
Abstract
A noncoherent low-frequency ultrasonic (LFU) communication system is proposed for near-field communication using commercial off-the-shelf (COTS) speakers and microphones. Since the LFU communication channel is known to be a frequency-selective characteristic, the proposed system is basically designed by differential phase-shift keying (DPSK) modulation with forward error correction. In addition, automatic gain control of the carrier frequency band over the LFU communication channel is proposed. Then, in order to optimize the symbol length of the proposed LFU communication system under a realistic aerial acoustic channel, a propagation model of the LFU communication channel is proposed by incorporating aerial acoustic attenuation. The performance of the proposed LFU communication system is demonstrated on two different tasks: bit error rate (BER) measurement and successful transmission rate (STR) comparison with Google Tone for various distances between the transmitter and the receiver. Consequently, the proposed method can operate without a bit error at a distance of 8 m under various noise conditions with sound pressure level of 80 dB. Moreover, the proposed method achieves higher STR than Google Tone on a task of URL transmission using two laptops.
1. Introduction
Nowadays, everyday devices are evolving to have connectivity owing to the advancement of short-range wireless communication technology, such as near-field communication (NFC) [1] and Bluetooth low energy (BLE) [2]. Both NFC and BLE have been successfully applied to short-range communication-based services, including electronic payment or location-based advertisement via smartphones. However, compatibility issues exist in NFC and BLE, since they require corresponding hardware transceiver modules, which are rarely embedded in most devices except recent smartphones or tablets. For this reason, alternative short-range communication technology that does not rely on a hardware transceiver is in demand for the improved connectivity between various devices. Considering the improved connectivity of short-range wireless communication, acoustic communication can be a suitable alternative to the conventional systems, since acoustic communication transmits and receives data through a speaker and a microphone, which are typically implemented or easily attached to most digital devices.
Acoustic communication can be separated into underwater and aerial acoustic communication. First, underwater acoustic communication has been developed for autonomous underwater vehicles, such as submarines or underwater sensors, in order to monitor marine ecosystems or underwater military action [3, 4]. Since underwater acoustic communication delivers sound waves through water, it requires a special form of microphone and speaker that operate underwater (i.e., hydrophones and underwater speakers). In contrast to underwater acoustic communication, aerial acoustic communication utilizes airborne sound waves to transmit or receive data [5–8]. The operation frequency for aerial acoustic communication can be included in an audible range (50 Hz–18 kHz) [6–8] or within a low-frequency ultrasonic (LFU) range (above 18 kHz) [5, 8], which can be covered by commercial off-the-shelf (COTS) speakers and microphones. In other words, aerial acoustic communication can be applied to any audio interface-equipped devices without consideration of the type of hardware or operating system. For this reason, aerial acoustic communication is compatible with most devices with either a speaker or a microphone, and such a characteristic is highly favorable for short-range wireless communication that requires connectivity between various devices.
Recently developed aerial acoustic communications can be categorized into acoustic communication with data hiding and LFU communication followed by their data transmission channels, which are the audible frequency channel (50 Hz–18 kHz) and LFU channel (above 18 kHz), respectively. Owing to the fact that the audible frequency channel is much less frequency-selective than the inaudible one, higher communication performance in terms of bandwidth capacity can be expected compared with LFU communication [6, 7]. However, modulation signals that have carrier frequencies within the audible frequency band can be perceived as disturbing noise to users who are in the communication zone. To avoid such unwanted noise, the data carrier signals need to be masked with audio signals through data hiding techniques based on acoustic orthogonal frequency division multiplexing (AOFDM) or modulated complex lapped transform (MCLT) [6, 7]. In contrast, LFU communication has a vital advantage over audible frequency channel-based communication, since it does not require data hiding techniques and its modulated signals with the LFU band are barely noticeable even with excessive loudness [5]. Nonetheless, the LFU channel is considered a highly frequency-selective channel because most COTS microphones and speakers have severely selective frequency response over 21 kHz [5]. Thus, LFU communication requires a careful modulation scheme to cope with the limited performance.
Some LFU communication systems have been developed to meet their own communication performance considering COTS microphones and speakers. First, an amplitude shift keying- (ASK-) based LFU communication system, which was named Sonicom, was introduced as a concept of a wireless dial-up modem [8]. Sonicom simply modulated binary 1 into a sinusoid with the carrier frequency of 18.3 kHz with a certain energy level or just sent silence for binary 0. In addition, a preamble was attached prior to a data sequence to synchronize the transmitter with the receiver using a matched filter. The transmission speed of Sonicom was 1.47 kbps, which was satisfactory for applications regarding short-range communication, such as sending the uniform resource locator (URL) of a web page or the service set identifier (SSID) of Wi-Fi. However, Sonicom was highly vulnerable to attenuation and channel noise because both synchronization and modulation relied on the energy level of the sinusoids at a certain carrier frequency; thus, its maximum transmission range was limited to 2 m. To improve the robustness of LFU communication, a recent approach applied chirp signal as a modulation symbol. Specifically, the chirp signal-based LFU communication utilized the LFU band of 19.5–22.2 kHz to generate a single chirp symbol, where binary 1 was represented with increasing carrier frequencies and binary 0 was with decreasing ones. The preamble consisted of up and down chirp symbols and it was then attached prior to a data sequence. In addition, both synchronization and demodulation were conducted by matched filtering using the fast Fourier transform (FFT). Owing to the good autocorrelation characteristics of the chirp symbol, the chirp signal-based communication system could transmit data up to 25 m in a realistic indoor environment, but its transmission speed was measured as 16 bps [5]. Such an exceedingly slow speed was due to the poor modulation efficiency of the chirp symbol in terms of both time and frequency. Therefore, further improvement of the LFU communication system is required to support robust data transmission in a realistic indoor environment with an acceptable speed and communication range.
Recently, Google released an end-user service named “Google Tone,” which broadcasted URLs from a device to others using the LFU communication method [9]. Owing to the attenuation of LFU through typical building barriers such as walls, doors, and windows, Google Tone can easily share URLs between devices located in the same room without manual exchange of password for connecting a common network through Wi-Fi or Bluetooth [10]. Such connection between near devices can be vastly utilized not only for data sharing, but also for home automation [10] or indoor positioning systems [11], if the LFU communication performance would be reliable according to various characteristics of COTS microphones and speakers as well as operating environments.
In this paper, a noncoherent LFU communication system is proposed for near-field communication using COTS microphones and speakers. The proposed system is based on a noncoherent communication framework without using the synchronization that often fails to perform under the highly frequency-selective channel [12]. This is because the LFU channel is highly frequency-selective, caused by the limited performance of COTS microphones and speakers in realistic noisy environments. Owing to the noncoherent framework, the proposed system simply consists of forward error correction (FEC), modulation, and automatic gain control (AGC) modules. To be specific, the perfect binary Golay code, which has the capability of 3-bit error correction and 7-bit error detection [13], is applied as the FEC module. Moreover, differential phase-shift keying (DPSK) modulation/demodulation is used for the transmission and detection of the symbol in a noncoherent way. Finally, AGC is applied to both the modulation and the demodulation to make the proposed system robust against the noisy and frequency-selective channel. In addition, a propagation model for the LFU channel is defined and utilized to find the optimum symbol length of the proposed system.
The rest of this paper is organized as follows. Following this introduction, Section 2 proposes a DSPK-based noncoherent LFU communication system. Next, Section 3 defines a propagation model of the LFU channel in order to find the optimum symbol length of the proposed LFU communication system. Section 4 evaluates the performance of the proposed system and compares it with Google Tone. Finally, the paper is concluded in Section 5.
2. The Proposed Noncoherent LFU Communication
In this section, the noncoherent LFU communication system is proposed for robust communication with COTS microphones and speakers in a noisy environment. Figure 1 shows the proposed noncoherent LFU communication system that is composed of the LFU transmitter and the LFU receiver.

Overview of the proposed noncoherent LFU communication system.
2.1. LFU Transmitter
The proposed system transmits binary data through the LFU wave with three processing steps, which are FEC encoding, DPSK modulation, and the AGC of the carrier frequency band. To this end, P binary bits to be transmitted at the ith symbol are grouped as
After the FEC encoding is completed, each encoded bit of



Followed by the modulation, gain normalization of the carrier frequency band is conducted. First, since



2.2. LFU Receiver
In the LFU receiver, the input signal recorded by the COTS microphone,



3. Optimization of the Proposed LFU Communication System with Aerial Acoustic Attenuation
This section describes how to optimize the proposed system by incorporating the propagation model. In this work, the propagation model of the LFU channel is defined by using aerial acoustic attenuation and background noise. The following subsections discuss the propagation model and the optimization procedure in detail.
3.1. Aerial Acoustic Attenuation Model of LFU Channel
The propagation channel at the kth frequency bin for the proposed system,

3.2. Symbol Length Optimization Incorporating Attenuation Model
This subsection discusses a strategy for finding the optimum



4. Performance Evaluation
In order to evaluate the performance of the proposed LFU communication system, a BER and a successful transmission rate (STR) were measured. In particular, the BERs for different aerial acoustic channels were measured by varying the distance, d, and noise,
4.1. Selection of Optimum Symbol Length
In order to select the optimum symbol length,

BER according to the symbol length under an office noise condition.
4.2. BER Performance
In order to measure BER performance of the proposed system, 50 randomly chosen characters were first encoded by the LFU transmitter with
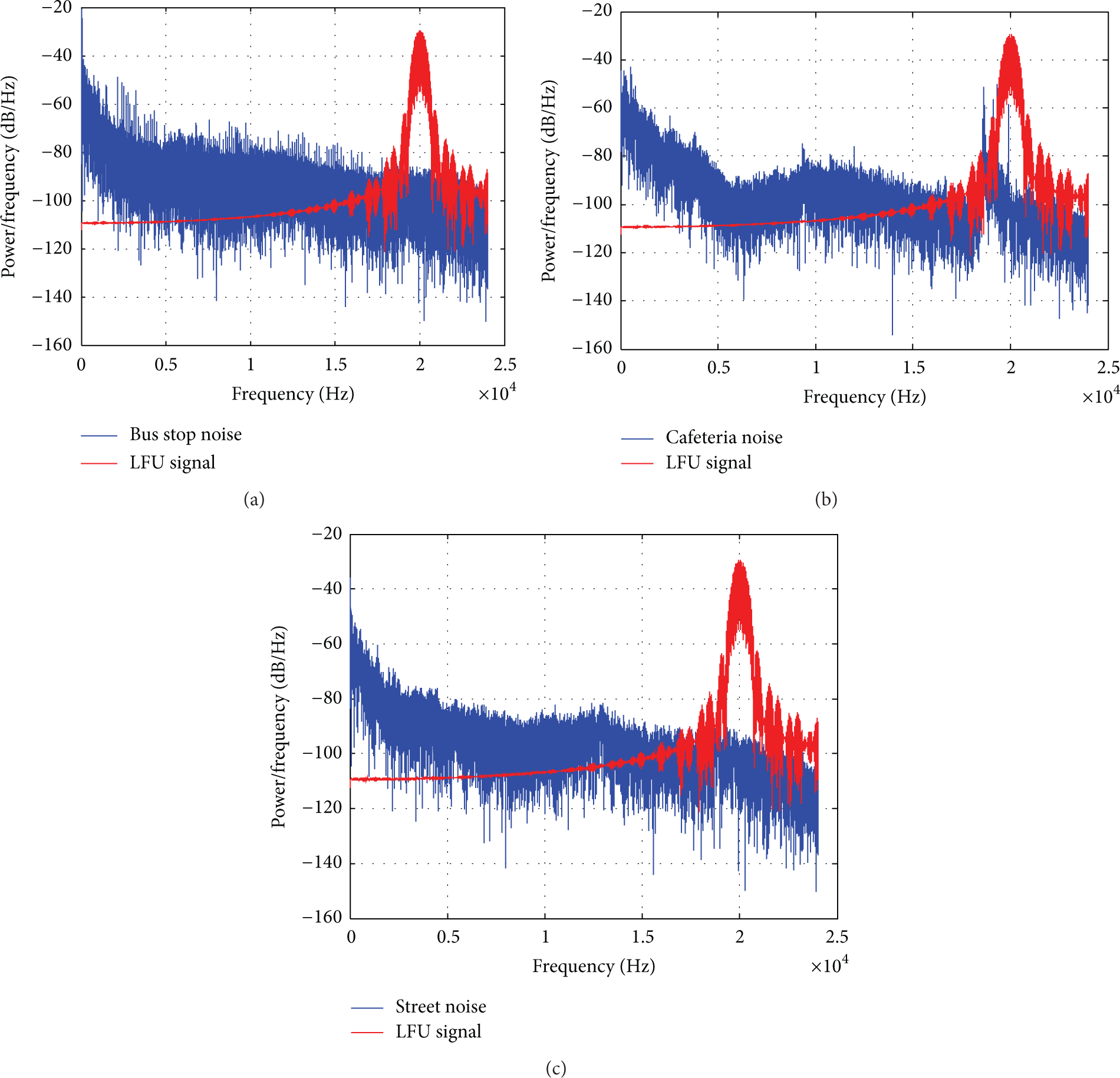
Power spectral densities of LFU signal under three different noise conditions: (a) bus stop, (b) cafeteria, and (c) street.
Next, the received signal was decoded back by the LFU receiver, and the BER was measured by comparing the URLs at the transmitter with those at the receiver. Note that, for a given noise and distance, 20 times of LFU communications were repeated to get a statistically reliable BER. Figure 4 shows the BER according to the distance under three different noise conditions. As shown in the figure, the BER went higher as the distance was longer, as we expected. However, the BER was lower than 10−4 until the distance was shorter than 8, 10, and 12, for bus stop, cafeteria, and street noise, respectively. This implies that the proposed LFU system can be used for transmission in a room area network.

BER according to the distance under three different noise conditions.
4.3. STR Comparison with Google Tone
The performance of the proposed LFU communication system was compared with that of a state-of-the-art system, Google Tone [9]. In this experiment, two laptops having both embedded microphone and speaker (Dell XPS 15 9550 and Dell Inspiron 15 7559) were placed in a meeting room with distances of 1, 2, and 4 m. Next, 100 different URLs were sent from one laptop to the other at each distance by using Google Tone and the proposed system. While sending the URLs, the number of successful transmissions was counted. This experiment was performed under office and TV noise condition to observe the effect of background noise on the STR of Google Tone and the proposed system. Here, TV noise was generated by playing video contents through a TV speaker in the meeting room with three different SPLs of 60, 70, and 80 dB.
Figure 5 compares the STR of the proposed LFU communication system with that of Google Tone under office and TV noise condition, where the distance was set to 1, 2, and 4 m. As shown in the figure, the proposed system had higher STR than Google Tone for all the noise conditions and the three distances. Specifically, both Google Tone and the proposed system had similar STRs at 1 m for office and all the TV noise conditions. In addition, the STR of Google Tone was drastically lowered at 2 m for TV noise conditions, whereas the STR reduction of the proposed system was marginal at 2 m, compared to that at 1 m. However, both STRs of Google Tone and the proposed method were pretty low at 4 m. This was because the frequency response of the microphone and/or speaker inside the laptops was frequency-selective.

Comparison of STRs between (a) Google Tone and (b) the proposed LFU communication system implemented in a meeting room under office and TV noise condition with three different SPLs, where the distance was set to 1, 2, and 4 m.
5. Conclusion
This paper proposed a noncoherent LFU communication system for short-range communication with COTS microphones and speakers. The proposed system consisted of FEC coding, windowed DPSK modulation, and gain normalization of the carrier frequency band in order to make the proposed system robust over the LFU channel. In particular, a propagation model of the LFU channel was proposed by incorporating aerial acoustic attenuation, and it was used for symbol length optimization. The BER performance of the proposed LFU communication system was measured according to the distance under different noise conditions. As a result, the proposed LFU communication system could operate up to around 8 m without bit error even at high ambient noise of 80 dB or above. Finally, the STR performance of the proposed system was compared with that of Google Tone. Consequently, it was shown that the proposed system achieved higher STR on a task of URL transmission under TV noise conditions.
Footnotes
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
This work was supported in part by the National Research Foundation of Korea (NRF) grant funded by the Government of Korea (MSIP) (no. 2015R1A2A1A05001687).