
Abstract
Underwater acoustic sensor networks (UWASNs) are effective tools for exploring and observing the ocean. Due to the nonnegligible physical restrictions of the underwater acoustic communication, most MAC protocols applied in the existing terrestrial wireless networks become inapplicable. In this paper, we propose a multiple handshaking MAC protocol for UWASNs called multihandshaking MAC (MHM). Using the method of multiple handshaking and competitive mechanism of control packets, our protocol is proposed to make the contending nodes share the underwater acoustic channel much more fairly and more efficiently. The main idea of MHM is to allow multiple nodes to transmit and receive data packets at the same time without packet collisions. We also propose a competitive mechanism of control packets, which can guarantee that there will not be data collisions in the process of multiple packet transmissions. Simulation results show that our protocol can achieve better performance, including throughput, delay, and fairness.
1. Introduction
The oceans occupy 71% of the earth's area, far more than the land area. The development of the ocean has important significance for the whole human survival and social development. With the rapid development of wireless sensor networks, underwater acoustic sensor network (UWASN) which has low cost and high reliability is becoming a new research hotspot in recent years [1–3]. UWASN is considered as an important way to explore and develop the ocean; it can provide better technical support for resource protection, pollution monitoring, disaster warning, marine engineering, marine military, and other activities, so UWASNs have been paid much attention by the governments and researchers around the world [4].
The medium access control (MAC) protocol enables multiple sensor nodes to share common channels without packet collisions. The main function of the MAC protocol is to ensure the fair and efficient use of the channel. Because of the limited band in underwater acoustic channel, the design of MAC protocol becomes a key technology in UWASNs. MAC protocol directly affects the performance of UWASNs, such as the throughput, end-to-end delay, and energy consumption of the network. Due to some inherent characteristics of underwater acoustic channel, high propagation delay, limited energy, and multipath effect, the design of MAC protocol of UWASNs faces many challenges [5]. Although there are a lot of mature MAC protocols on terrestrial wireless networks, those MAC protocols cannot be directly applied to UWASNs because of the different requirements and limitations. So it is very urgent to design new MAC protocols for UWASNs.
The MAC protocol generally can be divided into two categories: competitive access and noncompetitive access protocol. FDMA, CDMA, and TDMA are three main noncompetitive access mechanisms. However, none of them can be directly applied to UWASNs. Because of the severe limitation and highly dependency on distance between two communicating nodes of the available bandwidth, frequency division is not reasonable in UWASNs. CDMA could also be difficult to be applied to UWASNs because of the near-far problem. TDMA protocol has two disadvantages. The first disadvantage is that it requires precise synchronization between nodes. On the other hand, due to the high transmission delay, the duration of each time slot must be long enough, which will lead to low network throughput. Thus, the feasibility of these protocols in UWASNs is unclear [6].
In recent years, many competitive access protocols have been proposed for UWASNs [7, 8]. The classical ALOHA-based protocol does not have an effective mechanism to avoid packet collisions, so it is not suitable for UWASNs [9]. In the terrestrial wireless networks, the performance of the CSMA protocol is better than the ALOHA protocol. However, due to large propagation delay, carrier sense is hard to be realized in UWASNs [10]. Therefore, more and more researchers pay attention to the access protocol based on handshake mechanism. In the handshake protocol, the nodes use the control packet to compete for the use right of channel before sending data packets. Handshake protocols have the problem of hidden terminal and spatial fairness. In such protocols, a node schedules its transmissions according to the control packets it hears. These control packets also notify other neighbors about the ongoing transmission, including the hidden nodes, which could reduce collisions significantly. However, the handshaking mechanism was not destined for UWASNs where long propagation delays are prevalent. A situation of a hidden terminal problem occurs when a potential interfering node cannot receive control packets on time, and thus those control packets are unable to inform potential interfering nodes of the forthcoming packet transmissions. A defect of fairness problem also existed in the handshake protocol. Since a packet's arrival time is proportional to distance between receiver and transmitter, if the transmitter is closer to the receiver, it is more likely to obtain the right to use the channel.
To overcome the hidden terminal problem in UWASNs, Molins and Stojanovic introduced the slotted FAMA protocol [11]. In the slotted FAMA protocol, time is slotted and any packet can only be transmitted at the beginning of a slot; it is still using control packets to reserve time slots for data packets. Although the protocol can effectively avoid the problem of hidden terminal, however, it still has some shortcomings. In the slotted FAMA protocol, the length of time slot must be sufficient to ensure that all neighbor nodes can receive control packets in a slot, so that they will know whether transmitting at the beginning of the next slot will interfere with an ongoing transmission. The high propagation delay makes it expensive to exchange Request-To-Send (RTS) and Clear-To-Send (CTS) packets before each data packet transmission. After a complete period of control packets exchanging (two time slots), slotted FAMA only allows one sender-receiver pair access to channel. Therefore, the long slot length requirement and the inefficient handshaking mechanism affect the throughput and end-to-end delay of the UWASNs. Finally, the protocol does not solve the fairness problem.
In order to overcome the above problems, we propose a new MAC protocol with features of efficiency and fair use of network resources for UWASNs and refer to this MAC protocol as MHM (Multiple Handshaking protocol). MHM can achieve higher throughput and better fairness by combining multiple handshaking mechanism and competitive mechanism of control packets. Multiple nodes are allowed to exchange control packets (RTS or CTS) in the same time slot, so the efficiency of the control packet switching is also improved. The multiple handshaking mechanism is development to avoid collisions of data packets. The key idea of this mechanism is to utilize the information of propagation delay to arrange the transmission time of data packets. Receiver can receive multiple data packets in a packet train manner, as long as multiple senders transmit data packets according to the special transmission schedule. In our protocol, after some control packets are exchanged, some nodes may need to receive and transmit data packets at the same time. The objective of competitive mechanism of control packets is to specify the order in which these nodes transmit and receive control packets. In summary, in the phase of control packet switching, the node can transmit and receive multiple control packets. In the phase of data transmission, the node can receive multiple data packets; therefore, MHM can reduce the time during which the control packets occupy the channel, improve the utilization ratio of the channel, and ensure better fairness.
The rest of this paper is organized as follow. Section 2 briefly reviews some related works. In Section 3, we present the MHM protocol. In Section 4, the simulations are carried out. Finally we give our conclusions and further work in Section 5.
2. Related Work
There are several existing competitive access protocols for UWASNs. Some competitive access protocols use the traditional handshaking mechanism, such as MACA, MACAU, and MACAW. However, these protocols cannot effectively solve the hidden terminal and spatial fairness problem caused by high propagation delay in multihop UWASNs. The FAMA protocol be proposed in [12]. It was shown that using a carrier sensing protocol, collision avoidance is guaranteed if the following conditions hold:
In the handshake protocol, transmission of control packets in UWASNs will decrease the channel utilization because of the consideration of high propagation delay; the throughput of UWASNs is usually poor. After a successful handshake, the traditional handshake mechanism (MACA-base or FAMA-base) can only carry on a data packet transmission. The existence of the problem gives rise to the need to design new handshake mechanism; RIPT which is a four-handshaking-based MAC protocol is proposed in [15] to increase the channel utilization of UWASNs. Receivers initiate the 4-way handshake by broadcasting an RTR packet. A receiver broadcasts an RTR control packet to its neighbors. If neighbors have packets to send to this receiver, they can replay the data size in another control packet to the receiver. Finally, the receiver can schedule each transmission and then informs the scheduling results in ORDER control frame. Xun et al. proposed a protocol called ROPA [16]; it can increase the channel utilization by allowing a sender to invite its one-hop neighbors to opportunistically transmit their data packets. After the sender finishes transferring its data packets to the receiver, it can immediately receive the incoming data packets from its neighbors. In [17], they proposed a receiver-initiated MAC protocol with packet train for UWASNs called multireceiver MAC (MR-MAC) protocol. The MR-MAC protocol can make more than two nodes to communicate in one handshake held by a main receiver. By scheduling the packet transmission time, the data packet will be sent in a packet train manner and the receiver can receive data packet without collision. In [18], they proposed a handshake based ordered scheduling MAC (HOSM) protocol. The nodes with data packets to be transmitted first reserve the channel in a channel reservation phase. Then an order list is calculated, and the data packets of these nodes are transmitted according to this order list. They develop control packets transmission adjustment mechanism to reduce collisions of control packets. The key idea of this mechanism is to utilize the information of propagation delay to adjust the time instant of control packets transmitting. The above protocols are too complicated to effectively improve network throughput and need too much control packets, which will influence the network performance.
Some protocols try to improve the network performance by designing a new handshaking mechanism without increasing the number of control packets. Chirdchoo et al. [19] proposed a MACA-based protocol with packet train to multiple neighbors (MACA-MN). It improves the channel utilization by forming a train of packets destined for multiple neighbors during each round of handshake, which can reduces the relative proportion of time wasted due to the propagation delays of control packets. Han et al. proposed the multisession FAMA (M-FAMA) protocol [20]; it allows a sender to open multiple sessions to different receivers achieving temporal/spatial reuse and yet avoiding collisions by careful accounting of neighbors’ transmission schedules. In [21], author presented a MR-SFAMA protocol for UWASNs. Besides adopting the handshake mechanism of slotted FAMA, it uses the multiple receive mechanism, which significantly improves the network throughput and fairness index. However, these protocols only can allow nodes to receive or send multiple packets; they do not allow nodes to be two roles as both the sender and the receiver. Similar to some of the aforementioned protocols, our protocol seeks to improve network performance by reducing the proportion of time spent on control packets. In our protocol, after the receiver finishes receiving its data packets from multiple neighbors, which arrive in a manner of packet train, it can immediately switch its role to transmit data packets to its destination nodes. Therefore, it can achieve better network performance and spatial fairness.
3. MHM Protocol Design
3.1. Motivations and Basic Principles
Although the slotted FAMA and RC-SFAMA protocol are used for alleviating the hidden and exposed terminal problems in UWASNs, they also include two disadvantages when they are applied in UWASNs. Firstly, the need for at least one full round-trip exchange of control packets (RTS-CTS) prior to sending every data packet introduces lager latency, due to the long propagation delay. At the same time, in order to ensure that all hidden terminals can listen to the control packets transmitted by the sender in a time slot, the duration of time slot must be long enough. When the network load is high, if a node receives multiple RTS packets in a slot, the target node in slotted FAMA protocol must enter the back-off state. In the RC-SFAMA protocol, the receiver only can obtain one data packet from one of all potential senders. Therefore, This leads to low utilization of the network. As shown in Figure 1, node 1 is close to node 2 and node 3 is far from node 2. The two simultaneous transmissions of RTS packets from node 1 and node 3 are received separately at node 2 in the slot 1. Although node 2 received two RTS packets, it can only reply CTS packets to one of the senders (node 2) in next slot. Node 3 receives the xCTS (a CTS packet intended for another node) packet from node 2 in the waiting time (current slot and the next one), and it must wait long enough to allow the node 2 to receive the entire data packet and receive the following ACK packet from node 2.
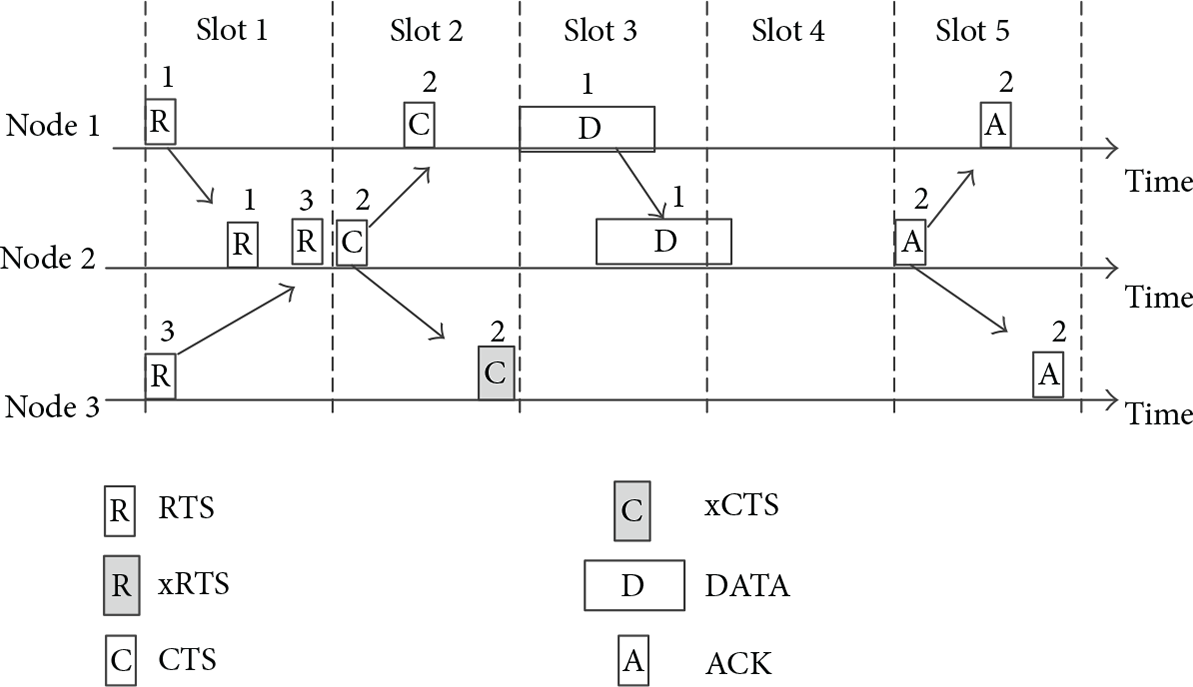
An example of RC-SFAMA.
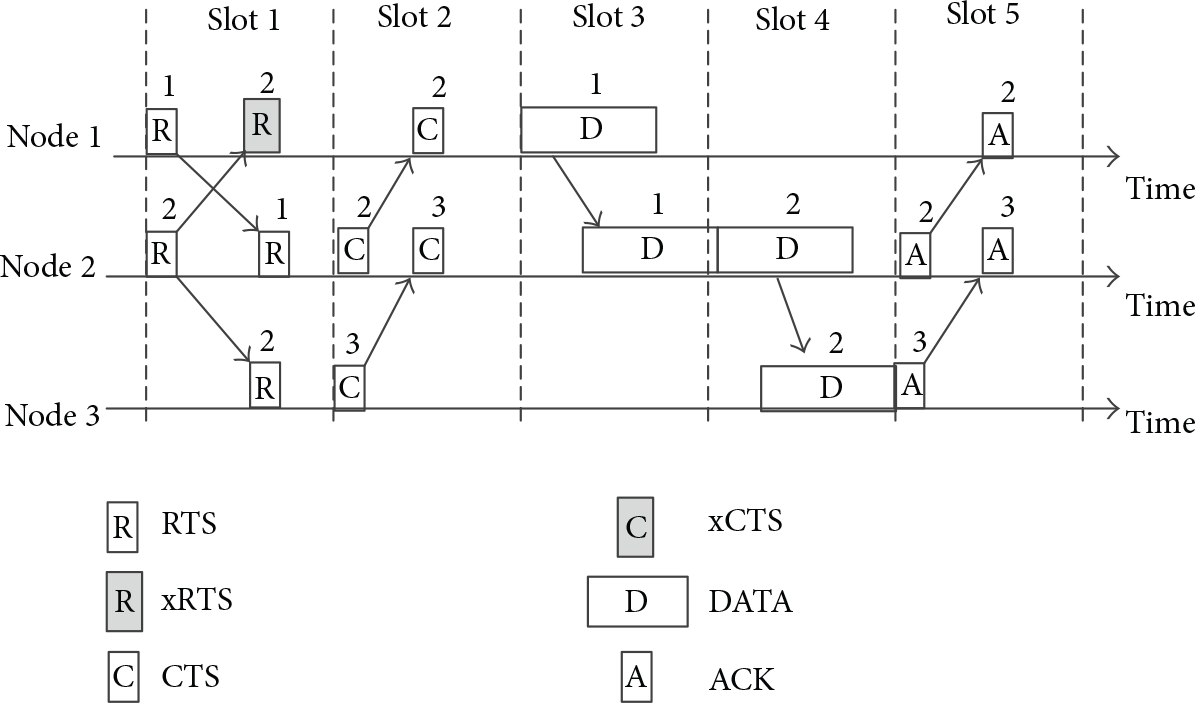
Our protocol allows the receiving node to receive multiple RTS packets in a time slot. At the beginning of the next time slot, the CTS packet from the receiver is sent to all senders by means of broadcasting. MHM protocol leverages the RTS/CTS exchange for learning propagation times between a node and its neighbors. With loose clock synchronization among terminals and a known transmission and propagation time for each data packet (assumed of fixed size), the receiver can know the time of receiving the data packets sent by all potential transmitting nodes. Using the knowledge of transmitting nodes’ propagation time, the receiver can design a collision-free transmission schedule of its own. At last, the receiver broadcasts the transmission schedule to all of the senders by CTS packets. In the case depicted in Figure 2, node 2 receives two RTS packets in the first slot and broadcasts a CTS packet at the beginning of the next slot. According to the transmission order in the CTS packet, node 1 and node 3 send their data packets to node 2 sequentially. Note that node 2 activates two types of handshaking for node 1 and node 3 by broadcasting a CTS packet.

An example of MHM.
In our protocol, we use another mechanism to improve the utilization of the control packets. In the slotted FAMA and RC-SFAMA protocol, the role of a node can only be a sender or receiver. If a sender receives an RTS packet from its neighbor nodes after sending its RTS packet in a time slot, the sender must ignore the RTS packet from other nodes. The reason is that when it sends an RTS packet, its role becomes a sender, so it cannot receive other RTS packets before it completes its data packet transmission. As shown in Figure 3, node 2 has a data packet to be sent to the node 3. However, at the same slot, node 1 also has a data packet to transmit to the node 2, when node 2 receives the RTS packet transmitted by node 1; node 2 neglects the RTS packet from the node 1, because it is communicating with node 3.

An example of RC-SFAMA.
Since the time to send CTS packets is at the beginning of a time slot, a node transmits CTS packets and receives CTS packets which can be performed simultaneously in a time slot without packet collisions. As shown in Figure 4, node 2 can handshake with the other two nodes simultaneously. Node 2 has received the data packet from node 1; then it sends its data packet to node 3 immediately. Using this mechanism, node 3 can receive and send data packets after one handshaking time. Based on the above two mechanisms, our protocol can improve the success rate of control packet switching and then improve the performance of the network.
An example of MHM.
Another shortcoming of the RC-SFAMA protocol is the fairness problem. The mechanism of RTS packets competition makes it essential to also consider the fairness all potential senders. Since a node's a competing number is obtained by random number generation, the channel becomes clear earlier when the node has small random number. Let us look back at Figure 1; node 1 and node 3 transmit simultaneously an RTS packet to node 2. Because the random number of node 3 is greater than the node 1, the node 1 has a greater chance to handshake with node 1 than node 3, and this advantage will be maintained. Figure 2 shows an opposite example; in the MHM protocol, node 1 and node 3 can send data packets in the same slot; MHM does not find any factors that would affect the probability of access channel. Therefore, our protocol can improve the fairness of channel access and ensure that the network has long survival life.
3.2. UWASNS Model
MHM is a kind of access protocol based on time slot, and it requires the node position in the network to be fixed. Therefore, this paper assumes that network model has these following properties: The network topology can be a single-hop or multihop topology; and all nodes are placed in a random manner in a network area. Each node acts independently from the others and sends data packets following Poisson distribution. Nodes can randomly select any node as the destination. There are synchronization requirements between all nodes. Nodes work on half-duplex model, and nodes’ location is fixed. The optimal routing path is chosen as the one with the fewest number of hops.
3.3. MHM Protocol
The MHM protocol focuses on static networks; we assume that all nodes’ clocks are synchronized and any clock drift would still be negligible. Under this assumption, each static node can know the propagation delay between it and its neighbor nodes in the initialization phase. In fact, the propagation delay can be estimated by a handshake between the nodes [9].
Similar to the widely known FAMA protocol, our protocol also employs a four-way handshake (RTS/CTS/DATA/ACK). When a node has data packets to transmit, it sends an RTS packet at the beginning of the next slot and wait the CTS packet from the receiver. Each node can only transmit an RTS packet in a single transmission cycle. When a node receives an RTS packet, it continues listening channel until the end of the current slot. If the node overhears other RTS packets during the listening time, it also receives those RTS packets. In the next time slot, note that there is an important modification on how the receiving node should respond with its CTS packets compared with the slotted FAMA and RC-SFAMA protocol, because our protocol needs to handle more than one RTS packet from multiple senders. The receiving node has two ways to reply the CTS packet. If the receiving node has received only one RTS packet in the previous slot, it replies a CTS packet to the sending node at the beginning of current slot. In contrast, if the receiving node has received multiple RTS packets in the previous slot, it broadcasts a CTS packet to a plurality of sending nodes at the beginning of current slot. As shown in Figure 5, node 1 and node 3 are neighbor nodes of node 2, node 3 is hidden from node 1, and node 4 is a neighbor node of node 1. At the beginning of the first slot, nodes 1, 2, and 3 simultaneously transmit an RTS packet. Node 2 receives two RTS packets in the first slot; then it broadcasts a CTS packet to node 1 and node 3 in the next slot, which includes a transmission schedule of data packets for all senders (node 1 and node 3). In the same slot, node 2 also received a CTS control packet from node 1.
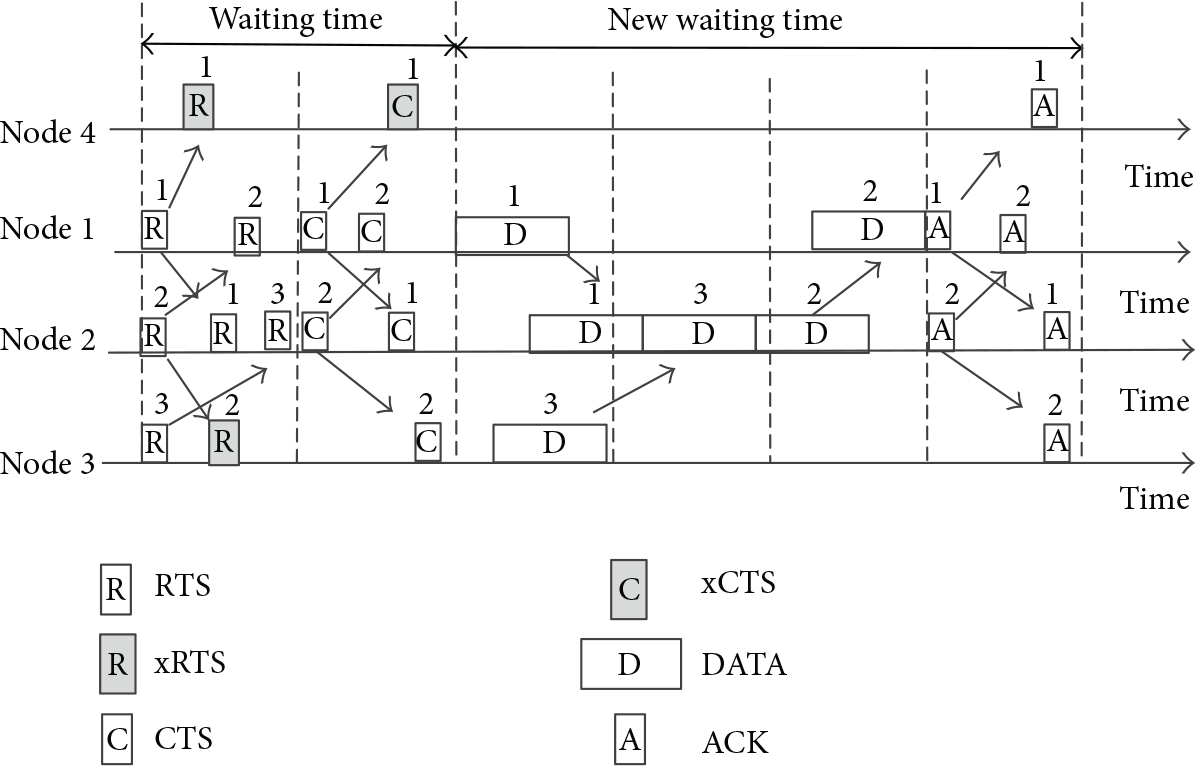
The procedures of MHM protocol.
In the third slot, there are three nodes that want to send data packets. In order to avoid packet collisions, we introduce a competitive mechanism of control packets, which will be further discussed in Section 3.5. Using this mechanism, all nodes know the order of sending data packets. In the example shown in Figure 5, node 1 and node 3 send their data packets following the transmission schedule in the third slot. Node 1 sends a data packet directly in the next slot time, and node 3 must wait for a period of time to send its data packet. This transmission schedule is to ensure that node 2 can receive two data packets without collision, which will be further discussed in Section 3.4. When node 2 has received data packets, it sends its data packet to node 1. At last, node 2 broadcasts an ACK packet in the next time slot. If node 1 and node 3 have received the ACK packet, they know that the data transmission is successful.
If a node receives an xRTS packet (an RTS packet intended for another node) in the idle state, it must wait two slots. If after this time no carrier is sensed, the node returns to the idle state. Different from the slotted FAMA and RC-SFAMA protocol, if the CTS packet sent by the neighbor node is received during the waiting period, the node should receive the CTS packet and transmit its data packet in the following slot. After receiving an xCTS packet the node must wait long enough to allow other nodes to transmit the entire data packet and receive the corresponding ACK packet. Let us look back at Figure 5, when node 4 overhears the xRTS packet transmitted by node 1, it must wait two slots (current slot and the next one). If during this waiting time no control packets are received, node 4 returns to the idle state. However, node 4 receives the xCTS packet transmitted by node 1 during second slot; it must reset its waiting time to allow node 1 to receive data packets. The waiting time must be long enough to allow the reception of the subsequent ACK packet. After hearing the ACK packet from node 1, node 4 can return to the idle state since the data transmission has successfully ended. Node 3 receives an xRTS packet in the first slot, and then it enters the waiting state, but it receives a CTS packet from the node 2 in the second slot; then node 1 must be out of the waiting state and ready to transmit its data packets to node 2.
3.4. Multiple Handshaking Mechanism
As mentioned above, when using the handshake protocol, the high propagation delays can reduce the throughput and increase end-to-end delay of networks. However, long propagation delay also provides an opportunity to transmit or receive multiple packets at the same slot. In our protocol, when the receiving node receives several RTS packets from different senders in a slot, it is allowed to broadcast a CTS packet to all senders at the next slot. After a control packet switching cycle, the receiving node can receive a plurality of data packets. This mechanism makes it possible to transmit multiple data packets at the end of the time for one full round-trip exchange of control packets. The rule of thumb here is that senders will transmit those data packets at the beginning of the next slot upon receiving the CTS packet, subject to the condition that those data packets will not result in data packet collisions at the receiver. If the difference between the propagation delay of senders and the receiver is less than the transmission time of a data packet, data packet collisions may occur at the receiver. In our protocol, we use a transmission schedule to avoid the occurrence of the above. When a receiver calculates and learns that if all senders transmit data packets at the beginning of time slot this will cause data packet collisions, it will design a transmission schedule and send the schedule to all senders via a CTS packet. Having resolved the time to transmit its data packet, each sender can transmit data packets in accordance with the schedule. Therefore, the core of this mechanism is how to design a suitable transmission schedule.
Next, let us introduce how the receiving node computes a data transmission schedule. If a receiving node r receives multiple RTS packets, using the internode propagation delay information provided by the initialization phase, it can calculate and arrange the time for all senders to send its data packets. The sequence of senders transmitting packets is determined by the distance between them and the receiver. If a sender is close to the receiver, it can transmit data packets at an earlier time. Otherwise, it needs to wait for a period of time to send data packets. Let

3.5. Competitive Mechanism of Control Packets
After a switching period of control packets, the MHM protocol allows some nodes to transmit or receive data packets in subsequent time slots. How to arrange the order of nodes to transmit and receive data packets is essential. In our protocol, we use a mechanism to solve the above problem; we call it competitive mechanism of control packets.
In the MHM protocol, we add an CTS competition mechanism to all sending or receiving nodes. When a node wants to send a CTS packet, it adds a random number into the CTS packet. Then the node sends the CTS packet with the random number at the beginning of current slot. In this way, each CTS packet will have a random number within it. When network traffic is large, for some senders, it sends a CTS packet at the beginning of a time slot, while it also may receive a CTS packet sent by other nodes in the same time slot. The sender makes its own random number compete with the random number of the received CTS packets. If the random number of the senders is relatively large, in the following time slot, it will send its data packet first and then wait to receive the data packet from neighboring nodes. As shown in Figure 6, the random number of node 2 is larger than node 1; therefore node 2 sends its data packet to node 1 after exchanging of control packets, and node 1 can only send its data packet after receiving the data packet from node 2.

An example of competitive mechanism of control packets.
However, there is still a special case in our protocol. When two nodes transmit CTS packets between each other, if one node receives CTS packets sent by broadcast manner, it does not require random number comparison, because the level of CTS packets sent by broadcast manner is higher than the general CTS packets. The reason is that a broadcast packet can communicate with multiple sending nodes at the same time, so the authority is the highest. As shown in Figure 5, node 1 receives a CTS broadcast packet, and then it must send data packets to node 2 before receiving data packets from node 2.
3.6. Throughput Analysis
Let us assume that our analytical model consists of a single receiving node x and N neighbor nodes. Neighbor nodes are randomly distributed around the receiving node x. Because the transmission time of RTS packets is far less than the internode propagation delay between neighbor nodes and receiver, the collision probability of RTS packets is very small. In our model, we assume that the receiver can receive all the RTS packets in a time slot without collision. Each node has a packet ready to send every
Let us define

Similarly, in the RC-SFAMA protocol, the probability of no collisions is the probability that node ω sends an RTS and wins the RTS competition if the contenders of node ω also send RTS packets in the same slot. Therefore,

In our protocol, we use the multiple handshaking mechanism to solve the problem of RTS packets competition; there is no relationship between the

Next, we estimates the throughput of MHM in the above network model. In this network model, we assume that all neighbor nodes have a data packet sent to node x in a given time

Denoting by

Figure 1 describes a complete handshake process and

The duration of the network operation time is determined according to the access method of the protocol. In slotted FAMA and RC-SFAMA protocol, when a control packet switching is completed, only one node can send its data packet, so their network operation times are

In the MHM protocol, the multiple handshaking mechanism makes it possible to transmit multiple data packets at the end of the time for one full round-trip exchange of control packets. Therefore the operation time of network is given by

In this situation, the theoretical throughput of MHM is

Linking all the parts, our protocol shows better performance than the other two protocols in throughput. This equation is valid for a static single-hop network.
4. Simulation Results
4.1. Simulation Settings
In our simulation, a multihop network is investigated. The simulation parameters are as follows: we simulate a random network where several underwater acoustic sensor nodes are uniformly distributed in a square area with the side of 10 km. A sending node randomly chooses another node in the network as the destination. Each node can only transmit a packet in a packet transmission cycle. We model packets traffic as a Poisson arrival process. Data packets are generated at each node in accordance with Poisson distribution. The bandwidth of the channel is set to 1 kbps and the rate of data transmission is 1 kbps. The transmission range of every node is set to be 1500 m. The propagation speed of acoustic signal in underwater environment is about 1500 m/s. The channel is also assumed to be error-free, so that all packet losses are purely due to the MAC protocol's performance. The data packet size is set to 256 bits, and all control packets (RTS, CTS, and ACK) are set to 16 bits. All acoustic modems are used in half-duplex mode.
We carry out these simulations in the OPNET simulator. To validate the performance of our protocol, in this simulation scenario, all the nodes are stationary once deployed. We compare our protocol with three previously proposed protocols, namely, slotted ALOHA, slotted FAMA, and RC-SFAMA. Note that all the protocols in our simulation study require time synchronization. In the process of simulation, we assume that all nodes in the network can keep accurate time synchronization.
4.2. Simulation Results
For a better understanding of our protocol's performance, we use four metrics as our performance measure as follows.
4.2.1. Throughput
Figure 7 shows that our protocol always outperforms other protocols significantly, while being able to maintain a high throughput in heavy load network environment. When the network load is low, the slotted ALOHA protocol can achieve higher maximum throughput than other protocols. Because of the lack of an effective mechanism to avoid the collisions of data packets, the throughput of slotted ALOHA actually decreases as the network load increases. However, handshaking-based protocols could help reduce collisions in UWASNs by alleviating the hidden terminal problem; they maintain stable throughput as the offered load increases. As expected, slotted FAMA is very inefficient because of the relatively long time slot and low efficiency of its handshake mechanism. RC-SFAMA introduces an RTS competition mechanism to overcome the problem of multiple RTS packet attempts. Via the RTS competition mechanism, RC-SFAMA protocol has higher throughput than the slotted FAMA protocol. However, with the increase of the offered load, in these two protocols, they restrict channel access to only one sender-receiver pair during a slot time. Nodes only transmit or receive a single data packet after each handshake, which leads to a very low utilization rate of the channel when the propagation delay is high.

Throughput versus offered load.
The MHM protocol superior performance over other three protocols is due to the multiple handshaking mechanism and competitive mechanism of CTS. It allows the receiving node receive multiple RTS packets within one cycle of control packets exchanging. Consequently, all intended sending nodes may transmit their data packets to the receiver without packet collisions. After exchanging of control packets, our protocol allows nodes to receive and transmit packets at the following time slot. Therefore, the two mechanisms described above can improve the utilization rate of control packets and thus improve the network throughput. When the network throughput is small, the throughput of slotted FAMA, RC-SFAMA, and MHM protocol is very close. This phenomenon is mainly caused by the following reasons. The probability of sending and receiving RTS in the same slot is relatively small. Therefore, the possibility of receiving node receives multiple RTS packets in a time slot relatively low. As the network offered load increases, the method of multiple handshaking and competitive mechanism of control packets can reduce the total channel reservation overhead greatly and thus can improve channel utilization.
4.2.2. The Ratio of RTS/DATA
The ratio of RTS/DATA was used to evaluate the throughput performance of our protocol in simulation. This ratio represents the average number of RTS packets to be sent before a successful transmission of a data packet. If the ratio is relatively small, the probability of successful control packets switching is relatively large. In this case, the time during which the control packets occupy channel is reduced, and the channel utilization will be improved. Figure 8 shows the ratio of slotted FAMA, RC-SFAMA, and MHM as a function of offered load. Slotted ALOHA protocol does not require a handshake of control packets before transmission of data packets; therefore the simulation experiment will not consider this protocol.

RTS/DATA ratio versus offered load.
At the lower offered load, the RTS packets are successfully received by the high probability. As offered load increases, more and more nodes listen to multiple RTS packets or xRTS packets; in the slotted FAMA protocol, nodes cannot reply CTS packets to these RTS packets, so the ratio of RTS/DATA will always be increased. In contrast, the RC-SFAMA protocol maintain relatively low RTS/DATA ratio as the offered load increases. The result can be explained by the efficient handshaking mechanism of RC-SFAMA protocol. The problem that a node cannot receive multiple RTS packets within a time slot at higher offered load is eliminated by the RTS competition mechanism. However, only the node which wins the RTS competition can send data packets, and the RTS packets sent by other nodes will be invalid. MHM uses the multiple handshaking mechanism to solve the above problem. The receiver can handshake with all potential senders simultaneously; therefore, MHM achieves a better performance in the ratio of RTS/DATA.
4.2.3. Fairness
Fairness is a key performance of MAC protocol, which affects the normal operation and survival time of UWASNs. To evaluate the fairness of our protocol, we adopt the Jain Fairness Index define in [22]:
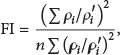
Figure 9 shows the fairness index of four protocols. With the increase of offered load, the fairness index of the slotted ALOHA, slotted FAMA, and RC-SFAMA is declining. This is because the back-off algorithm they used will cause unfair. In addition to the above reasons, in slotted ALOHA, due to the large delay of underwater acoustic network, the distance between nodes becomes a key factor in the competitive channel. In RC-SFAMA, the RTS competition mechanism also introduces the unfairness of node access channel. We discover that the MHM protocol has the best fairness performance. This is explained by the fact that multiple handshaking mechanism can improve the fairness index. It guarantee that a sender who is farther from the receiver has equal chance of capturing the channel.
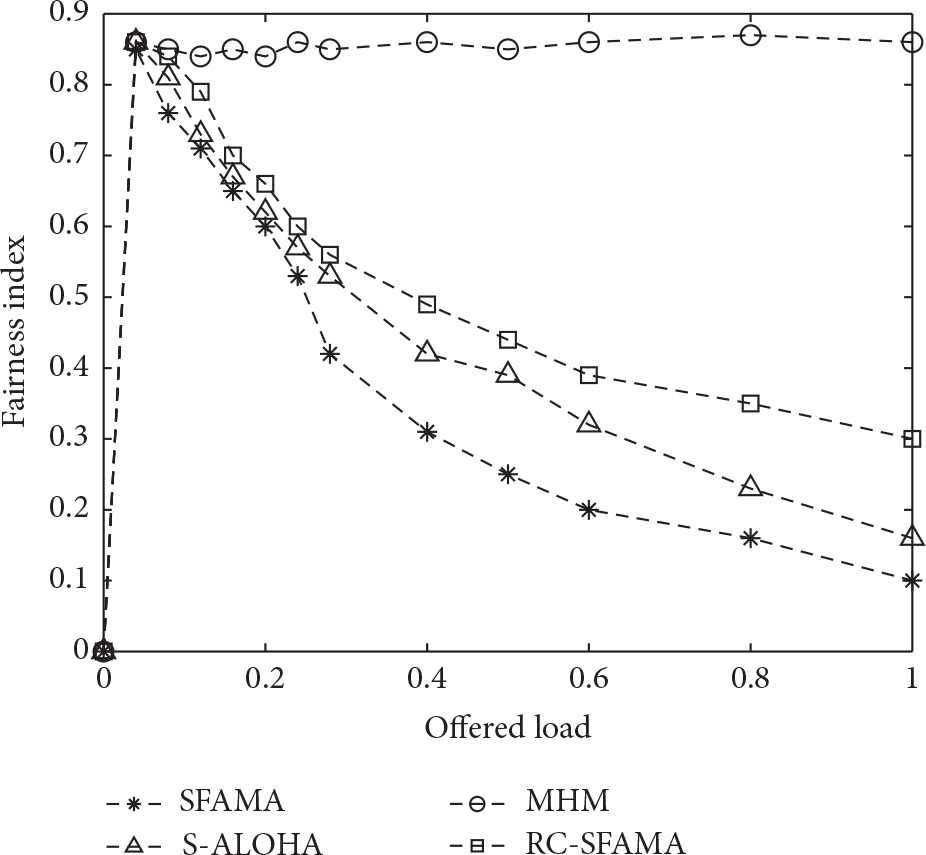
Fairness index versus offered load.
4.2.4. Average Delay
In Figure 10, we compare the average transmit delay of data packets. At low offered load, slotted ALOHA has the best delay performance. This is because it does not need to exchange control packets before transmitting DATA packets. However, with the increase of offered load, slotted ALOHA has the highest delay because it has no effective mechanism to avoid data packet collisions. The RC-SFAMA protocol is better than slotted FAMA protocol in the performance of average delay. This is because in the case of RTS packets competition, RC-SFAMA can work normally. At high offered load, our protocol's average delay becomes smaller than slotted FAMA and RC-SFAMA. This is the point where the multiple handshaking mechanism can overcome the overheads incurred by 4-way handshake. Our protocol can use the mechanism more efficiently by sending and receiving multiple data packets in a transmission cycle.

Average delay versus offered load.
5. Conclusions and Further Work
The long propagation delay of underwater acoustic channel is inevitable, and it has great influence on the performance of handshaking MAC protocols in UWASNs. We have presented the MHM protocol, which is a random access handshaking-based protocol. It is shown that, by using multiple handshake and competitive mechanism of control packets, the MHM protocol can addresses the channel's long propagation delay characteristic. The simulation results have confirmed that our protocol can achieve better performance than two other MAC protocols. Future work will mainly focus on the design of a new back-off algorithm; the main goal is to reduce the node's back-off time and improve the fairness during the network which is under high level load.
Footnotes
Competing Interests
The authors declare that there are no competing interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by the Science Foundation for Youths of Fujian Province (Grant no. 2016J05160), by the Natural Science Foundation of China (Grant no. 61501386), and by the Start-Up Foundation for Talent Introduction of Minjiang University (Grant no. MJY15001).