
Abstract
Recently, the Internet of Things technology has rapidly spread and been applied in various fields including smart factories. Smart factory technologies are used for flexible process automation and custom manufacturing; thus, it requires adaptive network management for frequent network fluctuations due to mobility. Moreover, it is very important to ensure the timeliness of the data collected through the sensor nodes. In order to ensure network mobility in industrial WSNs, distributed scheduling algorithms should be supported. In this paper, we evaluated IEEE 802.15.4e-based industrial WSN MAC performances by using various mobility scenarios for smart factory environments. Also we proposed an IEEE 802.15.4e DSME-based distributed scheduling algorithm for mobility support and measured various performance metrics. The proposed algorithm can adaptively assign communication slots by analyzing the network traffic of each node and improve the network reliability and timeliness. The experimental result shows that the throughput of DSME MAC protocol is better than IEEE 802.15.4e TSCH and legacy slotted CSMA/CA in large network with above 30 nodes. Also the proposed algorithm improves the throughput by 15% higher than other MACs including original DSME. The algorithm was experimentally confirmed to reduce power consumption by improving the availability of communication slots.
1. Introduction
Industrial wireless sensor network (WSN) technology is indispensable for building a ubiquitous environment to form network connecting wireless sensor devices for various purposes. Recently, the Internet of Things (IoT) technology has spread rapidly and been applied in various fields, such as environmental monitoring, security monitoring, smart grids, and smart factories.
A smart factory is a factory in which all components are organically connected to each other via a WSN, using an intelligent operating system and the IoT. A smart factory technology is used for flexible process automation and custom manufacturing, so it needs adaptive network management for frequent network fluctuations. Moreover, ensuring the timeliness of the data collected through sensor nodes is very important.
Figure 1 shows the concept of smart factory based on Industry 4.0. A smart factory is composed of IoT sensor nodes, web-access based monitoring devices for workers, and a variety of process facilities. In a smart factory to support flexible process automation and custom manufacturing, the relocation of equipment occurs frequently. Therefore, high reliable industrial wireless sensor network technology is essential to support mobility.
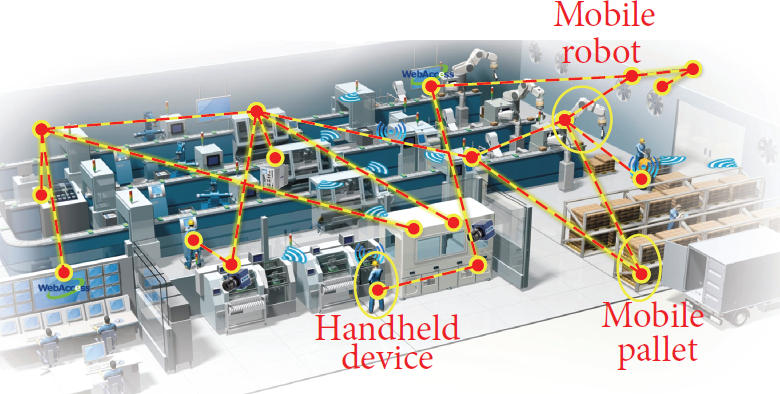
The concept of smart factory based on Industry 4.0 [13].
In particular, IEEE 802.15.4 [1] has become a representative standard for industrial WSN. It specifies the physical layer and media access control for low-rate wireless personal area networks (LR-WPANs) using a 2.4 GHz nonlicensed band frequency [2]. IEEE 802.15.4 has an advantage of low-power and low-cost communications but also has limitations in ensuring reliability and low transmission delay, and peer-to-peer communications, and is missing various quality-of-service mechanisms. In addition, it is difficult to ensure transmission reliability and WSN timeliness on the IEEE 802.15.4 2.4-GHz frequency band because it has a frequency communication technique similar to other networks, such as 802.11 WLAN (wireless local area network), Bluetooth, and UWB (ultrawide band). Frequent transmission errors due to the increase in network traffic and serious interference problems occur.
The existing industrial WSN is intended for a fixed network. Its purpose is highly reliable, low-latency data acquisition, so it does not consider network mobility. Two IEEE 802.15.4e representative standards include the WirelessHART of the HART (Highway-Addressable Remote Transducer) Foundation and the ISA100.11a of ISA (International Society of Automation). However, these standards do not consider mobility. In the future industry environment, the various sensor devices including both stationary sensors and mobile sensors can communicate with each other briskly. In such an environment, the collaboration of stationary sensors and mobile sensors is very important. Therefore, the development of industrial wireless sensor network technology that supports mobility is indispensable. In addition, in order to ensure network mobility in industrial WSNs, a distributed scheduling algorithm should be supported.
In this paper, we study the performance of IEEE 802.15.4e-based industrial WSN for smart factory environment. After that, we derive the appropriate industrial WSN MAC in mobility scenarios. The main contribution of this paper is the IEEE 802.15.4e DSME-based distributed scheduling algorithm for mobility support and the simulative analysis and comparison to the original standard. We evaluate the performance of different MACs, such as throughput, end-to-end delay, control overhead, network forming time, and power consumption. The proposed algorithm can adaptively assign communication slots by analyzing the network traffic to improve the network reliability and timeliness.
The rest of the paper is organized as follows. In Section 2, IEEE 802.15.4e DSME and TSCH MAC protocols are introduced, and some basic features of protocols are described. Also we state some studies about distributed scheduling algorithms. In Section 3, our implementations of IEEE 802.15.4e DSME-based distributed scheduling algorithm are described. The performance results of IEEE 802.15.4e DSME, TSCH, and legacy slotted CSMA/CA in mobility scenarios are compared in Section 4. Finally, we conclude our study in Section 5.
2. Related Work
2.1. IEEE 802.15.4e Standard
The new IEEE 802.15.4e transmission standard, standardized in 2012, has been proposed to complement the existing IEEE 802.15.4-2006 and to ensure transmission reliability and the timeliness of wireless environments. It supports various MAC modes, such as DSME (distributed synchronous multichannel extension), TSCH (time-slotted channel hopping), LL (low latency), and RFID (radio-frequency identification) blink mode for various qualities of service and network performances [3, 4].
2.1.1. IEEE 802.15.4e DSME Features
DSME provides various functions for maintaining a superframe structure of the existing IEEE 802.15.4. However, DSME uses a multisuperframe structure with a couple of superframes to transmit data by DSME-GTS (guaranteed time slots) allocation. In addition, it supports multiple channels to solve the problems of frequency interference for network reliability. DSME MACs support large application domains and enhance link reliability by employing channel diversity schemes on top of a time-synchronized frame structure. To enhance RF-link (radio-frequency-link) reliability, DSME employs channel hopping and channel adaptation schemes [5].
Devices in a DSME-enabled PAN are time synchronized and transmit frames based on a specific time structure called a multisuperframe structure, which is an extension of the superframe structure defined in the IEEE 802.15.4 legacy MAC. The multisuperframe consists of 16 superframe slots of equal duration. The beginning of the superframe is dedicated for beacon transmission from a coordinator device; the rest of the superframe slots following the beacon transmission are used for either random-channel access or reservation-based access.
The portion of the superframe for random-access channel access is called the contention-access period (CAP). The portion of the superframe following the CAP is called the contention-free period (CFP), which is dedicated for reservation-based channel access. Seven superframe slots in the multisuperframe can form the CFP for applications requiring specific data bandwidth. These superframe slots are called guaranteed time slots (GTSs) [6]. Figure 2 shows a communication system in CFP in the DSME protocol. Data communication slots were assigned using GTS-handshaking between nodes with the channel offset.
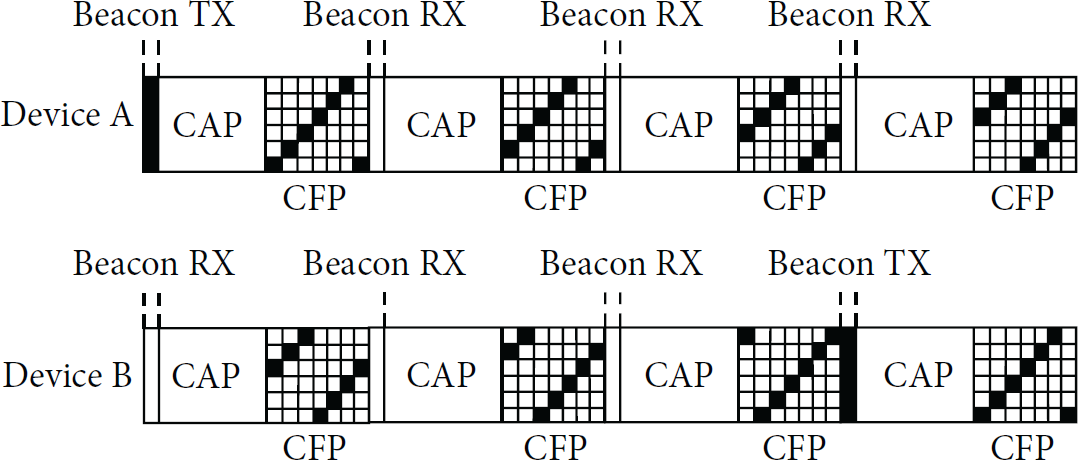
Example of CFP communications.
Also, DSME supports channel adaptive methods and channel hopping for channel diversity. It has a channel assignment similar to MAC mode TSCH, another IEEE 802.15.4e mode, and has a hopping sequence for collecting the channel state. However, if the channel is bad, the channel adaptive methods are registered in the Blacklist [3].
2.1.2. IEEE 802.15.4e TSCH Features
The Time-Synchronized Channel Hopping (TSCH) protocol, part of the IEEE 802.15.4e standard [2] since 2010, is the latest generation of highly reliable and low-power MAC protocols. The initial concept emerged in 2006 as the proprietary Time-Synchronized Mesh Protocol (TSMP) [3], conceived for multihop wireless sensor networks (WSNs) based on the HART [4]. Through time synchronization and channel hopping, TSCH enables high reliability while maintaining very low duty cycles, and thus the utmost power efficiency.
In TSCH, nodes synchronize on a slot frame structure. A slot frame is a group of slots that repeats over time. Each node follows a schedule that tells it what to do in each slot: transmit, receive, or sleep. For each active slot, the schedule indicates which channel to use and which neighbor to communicate with. The TSCH consists of a slot frame, time synchronization, message ACK, and channel hopping method in nonbeacon mode. In the TSCH mode, when transferring a periodic advertisement frame and broadcasting their available resources, nodes that wish to join the network transmit a join-request frame. By receiving the network information, they connect to the network. Nodes that are invited to participate in the network will be allocated a channel and a slot number through the activate frame.
Figure 3 shows the slot frame structures used in TSCH. Unlike DSME's superframe structure, TSCH partitions the slot that communicates with the big two. The dedicated slot is the principal slot that communicates with the blue slots in Figure 3. In addition, there are other types of slots, a red shared slot and a yellow public time slot. With shared slots, wireless sensor networks gather nodes at the level of the network tree. The new channel numbers and the slots wishing to join the network that can be transferred to the join frame of a node are insufficient. In this environment, there is a method for increasing the efficiency of the maximum communication slot.
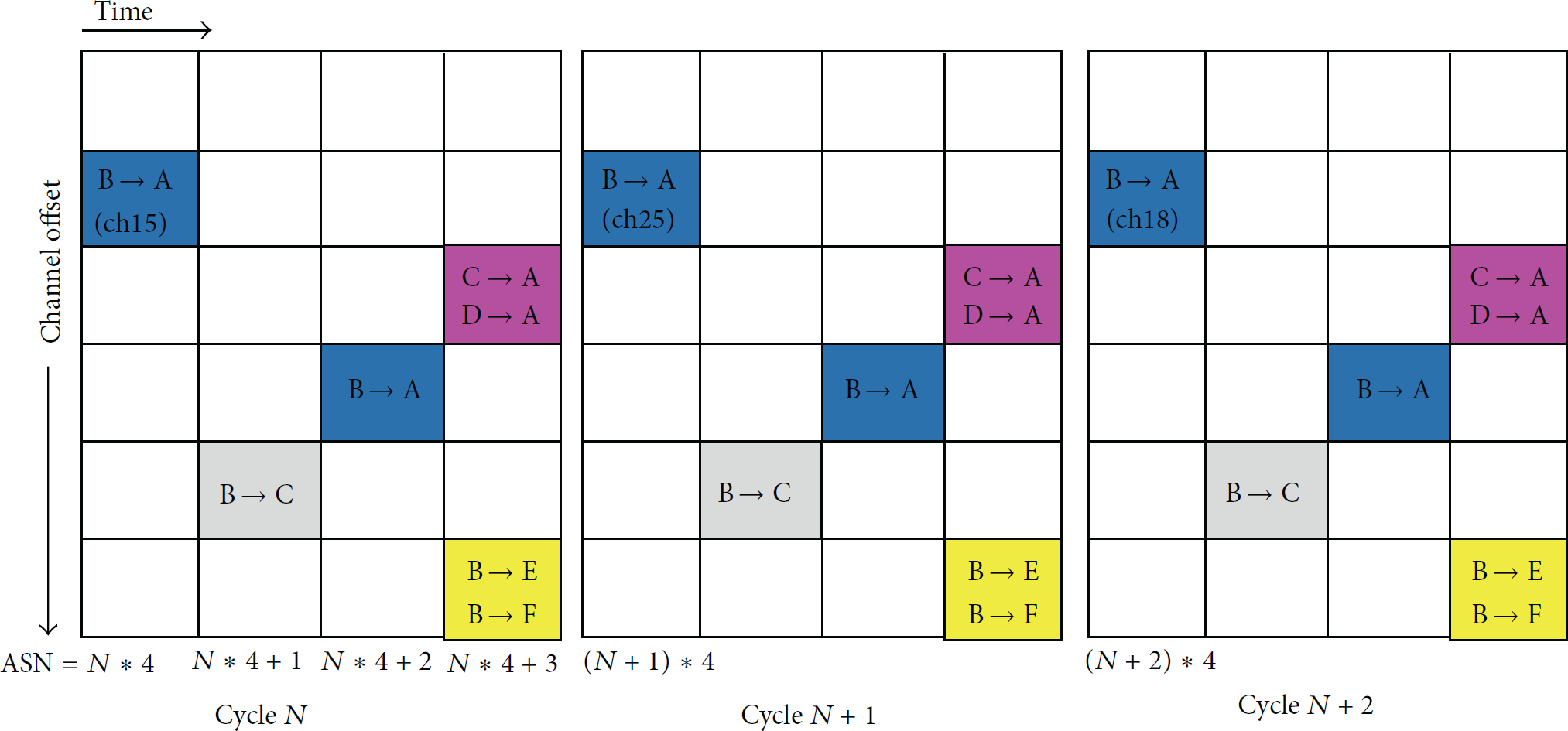
Example of TSCH slot frame.
2.1.3. Difference with DSME and TSCH in Network Forming
The biggest difference between DSME and TSCH appears in the process of network forming. Figure 4 shows the general network forming in DSME. The allocation of slots and selection of the network coordinator is made by the individual nodes. Moreover, the initial cost of DSME is low, because each coordinator only holds the network formation and scheduling information for its subtree. Thus, the network is not limited to a hierarchical network topology; a mesh-grid network topology can also be deployed in DSME-enabled PANs. This feature substantially decreases the end-to-end latency for periodic monitoring applications in multihop environments, since the number of hops can be minimized by selecting the proper neighboring devices and scheduling GTSs.

Network forming in DSME.
In contrast, the IEEE 802.15.4e TSCH is a centralized MAC scheme that manages network formation, slot allocation, and data communication from root to leaf nodes. Figure 5 shows the general network forming in TSCH. The root node knows all node and route information. It can ensure high transmission reliability in a large-scale sensor network that is not mobile. However, because the root nodes are involved in the entire process, there is a disadvantage in that initial cost to allocate entire slots is very high. Moreover, if there is a change in the network, the performance degradation is significant.

Network forming in TSCH.
2.2. Distributed Scheduling Algorithms
In an industrial environment, efficient collection methods are very important and can be divided into two main approaches. The first method is a contention-based approach. A sensor node transmits sensing information by competing with other nodes to secure the communication opportunity; examples are the CSMA scheme (carrier-sense multiple access) and the Aloha techniques. The second method is a reservation-based approach that can specify the communication order of the sensor nodes. It assigns one a communication slot and uses a scheduling algorithm for another, for example, TDMA (time-division multiple access) methods and various scheduling algorithms [7–9].
In addition, the scheduling mechanism for mass sensor-data gathering is very important. A static scheduling mechanism allocates a predetermined communication sequence or a slot number in the network formation process. This method has high performance because it can perform efficient scheduling for transferring information as the root node; however, when network variation is high, its performance is poor. Moreover, since excessive information is gathered to the root node, the energy consumption is high and it is not suitable for a low-power sensor network.
On the other hand, a dynamic scheduling mechanism allocates the communication sequence in the network formation process. Then, all sensor nodes exchange their scheduling information with neighbor nodes and determine the optimal scheduling. It can easily be applied in a relatively low-power consumption sensor network; one advantage is that the protocol load is low.
Over the past few years, several researchers have attempted to construct scalable multihop WPANs, based on a beacon-enabled mode, with high network performance. The major challenges in a multihop extension are synchronization and collision avoidance. Various beacon-scheduling methodologies have been proposed to address these two problems. The scheduling algorithms can be divided into two categories according to topology: static scheduling and distributed scheduling. Tables 1 and 2 show static and distributed scheduling methods for wireless sensor networks.
Static scheduling.

Distributed scheduling.

Some works in the literature [5, 7, 10] proposed mechanisms to assign communication slot based on tree topology. However, they may not be able to cope with variations in network which caused the mobility of nodes. Moreover, they are not fit for large-scale WSN.
Figure 6 shows the multichannel superframe scheduling (MSS) scheme to avoid beacon collisions. The MSS is to use the maximum superframe duration (major cycle) to determine the time slice length and to schedule on a different channel within minimum time slice (minor cycle). Theoretical results showed that, compared to traditional time-division superframe scheduling, the MSS schedulability space is increased by a factor of 2 in the space of all the possible network configurations and by a factor of

The multichannel superframe scheduling schemes.
A traffic-aware scheduling algorithm (TASA) proposed a network forming scheme using graph coloring and traffic-aware scheduling by calculating its own queue length. Equation (1) shows equations of local queue length and global queue length:
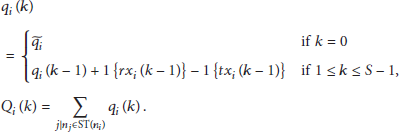
Our proposed algorithm supports multisuperframe structure for large-scale industrial WSN and beacon scheduling to avoid beacon collisions. In addition, the proposed algorithm adopted the distributed scheduling in consideration of the traffic in multisuperframe in order to solve low performance and high overhead in the tree-based distributed scheduling as mentioned in [11, 12].
3. Distributed Scheduling Algorithm for Mobility Support in IEEE 802.15.4e-Based Industrial WSNs
3.1. Implementation of IEEE 802.15.4e-Based Industrial WSN
The industrial WSN collects periodic sensing information from each node; it is commonly sent to the parent node. Therefore, if the industrial WSN constitutes a star or tree topology, the traffic is concentrated in a number of nodes, or some sections go to the parent node. Various aggregation techniques can be used to solve these bottlenecks; since the reliability plane of the network is a loss, it is necessary to apply it in accordance with the service and traffic characteristics.
In a wireless sensor network where mobility has been strengthened—such as the smart factory in the limelight recently—and network fluctuations are intense, scheduling techniques for existing periodic sensor networks are not appropriate. The smart factories and IoT environments move the sensor node in preparation for network variations, as well as requesting different topology changes, management, and repair functions. Therefore, rather than using centralized scheduling techniques, it is essential to properly apply a distributed schedule to accommodate the situation of each node network.
3.2. Distributed Scheduling Algorithm
The basic idea of this study is to maintain the maximum number of communication slots, which may be a basic communication mode of IEEE 802.15.4, managed by the maximum size of the slot frame depending on the number of available channels desired. When applying the IEEE 802.15.4-2006 physical layer, the number of available channels is distributed over 2.4 GHz–2.460 GHz, for 12 channels on domestic frequency bands.
Each channel has no interference from orthogonal channels; however, recent studies have confirmed that there is physical interference from adjacent channels. Thus, while avoiding adjacent channels when allocating slots as far as possible, it is important to keep the maximum time slice. In addition to the parameters in the slot offset for distributed scheduling, for example, channel offset, delay time, and channel number, superframe parameters (beacon order, multisuperframe order, superframe order, etc.) have been implemented.
Algorithm 1 shows the basic slot assignment algorithm based on IEEE 802.15.4e DSME protocol. First, since the network configuration method is different according to each MAC mode, the scheduling information is collected from the assignment of the first communication slot. DSME and IEEE 802.15.4 slotted CSMA/CA operates in much the same way. Depending on the set superframe structure, the first slot always transmits beacon frames. Since the multihop must support both the 802.15.4 legacy and DSME star topologies, possible nodes that are attached to the root send their beacon frames to the first slot, and each node waits to request a connection to the network.
( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( ( (
All nodes that received the beacon frame transmitted from the PAN coordinator contact the coordinator based on a preset manner in the association beacon, rather than compete for connections. The PAN coordinator may receive this, having previously set the coordinator, as much as possible so that the grouping will not cause physical interference between the clusters, depending on the number of nodes assigned to the basic channel for each coordinator. Figure 7 shows general slot assignment process between PAN coordinator, coordinator, and devices.

General slot assignment process.
The coordinator node communicates with the PAN coordinator, via respective competition if the representative channel of the cluster is allocated, so that he propagates the beacon directly. In this case, the remaining nodes participating in the network will enter the listen state to receive the beacon. Each sensor node receives a beacon frame around it and transmits the association request frame to select the best coordinator link-state therein.
Each node is assigned its own channel and slot numbers via the GTS-Handshake; it then attempts to communicate with the next beacon interval. CSMA/CA can perform the association procedure while staying in the shared channel until it receives its assigned channels. DSME runs the association via the CAP interval and enters a sleep state until after its time slot's CFP interval. In contrast, TSCH operates in a nonbeacon mode and receives the advertisement frame of the root node for each fixed time, to form a network. The flowchart below shows the process to receive the assigned basic scheduling information from the root and PAN coordinator.
The basic scheduling information is assigned, the network is formed, and the nodes operate in a predefined scenario: each node exchanges information for distributed scheduling, such as neighbor node, cumulative queue-length information, slot information, and coordinator information. This information derives a flag value to use when sending a burst packet. If the node is moving, such information is no longer exchanged. It receives the information from a stationary node; it preferentially occupies the slots that can communicate until it is possible to establish a new connection.
Each node sends the queue length that was provided to the upper node by the QualNet simulator, which was implemented so that it can calculate the traffic from the current node and receive the queue length from the new node. The idle slot can be discharged to perform a distributed scheduling. Moreover, if its queue length is greater than its neighbor node, the slot stealing function can consecutively communicate with the current slot. If it is not possible to communicate with the existing schedule through slot stealing, the next beacon interval is started. Slot retransmission is possible three or four times in an assigned CAP interval. Figure 8 shows the distributed scheduling process applying the slot stealing method.

Distributed slot assignment process.
4. Experiment
4.1. Experimental Environment
In this study, simulations were performed on Scalable Networks, Inc.'s QualNet 6.1 network simulator, the most widely used commercial simulator. QualNet supports the network MAC stack and many communication technologies, such as WLAN, WSN, 3G, LTE, GSM, and Wibro. Unfortunately, IEEE 802.15.4e was not implemented. Therefore, we implemented the DSME MAC protocol in an IEEE 802.15.4/Zigbee Stack.
First, after replicating the 802.15.4 PHY/MAC layer with the existing QualNet, we generated a new protocol stack by applying the field value, packet format, and IEEE 802.15.4e enhanced beacon parameters. In addition, we implemented the multihop DSME scheme referring to the standard TRLE (time-slot relaying-based link extension) specification. Moreover, IEEE 802.15.4 slotted CSMA/CA was used for performance comparison with DSME and TSCH. Some changes were implemented for the experiment.
The experimental environment of the QualNet simulator used in this paper is organized as follows. Table 3 shows QualNet simulation parameters in our experiment. The number of channels is 12, which is the same as the IEEE 802.15.4-2006 physical layer. We set up the same frequency band as in our country. We used the two-ray path-loss model that is the basis of QualNet. The fading and transmission power were also set to be the same in all protocols. In order to confirm the packet-transmission performance values, such as throughput, end-to-end delay time, and control overhead, when operating the TSCH, slotted CSMA/CA, and DSME MAC protocols, we used sensor networks' best-known Mica-mote energy model.
Experimental parameters.
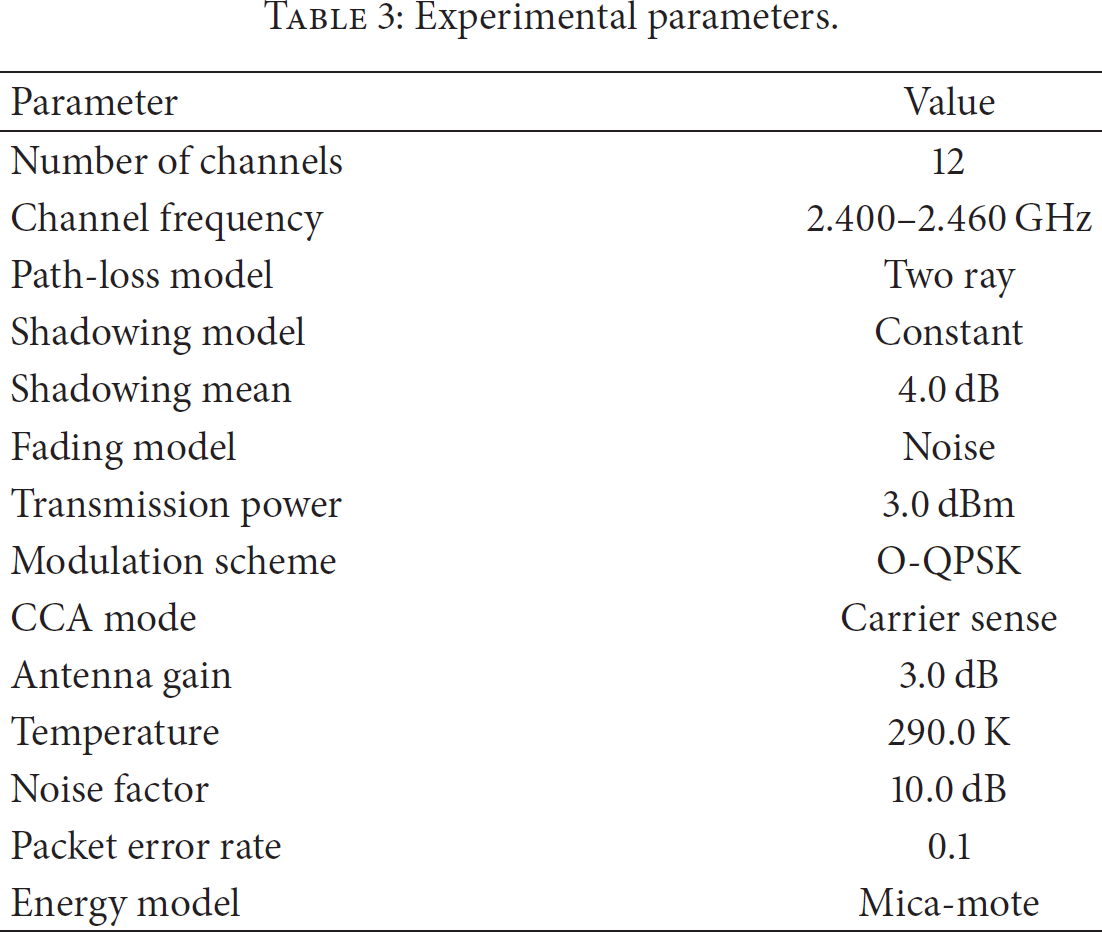
The number of nodes varied from 20 to 100 with gird, uniform, and random topology. All devices were configured to transmit data to their own coordinators. The overall packet-error rate was 0.1 for wireless communication, similar to the physical environment. This means that transmission errors occur 10% of the time. Then, we observed the degradation of the network performance by retransmission. The device also provided variable factors due to adding a network that operated up to 300 seconds and woke up randomly. Each simulation ran for a total of 300 seconds. We ran simulation 100 times using different seed and we calculated average results.
The data size used in the experiment was 40 bytes, and each node sent 100 packets in its assigned slots. In addition, the PAN coordinator in the center was excluded from the number of nodes, and the coordinator node had 10 nodes manually within the subtree. The beacon interval was two seconds. The superframe structure size of one communication slot was 15.36 ms. Thus, BO = 7, MO = 5, and SO = 4. Four multisuperframes were generated. The CAP reduction method was not used, for an accurate comparison of the DSME communication interval with slotted CSMA/CA and TSCH, but the number of slots was the same.
The simulation scenario ran for a total of 300 seconds; the device was set to sequentially transmit 100 data packets. In order to set up accurate simulation the PAN coordinator operates firstly; then coordinators build the basic topology. All other 100 devices wake up at that time. To apply mobility in our simulations, each device randomly moved at pedestrian speed for 30 s at 1 m/s using random waypoint technique. When the custom manufacturing occurs in smart factory, all workers and factory facilities such as transfer crane, mobile robots, network camera, and monitoring tools will move as slow as average 1 m/s speed.
In addition, the slot assignment for DSME data communication is to assign the slot orders and channels using an association process. The slotted CSMA/CA and TSCH used a basic scheduler based on round-robin provided in QualNet.
4.2. Experimental Results
In this paper, our experiments were divided largely into two parts. At first, we analyzed the performance of IEEE 802.15.4e TSCH, DSME, and legacy 802.15.4 slotted CSMA/CA used primarily in industrial WSN. Also, we derived the appropriate MAC in mobility scenario for smart factory. A smart factory has an informal network topology because its network depends on the characteristic of process automation and types of facilities. So we compared the performance evaluation in various topologies. Figure 9 shows an example of a grid, a random topology provided by QualNet, and the uniform topology is similar to the grid topology.

Examples of grid topology and random topology.
4.2.1. MAC Performance Comparison without Mobility
Figure 10 shows the network performance for a random topology. In a random topology, as the number of nodes increases, the network complexity increases and the network formation time is prolonged. In addition, the topology skewed because many nodes connected to a particular coordinator. It makes data collection path longer, so the performance degradation of the three MAC protocols occurs. However, the performance degradation of DSME is less than TSCH. The reason is that the average number of hops and average time of network formation of DSME are smaller than TSCH. According to our simulation, when the number of nodes is above 30, the average hop-count of TSCH is 5.5, but the hop-count of DSME is 3.2. Also the association time of DSME is lower than TSCH.

MAC protocol performance in random topology.
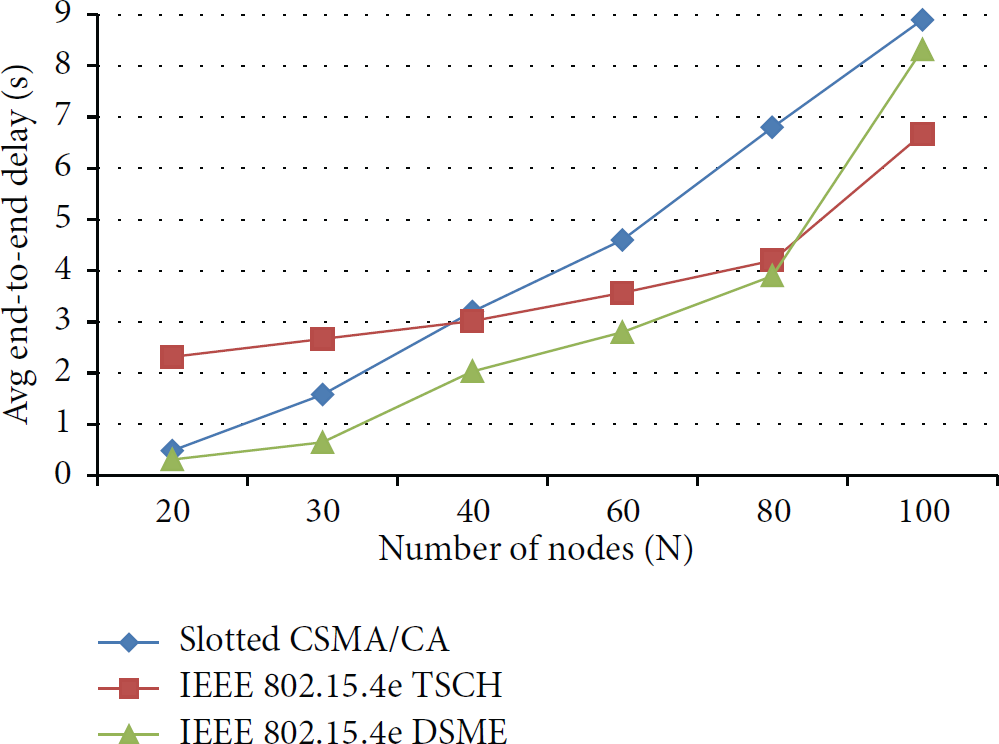
Figure 11 shows the average end-to-end delay in a random topology. As the number of nodes increases, the end-to-end delay time of the three MAC protocols was prolonged. However, the IEEE 802.15.4e DSME MAC protocol was lower than the other MAC protocols because it used the CAP period to manage the network topology and reallocated communication slots in CFP. In contrast, the slotted CSMA/CA and TSCH executed packet retransmissions and requested scheduling information.

Average end-to-end delay in random topology.
Since DSME manages synchronized-node information in the beacon at the coordinator node before resuming communication, network fluctuations matter. The PAN coordinator forms a network through the beacon around the coordinator by allocating a direct slot. Thus, it is possible to expect a quick service restart.
Figure 12 shows the performance of each MAC protocol when configuring the grid topology. If we do not include errors and variations due to the addition/deletion of sensor nodes, then the bandwidth difference between protocols is significant. However, observing that the average number of associations in each node run was 8.7 times, in the case of severe changes in the network, the difference in bandwidth between MAC protocols was not large. In DSME's case, it was determined that the bandwidth gradually decreased as the number of nodes increased and could be secured to some performance characteristics.

MAC protocol performance in grid topologies.
In DSME and TSCH, although the performance reversal occurred when the number of nodes increased to 60, the difference did not spread, thanks to the nested topology of the control overhead of DSME and TSCH.
Figure 13 shows the average end-to-end delay. As compared to previous experiments, the number of nodes increased because of an increase in the hop number, and then the network complexity increased. Overall, it became clear that the delay time tended to increase automatically. Further, when the retransmission packets increased, the slotted CSMA/CA indicated that the delay time increases rapidly in the case of DSME because of the increase in retransmission packet or link errors, due to repeating the association processes.
Average end-to-end delay in grid topology.
However, in DSME, the delay time increase was less than for the other MAC protocols. TSCH and DSME generally showed a better delay time than conventional slotted CSMA/CA, and as the network complexity increased, a delay time of several seconds occurred. The collateral evidence indicated the need for channel assignments and scheduling. On average, DSME showed about 20% lower latency time than TSCH.
4.2.2. Performance Comparison in Mobility Scenarios
From a previous experiment, when the number of nodes increases, the network complexity increases, and then overall performance degradation appears. In particular, the network formation process of TSCH is more complex than DSME, the performance is reduced significantly. However, the performance of centralized TSCH is the highest in a small network or stable network. In contrast, DSME forms a network around the coordinator regardless of the number of nodes and type of topology. So, the DSME MAC showed good performance in complex environment.
Also, we compared the MAC performance of industrial WSN where there is mobility as a smart factory. We evaluated the three existing MAC modes and DSME equipped with the proposed algorithm. In our simulation, the superframe structure was set to have a maximum of 32 data communication slot in a beacon interval, because it is difficult to verify the effectiveness of the proposed algorithm in small network. When the number of nodes increases above 30, and the number of communication slots is insufficient, there is a need for scheduling technique. Also, as the network complexity increases, our proposed algorithm is able to improve the performance in dynamic network.
Figure 14 shows the throughput for all stationary nodes. While increasing the number of nodes in a uniform topology in which the bandwidth was measured, we analyzed the MAC performance when all the nodes were fixed and did not move. The TSCH performance was relatively very high, after the number of nodes in the network formation increased, in order to communicate while avoiding interference between the nodes.

Throughput for all stationary nodes in uniform topology.
The performance of TSCH was high in most cases. However, when the number of nodes has increased, a time and an average depth of network formation of TSCH also increased. So the TSCH performance degradation occurred. Legacy slotted CSMA/CA showed a low performance because of its MAC overhead. In the case of DSME, the performance was lower than TSCH. But DSME applied the proposed distributed scheduling algorithm that showed good performance when the number of nodes is 80 or more.
Figure 15 shows a case in which 30% of all the nodes showed a bandwidth in which to move. With the basis of 100 nodes, 30 nodes were randomly selected to move to random waypoints at a speed of 1 m/s for 30 s. In this process, variations in the existing network occurred, and the nodes were attached to the new network, which was readjusted for situations where link errors occur in the existing topology.

Throughput in 30% mobile nodes in uniform topology.
When the number of nodes is 20, TSCH shows better performance. But the performance of DSME is reversed when exceeding above 30 nodes because it uses the CAP and CFP periods for data acquisition and network management. Despite the lack of slots for data communication, DSME is advantageous in the recovery and formation of the network. It showed a slightly better performance than TSCH. As TSCH repeated the retransmission and association processes, we were able to see that the performance degradation occurs. In the case of a combination DSME and the proposed algorithm showed the better performance than other MACs.
Figure 16 shows the performance difference between DSME and TSCH for a bandwidth comparison in which 50% of the total nodes moved. It was confirmed that little more occurred. DSME used the method for transferring to the upper coordinator via the reserved slot either in the CFP interval, or during the CFP reduction, like an adjustment technique when adding a superframe. It is expected that it is possible to further improve the performance. If the entire node moved, the variation width of the network would make it difficult to compare the significant performance trends. Also a combination of DSME and the proposed algorithm showed performance about an average of 15% higher than other MAC modes.

Throughput in 50% mobile nodes in uniform topology.
4.2.3. Scheduling Efficiency
We defined the scheduling efficiency metric to assign available empty slots and provide enough network resources. It was expressed as a simple metric. Scheduling efficiency considers the number of nodes, mobility, and those created by including protocol overhead, representing whether distributed scheduling can improve the efficiency of the scheduling of mobility in many industries for a wireless sensor network environment:

Scheduling efficiency
Figure 17 shows the DSME scheduling efficiency. If all nodes are stationary, the number of nodes can be seen to have a lower scheduling efficiency value, even by applying the distributed scheduling after more than 40 units. It is not intended to mean that the performance is lowered; it is that current by limiting the construction of a DSME multisuperframe, indicating that efficient scheduling drops when the number of nodes in the cluster exceeds 40.

Scheduling efficiency in DSME protocol with proposed algorithm.
According to the current settings, since 32 communication slots are all the slots that may be used in the CFP since it maintains up to four multisuperframes, in the case where 40 or more slots are used, the next beacon boundary signals that the communication cycle has been completed. It is important to ensure the maximum number of slots for data communication by using the idle slot in the CAP interval. However, the CAP section is intended to provide for network fluctuations. It is necessary for the multisuperframe management functions to work with the distributed scheduling scheme for information exchange for managing the participation and topology of new nodes.
4.2.4. Control Overhead
Finally, the control overhead of each MAC protocol is the number of packets left after subtracting the data packets from the total packets. Table 4 shows the control overhead ratio of each MAC protocol in previous uniform topology experiment. The ratio of slotted CSMA/CA was set to 1 and the measured percentage of the other MAC protocols is shown. In slotted CSMA/CA, the retransmission and association packets were larger than the other protocols, but overall the control packets were lower than generic TDMA and IEEE 802.15.4e DSME. In DSME, when the number of nodes increased, the number of association phases and DSME-GTS-Handshaking phases increased; however, the average end-to-end delay time was lower than the other MAC protocols. Despite the higher control overhead, IEEE 802.15.4e DSME protocols ensured network reliability and timeliness better than other MAC protocols.
Control overhead ratio of MAC protocols.
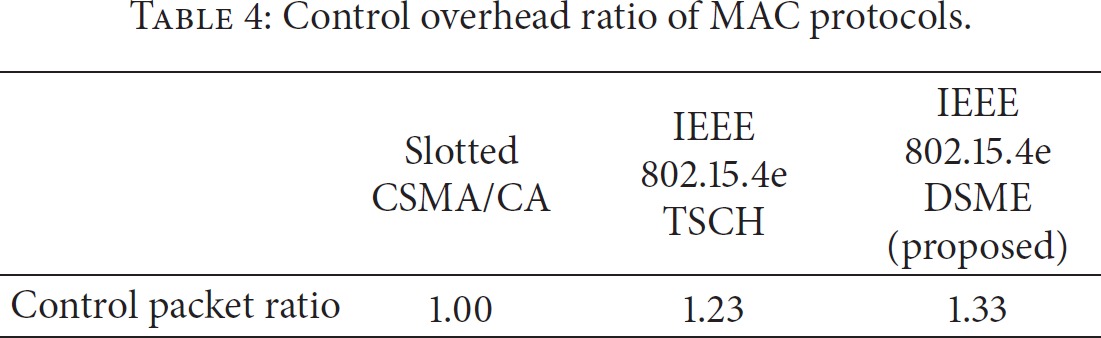
Although TSCH does not have a high proportion of control packets across the packets, the network load for the send and receive direct communication control packets, from the top PAN coordinator to the lowest node, is nearly 20% higher than slotted CSMA/CA. Packets are transmitted and received by the beacon frame and the association process is repeated in DSME cases. It has a large network load, such as packets that are generated via Handshaking with DSME-GTS slot assignment processes, considering the other properties, such as average delay time. It can be seen that, by setting the delay required by the application layer to the upper bound, it is possible to configure the network to satisfy the lower latency and timeliness of other MAC protocols.
Figure 18 shows accumulative packet collection time of 40 nodes in uniform topology. The average network formation times are 82, 123, and 140 seconds for DSME, TSCH, and slotted CSMA/CA, respectively. DSME has the shortest average time to transmit 100 items to each node. Figure 18 shows the timestamp of the last packet sent for each node. DSME is better than TSCH for transferring over relatively short hops to the coordinator because the proposed algorithm measures the local queue length at the coordinator and reschedules idle slots to communicate. For TSCH, more effective communication is possible by applying a multihop routing scheme, because it is relatively more affected by the topology type.
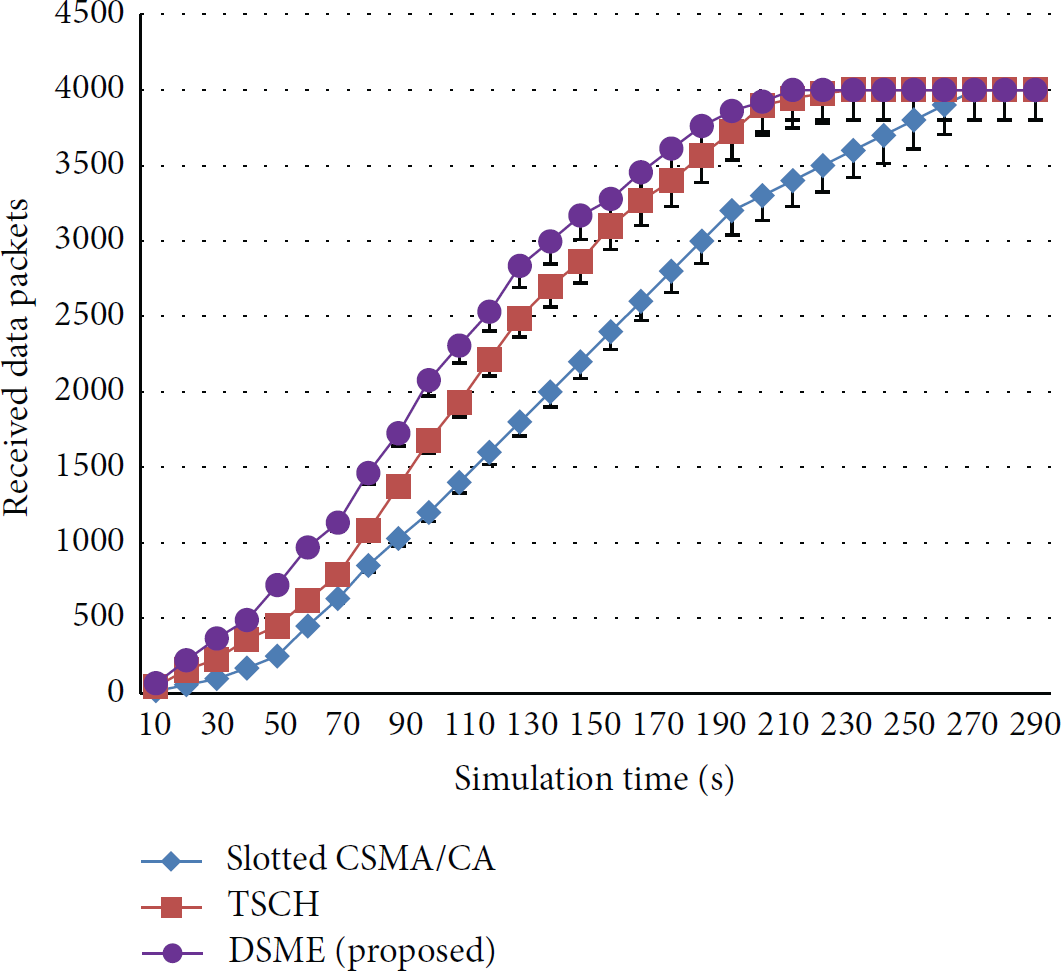
Accumulative packet collection time (100 packets/node, 40 nodes).
4.2.5. Power Consumption
We compared the power consumption of the proposed protocol with three MAC protocols in previous uniform topology experiment. Figure 19 shows an average power consumption per node of three MAC protocols. In this case, slotted CSMA/CA is approximately twice as high as the others because of frequent carrier senses and collisions. However, TSCH has 15% lower power consumption than DSME, because DSME uses both the CAP and CFP periods to communicate.

Average power consumption of three MAC protocols.
When the distributed scheduling is applied, the DSME's power consumption was reduced about 40% (violet). It was lower than TSCH. In case of DSME, if the distributed scheduling is applied, it can assign slots optimally as TSCH. Moreover, the data path of DSME is relatively shorter than TSCH. When the node moved to another cluster, the new association process is simple in DSME. Hence, the power consumption was significantly reduced.
5. Conclusion
In this paper, we studied the performance of IEEE 802.15.4e-based industrial WSN for smart factory environment. We evaluated MAC performance of IEEE 802.15.4e DSME, TSCH, and legacy 802.15.4 slotted CSMA/CA. The main contribution of this paper is IEEE 802.15.4e DSME-based distributed scheduling algorithm for mobility support and the simulative analysis and comparison to the original standard. We also measured the network performance of different MACs, such as throughput, end-to-end delay, control overhead, network forming time, and power consumption. According to our simulation results, as the number of nodes increases, network performances get worse. In particular, in the case of TSCH, the root forms a network and allocates slots centrally. So the network formation time and the average hop-count increased; the performance degradation is intensified. On the other hand, DSME forms a network around each coordinator. So, the average number of hops and the network formation time of DSME are relatively smaller than TSCH. Due to these advantages, the DSME shows better performances than TSCH and legacy slotted CSMA/CA in large network with above 30 nodes. Further, the proposed algorithm can adaptively assign communication slots by analyzing the network traffic to improve the network reliability and timeliness. The proposed algorithm improved the throughput by 15% higher than other MACs including original DSME. Also the network forming time of proposed algorithm was 82 seconds which was shorter than other MACs. The power consumption was reduced by 40% than original DSME and other MACs. In future work, we will implement the real test-bed by using COTS hardware and evaluate network performance in mobility scenarios.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP) (NRF-2014R1A2A1A11053047) and Energy Efficiency & Resources Core Technology Program of the Korea Institute of Energy Technology Evaluation and Planning (KETEP) granted financial resource from the Ministry of Trade, Industry & Energy, Republic of Korea (no. 20151110200040).