
Abstract
Wireless sensor network (WSN) technology has rapidly spread into many fields. Recently, this technology has come to the forefront among the scientific community. The usage of sensors and the possibilities of organizing them into networks have motivated several topics of research and have highlighted different means of addressing certain problems, of which one of the most important is communication. In this paper, we report a study of the communication performance of two generations of wireless motes (IRIS and LOTUS) in various real scenarios and environments. This study will assist decision-makers in choosing the most appropriate sensor technology for their specific applications and requirements.
1. Introduction
A wireless sensor network (WSN) is a set of nodes that form a cooperative network [1, 2]. Each node can process data using one or more microcontrollers, CPUs, or DSP chips. Each node is also equipped with a radio transceiver, which is typically a single omnidirectional antenna, and is powered by batteries or solar cells. The nodes often self-organize after being deployed in an ad hoc manner and communicate wirelessly.
At present, the use of wireless sensor networks is spreading dramatically. It is certain that within the next few years, Internet-accessible WSNs will span the world. This new technology can be used in various multidisciplinary fields, such as environmental monitoring, military applications, medicine, entertainment, transportation, homeland defense, crisis management, and smart spaces [1, 3]. Existing WSNs are used on land, underground, and underwater [4].
WSN applications can be classified into two categories: (1) tracking and (2) monitoring [4–6]. Tracking applications include the tracking of humans, animals, vehicles, and objects. Monitoring applications include health and wellness monitoring, indoor/outdoor environmental monitoring, power monitoring, inventory location monitoring, seismic and structural monitoring, and factory and process automation.
This new technology faces several challenges and constraints, which differ depending on the environment in which the network is deployed. Many of these challenges are related to communication, which impacts network performance.
Many of the applications that we encounter throughout our daily lives rely on sensor networks (wired and wireless). For example, at King Fahd University of Petroleum and Minerals (KFUPM), there are surveillance cameras, fire and temperature sensors, and even light switches controlled by passive infrared (PIR) sensors.
Several nonfavorable factors must be considered when implementing a WSN in a real test environment, such as difficulty of implementation, the possibility of hardware failure, and the necessary financial investment [7, 8]. The choice of appropriate equipment and devices to achieve a task is one of the most important factors in ensuring its success. When we build a new wireless sensor network, we must select the most suitable motes to ensure excellent application performance. Currently, MEMSIC [9] provides a variety of motes and sensors that can be used anywhere to realize advanced tracking, monitoring, automation, and control solutions for a range of industries. LOTUS, IRIS, MICAz/MICA2, TelosB, and Cricket are all types of motes produced by MEMSIC, and all of them have different features.
In this paper, we evaluate the communication performance of two generations of sensor motes: IRIS [10] and LOTUS [11]. We use the radio signal strength indicator (RSSI) as a measure of the communication quality. We also consider the packet drop rates to evaluate the performance of these two motes. The primary problem that we wish to address is that of how to choose the most appropriate motes for different scenarios and environments. To the best of our knowledge, this is the first study conducted for the performance evaluation of IRIS and LOTUS wireless sensor motes in real environments.
We are not aware of any previous research in which the performance of these motes has been evaluated in a real environment, although such an evaluation will provide valuable information for decision-makers to use to select the best type of sensor for a specific application. Therefore, through this research, we wish to provide a comprehensive comparison between two generations of wireless sensor network systems, that is, IRIS and LOTUS.
This paper is organized as follows. Section 2 presents a preliminary review of the literature, in which similar studies and related works are described. Section 3 introduces the hardware and software requirements for IRIS and LOTUS wireless motes. Section 4 explains the experimental design principle and experimental scenarios. This chapter also addresses practical issues such as the setup of the test bed and the implementation of the experiments. Section 5 provides a detailed description of the experiments and analyzes the results. Section 6 offers a general discussion of the results, and Section 7 concludes the paper by summarizing our work and recommendations and offering suggestions for future work.
2. Similar Studies
The closest study to our work was conducted by Harun et al. [12]. The authors performed a comparative evaluation of three types of WSN devices, namely, IRIS, Xbee-PRO, and Microchip, for an application on a mixed-crop farm. Experiments were conducted in a large, open grass field to compare and evaluate the performances of the three types of motes at different antenna heights using the RSSI as a measure of communication quality. The location of the base station remained fixed throughout the experiments, whereas the remaining motes were placed at different distances from the base station in a straight line. The experiments were performed using antenna heights of 15 cm and 1 m. As the authors reported, there are two important factors that influence the performance of WSN nodes: the antenna height and the type of antenna used. After analysis of the experimental results, it was found that the Xbee-PRO motes performed better than the other motes. In our analysis, we will also use the RSSI as the primary measure of performance. However, we will compare different motes and also their performance in different environments.
Chakraborty et al. [13] presented a new approach to indoor localization in which LOTUS motes are used. They utilized a modular sensor board to plug on the LOTUS mote. This sensor board captures acoustic signals and then digitizes them. The localization was done by making use of the time difference of arrival method and a least squares approximation technique. This was one of the first studies to use LOTUS motes which we also use in our work.
Angela et al. [14] presented an environmental surveillance system using WSNs to monitor and locate moving behavior of people. They used one mote as a base station and the other sensor nodes to sense the environment and collect some data such as temperature and light. The collected data is sent immediately to the base station. They use IRIS motes to implement that system where the motes were distributed in different places in a building. MoteView interface was used for monitoring and deployment. In our work, we also use IRIS motes in a similar setup; that is, one of the motes is designated as a base station while the others act as sensors.
Foong et al. [15] have reported on signal strength behavior in both indoor and outdoor environments. The authors used two MICA sensor nodes; one for transmitting signals and the other for receiving and measuring signal strengths. They varied the distance between the two sensors from 10 and 80 feet. They found that the placement of the sensor nodes is always important. According to their study, the received signal strength will be higher if the sensor nodes are placed at some height point above the ground. In our experiments, we place the motes on small plastic tables at equal heights from the ground for all motes and the base station.
Glaser et al. [8] performed an extensive series of measurement to determine the correlation between the RSSI and the distance between nodes. The purpose of their study was to evaluate the accuracy of the position estimation achieved using Ubiquitous Device, which is a sensor network system in which communication is implemented based on the ZigBee standard. They used three nodes as sensors and one node as a base station or sink. All communications during this study were performed in single-hop mode. The authors used the RSSI as a measure to estimate the position of the target. In our analysis, we reveal the relationships between the measured RSSI values and the distances between the base station and the motes in various real environments.
Fasl et al. [16] performed an extensive series of measurements to determine if wireless networks using IEEE 802.15.4 radios provide reliable communication in steel bridge environments. Measurements were also taken to determine the impact on the network performances using four types of antennas. The performance of three types of high-gain antennas was compared with the stock 1.5 dBi, omnidirectional whip antennas. The three commercial antennas included a 9 dBi, omnidirectional, whip antenna; an 8 dBi, flat patch (directional) antenna; and an 8 dBi, right circular polarized (RCP), flat patch (directional) antenna. The results showed some improvements in network performance when high-gain antennas are used in an open field, but that improvement was inconsistent on steel bridges because of reflections (or multipath effect). In our study, there were some obstacles between the sender motes and the base station and we aim to observe the impact of those obstacles on the signal strength for both motes IRIS and LOTUS.
Linderman et al. [17] provided an experimental investigation of the wireless communication characteristics of the Imote2 smart sensor platform. They presented a qualitative discussion of wireless communication and packet delivery; a quantitative characterization of wireless communication capabilities of the Imote2 platform is provided, in addition to an assessment of onboard and external antenna performance. Therein, the authors mentioned that the environment, including building materials and other wireless networks, can significantly reduce reception rate and thus increase packet loss. In our study, we use packet dropping as one of comparison criteria between IRIS and LOTUS. We show the impact of different environments on packet dropping.
Pei et al. [18] performed an experimental study to investigate the reliability issue of applying wireless sensing to structural health monitoring. The authors used an off-the-shelf microcontroller and radio components to highlight the important attributes of packet and data delivery performance. They used Motorola 68HC11 development board as a microcontroller and MaxStream 9XStream (900 MHz) for radio. They reported in their study that among all the factors, the attenuation from the building materials, the transmitting range, and transmitting power of the radio dominate the packet delivery performance. In our study, we examine the motes in different environments and change the transmitting range to observe the performance for each mote type.
3. Hardware and Software
In this section, we will introduce the hardware and software that were used in our experiments. We will begin first by describing the IRIS and LOTUS motes and then describe the software packages that were used to collect the measurements and plot the data.
3.1. Hardware
In our experiments, we used two generations of motes, IRIS and LOTUS.
3.1.1. IRIS
IRIS is one of the newer generations of motes from MEMSIC. The XM2110 mote model (2400 to 2483.5 MHz) uses Atmel RF230, IEEE 802.15.4 compliant, and ZigBee-ready radio frequency transceiver integrated with an ATmega1281 microcontroller (see Figure 1) [10]. Table 1, shows some other features of IRIS motes. We used MIB520 USB interface boards to provide USB connectivity to the IRIS motes for communication and in-system programming. The interface board also supplied power to the device through the USB bus (see Figure 2(b)) [9].


(a) IRIS mote top view; (b) IRIS mote bottom view.

(a) MDA100 sensor board and (b) MIB520 USB interface board.
In addition, we used MDA100 sensor boards with both the IRIS and LOTUS motes. This board has a precision thermistor, a light sensor/photocell, and a general prototyping area [19] (see Figure 2(a)).
3.1.2. LOTUS
LOTUS is an advanced wireless sensor node platform. It is built around the low-power Cortex M3 CPU and also includes an 802.15.4 compliant radio. The LOTUS platform features several new capabilities that enhance the overall functionality of MEMSIC's wireless networking products and is compatible with MDA and MTS sensor boards (see Figure 3). A LOTUS mote can be used as a base station linked by a cable to a laptop via the USB port [11]. Table 1 shows some other features of LOTUS motes.

(a) LOTUS mote top view and (b) LOTUS mote bottom view.
3.2. Software
We used MoteView and LotusView, which are designed to interface with the sensors used in the study. These two applications provide tools that simplify deployment and monitoring. The software also makes it easy to connect to a database and to analyze and graph sensor readings.
In our study, we used multihop communication to analyze and monitor the packet interarrival times. The XSniffer tool allowed us to monitor multihop communication over XMesh. XSniffer runs on a PC and uses an IRIS or LOTUS mote to monitor RF packet traffic. More details about XMesh, XSniffer, MoteView, and LotusView are provided in [20].
4. Methodology
As mentioned earlier, the primary objective of this study was to evaluate the performance of two generations of WSN motes, namely, IRIS and LOTUS, when they are communicating in different environments. In this study, we used one node as base station surrounded by three other nodes as shown in Figure 4. In this section, we will discuss our experimental setup and our assumptions.
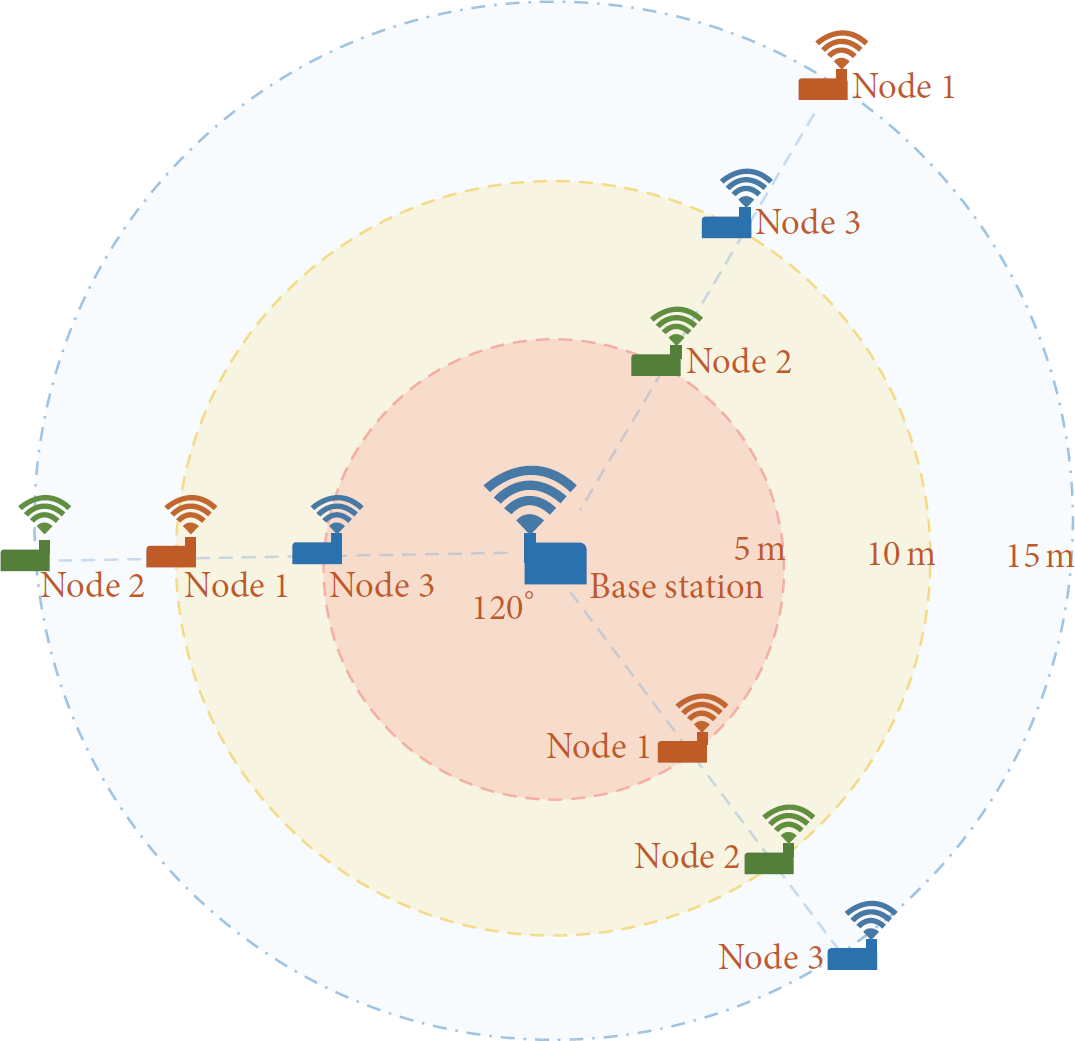
Scenario I: one base station surrounded by three nodes. The distance between the base station and each node was 5 m in the first experiment, 1 m in the second experiment, and 15 m in the third experiment for all environments.
Both IRIS and LOTUS motes can be programmed to operate in high-power (HP) mode or low-power (LP) mode. The difference between these two settings is mainly in the latency of the transmissions. The LP mode, which utilizes a sleep function that powers off all unnecessary electronics between operations, has a high latency and low bandwidth consumption compared to the HP mode. We used the HP mode for all of our experiments. We set the data message interval (DMI) to 3 seconds, meaning that each mote sent one packet every 3 seconds.
We will use three criteria for evaluation. The first is the RSSI, which reflects the sensitivity of the signal to the surrounding environment. The second measure considered is the packet drop rate. A high packet drop rate has a noticeable impact on communication quality and may lead to communication failure. The third criterion is based on a packet arrival analysis.
In our experiments, we operated, monitored, and evaluated the two types of motes in the following scenarios.
4.1. Scenario I
In this scenario, the base station was placed in a central position surrounded by three nodes. The distance between the base station and each other node, one in each of three different directions, was set to 5 m in the first experiment, 10 m in the second experiment, and 15 m in the third experiment for each direction, as shown in Figure 4. This scenario was implemented in six different environments (an open area, a closed area, under soil, under sand, a palm field, and a maize field) for each type of mote, for a total of 36 experiments; the data was collected for one hour in each experiment (3 distances, 6 environments, and 2 types of motes). We measure the RSSIs and packet drop rates in this scenario. For each configuration, we determined the average RSSI and the average percentage of packets dropped. We used MoteView to monitor the IRIS motes and LotusView together with XSniffer to monitor the LOTUS motes. We converted the raw RSSI values into units of dBm using the information provided by Bardwell [21] and Atmel Co. file [22].
4.2. Scenario II
Scenario I presented above was suitable for evaluating the RSSI and packet drop rates; however, it is not suitable to study the performance of multihop routing as all the nodes are only one hop away from the base station. We designed Scenario II to see the impact of multihop routing on packet arrival (see Figure 5). Multihop routing involves sending packets through multiple hops instead of over one long pathway, which means that each packet requires a long time to reach its destination. In this scenario, we performed a total of 12 experiments (2 types of motes and 6 environments). We do not synchronize the base station and slave motes; we, however, ran this experiment for long time (3 hours for each experiment) and then took the average of all collecting data.
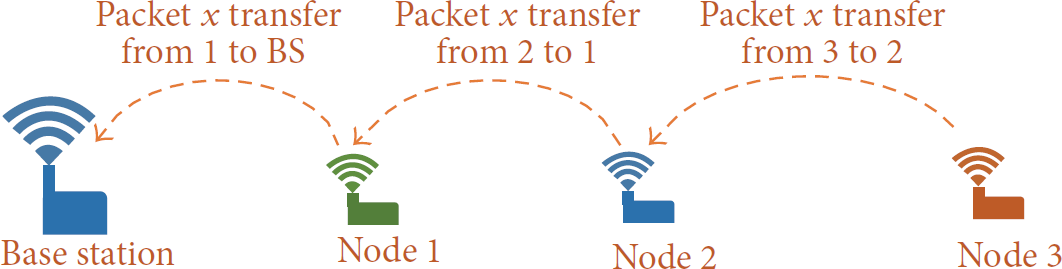
Scenario II packet x is transferred from node 3 to node 2 and then from node 2 to node 1 and finally from node 1 to the base station.
5. Field Experiments and Results
In this section, we discuss the results of our field experiments. As mentioned in Scenario I, this study was implemented in six different environments; each subsection discusses one environment in which the experiments were performed. We combine all of the results for Scenario I in Figures 6–9.

IRIS motes: RSSI results for the six experiments.

LOTUS motes: RSSI results for the six experiments.

IRIS motes: dropped packet percentages for the six experiments.

LOTUS motes: dropped packet percentages for the six experiments.
5.1. Closed Area
The primary objective of this experiment was to demonstrate the performance of the two types of motes in a closed area with no wind, dust, or any type of obstacle between the motes and the base station. We conducted this experiment in a large gym (Building 11 on the KFUPM campus) during spring vacation when no one else was present at the gym.
The RSSI results (Figures 6 and 7) show that the LOTUS motes performed better than the IRIS motes according to the RSSI readings; however, in general, both types of motes performed very well in this environment.
Packet dropping or packet loss is one of the most important issues when it comes to evaluating the performance of any network. In this study, we measure this percentage using the data received from the nodes in each environment. The results in Figures 8 and 9 show the percentage of packet dropping for IRIS and LOTUS for all experiments.
Figure 10 shows the packet interarrival times in seconds, which were obtained by using XSniffer to monitor the arrival of packets at the base station. We used the second experimental scenario for this measurement, in which mote 3 sent a packet to mote 2 and then forwarded it tomote 1, after which it was sent to the base station; at that time, XSniffer sniffed the received packet and accurately recorded the time.

Histogram of packet interarrival times for the closed area experiments.
The results indicate that the LOTUS motes performed slightly better than the IRIS motes; however, in general, both motes performed well in this environment.
5.2. Open Area
This experiment was conducted in the province of Shabwah, Yemen, in a flat, open area with no buildings. The purpose of this experiment was to demonstrate the performance of the motes under normal weather conditions in an open area where it is not highly windy, dusty, or rainy.
The RSSI results obtained in the open area experiments for both the IRIS and LOTUS motes (Figures 6 and 7) indicate a significant difference between the two types of motes, primarily at a distance of 5 m, at which the performance of the LOTUS motes was distinctly superior; however, the difference in performance gradually decreased with increasing distance.
From Figures 8 and 9, IRIS motes lost more packets than did the LOTUS motes, but the difference was not significant between them. The percentage of packets dropped also increased with increasing distance, which is expected.
The packet interarrival times are shown in Figure 11. The packet interarrival times were between 2.85 and 3.25 seconds, and the majority of the measured times were approximately 3.09 seconds; this value is greater than that for the closed experiments, which was 3.01 seconds. This result can be explained by the conditions of the surroundings, such as the presence of wind and dust, which caused the packets to require more time to reach the base station.

Histogram of packet interarrival times for the open area experiments.
From these results, we see that the differences between the IRIS and LOTUS motes in this environment were not significant. Both performed excellently, although the LOTUS motes demonstrated a slight advantage.
5.3. Palm Field
These experiments were conducted in a large palm field, in which the trees were separated by 3 m. This area was a low-density vegetation environment, which was expected to allow signals to travel easily between the motes and the base station.
As expected, both types of motes performed well in terms of the RSSI, with a small advantage for the LOTUS motes (Figures 6 and 7). From the percentages of dropped packets (shown in Figures 9 and 10), we can observe that the LOTUS motes dropped 5.43% of the sent packets; this performance is relatively poor but still better than that of the IRIS motes, which dropped 7.28% of the sent packets.
Figure 12 shows the packet interarrival times for the IRIS and LOTUS motes. These values were between 2.85 and 3.33 seconds, with the majority of packet interarrival times being approximately 3.11 seconds. This 0.11 additional time compared with the open area experiments can be attributed to the palm trees, which acted as obstacles between the motes and the base station and may have affected the packet travel.

Histogram of packet interarrival times for the palm field experiments.
These results illustrate the performance of these two generations of motes in an environment with multiple sparse obstacles. The LOTUS motes performed better than the IRIS motes, which nevertheless worked well at short distances.
5.4. Maize Field
For these experiments, we selected a large maize (corn) field with a high vegetation density. The primary objective of this experiment was to demonstrate how the vegetation density affects the signal.
The RSSI results for the maize field (Figures 6 and 7) clearly indicate the impact of the plants on the signal transfer behavior. The RSSI decreased dramatically from approximately −65 to −85 dBm for the IRIS motes, and it also decreased for the LOTUS motes, from −64 to −79 dBm. Accordingly, we can conclude that the signal is more sensitive when there is a high plant density in the environment.
From Figures 8 and 9, it is evident that both types of motes are affected by their surrounding environment. The IRIS motes, for example, lost approximately 10% of the sent packets at 15 m, which is considered to be a high rate that may affect communication quality.
Figure 13 shows the impact on the packet interarrival times. The packet interarrival times were between 2.82 and 3.35 seconds, with the majority being approximately 3.13 seconds for IRIS and 3.08 seconds for LOTUS. The only explanation for these results is the plant density in the maize field compared with other environments.

Histogram of packet interarrival times for the maize field experiments.
The IRIS and LOTUS motes both performed well at short distances; however, the IRIS motes began to perform poorly as we increased the separation distance.
5.5. Under Sand
Certain WSN applications may require the use of sensor motes in the desert or other sandy environments, where they may quickly become covered by sand. In this experiment, we tested the performance of the motes when covered by sand. Similar to the study reported by Hill et al. [23], we buried the motes 10 cm underground and protected them with plastic boxes. To ensure that the plastic boxes will have no effect on the results, we placed motes inside them over ground before starting this experiment and found no impact on the signal.
The RSSI results (Figures 6 and 7) indicate lower performance compared with the previous experiments. The motes, however, were still functional and successfully sent data to the base station at short distances, such as 5 m. The RSSI level dropped dramatically from −82 dBm at 5 m to −89 dBm at 10 m for the IRIS motes, and connectivity was lost at 15 m.
We conducted 3 Scenario I experiments using the IRIS motes and another 3 using the LOTUS motes. In these experiments, we dug three small holes in the ground at each distance in different directions and placed our sensors in these holes instead of placing them on the plastic tables.
Poor signal quality will certainly affect the packet drop rate, as is evident in Figures 8 and 9. For both types of motes, packets were dropped at a high rate. For example, the IRIS motes lost approximately 15% of the sent packets, which is an enormous amount for WSN systems and is likely to affect the efficiency of any such system.
Figure 14 shows the packet interarrival times for both the IRIS and LOTUS motes; as seen from the figure, the packet interarrival times were between 2.87 and 3.4 seconds, with the majority being approximately 3.18 seconds. This result is expected given the poor RSSI performance.

Histogram of packet interarrival times for the under-sand experiments.
5.6. Under Soil
WSNs may be used by farmers to avoid damage to their crops or even to increase crop production by monitoring relevant parameters. For example, sensors can measure soil moisture and temperature and then wirelessly transmit the relevant data to the farmer. Such data can assist farmers in taking appropriate actions. To test the WSN communication performance for such an application, we buried the motes under dry soil at a distance of 10 cm underground, again protecting them with plastic boxes. We used the same procedures applied for the under-sand experiments.
The RSSI values (Figures 6 and 7) for separations of 5 and 10 m were extremely low. Connectivity was completely lost at 15 m for both the IRIS and LOTUS motes.
The poor performance observed for both types of motes in these experiments is reflected in the packet drop rates presented in Figures 8 and 9. For example, the IRIS motes lost approximately 20% of the sent packets at a distance of 10 m. This rate is unacceptable for any WSN system.
Figure 15 shows the packet interarrival times for both IRIS and LOTUS motes; the values were between 2.93 and 3.4 seconds, with the majority being approximately 3.21 seconds; these were the largest values among the results of all experiments because of the poor performance of the IRIS and LOTUS motes in this environment.

Histogram of packet interarrival times for the under-soil experiments.
6. Discussion
The packet drop rate is one of the most important factors in determining the efficiency of an entire WSN system. From the results of the previous section, we can identify an inverse relationship between the RSSI and the packet drop rate; that is, a higher RSSI corresponds to a lower percentage of dropped packets. In the underground experiments, we observed that both types of motes lose too many packets to be useful under these conditions. By contrast, the best environment, in which the highest percentage of packets was delivered, was the closed area environment.
In all of the experiments, the LOTUS motes demonstrated superior performance in comparison with the IRIS motes. However, the differences were not significant.
Based on this study, we offer the following recommendations:
Both types of motes can be used in closed areas with no obstacles at short or long distances. Both types of motes can be used in open areas with no obstacles but various nonsevere weather conditions at short or long distances. Both types of motes can be used in palm and maize fields at short separation distances, such as 5 m, between the motes. Neither type of mote is suitable for use underground. LOTUS motes offer better performance than IRIS motes; however, the difference is insignificant.
We believe that our findings provide valuable information to anyone who may wish to use wireless sensor technology in similar environments. These results may save time and effort for decision-makers with regard to choosing between IRIS and LOTUS motes.
7. Conclusions and Future Work
We found that a closed area is the ideal environment for the performance of both types of motes because the signal is not confronted with any obstacles and does not suffer from any adverse weather conditions that could impact its travel. Similarly, an open area was found to be one of the best environments for the wireless motes. There were no major obstacles in the field we used for our open area experiments, although weather conditions, such as wind and dust, may have impacted the RSSI results.
In the palm field and maize field experiments, the environments contained obstacles that certainly impacted the signal strength. It is clear from our results that these obstacles significantly affected the RSSI compared with the results from the open and closed areas. The RSSI values observed in the maize field were lower than those in the palm field because of the higher density of vegetation in the former case. For our last two sets of experiments, we buried our motes under sand and soil. The resulting performances were extremely poor. The investigated wireless motes were clearly not designed to operate underground, and as a result of our experiments, we do not recommend using either of them in underground conditions.
The results of experiments conducted on a real test bed were compared and analyzed to evaluate the performance of IRIS and LOTUS wireless motes. Anyone who has an interest in using either of these two types of wireless motes may find it useful to compare the application requirements with our results regarding the motes' performance in similar environments.
The IRIS and LOTUS motes performed ideally in certain environments and poorly in others. These two generations of wireless sensors were found to be effective in both closed and open areas, where they functioned extremely well over long distances; in such areas, the signals are not confronted by any obstacles causing noise or interference.
By contrast, in palm and maize fields, the performance of the IRIS and LOTUS wireless motes was unstable; it was acceptable at short distances, such as 5 m, but poor at 15 m. Nevertheless, both the IRIS and LOTUS motes exhibited substantially better performance in the palm field environment than in the maize field because of the higher vegetation density in the maize field, which could block or distort the signal.
The signal generated by these motes is exceedingly sensitive to the surrounding environment as is clear from the results of the under-sand and under-soil experiments. The performance of the IRIS and LOTUS wireless motes in these environments was extremely poor and connectivity was lost at 15 m. Based on this poor performance, we do not support the use of these motes underground.
In conclusion, our work provides valuable information that will assist anyone who wishes to apply wireless sensor technology in similar environments. This information may save considerable time and effort for such decision-makers with regard to selecting one of these two types of wireless motes.
In future, we intend to expand and improve this study. We would like to study the impact of additional interference on mote performance, which can be done by increasing the number of motes used in the experiments. We would also like to study how different data rates may affect performance.
Moreover, the environments included in our experiments were mostly static; we would like to study how motes perform in more dynamic situations, such as in the presence of human activity, machinery, or weather conditions such as rain, fog, or snow. Finally, we would like to expand our study to include other wireless sensor motes, such as Cricket, TelosB, and MICAz motes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The authors acknowledge the support provided by King Abdulaziz City for Science and Technology (KACST) through the Science and Technology Unit at King Fahd University of Petroleum and Minerals (KFUPM), which funded this work through Project no. 11-ELE1652-04 as part of the National Science, Technology and Innovation Plan.