
Abstract
A sparsity-based approach for the joint optimization of the transmit and the receive nodes positions in the radar network with widely distributed antennas is proposed in this paper. The optimization problem is formulated as minimization of the number of radars that meet fixed target localization requirements over the surveillance area. We demonstrated that this type of the problem is different from the problem of the monostatic radar network topology optimization and implies the bilinear matrix inequality (BMI) problem. To tackle it, we propose to use the relaxation technique, which allows for joint selection of the positions for transmit and receive radar nodes. Provided numerical analysis shows that, in order to satisfy the same requirements to the target localization accuracy, the radar network with bistatic radars requires less number of the nodes than the one with monostatic radars.
1. Introduction
The variety of applications of the radar (sensor) networks is constantly increasing in both civil and military domains. Such applications include homeland security and border control, environmental monitoring, and patient monitoring to list a few [1–3]. Availability of low-cost radars with wide-beam/omnidirectional antennas provides opportunity to estimate the target state vector over wide surveillance area using joint processing of data from widely distributed radar nodes. The spatial diversity of the radars allows for better resolution, higher detectability, and fault tolerance compared to a single conventional monostatic radar [4]. The costs of the system design, delivery, maintenance, and operation are lower for the radar networks as well.
Within a wide spectrum of the radar networks, particular systems differ from each other by (i) the way of radar interaction with the target of interest (active way, passive way, or combination of both), (ii) the level of the spatial coherency (nodes can be mutually coherent, with short time coherency, and noncoherent), (iii) the method of the information fusion from individual radar nodes (fusion of radio frequency signals, video signals, individual targets' detections and parameters measurements, and tracks), (iv) the level of autonomy in the signal reception and processing (autonomous level, cooperative level, or combination of both), and (v) the radar nodes architecture (monostatic radars, bistatic radars, or combination of both). These features and the parameters of the single radar define overall system performance [5]. For example, the network of multistatic radars with cooperative mode provides comparable estimation accuracy to the network of monostatic radars with autonomous reception mode, using two times less transmit/receive channels.
The topology of the radar nodes affects the system performance as well. For example, the target localization accuracy of the radar network is affected by the ranging errors of each radar [6]. In Global Positioning Systems, where the ranging errors of the different satellites are the same, this effect can be described with the Geometric Dilution of Precision (GDOP) factor. The GDOP is defined as a ratio of the localization error to the ranging error, which is the same for all satellites. In the network of radars, where the ranging accuracy will be different for each radar node, this effect is described with the Cramér-Rao Lower Bound (CRLB). In both systems, the best estimation can be achieved with symmetrical and balanced topology of the sensing nodes [7, 8].
However, in most of the applications, the available locations for the radar nodes are limited due to several reasons, such as the system cost, the availability of communication links and their data rates, and the existing infrastructure. Therefore, one of the key issues of the effective exploitation of radar networks is providing optimal topology of the radar nodes in terms of (minimum) estimation error. In general, this problem can be formulated in two ways: (i) to find the minimum number of the radar nodes positions that guarantee predefined target localization accuracy and (ii) to find optimal positions for a fixed number of the radar nodes such that the target localization error is minimal.
The problem of the optimization of nodes positions of the sensor networks has been studied in the recent decades in both radar and communication fields [9–11]. In particular, the developed state-of-the-art techniques that are based on convex, greedy, and heuristic optimization can be exploited for different types of monostatic sensors [10–12]. Some of these techniques can be modified for the radar networks that use signals from transmitters of opportunity (passive bistatic radars (PBR)) [12, 13]. To the authors' knowledge, there is no work dedicated to the joint position optimization of the transmit and receive radar nodes in the radar networks that use dedicated transmitters. This type of the radar network is also known as statistical multiple-input multiple-output (MIMO) radar [4]. On the designing stage of the statistical MIMO radar the question of how to make the trade-off on devoting the available location either to transmit or receive nodes arises.
In this paper, we address the problem of joint optimization of the transmit (Tx) and receive (Rx) radar nodes positions in the radar networks with widely separated antennas. We formulate the generic optimization problem of the first type, where the optimal positions of Tx and Rx radar nodes have to be selected in order to meet fixed accuracy requirements to target localization. This optimization problem implies the bilinear matrix inequality (BMI). We relax it to the linear matrix inequality (LMI) by introducing new variables that describe each of the Tx-Rx channels of the radar network. We explore the sparsity-based algorithm introduced in [11] to solve this problem. The algorithm can be applied for the selection of the favorable radar nodes' positions in scenarios, where the conditions of network regularity and symmetry cannot be satisfied. Another advantage of this algorithm is its ability to find global minimum of the objective function in contrast to the heuristic optimization algorithms. We developed technique, based on the convex optimization, for the selection of the positions for transmitting and receiving radar nodes that satisfy given requirements to the estimation accuracy of the radar network. We applied the developed framework to the topology optimization of the Frequency-Modulated Continuous-Wave (FMCW) radar network with widely separated transmit and receive radar nodes. The corresponding theory on the evaluation of the target localization accuracy using the Fisher information matrix (FIM) has been developed.
The paper is organized as follows. The system model is introduced in Section 2. Section 3 provides the developed framework to the radar network topology optimization problem. The comparative numerical analysis of the radar network performance and topology optimization for different types of the systems is given in Section 4. In Appendix, the theoretical bounds on the target localization accuracy (Cramér-Rao Lower Bound) in Frequency-Modulated Continuous-Wave radar network are presented.
2. System Model
We consider an active radar network with N transmitting and M receiving nodes in 3D space. The Tx and Rx nodes can be either colocated or separated corresponding to the monostatic and bistatic radar architectures, respectively. In the model of bistatic radar network, it is assumed that each of N totally available transmitters forms a bistatic sensing pair with each of M available receivers that correspond to the cooperative mode of the signal reception and result in
Antenna patterns of the Tx and Rx antennas are assumed to be omnidirectional. The target detection is based on the reflected signal. The data fusion is made on the level of single measurements of the estimated signal parameters at each of the receiving radar nodes. This implies two-step algorithm of the target localization. The fist step includes target detection and estimation of the signal parameters. In the second step, the target position vector is evaluated by applying appropriate positioning algorithm. For example, for target localization using the set of the measured signal time delays, the multilateration algorithm, based on the direct calculation, can be applied [14]. The target localization in 2D plane with multilateration algorithm that uses two measured bistatic distances is shown in Figure 1. In 3D space, the coordinate surfaces correspond to the ellipsoids of revolution in the points of transmitting and receiving positions of bistatic radar.
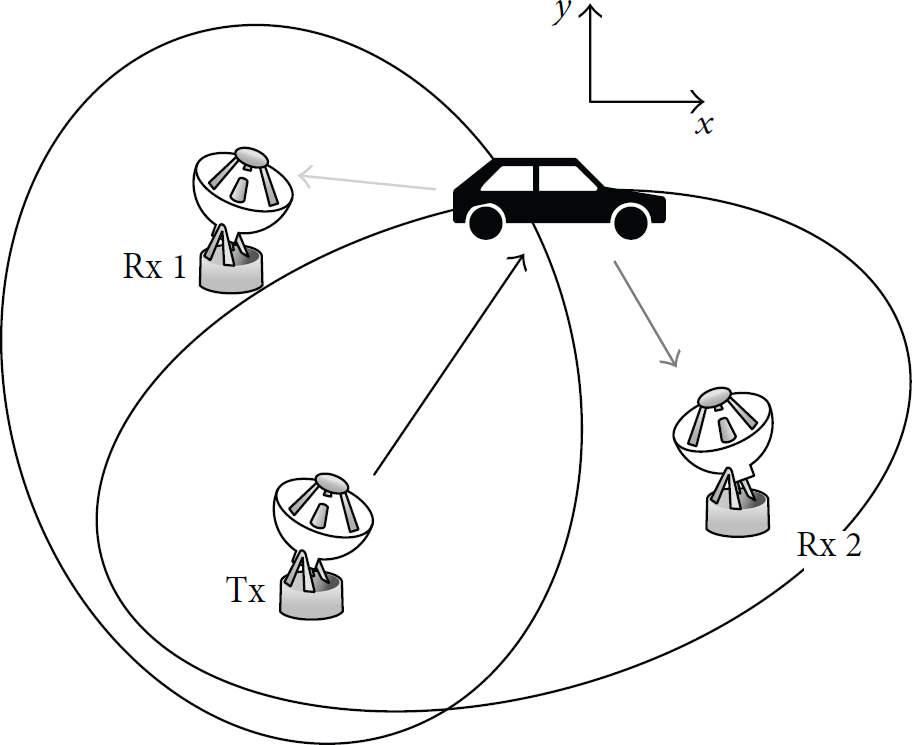
Target localization in multistatic radar network with cooperative mode of signal reception.
We consider the following measurement model:



A single target case is considered throughout the paper. It is assumed that the measurements from the multiple targets in the scene are associated using appropriate data association algorithm, like the one presented in [15]. Effects of the signal multipath are neglected, assuming that multipath is suppressed during the detection and the estimation in a single radar. The signal attenuation that occurs due to the finite target-radar distance is taken into account, following the classic radar equation:

3. Radar Network Geometry Optimization
We use the Cramér-Rao Lower Bound (the inverse of the Fisher information matrix) as the performance metric of the system to evaluate the target localization accuracy. Although the CRLB approaches the maximum likelihood estimatior (MLE) at high signal-to-noise ratios (SNR), it remains an effective metric of the radar network performance [16]. It incorporates the operational parameters of the single radar node as well as the system features (such as topology of the nodes, their architecture, and cooperation mode). Hence, the effect of these factors upon the system performance can be analyzed with the CRLB. Moreover, with increasing the number of the radar nodes, the threshold point (the point up to which the CRLB approaches the MLE asymptotically) moves to the lower SNR regions [17].
For unbiased estimator


One of the functions of the FIM can be used as metrics of the system estimation accuracy: the minimum eigenvalue (
In the optimization algorithm, we constraint the minimum eigenvalue of the FIM


3.1. The Radar Network with Colocated Transmit and Receive Antennas
We formulate the following optimization problem to select the minimum number


The dependence of the target localization accuracy upon the selected radars is introduced using the multiplication of each of the FIMs
Problem (9) is a convex optimization problem that can be solved with the algorithm presented in [11] by minimizing the reweighted

Since the number of the selected positions
3.2. The Radar Network with Widely Separated Transmit and Receive Antennas
3.2.1. Problem Formulation
In this section we consider bistatic radar network with cooperative mode of the signal transmission reception; that is, signals scattered from the target due to illumination by all of the transmit radar nodes are received by all of the receiving radar nodes. Then the Fisher information matrix that characterizes the system performance can be represented as

In order to choose the favorable geometry of bistatic radars, the positions of transmitting N and receiving antennas M have to be optimized simultaneously. The minimization function is then a sum of two (reweighted)

Constraint in (14) implies the bilinear matrix inequality (BMI) problem. BMI problems are NP-hard and include all quadratic problems. There are local and global methods for the solution of BMI optimization problems. Local method implies an alternate optimization over the parameters
3.2.2. Semidefinite Relaxation in BMI Problem of Multistatic Radar Network Geometry Optimization
First, we substitute the bilinear terms

Then we relax the constraint on

Problem (16) is a semidefinite programming (SDP) problem in the variables Initialize the iteration counter Solve the weighted Update the weight vectors: Stop on convergence or when k attains a specified maximum number of iterations
The application of the relaxation technique leads to non-Boolean solution of the optimization problem. An approximate Boolean solution can be found by thresholding nonzero entries of the vector γ or by applying the randomization technique [24].
As one can see, the structure of the FIM that describes the target localization performance of the radar network is defined as one that incorporates the estimation performance of each radar (Tx-Rx channel)
4. Numerical Results
In this section, we present the comparative analysis of the potential localization accuracy of multistatic and monostatic FMCW radar networks with application of the topology optimization algorithm. It is assumed that transmitted signals are orthogonal and do not interfere with each other [25]. Free-space model of signal propagation is used, assuming that the line-of-sight signal corresponds to the first and the strongest signal component in time.
4.1. Signal Model
The reference linear frequency modulated (LFM) up-chirp signal is

The signal, reflected from the point moving target, is

In addition to the time delay and Doppler frequency, the complex amplitude

4.2. The Analysis of the Potential Localization Accuracy of the Multistatic and Monostatic Radar Networks
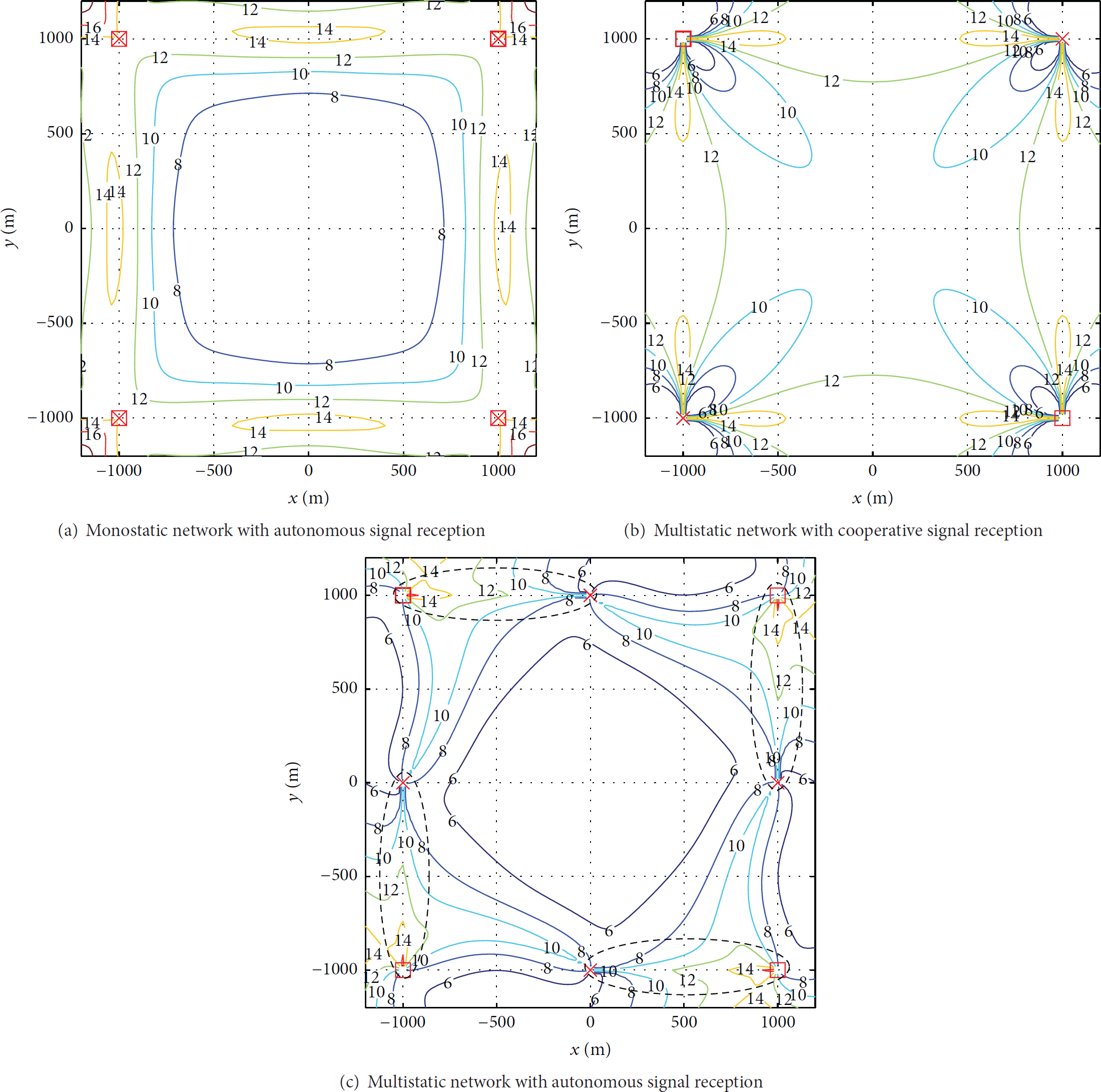
Figure 2 shows contour plots of the target localization accuracy for three types of the FMCW radar networks with four Tx-Rx channels each, (i) monostatic radar network with autonomous mode of the signal reception (Figure 2(a)), (ii) multistatic radar network with cooperative mode of the signal reception (Figure 2(b)), and (iii) multistatic radar network with autonomous mode of the signal reception, where autonomous Tx-Rx pairs are depicted with dashed ellipses (Figure 2(c)). We define the localization accuracy as
Simulation parameters of a single radar node.

Contours of the position estimation accuracy
The presented plots show that the multistatic network with the cooperative mode of the signal reception (Figure 2(b)) provides the equivalent localization accuracy to the monostatic radar network with autonomous mode of the signal reception (Figure 2(a)) but with two times less number of Tx-Rx channels. By introducing additional four radar nodes that form four autonomous Tx-Rx pairs of the multistatic radar network (Figure 2(c)), the localization accuracy increases, compared to the monostatic radar network (Figure 2(a)), because of the higher spatial diversity gain.
To summarize, the multisatic radar network possesses significant advantage over the monostatic radar network in terms of the localization accuracy and the number of Tx-Rx channels. This advantage can be interpreted in two ways: either as an ability to provide higher localization accuracy with the same number of Tx and Rx channels or an ability to provide the same accuracy with less number of Tx-Rx channels. Subsequently, this allows for substantial advantages in the system cost (less number of transmitting and receiving channels) compared to the monostatic radar network.
4.3. Optimization of the Multistatic Radar Network Geometry
Next, the topology optimization algorithm was applied to the scenario of the target localization in FMCW radar network along the specified areas in the city of Delft (Netherlands). These areas correspond to the canal and the highway in the city (Figure 3). The target radar cross section is

Positions of the GSM masts in the Delft area (blue dashed line indicates the surveillance areas).
Figure 4 shows the distribution of the localization error around the target area of interest with optimized radar network geometry for two considered scenarios in 2D plane. For the first and the second scenarios, the maximum value of the localization error around the target area is equal to 1 m and 5 m, respectively. The number of the Tx and Rx channels is less in the second scenario due to the spatial diversity of the Tx and Rx radar units, which leads to higher signal-to-noise ratio without increasing the number of Tx-Rx channels. For the first scenario, the selected radar network includes both monostatic and bistatic radars. To summarize, the positions of the Tx and Rx grids relative to each other affect the optimization result significantly. The exploitation of the spatially separated Tx and Rx grids allows for the less number of the radar nodes required to satisfy the same accuracy constraint, compared to the scenario with fully overlapping Tx-Rx radar grids.
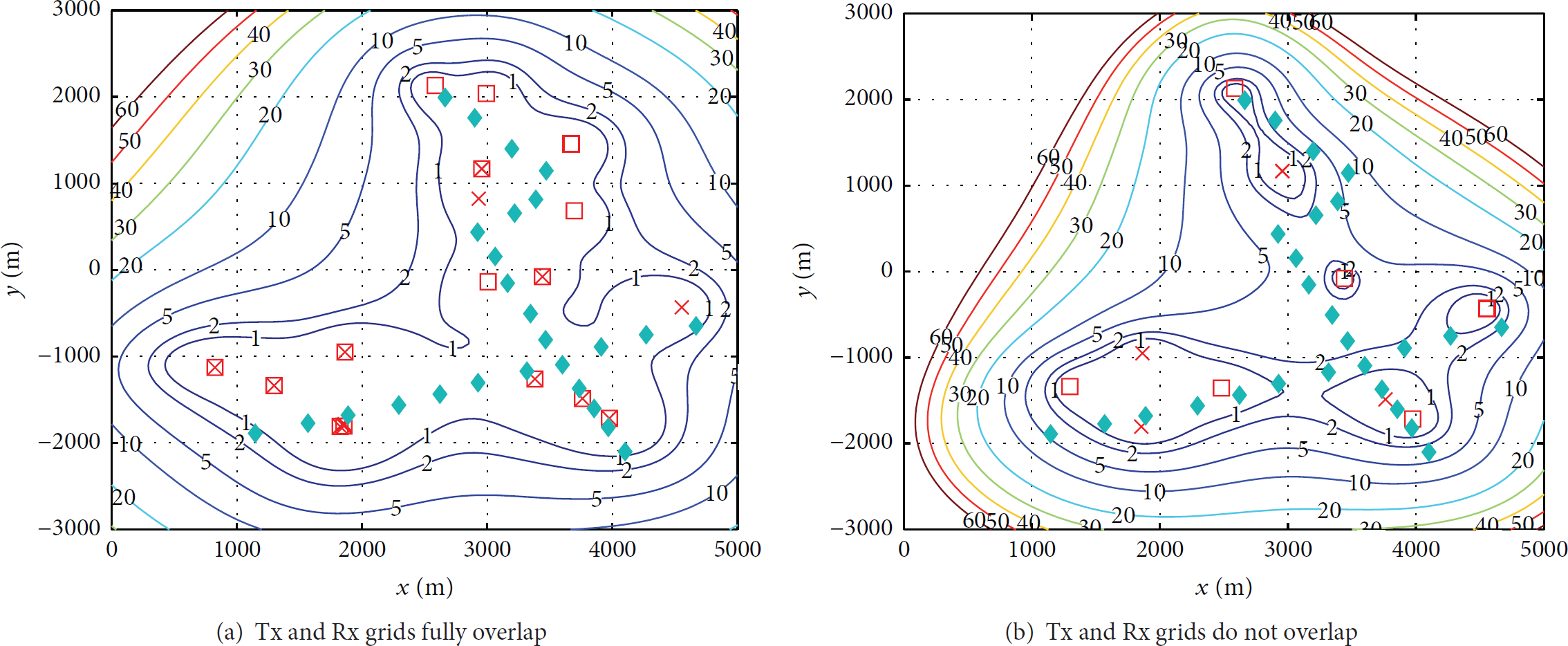
Contours of the position estimation accuracy
5. Conclusion
In this paper, the optimization approach of the multistatic radar networks with widely separated transmit and receive antennas has been developed. We have tackled the problem of the selection of the minimum number of the radars, which provide given requirements to the target localization accuracy, in the radar networks with widely separated transmitting and receiving nodes. The sparsity-based optimization approach was adopted to solve this problem. It has been shown that the optimization of the multistatic radar network geometry implies the bilinear matrix inequality problem. We have reduced this problem into the linear matrix inequality by applying the semidefinite relaxation technique. The developed framework has been applied to the geometry optimization of the FMCW multistatic radar network for the target localization. With the numerical results, it has been shown that the optimization can be performed for fully overlapping transmitting and receiving radar grids. However, setting Tx and Rx radar grids to the nonoverlapping ones results in less number of required sites for the transmission and the reception. This is due to the fact that separated Tx and Rx radar grids allow exploring the spatial diversity gain in the process of the estimation target parameters.
The proposed technique can be applied for the optimization of the radar networks that have different parameters and explore other modes of the signal reception (autonomous, cooperative, or combination of both). For example, it can be extended to the model, where the parameter vector contains other parameters, such as target velocity, or combination of different parameters, such as position and velocity vectors. Moreover, the developed framework is not limited to the estimation task; it can be applied to solve detection-driven optimization problems that arise in various types of sensors, which measure different environment parameters (temperature, pressure, humidity, etc.).
Footnotes
Appendix
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work has been partly performed within the RAEBELL project. The authors would like to thank Geert Leus, Sundeep Prabhakar Chepuri, Jonathan Bosse, and Ronny I. A. Harmanny for fruitful discussions.