
Abstract
The distributed detection fusion formulation (DDFF) in ideal multisensor systems has been studied over the last two decades. If some local sensors cannot work normally, the detection performance of system may reduce significantly. It is meaningful to design fault-tolerant detection fusion rules which can guarantee the performance of system no matter whether the fusion center and local sensors work well or not. A new distributed detection fusion strategy is thus proposed by minimizing a weighted sum of risk at the fusion center and risks at the local sensors, and then a fault-tolerant distributed detection fusion formulation (FT-DDFF) is derived. Some numerical examples illustrate the performance of the proposed formulation. If the whole system is perfect, compared with the DDFF, the FT-DDFF has both small risks of local sensors and a little small risk of fusion center with an appropriately selected parameter. While some local sensors cannot work, the FT-DDFF would perform better than the DDFF at fusion center in average.
1. Introduction
In the past, more than two decades, multisensor information fusion techniques have received significant attentions in practice (see, e.g., [1–9]). In distributed architectures, the local decisions or estimates using the observations from individual processors are made and then transmitted to a fusion center where the final global decision or estimate is made in terms of some criterions. Such distributed multisensor architecture has many advantages, such as more capability, reliability, robustness, and survivability than the centralized architecture.
For a parallel distributed multisensor system, the optimal detection fusion formulation was addressed (see, e.g., [3, 4, 7, 10, 11]). In [3], a distributed detection fusion formulation (DDFF) was provided in ideal conditions. It seeks a detection fusion rule for whole system and information compression rules for all local sensors. Some necessary conditions of an optimal fusion rule and optimal sensor decision rules are derived using a person-by-person optimization (PBPO) methodology. The desired PBPO solution consists of a fusion rule and some sensor decision rules. For distributed detection fusion systems with correlated noises, the fusion rule and sensor decision rules were formulated to the fixed points of some equations and an iterative algorithm was developed in [4, 7]. It provides the approximate solutions to the necessary conditions for optimum sensor decision rules. An algorithm to simultaneously search for an optimal fusion rule and the corresponding optimal sensor decision rules was derived in [12]. In [13], a computationally efficient iterative algorithm to simultaneously and alternately search for a fusion rule and sensor decision rules was proposed. All of the above works are to minimize the Bayesian risk at the fusion center, and the solutions were derived when the system is perfect.
As the local sensors are just to serve for the fusion center, when the optimal performance of fusion center is attained, the performances of some local sensors may be ignored. If the fusion center is destroyed, each local sensor would use its own decision rule to make the final decision for the two hypotheses. Then, the performance of the whole system would be reduced. If some local sensors are destroyed, or the communications between fusion center and those sensors are cut off, the fusion center can only use the available local decisions so that its performance would not be guaranteed. Thus, it is meaningful to design fault-tolerant fusion rule and sensor decision rules.
The fault-tolerance capability is an important factor in many applications, such as designing classification systems in wireless sensor networks (WSN). Several researchers have considered the design of fault-tolerant distributed detection fusion systems [14–16]. However, they only designed the system based on a known a priori failure probability and considered the binary detection problem. The extension from binary detections for fault-tolerant detection to multihypothesis detections was also considered in WSN [17]. The authors proposed a classification fusion approach which was implemented via error correcting codes to incorporate fault-tolerance capability. In [18], a fusion rule that combined both soft-decision decoding and sensor decision rules was proposed in WSN with fading channels. Besides the error correcting codes which provide good sensor fault-tolerance capability, the soft decoding scheme is utilized to combat channel fading. In [19], the optimal sensor decision rules with channel errors for a given fusion rule were proposed in which sensor observations are not necessarily independent of each other. Furthermore, the results on the unified fusion rules for network decision systems with ideal channels were extended to systems with channel errors.
In this paper, for a general parallel distributed detection fusion system, we extend the idea of existing DDFF by employing a new detection fusion strategy so as to find a fault-tolerant formulation. It can guarantee the performances of both fusion center and local sensors whether the system is perfect or imperfect. Under Bayesian criterion, the risks at local sensors (local risks) are defined similar to the risk at fusion center (system risk). The new detection fusion strategy is adopted to minimize the total risk, that is, the weighted sum of system risk and local risks. A new fault-tolerant distributed detection fusion formulation (FT-DDFF) is obtained by the PBPO methodology as the DDFF.
The rest of this paper is organized as follows. A statement of the problem and a brief review of the DDFF are given in Section 2. In Section 3, we model the fault-tolerant detection fusion under a new strategy and derive an FT-DDFF by PBPO methodology. Some numerical examples are provided in Section 4, and a conclusion is given in Section 5.
2. Problem Statement
Consider a distributed detection fusion system depicted in Figure 1 which has N local sensors and a fusion center.
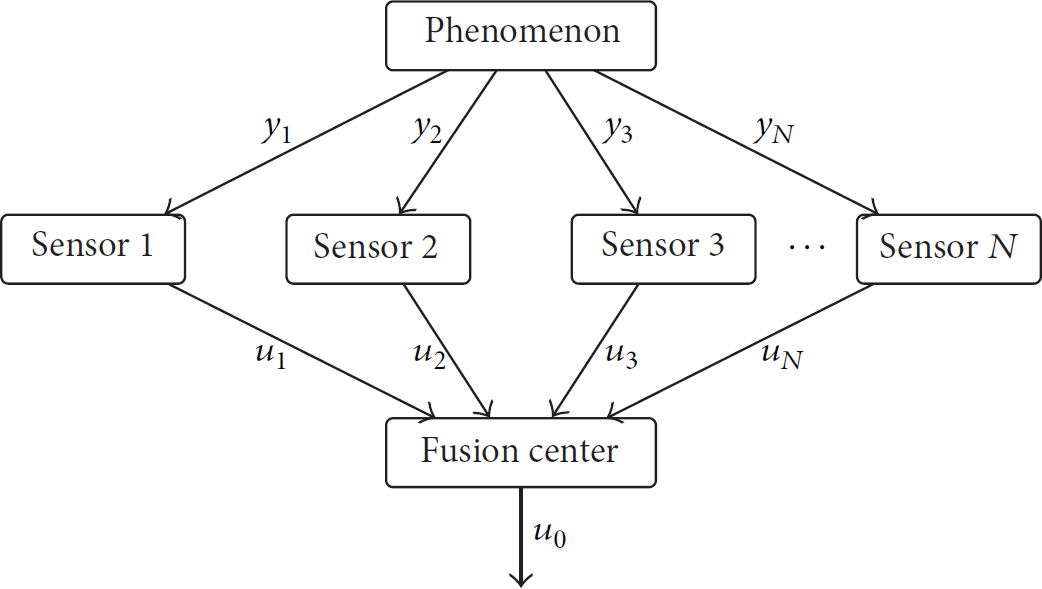
Distributed detection fusion system.
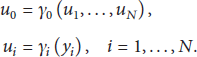
Let
The distributed detection fusion problem is to seek an optimal set of rules:

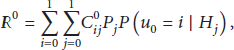
Denote the probabilities of false alarm, miss, and detection at fusion center by
In [3], the distributed detection fusion is modeled by minimizing the following system risk:


Thus, the DDFF consists of N equations given by (5) and
The purpose of Bayesian criterion in [3] is to optimize the performance of fusion center. As the optimal performance of fusion center is attained, the performances of some local sensors may be ignored. From (5) and (6), the sensor decision rules and fusion rule are coupled with each other. If the system is imperfect, for example, some local sensors fail or the joint conditional probability density functions of observations vary; the performance of fusion center would become very poor. In addition, it is also important to guarantee the performances of local sensors in many practical applications.
3. The Fault-Tolerant Detection Fusion Formulation
The local risk of the kth local sensor is expressed as



In order to design a fault-tolerant formulation which could guarantee the performances of both fusion center and local sensors, we will consider the total risk, that is, the weighted sum of system risk and local risks:


Theorem 1.
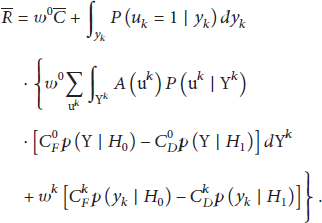
The solution Γ of problem (12) by the PBPO methodology can be obtained from the following FT-DDFF:
The formulation for fusion rule at fusion center as the DDFF is
The formulation for decision rule at the kth sensor for all


Proof.
First, we consider the fusion rule. By the PBPO methodology, we assume that all sensor decision rules have been designed and then the local risks are fixed. Therefore, we only need to minimize the system risk function
Next, we deal with the decision rule at the kth sensor by the PBPO methodology for


For


The conditional density of

From


Remark 2.
Similar to the DDFF, the fusion rule and sensor decision rules of the FT-DDFF given in (13) and (14) are also coupled with each other. In addition, the FT-DDFF is derived by the PBPO methodology so that it only obtains the suboptimal solution of original optimization problem (12) in general. However, as the FT-DDFF partly optimizes the local risks, the performances of the local sensors may be better than the DDFF. More importantly, the new detection formulation has some superiorities of fault tolerance for the imperfect detection fusion system. It will be shown in Section 4.
4. Numerical Examples
In this section, some numerical simulations are provided for the binary detection fusion problem in a distributed system with three local sensors; that is,

Let the costs of the correct decision and mistaken decision be zero and unity, respectively; that is,
Assume that the observation noises at three sensors follow the Gaussian distribution. Under
The purpose of this paper is to design a fault-tolerant detection fusion rule which can guarantee the performance of system no matter whether it works well or not. Therefore, we will just evaluate the performance of the FT-DDFF for perfect and imperfect distributed systems.
4.1. Perfect Distributed Systems
We will compare the performances of two formulations when the system is perfect. As mentioned before, besides the system risk, we also focus on the local risks so that the performances of local sensors and fusion center will be evaluated simultaneously.
Suppose that the prior probability

Ratios of average risks by the FT-DDFF to those by the DDFF.
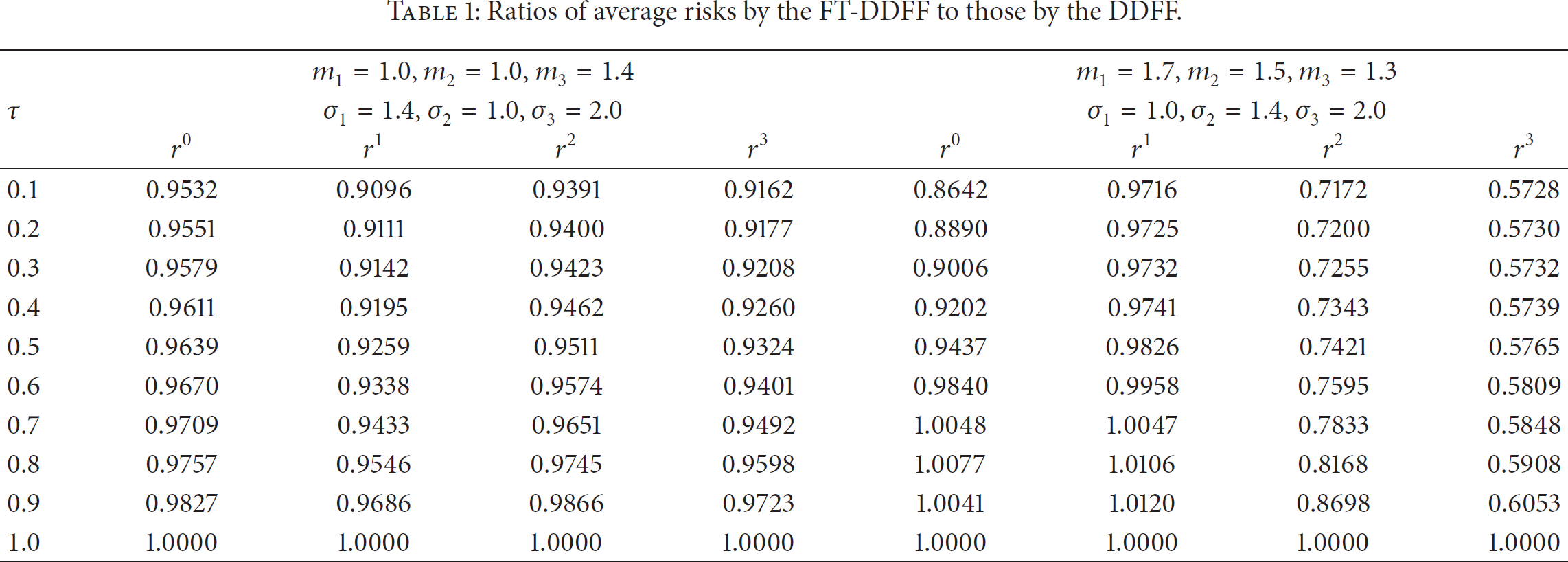
In Table 1, for some different τ, we computed all average risk ratios of fusion center and local sensors. When 

The total risk R versus the weight τ at fusion center, while
If 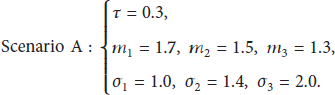
For Scenario A, the comparisons of probabilities of error detections for fusion center and local sensors under the DDFF and FT-DDFF are shown in Figures 3 and 4. Figure 5 shows the comparisons of the receiver operating characteristics (ROCs) of local sensors.

Comparison of the system risks for Scenario A.
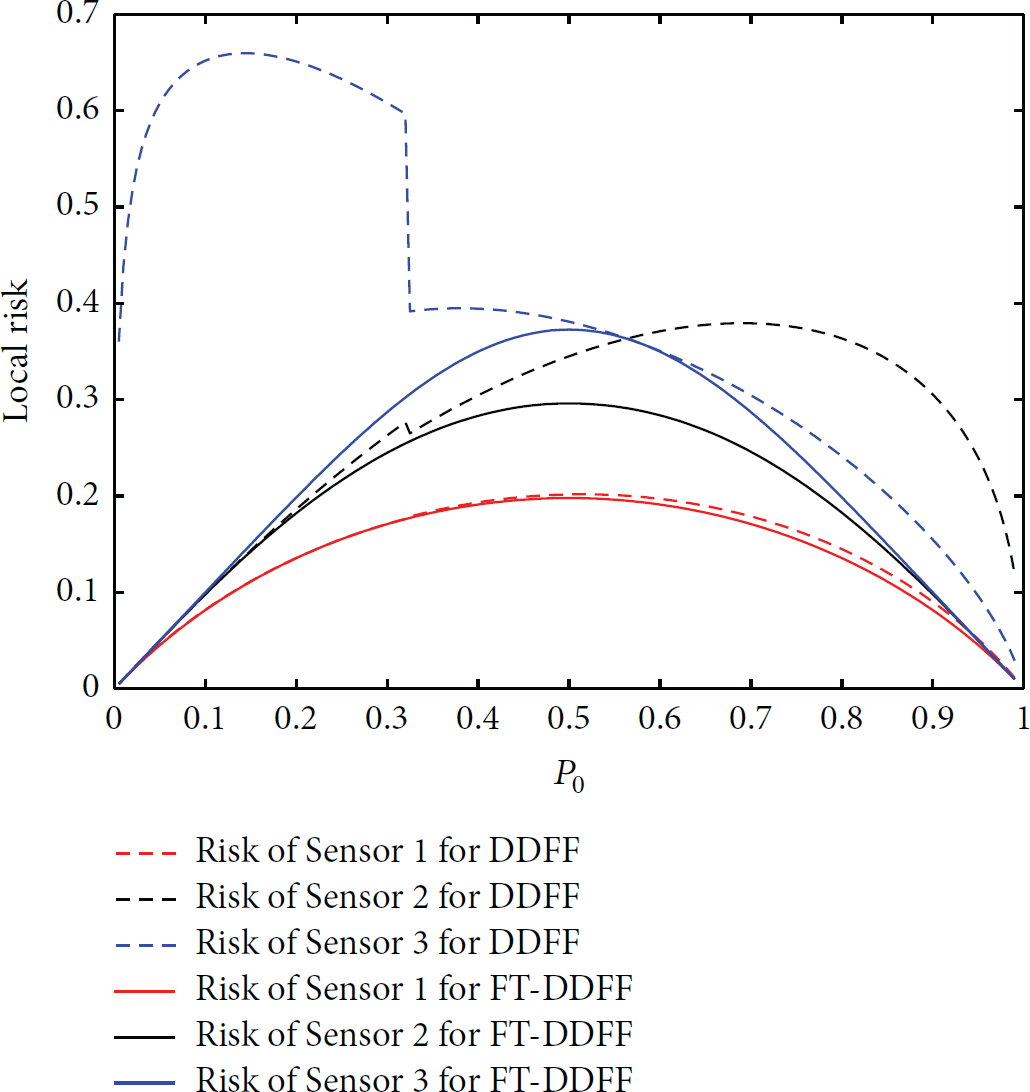
Comparison of the local risks for Scenario A.
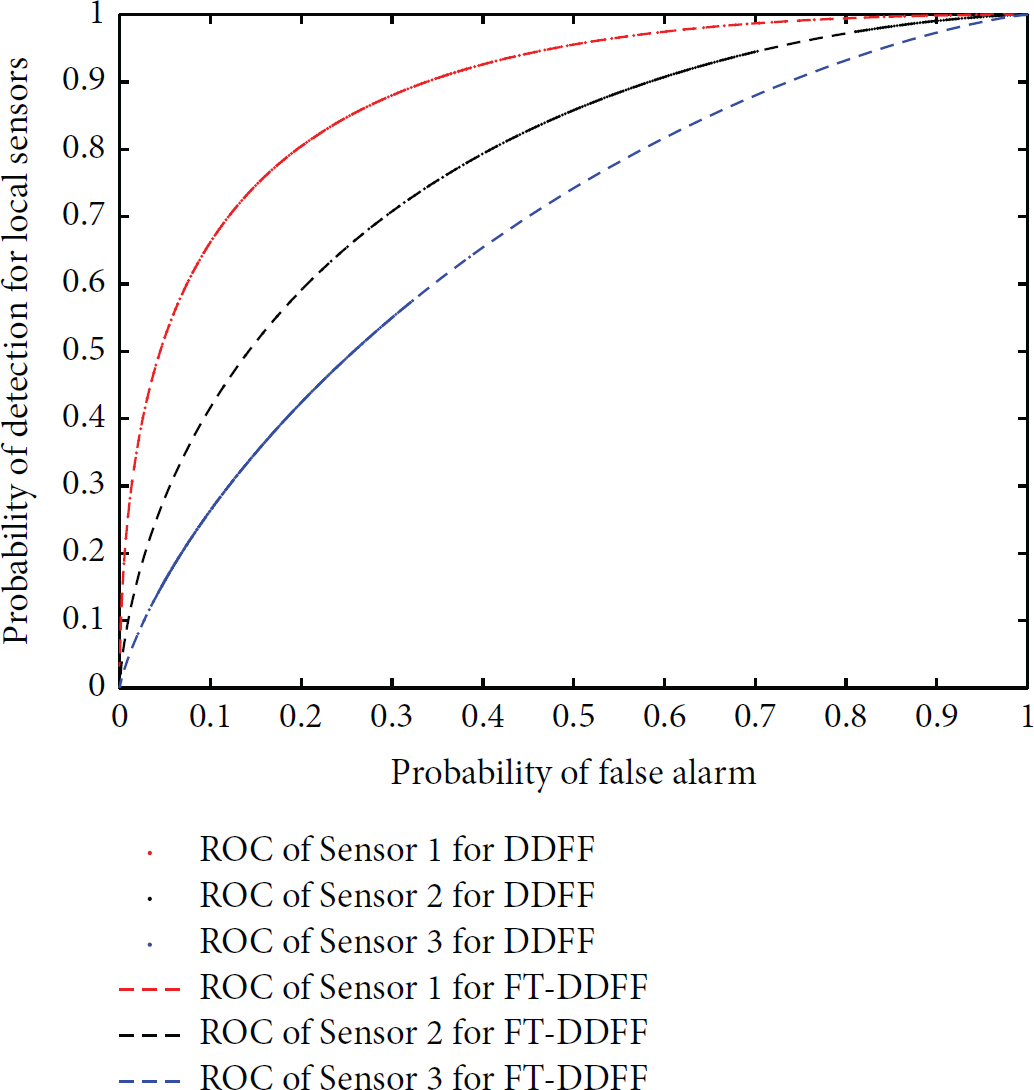
Comparison of ROCs at local sensors for Scenario A.
Figure 3 shows the system risks of two fusion formulations. Although the system risk of the FT-DDFF is not less than that of the DDFF uniformly, the average system risk is less certainly. Note that the curve of system risk
4.2. Imperfect Distributed Systems
There are many kinds of deteriorations for a distributed fusion system. The fusion center may be destroyed or could not work normally; some of local sensors may be destroyed or the communications between fusion center and some local sensors may be cut off, which means that some local sensors are missing from the standpoint of fusion center; some of local sensors may be interfered and then the conditional distributions of observations or some parameters of the distributions may be changed. Next, we will consider the above deteriorations, respectively. More complicated situations, such as some combination of above deteriorations, could be processed similarly.
(1 ) The Fusion Center Is Destroyed. If the fusion center is destroyed, each local sensor has to use its own decision rule to make the final decision for the two hypotheses. Owing to the absence of fusion center, we only compare the performances of the local sensors. As shown in Section 4.1, if an appropriate τ is taken, the FT-DDFF can outperform the DDFF at all local sensors.
(2
) Some of Local Sensors Are Missing. If some of local sensors are missing, the fusion center has to make a final decision using the available local decisions. We suppose that only one local sensor will be missing without loss of generalization. Table 2 reports the ratios of average system risk by the FT-DDFF to that by the DDFF for
Ratios of average system risk for missing local sensors with different noise variances.

From Table 2, we can see that, compared with the DDFF, the FT-DDFF decreases the average system risks, while some special sensors are missing and increase the average system risks if the remaining sensor is missing. Specifically, we have the following observations.
(i) For all kinds of situations, every
(ii) If Sensor 1 is missing, every
(iii) Combining the above with results in Table 1, we conclude that, compared with the DDFF, if the system is perfect, the FT-DDFF has better performances of both fusion center and local sensors; if one local sensor is missing, the FT-DDFF has a little improvement in average; in particular, the performance of fusion center uniformly has a little improvement if Sensor 1 is missing.
For Scenario A, the performances of both formulations given in Table 2 could be furthermore revealed in Figures 6 and 7. It shows that, compared with the DDFF, the performance of fusion center by the FT-DDFF is better when Sensor 1 or Sensor 2 is missing and worse as Sensor 3 is missing. Note that the ROCs of fusion center by the FT-DDFF and DDFF are almost identical while Sensor 2 is missing and are similar to that by the FF-DDFF while Sensor 3 is missing.

Comparison of system risks when one of local sensors is missing for Scenario A.

Comparison of detection probabilities at fusion center when one of local sensors is missing for Scenario A.
(3
) Some of Local Sensors Are Interfered. If some of local sensors are interfered, the conditional distributions of observations or their parameters may be changed. We suppose that only one local sensor would be interfered and its noise variance increases. Table 3 reports the ratios of average system risks by the FT-DDFF to those by the DDFF for Scenario A, where
Ratios of average system risks for interfering local sensors with different noise variances.
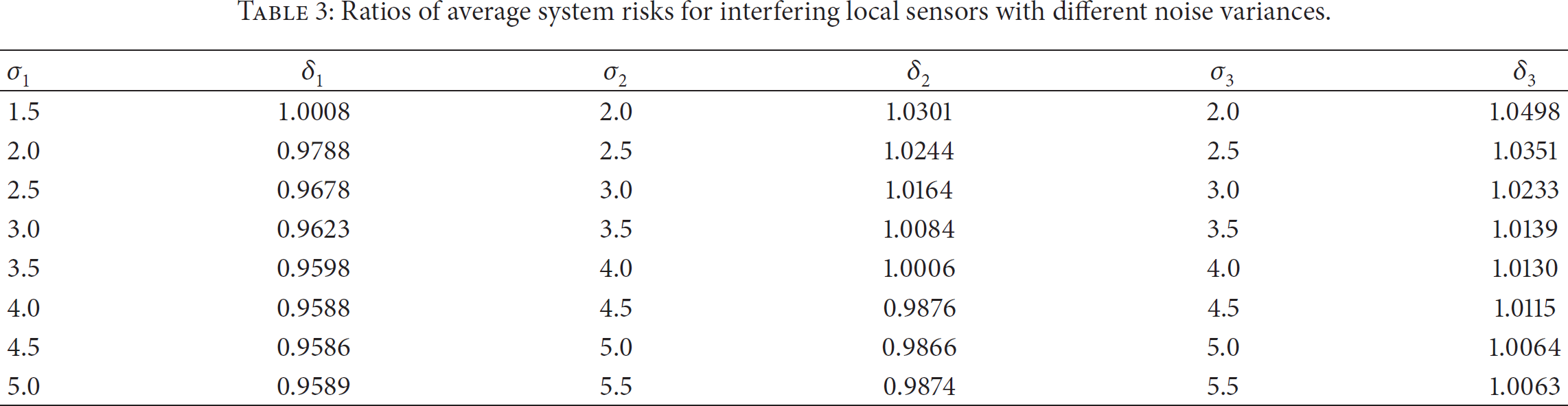
From Table 3, we can see that, compared with the DDFF, the FT-DDFF decreases the average system risks while the values of changed
(i) If Sensor 1 is interfered, the ratio
(ii) If
(iii) The above findings are consistent with the results in Table 2. This is as
For Scenario A, the performances for both formulations given in Table 3 with varying
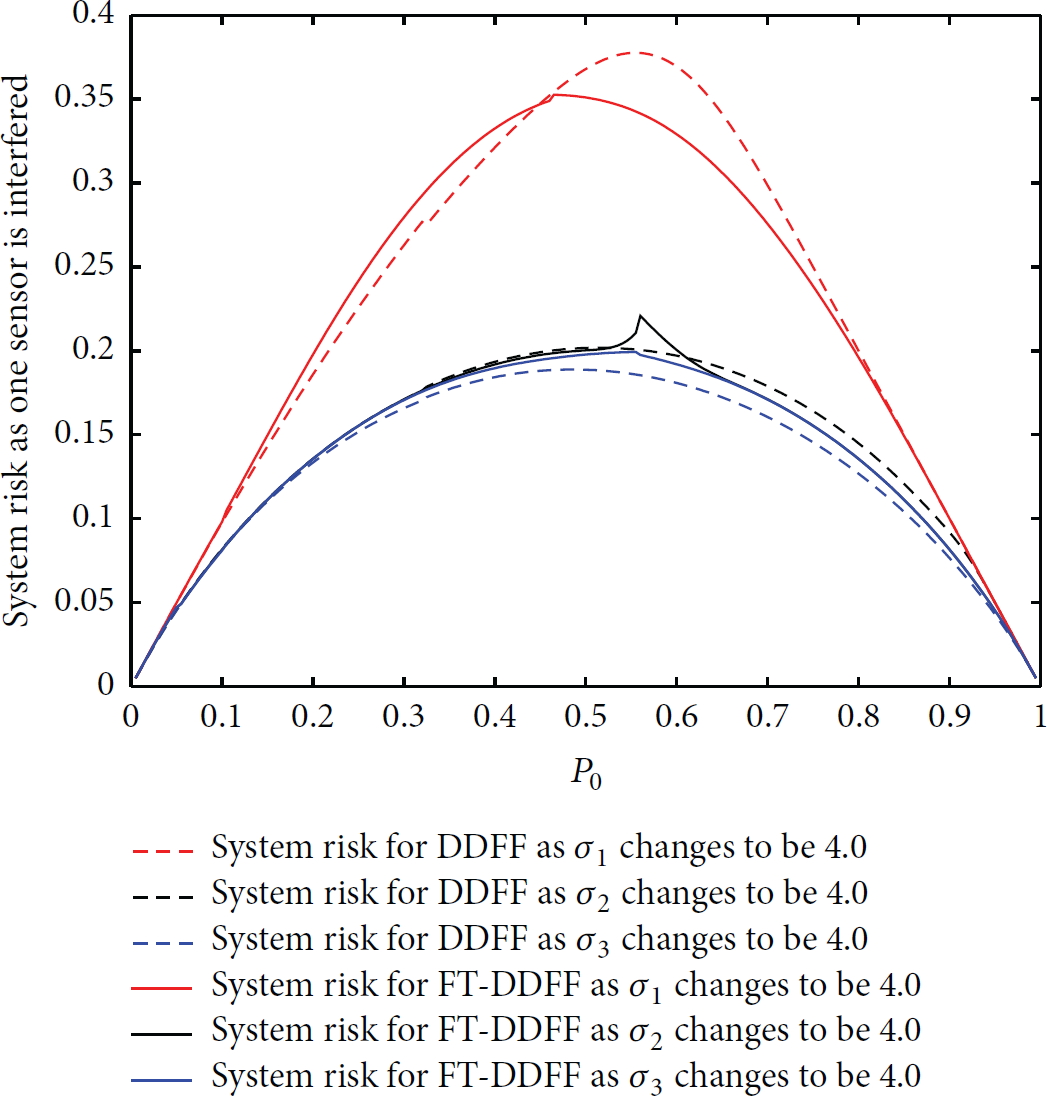
Comparison of system risks when one of local sensors is interfered for Scenario A.

Comparison of ROCs at fusion center when one of local sensors is interfered for Scenario A.
A lot of simulations also have the similar results for different values of
5. Conclusion
In this paper, we deal with the distributed detection fusion having fault-tolerance capacities. A new detection fusion strategy is proposed by minimizing the weighted sum of system risk and local sensor risks. We solve this team decision problem by the PBPO methodology and provide the FT-DDFF for fault-tolerant fusion rule and sensor decision rules. Although the FT-DDFF could not ensure an optimal solution to the original detection fusion problem, it does have some superiorities compared with the DDFF in average. The numerical examples confirm the above claims and show that the new detection formulation has more fault tolerance in some certain situations such as the destroy of fusion center, failure of some local sensors, and variety of distributions of sensor noises.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China under Grant no. 61374027, the Specialized Research Fund for the Doctoral Program of Higher Education under Grant no. 20130181110042, and the National Key Basic Research Program of China under Grant no. 2013CB329405.