
Abstract
It is a great challenge for wireless sensor network to provide enough information for targets localization due to the limits on application environment and its nature, such as energy, communication, and sensing precision. In this paper, a multiple targets localization algorithm with sparse information (MTLSI) was proposed using compressive sensing theory, which can provide targets position with incomplete or sparse localization information. It does not depend on extra hardware measurements. Only targets number detected by sensors is needed in the algorithm. The monitoring region was divided into a plurality of small grids. Sensors and targets are randomly dropped in grids. Targets position information is defined as a sparse vector; the number of targets detected by sensor nodes is expressed as the product of measurement matrix, sparse matrix, and sparse vector in compressive sensing theory. Targets are localized with the sparse signal reconstruction. In order to investigate MTLSI performance, BP and OMP are applied to recover targets localization. Simulation results show that MTLSI can provide satisfied targets localization in wireless sensor networks application with less data bits transmission compared to multiple targets localization using compressive sensing based on received signal strengths (MTLCS-RSS), which has the same computation complexity as MTLIS.
1. Introduction
Dramatic advances in wireless communication and microelectromechanical-system fabrication technology have enabled the use of wireless sensor networks (WSNs). There are a large number of sensor nodes in WSNs. The sensor nodes collect the properties of interest of their local environment and communicate and share information with their neighbors to improve their limited measurement or decision capabilities. WSNs have been considered for various monitoring and control applications, such as target detection, recognition, localization [1], and environmental monitoring [2].
Localization plays a vital role in wireless sensor networks design and application. It limits the development of research and application of wireless sensor network to a large extent, especially in unattended cases. Additionally, due to the constraints of energy and hardware, low-communication and computation localization becomes popular research area for wireless sensor networks. In particular, limited by environmental factors, information extraction technology, and uncertainly communication networks, the physical information for localization presents strong incompleteness [3], which brings great challenge for wireless sensor networks design.
In this paper, we consider the problem of multiple targets localization in WSNs, which is one of the key tasks in applications of WSNs. Various algorithms depending on device measurement have been proposed for targets localization, such as received signal strength (RSS), time-of-arrival (TOA), angle-of-arrival (AOA), and time difference of arrival (TDOA). Also, focusing on low-cost and low capability sensor networks, device-free localization (DFL) is another popular localization direction [4]. Different from the traditional localization technique, DFL realizes localization without hardware equipment. For example, [5] presented a signal dynamic model and adopted the geometric method and the dynamic cluster-based probabilistic cover algorithm to solve the DFL problem. Wilson and Patwari formulated the DFL as a radio tomography imaging problem and solved the problem with regularization method [6, 7]. The above works require that there should be sufficient number of wireless links to guarantee the localization performance, and these techniques will be infeasible when few wireless links are available. Considering the limit of the energy of wireless sensor network and information incompleteness, novel targets localization method using sparse information becomes one of hot topics in WSNs. Owing to the recent advances in sparse signal reconstruction for compressive sensing (CS), in this study, we consider the target locations as a sparse signal and reconstruct the signal using the CS technique. Considering binary-detected model, a multiple target localization algorithm with sparse information (MTLSI) is proposed using compressive sensing theory. MTLSI uses targets number detected by sensor node localizing targets. The targets position is defined as a sparse vector in the discrete space and the number of detected targets by sensor nodes is expressed as the product of measurement matrix, sparse matrix, and sparse vector in compressive sensing theory. We recovered the target location with Basis Pursuit (BP) [8] and Orthogonal Matching Pursuit (OMP) [9], respectively. Localization performance is analyzed with different sensing radius, nodes quantity, targets quantity, and measurement noise. Simulation results show the validity and superiority of MTLSI in targets localization.
The organization of the paper is as follows. In Section 2, related works on localization using compressive sensing is concluded and analyzed. In Section 3, network model and parameters are described. Multiple targets localization using compressive sensing algorithm is proposed. Simulation results are shown in Section 5 and the performance of MTLSI is analyzed in detail. Conclusion is drawn and future work is discussed in Section 6.
2. Related Works
In wireless sensor networks, limited by environmental factors, information extraction technology, and uncertain communication networks, the physical information for localization presents strong incompleteness. Localization in wireless sensor networks should be adaptive with the sparse information. Furthermore, it will be a good choice that the method has a lower computation, data transmission, and energy consumption, especially without extra hardware equipment for the sensor. Sometime, localization algorithm needs to balance the precision and all these limits. Recently, compressive sensing theory has shown great potential applied value in the field of sparse signal image processing. Applying appropriate reconstruction algorithm, compressive sensing theory can recover complicated image information from less measurements [10–12]. Considering that CS has excellent performance in signal reconstruction, it has been applied to realize traditional localization problem recently. In [13], wireless sensor network monitoring region was divided into N discrete grids, and target positions are modeled as a N-dimensional vector of K-sparse. The rationality of CS theory applying in the localization is demonstrated theoretically. A sparse recovery algorithm called greedy matching pursuit (GMP) is also proposed for target localization with good performance. The work achieves better performance in solving the traditional localization problem. However, the accurate measurement matrices need to be known a priori, which incurs plenty of measuring works. For the limited wireless sensor networks, it is a great challenge to provide the accurate measurements in many applications. For multiple targets in the network monitoring area, Chen et al. [14] proposed a localization method using compressive sensing theory, where received signal strengths is needed that lead to extra hardware function and energy consumption. Motivated by the observation that the location information of the target is not only sparse but changes slowly and continuously over time as well, [15] merged the Bayesian theory into the CS theory and proposed a novel RCS algorithm to reconstruct the gradually changed sparse signal. The RCS algorithm makes use of the space-domain and time-domain features of the signal. However, there is large communication and computation load. An optimal recovery mechanism is proposed in [16]; however, network has to transmit a large amount of iterative information among sensor nodes, which also causes more energy consumption. On the other hand, mobile device assistant is applied to CS-based localization. Aiming at an accurate indoor localization scheme, [17] applied the theory of Multitask Bayesian Compressive Sensing (MBCS) to indoor localization. The proposed scheme assembles the strength measurements of signals from the mobile devices (MDs) to distinct access points (APs) and jointly utilizes them at a central unit or a specific AP to achieve localization. It can alleviate the burden of MDs while simultaneously giving a precise estimation of the locations. Energy is a vital issue in wireless sensor networks design, and simultaneously reducing the communication cost of network in sparse information is also an important job in localization mechanism design. In paper [18], we proposed a CS-based localization method, where targets localization information is provided by the binary-detected model without hardware equipment. The initial measurements are not very accurate. But there is less data transmission and lower energy consumption. In this paper, the performance of the CS-based localization method MTLSI using binary-detected model is further analyzed and compared with multiple targets localization using compressive sensing based on received signal strengths (MTLCS-RSS) [14]. Simulation results show that algorithm MTLSI has equivalent localization precision with MTLCS-RSS while MTLCS-RSS depends on RSS measure and transmission.
3. Network Model and Parameter Definition
3.1. Network Model
Sensor nodes are randomly deployed in the network. Each node is static and location-aware; targets are also in static state. For the convenience of study, the monitoring region is defined as the square area of

The diagram of network.
3.2. Binary-Detected Model
We apply the binary-detected model in the localization algorithm. If target
3.3. Parameter Definition
The multitargets localization will be constructed as a compressive sensing sparse signal reconstruction problem, and the relative parameters matrix involved in the problem is defined as follows.
(1) Sparse Vector of Target Position Information
(2) Sparse Matrix

Taking

(3) Measurement Matrix

If sensor node
(4) Measurement Vector
(5) Sensing Matrix

The equation builds a relationship between the measurement vector and the target position information vector, then
Considering the measurement noise, the above formula

4. Multiple Target Localization Using Compressive Sensing Theory
4.1. Algorithm Description
According to compressive sensing theory [19], if recovering signals are sparse or compressible under a certain basis, we can acquire the sparse signal or its unique sparse representation with fewer noisy measurements through a recovery algorithm. Targets number sensed by each sensor node can easily be obtained. Considering the static wireless sensor monitoring network, there are only K nonzero values in the target position information vector
According to above statement, we can obtain the network localization information without the matrix
4.2. Orthogonalization of Sensing Matrix
As stated in CS theory, the successful recovery of a signal by CS has a great relativity with the characteristics of measurement matrix and sparse matrix. The matrix

By the definition in Section 3, the sparse matrix

In the case of noise,

This procedure has the same effect as orthogonalizing the two matrices [14]. Since
4.3. Localization Recovery Algorithm
According to the above analysis, multitargets localization in WSN can be properly solved by the sparse vector recovery algorithm of the CS. Among the existing recovery algorithms,
In the localization recovery algorithm, the input matrices are
(1) Sensors detect targets (2) Construct Y (3) Initialize (4) do set (5) Calculate new residual (6) (7) (8)
5. Simulation Results and Performance Evaluation
Simulation is done to evaluate the performance of the algorithm proposed in the paper. The monitored network is divided into
5.1. Localization Error
In this paper, localization error is defined as the average Euclidean distance between the real positions and the recovered positions of the K targets. It is shown as follows:

In (10), K is the total number of the targets with real positions
In the simulation, there are

MTLSI performances with noise measurements are also studied. Figures 3 and 4 show the localization error under SNR 15 dB and SNR 25 dB. The average localization error with BP and OMP are 19.07% and 20.62% under SNR 15 dB, respectively, and the average localization error with BP and OMP are 19.22% and 21.99% under SNR 25 dB, respectively. Localizing the same number of targets with MTLSI, the bigger the measurement noise is, the bigger the error is, which is consistent with the reality. Furthermore, the localization error is very close for the case with measurement noise and without noise. It indicates that MTLSI can tolerate a certain level of measurement noise.


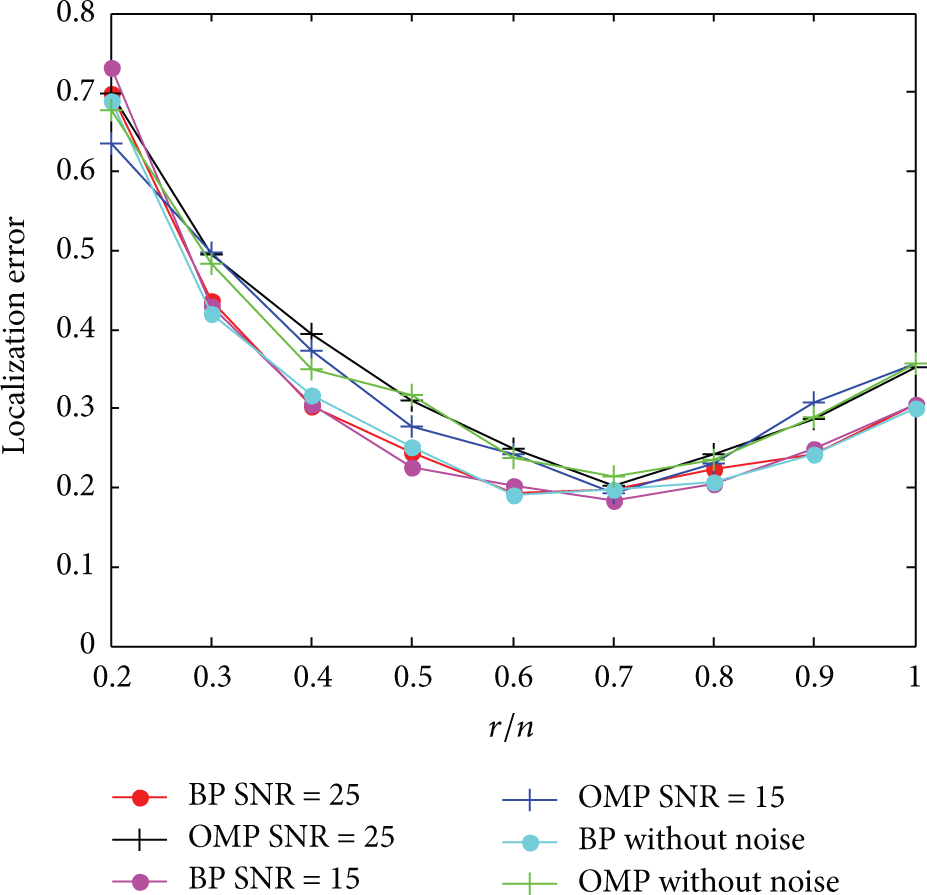
5.2. Localization Error versus Sensing Radius
The bigger the node's sensing radius, the higher the probability that the node detects more targets. Different sensing radius will lead to different measures matrix
Localization error versus sensing radius.
When
5.3. Localization Error versus Number of Targets
Under the parameters

Localization error versus number of targets.
5.4. Localization Error versus Number of Sensor Nodes
Under the parameters

Localization error versus number of sensor nodes.
5.5. Computation Complexity
MTLSI has the same computation complexity with the multiple targets localization algorithm using compressive sensing theory based on received signal strength (MTLCS-RSS) proposed in [14], with the same recovery algorithm, such as BP and OMP. The measurement in [14] is RSS, which depends on hardware device to acquire. Furthermore, there are some challenges to distinguish the RSS transmitted by different targets. In MTLSI, the measured value is 1 if the sensor has discovered the target or 0 if the sensor has not discovered the target. The data bits collected to localize target are small. With the same conditions, the performances of MTLSI and MTLCS-RSS are compared. Figure 8 shows localization error with different sensing radius, respectively, by OMP and BP recovery algorithm. No matter with OMP or BP, MTLCS-RSS works better than MTLSI. The localization error decreases monotonically with the increasing sensing radius by MTLCS-RSS. As mentioned in Section 4.2, there is an inflection point at

Localization error versus sensing radius.
Figure 9 shows the localization error varying with the targets number. With OMP recovery method, MTLSI and MTLCS-RSS have the same tendency. The more the targets, the lower the localization error. The results meet the expected design objective. With BP recovery methods, MTLCS-RSS works better than MTLSI. The localization error increases with the increasing targets number, but the localization is totally lower than 25%. There is no big difference between the two methods in the localization performance varying with the targets number.

Localization error versus number of targets.
Figure 10 shows localization error varying with the number of sensor nodes. Both MTLSI and MTLCS-RSS provide a decreasing localization error with increasing number of sensor nodes. It is rational that the more the information can be used, the more precise the targets' position can be acquired. The localization error is not more than 35%.

Localization error versus number of sensor nodes.
Comparing with Figures 8–10, some conclusion can be made. BP recovery method works batter in both MTLSI and MTLCA-RSS for OMP is a proximal greedy recovery method. MTLSI owns the same performance with MTLCS-RSS with OMP recovery method, while MTLCS-RSS works better than MTLSI with BP recovery method. It is attributed to the more precise RSS measurements and BP recovery mechanism. On the other hand, MTLSI can deliver the satisfied localization performance with low data bits transmission and extra hardware equipment.
6. Conclusion
In this paper, considering hardware measurement cost in wireless sensor networks localization, we use targets number sensed by each node to induce the targets position. It is a range-free algorithm. On the other hand, the localization information shows sparsity for the network characteristic and environment. We applied compressive sensing theory to the localization mechanism MTLSI, using preprocessing to induce incoherence needed in the CS theory and postprocessing to compensate for spatial discretization caused by grid assumption. The positions of target are represented as a sparse vector, and the number of detected targets by sensor nodes is expressed as the product of measurement matrix, sparse matrix, and sparse vector in compressive sensing theory. The sparse vector of target positions is reconstructed by Basis Pursuit (BP) and Orthogonal Matching Pursuit (OMP). MTLSI performance under different measurement noise, sensor radius, targets number, and sensor nodes number is investigated. Simulation results validate that MTLSI can satisfy the multitarget localization accuracy requirement in the case of incomplete information. When
Footnotes
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
This work is supported in part by Natural Science Foundation of China under Grant no. 61104208 and by Tianjin Natural Science Foundation under Grant no. 13JCQNJC00800.