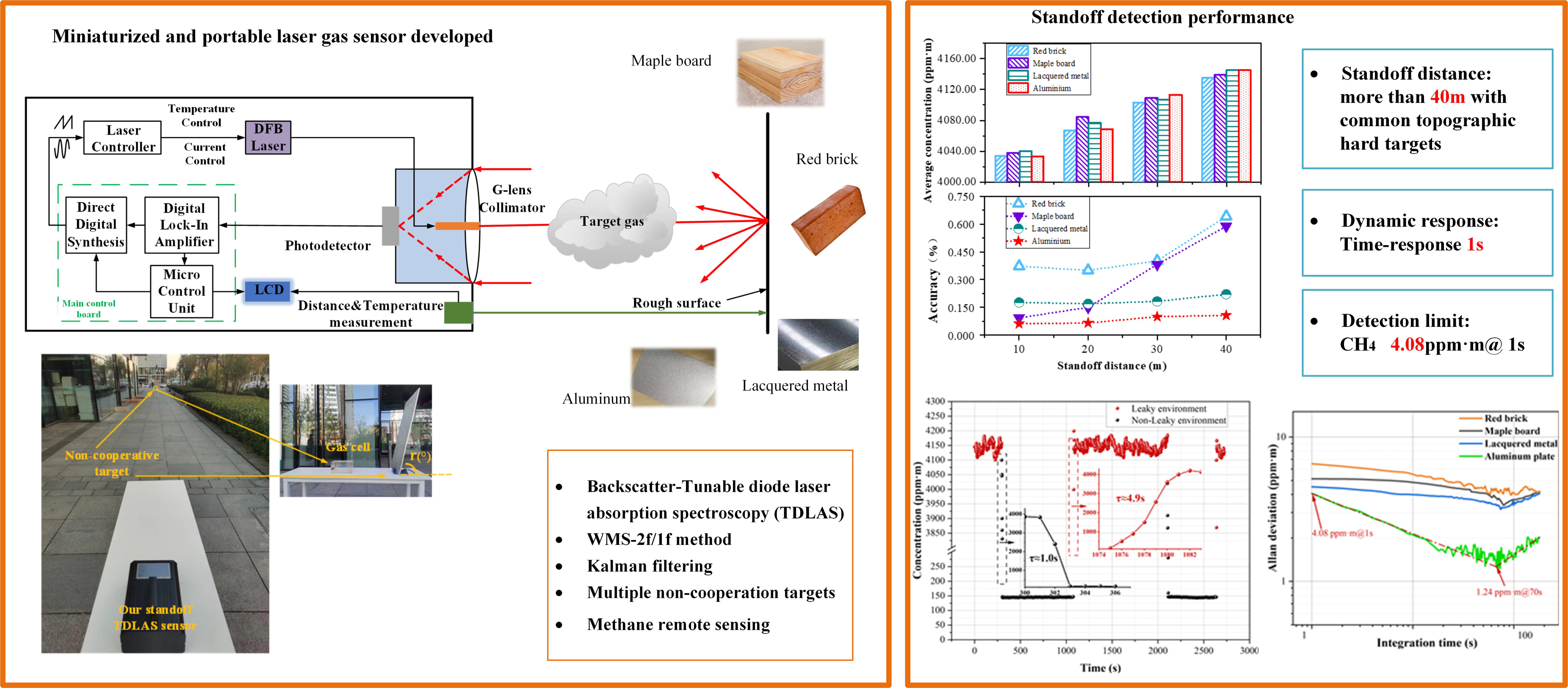
Keywords
Introduction
Natural gas, consisting of over 85% methane (CH4), is currently one of the most common clean energy sources in industrial production and daily life. It serves not only as a chemical feedstock, but also for power generation, urban gas, and other purposes. 1 Natural gas is mainly transported through pipelines due to their economic and safety advantages. 2 Huge natural gas pipelines have been built in almost all parts of the world. However, following that there is a risk of pipeline leakage during use due to corrosion of steel pipes, mechanical damage caused by construction, unsealing of connectors, and welding joint cracks caused by stress.3–5 Therefore, it is crucial to regularly check its technical condition for leakage detection. For the detection scenario of natural gas pipeline leakage inspection, tunable diode laser absorption spectroscopy (TDLAS) is one of the most attractive technologies,6–8 not only because it can provide high sensitivity, good selectivity, and fast response, but also because it can be used for standoff gas detection, where both the personnel and the detection system are at some distance from the object (e.g., natural gas pipelines) being measured. 9 These characteristics make TDLAS CH4 sensors particularly suitable for handheld or mobile platforms for efficient leak detection.
Standoff TDLAS CH4 sensors have always been a hot research topic. 10 In the last decade, special attention has been devoted to the research and development of real standoff sensing with noncooperators, i.e., the standoff detection system retrieves path-averaged gas concentrations by collecting the backscattered light from a distant hard topographic target rather than an optical reflector. Numerous studies have been performed to detect CH4 gas leaks using different standoff systems. Jaworski et al. 11 achieved CH4 detection from a distance of 10 m with a detection limit of 10 parts per million per meter (ppm·m). However, this system was not timely or accurate enough for weak leak detection in industrial environments. To improve the standoff distance and reduce the detection limit, Li et al. 12 developed a CH4 standoff sensor with an adjustable focus lens for collimation in the near-infrared (NIR) band. This system achieved a minimum detection limit of 1.473 parts per million per meter (ppm·m) at a distance of 50 m. However, the detection system requires the master controller to continuously adjust the focus of the collimation convergence, making it unsuitable for use in conjunction with a fast-moving inspection. Mid-infrared (MIR) region covers the fundamental absorption bands of CH4 gas, allowing for high detection sensitivity. Strahl et al. 13 combined a MIR laser with MIR imaging to detect and locate CH4 leaks effectively. This system detected leaks at a rate of 2 mL/min at a distance of 2 m with a frame rate of 125 Hz. The MIR system provides a promising solution for pipeline leak detection and localization. However, its high power consumption, high cost, and short detection distance limit its practical application. Liang 14 conducted a laboratory study on the dynamic effects of incident light angle on the performance in a non-cooperative standoff sensor by using white paper and walls as reflectors. However, the evaluation of the sensor performance was not comprehensive enough. Iwaszenko et al. 15 investigated large-scale CH4 detection using an unmanned airborne TDLAS sensor, which showed that the flight altitude to ensure good detection accuracy is within the range of 4–15 m due to the performance of the TDLAS sensor. However, for practical unmanned aerial vehicle-based leak detection applications, a standoff distance of more than 40 m is desired to avoid the influence of common obstacles such as trees or buildings.
To summarize, the current laser standoff sensors’ performance in terms of standoff distance, detection limit, and accuracy requires further improvement. This paper proposes a non-cooperative target-based CH4 standoff system that utilizes a NIR distributed feedback (DFB) laser as the light source. The wavelength modulation spectroscopy (WMS) primary harmonic normalized second harmonic (with a 1f normalized 2f detection WMS-2f/1f) method and a Kalman filtering algorithm were employed to ensure accurate measurement of long-range concentrations while minimizing interference from light intensity and noise. The impact of the incident angle is also considered in evaluating the detection performance of the standoff sensor under different reflector conditions and distances.
Theoretical Basis
Selection of Laser Wavelength and Analysis of Return Power
The NIR band is a superior choice for miniaturized standoff CH4 sensor development and application, because of the rugged and easy-to-align fiber-coupled DFB laser diode, the low-cost optical components commercially available in optical communication, and the field-tested durability. Figure S1 (Supplemental Material) displays the absorption spectrum of CH4 in the range of 6045 to 6049 cm–1, according to the HITRAN database, 16 with a background gas composition of 500 ppm CO2, 1% H2O and 1.8 ppm CH4, at T = 300 K, P = 1 atm, and L = 80 m. Analysis of the simulation results reveals a prominent absorption peak of CH4 at 6046.95 cm–1, with no significant interference in its vicinity. Hence, the absorption spectrum of CH4 at 1653.73 nm (6046.95 cm–1) was chosen as the center spectral line of the laser.
In practical detection, the strength of the backscattered light signal reflected from non-cooperative targets is one of the most important factors affecting detection performance. Under normal atmospheric conditions, the reflected and extinction components generated by atmospheric aerosols can be negligible. The return laser power P received by the photodetector is mainly contributed by the backscattered light reflected from non-cooperative targets.
17

Based on the simulation results, it is evident that the optical power received by the photodetector from reflectors made of different materials gradually decreases with an increase in standoff distance and a decrease in the reflectivity of non-cooperative targets. When the distance is 40 m, the power of the echo received from the actual terrain target ranges from 0.1 to 10 nW. These power levels are sufficient to meet the demands of TDLAS non-cooperative target standoff detection over long distances.
Wavelength Modulation Spectroscopy with a 1f Normalized 2f Detection (WMS-2f/1f) Method
Wavelength modulation spectroscopy (WMS) is a widely used method in TDLAS technology for sensitive gas detection, as it effectively mitigates the impact of background noise and external interference. In WMS, the laser is tuned by a low-frequency sawtooth wave to scan the target wavelength range of gas absorption, while it is modulated simultaneously by a superimposed sinusoidal signal with a high frequency f. Therefore, this generates both frequency modulation (FM) and intensity modulation (IM), as described by Eqs. 2 and 3:



Kalman Filtering Algorithm
Kalman filtering algorithm has been utilized to enhance the detection accuracy of the system by filtering the concentration values detected by the standoff sensors in our previous work.
3
The filtering performance of the algorithm is influenced by four parameters: the initial filter value


Sensor System Design
System Setup
The overall design scheme of our standoff CH4 sensor is shown in Figure 1. A laboratory-made master control board featuring an integrated direct digital synthesis (DDS)-based signal generation module and a digital lock-in amplifier (DLIA) circuit was utilized. A 24-bit analog/digital converter was used in the DLIA to ensure sufficient sampling accuracy. A cascaded finite impulse response–infinite impulse response filter was employed, and the lock-in time constant was set to be 1 ms with a corresponding cutoff frequency of ∼160 Hz. The DDS outputs a low-frequency sawtooth signal (10 Hz) superimposed by a high-frequency sine wave modulation signal (2.56 kHz) to the laser driver board. A NIR DFB laser diode is controlled by a laser driving circuit to ensure it covers the CH4 absorption line at 1653.7 nm. After being collimated and converged, the laser passes through the measurement area and onto a hard non-cooperative target opposite at a certain distance away. The backscattering light was collected by a convex lens and was focused on a photodiode, which converted the optical signal into an electrical signal. The signal carrying the gas information was transmitted back to the DLIA and demodulated in the DLIA. The demodulated signal was fed into a microcontroller unit for data processing, and then the result was displayed on a touchable liquid crystal display panel. In addition, the system also integrated a temperature sensor and a distance sensor to measure the temperature and standoff distance of the measured environment in real time for calibration-free measurement of the CH4 gas concentration. The sensor is designed for handheld applications, with a size of 25 × 16 × 9.4 cm3 and a power consumption of <10 W.
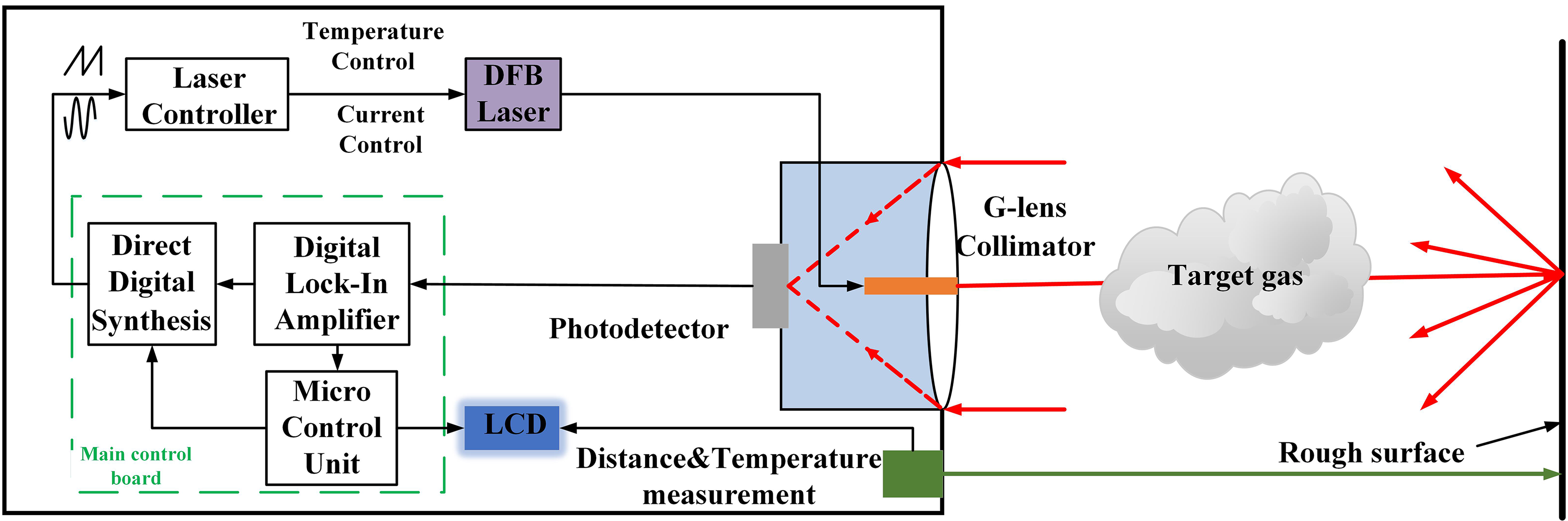
Schematic diagram of the standoff CH4 sensor.
Algorithm for Concentration Inversion
A concentration inversion algorithm was developed for the standoff CH4 sensor, as depicted in Figure 2. First, the original WMS-2f and WMS-1f signals are demodulated by the lock-in amplifier, and then they undergo noise suppression. Second, the real-time atmospheric pressure is derived by the WMS-1f or 2f signal, due to the relationship between line broadening and gas pressure. 18 The analytic expressions characterized by line broadening were established by the spacing between the peak and valley of the WMS-1f signal and the distance between two zero crossings of the WMS-2f signal, respectively. Next, the effect of pressure fluctuation on the measured gas concentration can be a corrected WMS-2f/1f simulated signal of CH4 is performed by means of the CH4 spectral parameters obtained from the HITRAN database, combining with the prior laser characteristics, modulation amplitude a, and temperature T. A least squares linear iterative fit of the simulated signal to the filtered measured signal is conducted to calculate the sum-of-squared error of the simulated and measured signals. This process returns an approximate concentration value, which is used for further iterative fitting until the final concentration is deemed converged. It is noteworthy that the least squares fitting consumes about a few tens of milliseconds and has a negligible effect on the temporal resolution of the measurements.
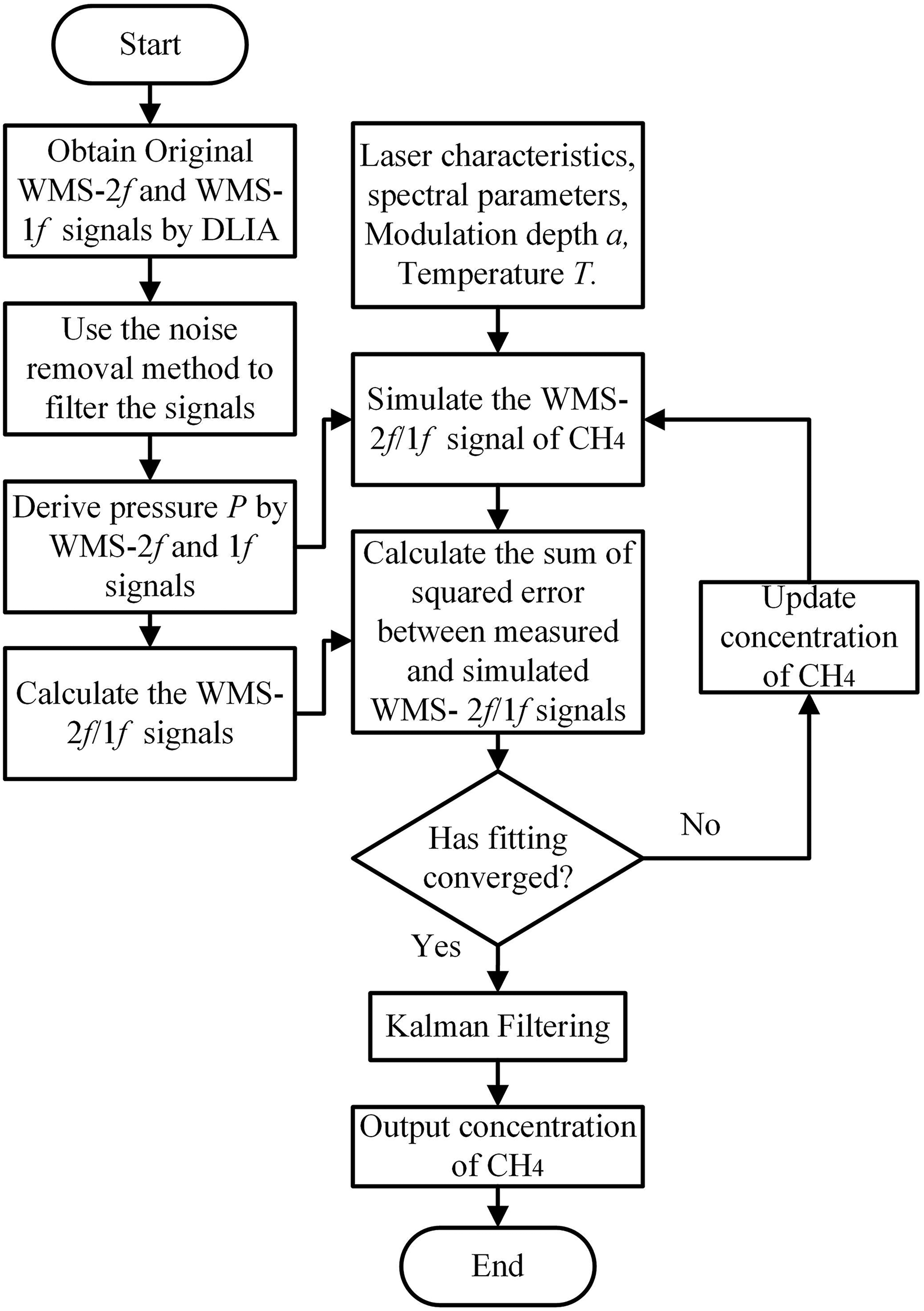
Flowchart of gas concentration inversion algorithm.
Results and Discussion
In order to evaluate the performance of the standoff CH4 sensor, a series of experiments were carried out outdoors on campus. As shown in Figure 3, the sensor was placed at a height of 110.0 cm above the ground, and an aluminum plate was placed at various distances and angles from the sensor. A transparent gas cell (100 × 100 × 200 mm3) with a calcium fluoride lens at both ends was placed in the remote sensing path to simulate the leaking gas mass within the detection path.
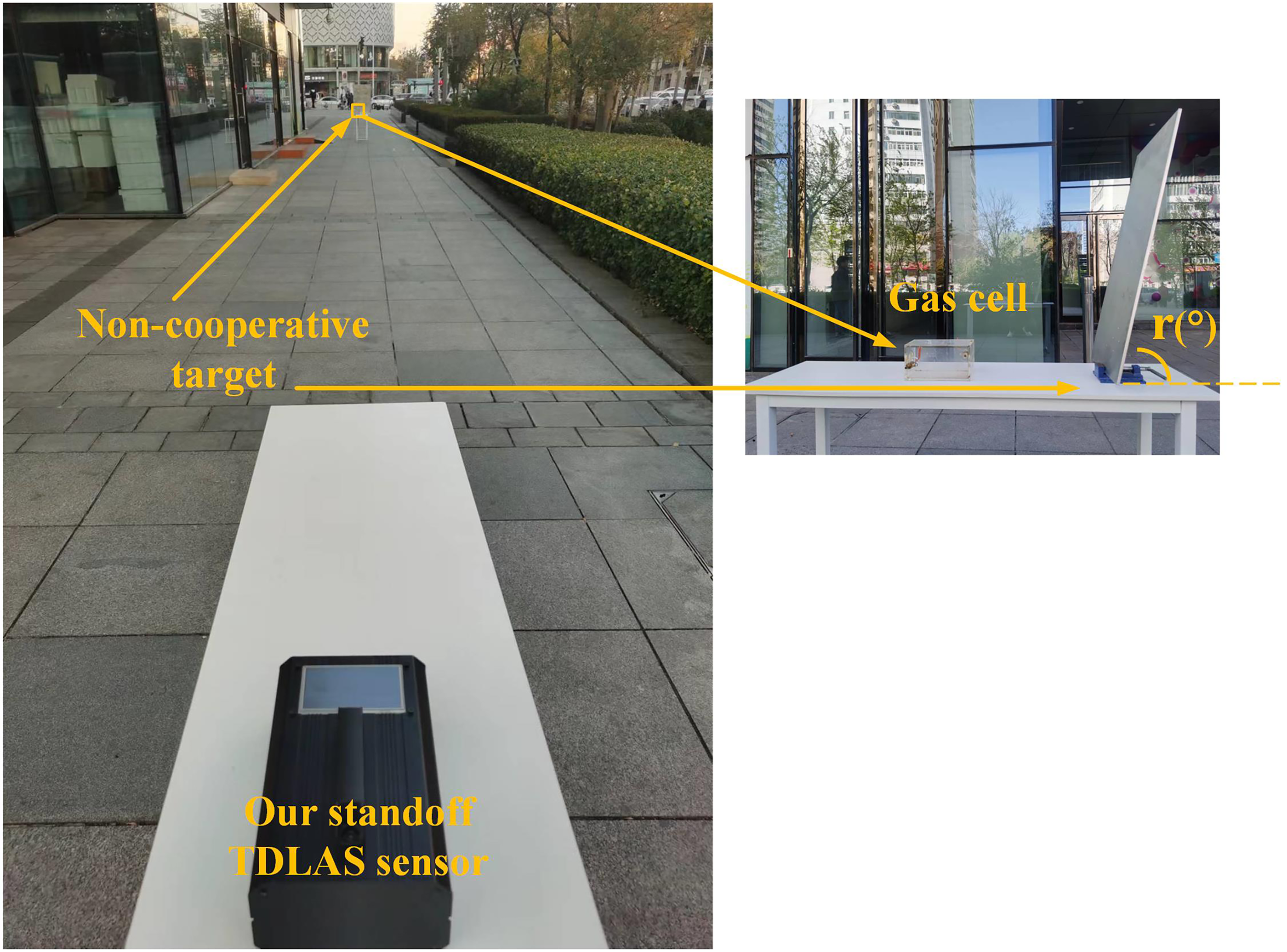
Experimental site diagram.
Different Incident Angles
The impact of different incident angles on the performance of the sensor is investigated at the standoff distance of 10 m, with an aluminum plate as the reflector. The WMS-2f/1f signal as detected by the sensor is shown in Figure 4a, and the average concentration over 1 min is shown in Figure 4b. The gas cell was filled with a CH4 gas of 10 000 ppm concentration. The theoretical concentration obtained by inversion is 4000 ppm·m. Since the concentration of CH4 in the air of the detection path is approximately 1.8 ppm, the expected measurement result for 10 m is 4036 ppm·m. At an incident angle r of 60° between the non-cooperative target reflector and the ground (as illustrated in Figure 3), most of the scattered echo signal is not received by the receiver due to the large angle. At r = 75°, the detector receives a good echo signal with a high signal-to-noise ratio (S/N), but the angle deflection causes the detection path to lengthen, leading to more absorption of the laser light by CH4 molecules in the air and an overall higher concentration inversion result. On the other hand, when r > 90°, the detection path becomes shorter, resulting in a low concentration inversion result. When r is around 90°, the concentration inversion is the most accurate and has the greatest practical value in real scenarios.
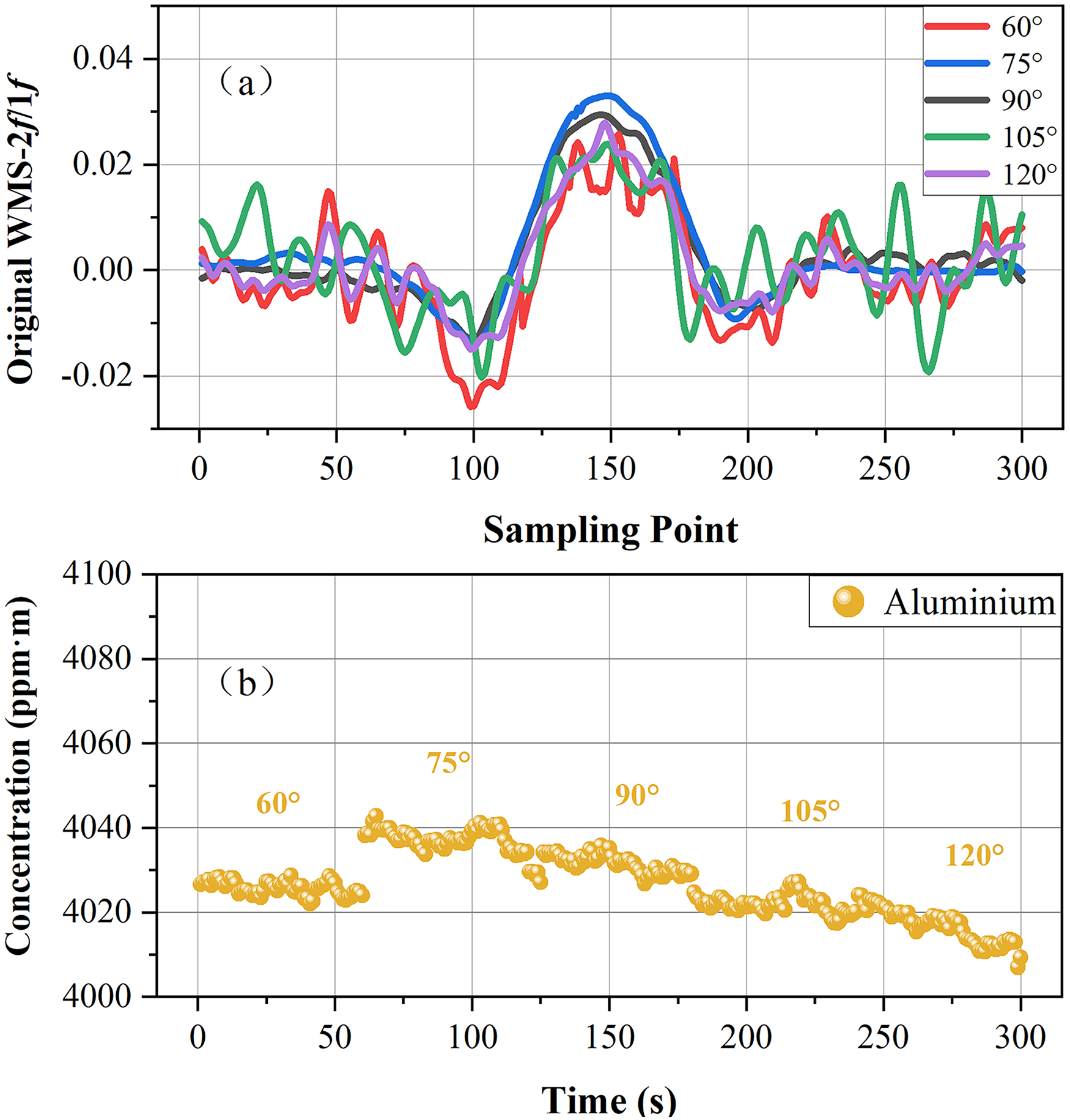
(a) CH4 WMS-2f/1f signal collected at various angles; (b) CH4 concentration collected at various angles.
Different Reflectors and Different Standoff Distances
The performance of the standoff CH4 sensor was also accessed for different reflectors at varying distances. The concentration data after Kalman filtering were collected at distances of 10 m, 20 m, 30 m, and 40 m from the standoff sensor using different reflectors, including aluminum, lacquered metal, maple board, and red brick. The results for each distance and each reflector were collected for a duration of 10 min and are presented in Figure 5.
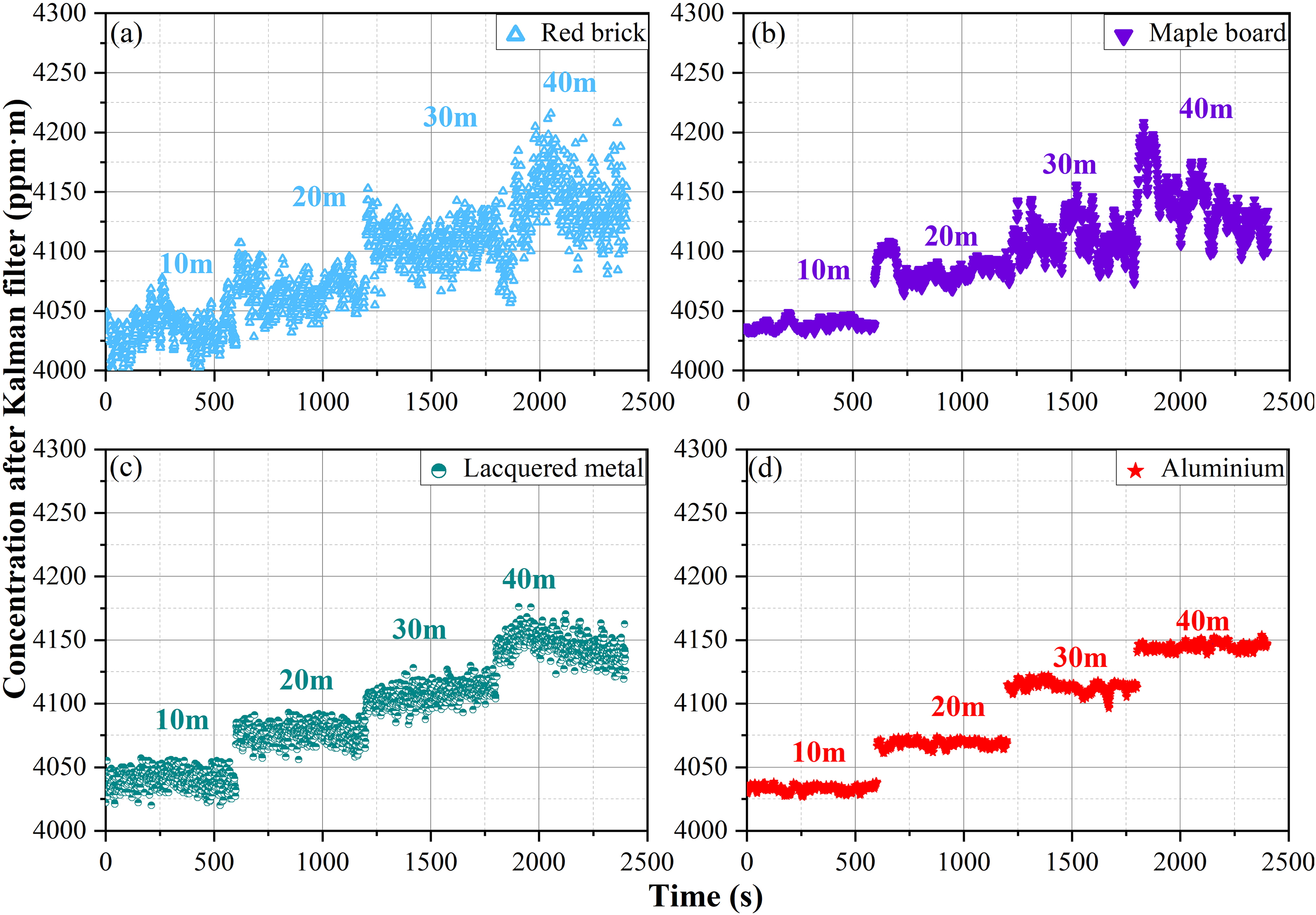
CH4 concentration collected at various distances and non-cooperative targets from (a) to (d): red brick, maple board, lacquered metal, and aluminum.
Based on the environment mentioned above, the theoretical measurements for distances of 20 m, 30 m, and 40 m were determined to be 4072 ppm·m, 4108 ppm·m, and 4144 ppm·m. To ensure the reliability of the results, the verification process was repeated multiple times, and the standard deviation between the mean value of each measured concentration and the theoretical value was recorded. According to Figure 6, the sensor has high accuracy (defined as the ratio between the standard deviation and the theoretical value) in detecting CH4 concentration within 20 m standoff distance and when the non-cooperative targets are the four reflectors mentioned above. However, as the distance increases, the reflectivity of maple board and red brick decreases, resulting in poorer detection accuracy of the sensor, while the overall detection performance of lacquered metal and aluminum is more average within 40 m standoff distance. Furthermore, when the reflector is an aluminum plate, the measurement results were the most stable and accurate, with an accuracy of 0.107% at a distance of 40 m.
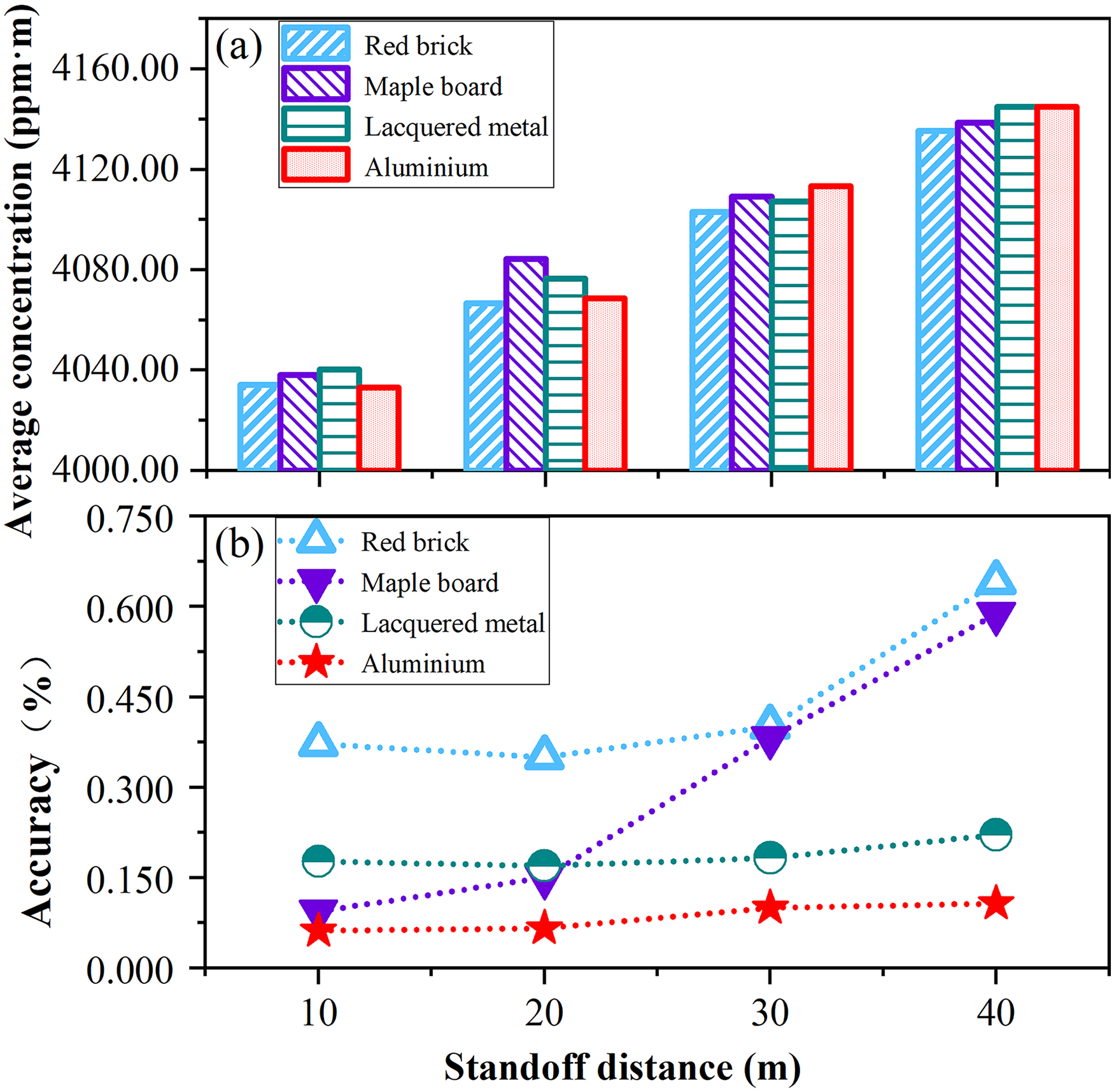
(a) Average concentration at various distances and non-cooperative targets; (b) accuracy at various distances and non-cooperative targets.
Dynamic Response
The dynamic response time τ (defined as the time taken to reach 63.2% of the final concentration value) of the standoff system was evaluated by introducing a gas cell filled with 10 000 ppm CH4 standard gas into and out of the standoff path to simulate the presence or absence of a gas leak. The experimental setup involved using aluminum as a non-cooperative target reflector at the standoff distance of 40 m, with the results shown in Figure 7. The gas cell was first placed inside the path and removed after 5 min. As can be seen in Figure 7, when there was a gas leak in the path, the dynamic response time of the sensor increased to about 1 s. When the gas cell was placed inside the path again after some time, the detection time of the sensor became longer because the gas cell could not fully return to its initial position in a short time. Therefore, it can be inferred that the dynamic response time of the standoff CH4 sensor is 1 s for actual gas leakage detection.
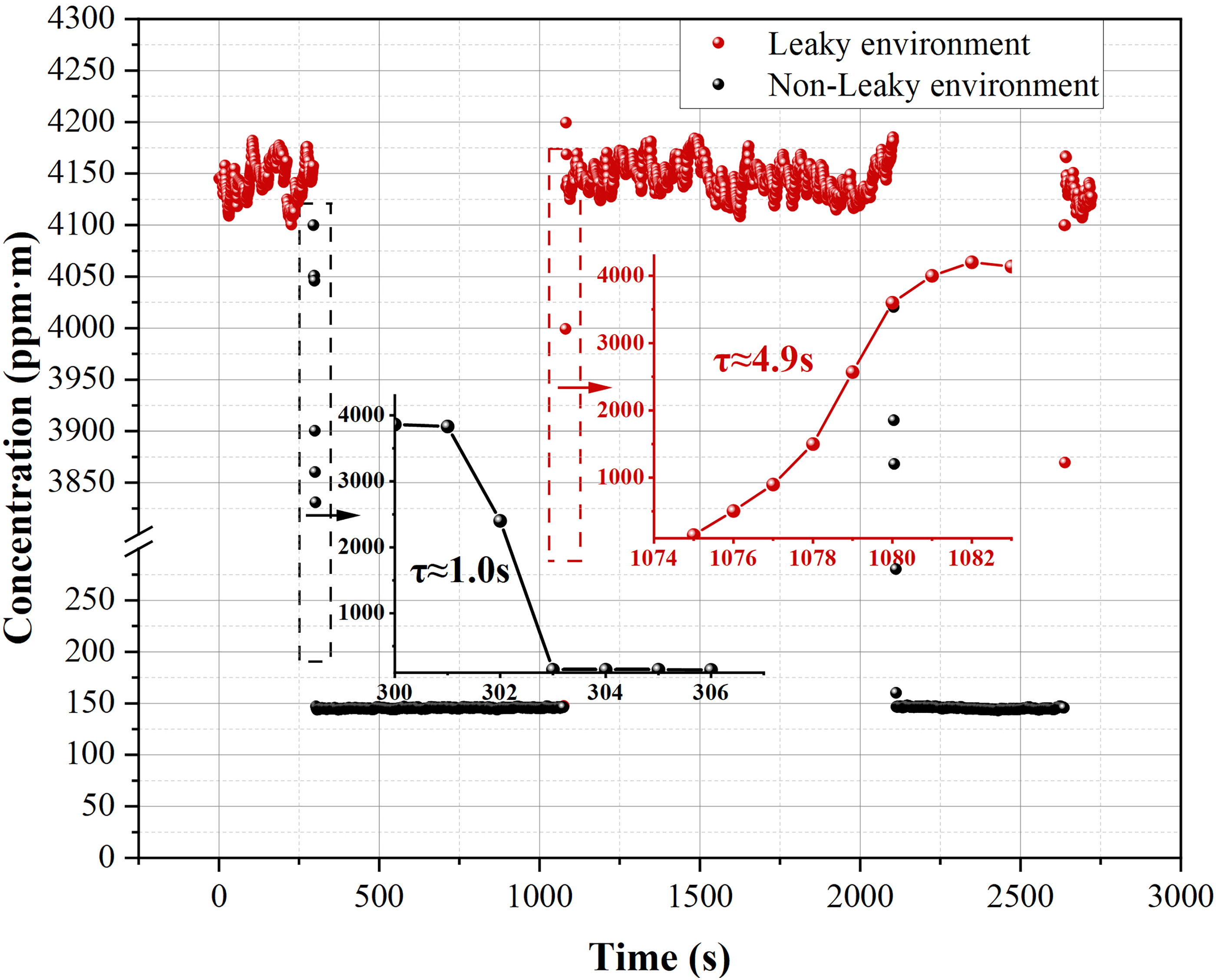
Experimental measurement results of dynamic response time (black indicates the results of measurements that simulate a gas leak-free environment; red indicates measurements that simulate an environment with a gas leak; 10 000 ppm CH4 standard gas in the gas cell; standoff distance 40 m; non-cooperative target reflector is aluminum).
Sensitivity and Stability
To evaluate the performance of the standoff sensor in detecting CH4, the gas cell filled with 10 000 ppm CH4 gas was placed in the optical path, and different reflector materials (red brick, maple board, lacquered metal, and aluminum plate) were used as a reflector, respectively, at a distance of 40 m. The system was then activated, and the measured concentration values were recorded over a period of 30 min. The Allan deviation curves for different reflector materials are plotted according to these continuous measurements, as presented in Figure 8. It can be seen that the surfaces with greater diffuse scattering yield a larger Allan deviation, which is consistent with the measured S/N at different non-cooperative targets. It is worth noting that different Allan deviation curves have basically the same optimal integration time. As depicted in Figure 8, a detection sensitivity of 4.08 ppm·m is achieved at an integration time of 1 s for the non-cooperative target of the aluminum plate. The detection limit can reach 1.24 ppm·m at an optimal integration time of 70 s. Beyond the optimal integration time, drift dominates the Allan variance, which mainly results from the interference optical fringing and the thermal drift of the diode laser and electronic components.
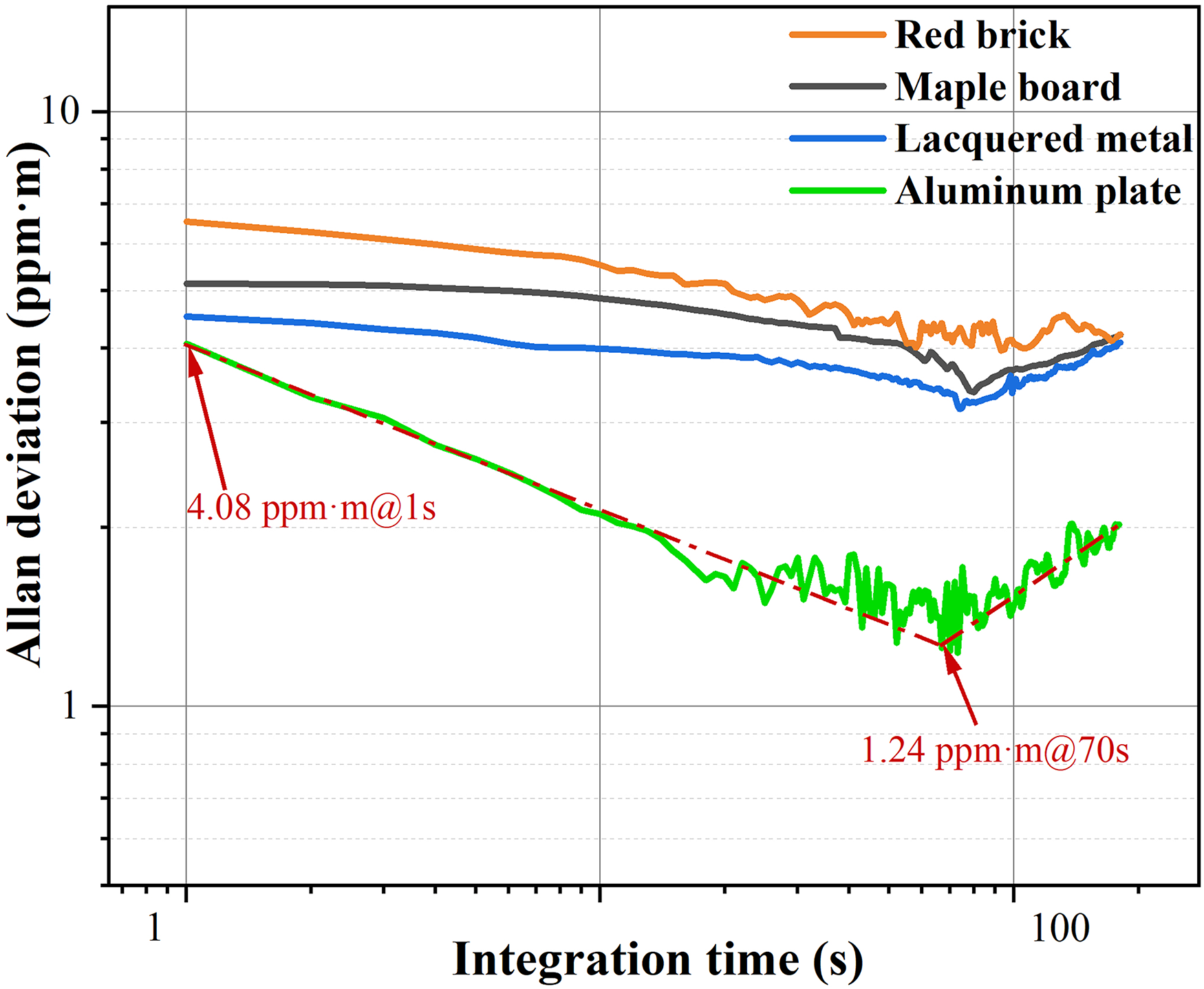
Allan deviation plot for different reflector materials.
Conclusion
Given the increasing frequency of natural gas pipeline leaks in recent years, there is a growing need for safe, effective, and sensitive CH4 gas detection equipment. This paper addresses this need by developing a standoff CH4 sensor with a non-cooperative target. The sensor performance is studied at various incident angles, distances, and reflectors, and the accuracy of the concentration inversion results is improved through the introduction of the Kalman filtering algorithm. Quantitative outdoor evaluation indicates that the sensor can achieve a standoff detection from a distance of 40 m. Moreover, the sensor offers an accuracy of 0.107%, a dynamic response time of 1 s, a sensitivity of 4.08 ppm·m, and a detection limit of 1.24 ppm·m. This miniaturized laser sensor provides an effective solution for the standoff detection of CH4 gas in complex environments. Additionally, our sensor holds implications for telemetry research on other gases, which can promote the development of a new generation of machine olfaction.
Supplemental Material
sj-docx-1-asp-10.1177_00037028231210586 - Supplemental material for Miniaturized and Portable Laser Gas Sensor for Standoff Methane Detection With Non-Cooperative Targets
Supplemental material, sj-docx-1-asp-10.1177_00037028231210586 for Miniaturized and Portable Laser Gas Sensor for Standoff Methane Detection With Non-Cooperative Targets by Jinyi Li, Wei Ma, Zebin Wang, Yun Zhou, Lingui He, Ming Lin and Yue Ji in Applied Spectroscopy
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant 62375204 and in part by the Tianjin Natural Science Foundation under Grant 20JCYBJC00160.
Supplemental Material
All supplemental material mentioned in the text is available in the online version of the journal.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.