
Abstract
To combat severe intersymbol interference incurred by multipath propagation of sound waves in the underwater acoustic environment, we introduce an iterative equalization and decoding scheme by iteratively exchanging soft information between a low-density parity check (LDPC) decoder and a decision feedback equalizer. We apply extrinsic information transfer (EXIT) charts to analyze performance of LDPC codes over the acoustic multipath channel. Furthermore, using differential evolution technique, we develop an EXIT-aided method to optimize LDPC codes for the underwater acoustic channel. Design examples are presented for two different realizations of the underwater acoustic channel that are generated by an acoustic ray tracing model. Computer simulations show that the optimized LDPC codes outperform its regular counterpart or Turbo codes under the same coding rate and block length, with gains of 1.0 and 0.8 dB, respectively, at the bit error rate of 10−5.
1. Introduction
Underwater acoustic communications have attracted much attention in recent years due to their broad application perspectives in the civil and defense domains. Applications may include oceanographic data collection, ocean pollution monitoring, ocean exploration, and subsea tactical surveillance [1–4]. However, it is a challenging task to achieve reliable communication due to the difficulties imposed by the acoustic propagation physics. The major difference between the underwater acoustic and radio frequency electromagnetic channels is that the former is characterized by large multipath delays and Doppler dispersion. Most of the difficulties can be attributed to the low speed of sound 1500 m/s in the seawater, which is five orders of magnitude slower than the speed of electromagnetic waves [5, 6].
Decision feedback equalizers (DFEs) are commonly used to combat intersymbol interference associated with multipath fading in the underwater acoustic channel. An adaptive DFE based on the combined recursive least square (RLS) and second-order phase-locked loop was developed for high-rate underwater acoustic communication systems [7]. Experiments conducted in multiple environments demonstrated significant data rate and performance advancements. An adaptive multichannel combining and DFE equalization scheme was proposed in [8]. Near optimal spatial and temporal processing was proposed through joint minimum mean-squared error (MMSE) multichannel combining and equalization. Multichannel processing of underwater acoustic communication signals often leads to high computational costs. Complexity reduction was achieved by exploiting trade-offs between optimal diversity combining and beamforming in [9]. A sparse DFE structure that exploits the channel sparsity was developed in [10], to reduce receiver complexity.
Powerful error correcting coding techniques are often employed to further reduce the bit error rate (BER) in the challenging underwater acoustic channel conditions. Due to channel variability resulting from environmental fluctuations such as ocean mixing and dynamic surface waves, the DFE alone cannot achieve adequate performance for practical communication applications. For example, a BER of less than 10−3 is required for digital voice communication systems to synthesize natural speech. Convolution codes and Reed Solomon block codes are commonly used for real-time underwater acoustic communication system due to their simplicity. These codes were still not adequate to satisfy the BER requirement [11, 12]. Space-time trellis codes, layered space-time codes, and their combinations scheme were developed for high reliability and high data rate communications [13]. Turbo equalizer that jointly performs channel estimation, maximum a posteriori (MAP) equalization, and channel decoding was introduced for single-carrier coherent underwater acoustic communication [14, 15].
Several efforts have reported applying low-density parity check (LDPC) codes to the underwater acoustic environment, mostly for orthogonal frequency division multiplexing (OFDM) systems [3, 16]. In [16], nonbinary LDPC codes were proposed to enhance performance of uncoded orthogonal frequency division multiplexing (OFDM) communication for the underwater acoustic environment. In [3], LDPC decoding is coupled with soft minimum mean square error (MMSE) equalization for iterative detection on each subcarrier for multiple-antenna OFDM communications in the ocean.
Irregular LDPC codes with an appropriate degree distribution may outperform Turbo codes under the same coding rate and block length [17]. However, LDPC codes exhibit a noise threshold phenomenon [18], when the iterative belief propagation decoding algorithm is used. If the channel noise level is smaller than, or below, a noise threshold, the BER converges to zero as the block length goes to infinity. Otherwise, an error floor exists. When the belief propagation algorithm is adopted to decode LDPC codes, extrinsic information is exchanged iteratively between the variable nodes and check nodes. Performance of LDPC codes converges as the iteration number increases. We can analyze the performance and, thus, determine their noise threshold by tracing evolution of the exchanged extrinsic information.
Two types of methods, the density evolution algorithm [17] and extrinsic information transfer (EXIT) chart [19], can be used to calculate the noise threshold. The density evolution algorithm determines the threshold by tracing the evolution of the variables' average distributions, under the assumption that the extrinsic information exchanged between the variable nodes and check nodes is independent random variables [17]. The density evolution algorithm has been widely used for analyzing and designing LDPC codes over different channels. Through the density evolution algorithm and related optimization techniques, multiple high-performance LDPC codes and their noise thresholds were given for the additive white Gaussian noise (AWGN) and binary symmetric channel in [17], and for flat Raleigh fading channel in [20]. However, these LDPC codes may not yield quality performance for intersymbol interference channels [21]. The density evolution algorithm was extended to investigate the limit of performance of LDPC codes over binary linear intersymbol interference channels with AWGN [22].
A simplified version of the density evolution algorithm, namely, the Gaussian approximation, was developed by approximating message densities as Gaussians (for regular LDPC codes) or Gaussian mixtures (for irregular LDPC codes) [23]. This is to reduce the computational load involved in calculation of noise threshold as well as in optimization of degree distributions in the density evolution algorithm. Further, these tasks are often difficult for common channel conditions. This simplification provides a faster solution to calculate the noise threshold and an easier way to design optimized LDPC codes for the AWGN channel.
The EXIT chart was developed initially to analyze the performance of parallel concatenated codes by tracing evolution of average mutual information [19]. It was extended to analyze the performance of LDPC codes by matching the EXIT curves of the variable nodes decoder (VND) and those of the check nodes decoder (CND) [24]. Optimized LDPC codes were designed for the AWGN channel and for the multiple-input and multiple-output (MIMO) setting [24]. High-quality LDPC codes via optimization of the EXIT charts were given for a flat Rayleigh fading channel in [25], for the Poisson pulse-position modulation channel in [26], and for high-dimension MIMO channels in [27]. Compared with the density evolution algorithm, the EXIT chart is simple in implementation. It can be readily applied to multipath environments, for example, the underwater acoustic channel.
Here we focus our efforts on a single-carrier communication system in the underwater acoustic environment. The underwater acoustic channel generally contains both deterministic and stochastic properties. In a typical scenario, the deterministic characteristics are dependent on the sound frequency, surface and bottom acoustic properties, ocean sound speed profile, and location of transmitter and receiver. It means that the multipath or impulse response of the underwater acoustic channel may be quite different from one to another. The stochastic characteristics result from the rough and time-varying sea surface. We deal with the underwater acoustic channel at different transmission ranges. We use the BELLOP ray tracing model [28] to generate the impulse responses of specific channel realizations.
We employ a DFE to process the received signal first and then adopt belief propagation algorithm to decode the information bits. To further improve performance, an iterative equalization and decoding scheme, termed as iterative DFE-LDPC structure, is proposed. In the DFE-LDPC structure, the soft information from the LDPC decoder is fed to the DFE as prior information. Since the DFE utilizes the channel information, as well as the soft information from the LDPC decoder, performance of the iterative scheme enhances with iterations. Limited investigations have been devoted to LDPC codes for single-carrier systems in the acoustic channel. One related effort was presented in [29], where soft-decision feedback equalization was combined with LDPC codes to provide robust detection performance for MIMO communications with different modulations schemes at different symbol rates, over different transmission ranges in the ocean.
In this paper, we extend the EXIT chart to analyze the performance of LDPC codes over the underwater acoustic channel. Since performance of LDPC codes is strongly related to degree distributions and different impulse responses may have different appropriate degree distributions, we propose an EXIT-aided optimization for specific channel realizations. Optimization of LDPC codes often turns into minimization of a nonlinear cost function, where differential evolution has been shown to be effective and robust [30]. Differential evolution has been successfully applied to optimization of LDPC codes for both the AWGN [17] and flat Raleigh fading channel [20]. We show that this technique is also effective for the underwater acoustic channel. Design examples are given for two different realizations. Performance comparisons among the optimized LDPC codes, regular LDPC code, and Turbo code are provided over the two different channel realizations.
The remainder of the paper is organized as follows. The underwater acoustic channel model is introduced and two impulse responses are given in Section 2. The iterative DFE-LDPC structure and its EXIT charts are presented in Section 3. Section 4.1 discusses the EXIT-aided method of code optimization by using the differential evolution technique. Section 4.2 presents design examples of LDPC codes. Section 5 provides the conclusion.
2. Underwater Acoustic Channel Model
Transmission characteristics of the underwater acoustic channels are affected by multiple factors, including the operating frequency, sound speed profile, sea surface conditions, bathymetry, sediment properties, and source-receiver geometry and its mobility. BELLHOP is a beam tracing model for predicting underwater acoustic sound propagation [28]. With known physical parameters of the ocean environment and source-receiver settings, both time-invariant and time-varying impulse responses can be simulated efficiently through the use of the model [28, 31]. We focus on investigating the effects of multipath propagation on the performance of LDPC codes. Only time-invariant impulse responses, therefore, are considered in this paper.
In the simulating impulse response, we assume flat sea surface and ocean bottom in 100 m water depth, with sound speed profile shown in Figure 1, left [32]. We assume the ocean silt bottom with a sound speed of 1600 m/s and a density of 1.1 km/m3, and an attenuation coefficient of 0.8 dB/m. We assume a maximum sea surface wind speed of 10 m/s to infer the reflection characteristics. The transmitting and receiving nodes are positioned at 10 and 80 m above the seafloor. The acoustic operating frequency is 15 kHz.

Ray diagrams of the communication ranges: (a) UWAC1 and (b) UWAC2.
We consider two communication ranges, 1 and 2 km, to investigate the multipath structures and their impacts on equalization performance. The two associated impulse responses are referred to as UWAC1 and UWAC2, respectively, throughout the paper. Figures 1 and 2 show the ray diagrams and the two impulse responses for the ranges. As shown, path numbers increase from 7 to 11 as the communication range increases from 1 to 2 km. The delay spread increases from 33 to 72 ms. In both cases, the amplitude of the channel tap gets smaller at larger arrival delay, due to loss resulting from sea surface reflection and bottom attenuation. Compared with bottom attenuation, the reflection loss from the sea surface is more severe, due to the high acoustic operating frequency and a relatively high wind speed.

Impulse responses: (a) UWAC1 and (b) UWAC2.
Let the impulse response of the underwater acoustic channel be given by

3. Iterative DFE-LDPC Structure and Its EXIT Charts
We propose an iterative equalization and decoding scheme, referred to as iterative DFE-LDPC structure, to combat the sever multipath in the underwater acoustic channel. We obtain EXIT charts of the DFE-LDPC structure to analyze performance of the LDPC codes over the underwater acoustic channels.
In the proposed structure shown in Figure 3, the received signal distorted by the underwater acoustic channel is first processed by a DFE and then applied by a LDPC decoder, during an initial iteration. At the next iterations, the soft decoding result from the LDPC decoder is fed back to the DFE as a priori information. Based on the received signal and the a priori information, the DFE improves its performance. The LDPC decoder then enhances its decoding performance, as a result. This iterative process goes on until the termination criterion is met: that is, the iteration number is greater than the maximum iteration number, or decoding is successful. In this structure, two different iterative processes exist. One is the iteration between the VND and the CND within LPDC decoding. The other is the iteration between the DFE and the LDPC decoder. Two iterations are referred to as the inner and outer iterative processes, respectively. We set the inner and outer maximum iteration number to 2 and 20, respectively, in our simulations. Figure 3 also illustrates the flow of information exchanging between the LDPC decoder and the DFE and those within the LDPC decoder.
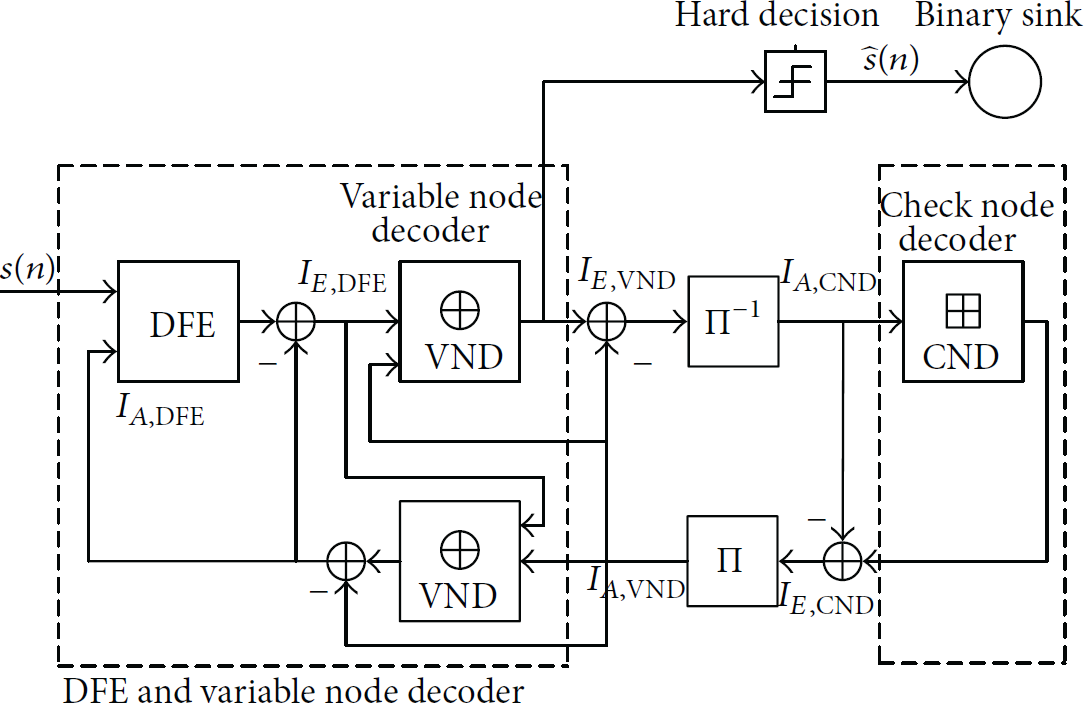
Iterative DFE-LDPC structure with the information changing flow illustrated.
The DFE performs detection by considering all


If we assume that both the information exchanged between the DFE and the VND and the information exchanged between the VND and the CND satisfy a Gaussian distribution, the EXIT function of the VND with degree



For irregular LDPC codes, the EXIT curve of the VND is the weighted average of all EXIT curves of the VND with degree

In Monte Carlo simulations, it is easy to obtain the EXIT curves of the VND through (5) and the EXIT curves of the CND through (6). Figure 4 shows the EXIT curves at the coding rate

EXIT curves of the iterative DFE-LDPC structure over the two types of impulse responses: (a) EXIT curves of the VND and (b) EXIT curves of the CND.
4. Optimization of LDPC Codes
By matching the EXIT curves of the VND to those of the CND, we can analyze coding performance and obtain noise threshold for any kind of LDPC codes over the underwater acoustic channel. Furthermore, good LDPC codes can be found through the use of an optimization algorithm to search for the highest noise threshold in a degree distribution space. The searching process is very complex because there are many parameters to be determined simultaneously. The differential evolution is a fairly fast and reasonably robust method that optimizes the solution by iterating candidate solutions for a given measure of quality [30]. We use the differential evolution technique to search an optimized LDPC code here.
4.1. Differential Evolution Algorithm
Considering the fact that the performance of a LDPC code is related mainly to the degree distribution of the variable nodes, and little to the degree distribution of the check nodes, we assume that the number of degree for the check nodes is 1 (or 2), and its degree is

With the constraint in (10), the differential evolution algorithm for searching good degree distribution of the LDPC codes is described as follows.
Initialization
Choose distinct D integers from set For the initial iteration
(1) Mutation. For each

(2) Evolution. For the
(3) Stop. If
4.2. Design Examples
To reduce the computational load, we restrict the variable nodes to only three distinct variable node degrees
Optimized parameters of LDPC codes over the two types of impulse responses.

Figure 5 shows the EXIT curves of the optimized LDPC codes over the UWAC1 and UWAC2 channel realizations. In Figure 5, both the EXIT curves of the VND and the CND converge to 1 as the a priori mutual information increases. The EXIT curve of the VND follows very closely the EXIT curve of the CND from the above, when the SNR (

EXIT charts for LDPC codes over two channel realizations: (a) UWAC1 and (b) UWAC2.
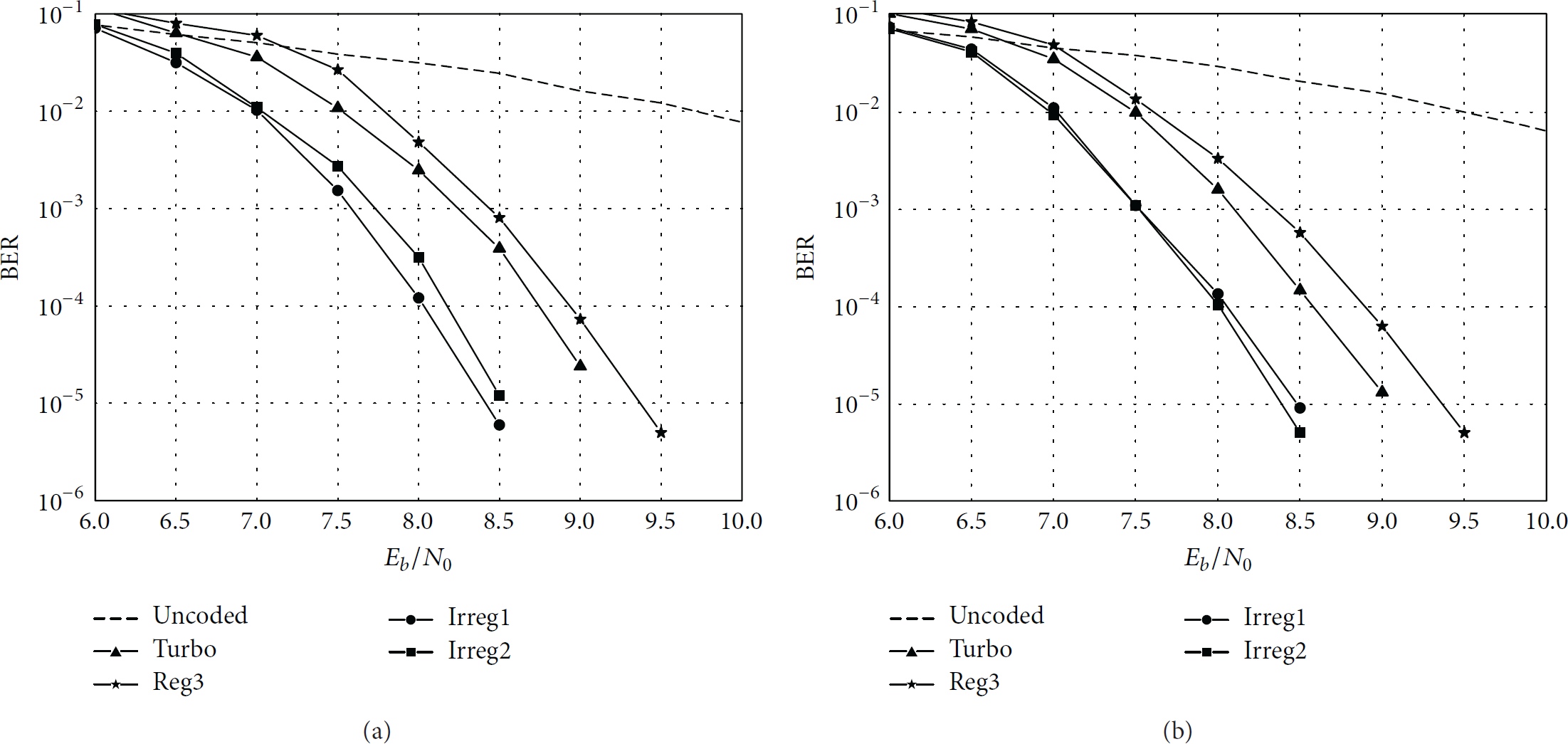
Figure 6 gives the simulation results for the optimized LDPC codes over the two channel realizations. In Figure 6, the symbols “Irreg1” and “Irreg2” represent the optimized LDPC codes for the two cases: UWAC1 and UWAC2 realizations, respectively. “Reg3” represents a regular LDPC code with 3 degrees for variable node. “Turbo” represents a Turbo code with constraint lengths of 4, and “Uncoded” indicates the performance of an uncoded system. We use progressive edge-growth algorithm to construct the parity check matrix. The belief propagation algorithm is used to decode the LDPC codes while Log-MAP algorithm is used to decode the Turbo code. All constructed codes have a coding rate of

Performance of the optimized LDPC codes, regular LPDC code, and Turbo code over the two channel realizations: (a) UWAC1 and (b) UWAC2.
We note that the LDPC codes optimized for the UWAC1 realization also have quality performance for the UWAC2 realization and vice versa. Under the constraint of the limited block length and limited iteration count, a performance gap of about 1.3–1.5 dB is achieved between the numerical simulation and the noise threshold from the EXIT charts.
Figure 7 shows performance of the optimized LDPC codes over two channel realizations with colored noise. The noise attenuates with sound frequency by 20 dB per octave. Due to the acoustic high frequency and narrow bandwidth, the optimized LDPC codes perform better than Turbo code and regular LDPC in this case. Comparing Figure 7 with Figure 6, we found that the DFE-LDPC receiver in colored noise has almost the same performance as in AWGN.
Performance of the optimized LDPC codes, regular LPDC code, and Turbo code over the two channel realizations in colored noise: (a) UWAC1 and (b) UWAC2.
5. Conclusions
The underwater acoustic channel is a complex, multipath fading environment. To achieve low BER performance for single-carrier coherent underwater acoustic communication systems, we introduce an iterative equalization and decoding scheme. Simulations demonstrate that the proposed scheme has ability to achieve excellent BER performance at low SNRs over two different multipath realizations. We extend the EXIT charts to the underwater acoustic channel to assess the performance of the LDPC codes. We propose an EXIT-aided method to optimize LDPC codes using the different evolution algorithm. Simulations show that BER of the optimized LDPC codes is less than 10−5 at
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Project no. 41276038) and the China Scholarship Council (CSC).