
Abstract
The advent of the Internet of things (IoT) is changing the way how we interact with the physical world. However, the current Internet suffers from exponential increase in bandwidth demand. In order to resolve the bandwidth issue, we can consider aerial networks by unmanned aerial vehicles (UAV) or the so-called drones for establishing a three-dimensional mobile network in an ad hoc manner. By deploying a network from the sky, we can use the otherwise idle wireless medium and high mobility free from ground obstacles. Aerial networks are especially effective for supporting the temporary surge of population as well as disaster areas because building an additional network infrastructure requires extensive time. In this paper, we propose an efficient handover mechanism for aerial networks in the three-dimensional space, which significantly differs from the conventional two-dimensional schemes. The proposed scheme adjusts the height of a drone and the distance between the drones. To this end, we use the seamless handover success probability and the false handover initiation probability in order to evaluate the optimal coverage decision algorithm. To the best of our knowledge, the proposed scheme is the first attempt for resolving handover of net-drones in the three-dimensional space.
1. Introduction
With the advance of wireless communication technology, our daily life has greatly changed in every aspect. In particular, the Internet of things (IoT) is one of the most rapidly emerging future technology [1–3]. By introducing IoT, various devices in the physical world can be connected together, which will fundamentally change our daily life. Consequently, the need is fast growing for anytime anywhere communication, especially in the areas with increased activity [4].
Hence, the current Internet architecture experiences exponential increase in bandwidth demand. As a promising solution to the bandwidth issue, the idea of aerial networks by using unmanned aerial vehicles (UAV) or drones is proposed [5, 6] as shown in Figure 1, which is termed as net-drones in this paper. By deploying an aerial network from the sky, we can utilize the otherwise idle wireless medium as well as high mobility free from ground obstacles. Aerial networks are particularly useful for providing network service in case of the temporary surge of population and disaster areas, where establishing an additional network infrastructure needs extensive time and cost.

Illustration of net-drones.
However, the idea of net-drones needs to resolve several technical issues. First, the current typical drones can be used as a Wi-Fi access point (AP) due to the limited payload because the hardware for Wi-Fi is generally much lighter than that for LTE [7]. Second, in the traditional Wi-Fi networks, it is difficult to perform seamless handover because a traditional Wi-Fi network not only has a narrow communication coverage compared to a cellular network but also gives a relatively long handover time [8]. Furthermore, traditional handover decision algorithms typically assume that the coverage of each AP is the same, which does not apply to net-drones with different altitudes in the three-dimensional space [9].
In this paper, we propose a coverage decision algorithm for seamless handover of net-drones. Based on the information of the received signal strength (RSS), net-drones find their optimal coverage by adjusting their height as well as distance from other drones. In particular, our contributions can be summarized as follows.
We propose a handover algorithm that takes into account the heterogeneous coverage of net-drones due to the three-dimensional distribution. Then, we present the optimal coverage decision algorithm that makes the coverage of net-drones the same for improving the network performance of net-drones.
The rest of the paper is organized as follows. In Section 2, we give background on net-drones, handover procedure, and Mobile IP. Then, we explain handover of net-drones in the three-dimensional space in Section 3. In Section 4, we present the proposed optimal coverage decision algorithm. We carry out simulation study to verify the performance of the proposed scheme in Section 5. Our conclusion follows in Section 6.
2. Background
2.1. Net-Drone
In case of either a sudden surge of network population or disasters, it is formidable due to extensive time and cost consumption to establish an additional network infrastructure on the ground. A more feasible solution is to set up a mobile ad hoc network, which can be deployed in real time. However, in disaster areas, ground network installment is limited due to various obstacles such as piles of debris or rubble from collapsed buildings existing.
With the recent surge in unmanned aerial vehicles (UAV) technology, an aerial network by using drones is a promising solution to the problem. In addition, an aerial network can use the otherwise unused wireless medium with high mobility free from ground obstacles. In fact, industry giants such as Google and Facebook are developing balloons and solar panel airplanes to provide network infrastructure on a nation-wide scale. Here, we introduce the term net-drone for drones that can construct a network infrastructure on demand.
Figure 2 shows an illustration of an extended coverage by deploying net-drones. Consequently, when the performance of the original network infrastructure is degraded due to unexpected events such as sudden increase in population or disasters, we can deploy net-drones to set up an emergency network infrastructure. Then, a fleet of net-drones can provide on-demand network service to users from the sky.

An example of extended coverage by net-drones.
The deployment of net-drones can improvise a network infrastructure without installing new ground infrastructure nodes. Furthermore, net-drones are primarily designed as aerial infrastructure nodes, and the service provider can utilize them to enhance the network quality of experience (QoE) for the service users. When the service provider wants to deploy net-drones, it will be deployed with groups of multiple drones which will continuously collect information about links, traffic, and neighboring drones. Based on the collected data, the information in net-drones can be exploited to provide enhanced network access to users nearby.
2.2. Wi-Fi Handover Procedure
Here, we briefly explain the handover procedure of Wi-Fi. Wi-Fi handover is divided into layer 2 (L2) handover procedure and layer 3 (L3) handover procedure. The L2 handover procedure includes the process of sharing channel information among the base stations, the AP search process, and AP selection, as well as the authentication process. The L3 handover procedure actually performs the handover and includes the care of address (CoA) creation as well as the binding table production process. Wi-Fi handover starts with the AP selection process followed by the AP search process and then the authentication process and finally the association process. Figure 3 shows the overall Wi-Fi handover procedure [10].

Wi-Fi handover procedure.
Related work indicates that the total handover time can exceed 2 seconds, and each phase contributes to the total handover time by a different amount [11]. However, the important factor is that sufficient L2 handover time and L3 handover time are needed to satisfy seamless handover among Wi-Fi networks [12]. If a sufficient L2 and L3 handover times are not ensured, a user can be lost from the overlapped area while performing the handover procedure. As a result, seamless handover will fail because the user will try to connect to a new AP after the communication is broken with the previous AP.
In order to resolve this issue, in this paper, we consider a centralized architecture with an access controller (AC), which means that all the data traffic is handled at AC, and wireless terminal points (WTP) serve only as media changing entities. In comparison with a general Wi-Fi network, the network with AC stores security information and AP context within the AC and does not distribute to the WTPs to enhance security. Consequently, the L2 handover time can be reduced.
2.3. Mobile IP
Here, L3 handover is performed based on Mobile IP [13], which is a representative solution among those for the existing global mobility. Mobile IP supports mobility across both homogeneous and heterogeneous systems. It introduces three new functional entities: home agent (HA), foreign agent (FA), and mobile node (MN). Mobile IP supports mobility management using the following procedures: discovery, registration, routing, and tunneling. The overall architecture of Mobile IP is shown in Figure 4.

Mobile IP architecture [14].
When an MN moves from one subnet to another, the MN obtains a new CoA. Then, the MN registers the new CoA with its HA. The HA sets up a new tunnel up to the end point of the new CoA and removes the tunnel to the old CoA. Once the new tunnel is set up, HA is able to send the packet to the MN using MN's new CoA.
However, Mobile IP has the following shortcomings: triangular routing problem and the old CoA registration problem. Packets sent from a CN to an MN are first intercepted by the HA and then tunneled to the MN. This issue is called the triangular routing problem, which makes communication routes significantly longer than the optimal routes and introduces extra delay in packet delivery. On the other hand, when an MN moves from one subnet to another, the new FA cannot inform the old FA about the new movement of the MN. Hence, packets are already tunneled to the old CoA, and packets in flight are lost. This is the old CoA registration problem. The triangular routing problem and old CoA registration problem can be resolved by route optimization shown in Figure 5.

Handover procedure by route optimization.
When the MN moves to the new FA coverage, the new FA assigns a new CoA to the MN. Then, the new FA informs the previous FA of the new FA. The previous FA receiving the new CoA information updates the binding table and sends a binding acknowledgment message to the MN. This process ensures not only that packets in flight to the old CoA are successfully forwarded but also that packets from the CN without a date binding table for the MN are successfully delivered to the MN's new CoA. Besides, the triangular routing problem is resolved by sending mapping information which includes the old IP being moved to the new CoA.
3. Handover of Net-Drones
In this section, we introduce design issues in handover for net-drones. First, we explain the key difference between the conventional handover in the two-dimensional space and net-drone handover in the three-dimensional space. Then, we introduce the two important metrics for designing a handover mechanism, that is, seamless handover success probability and false handover initiation probability.
3.1. Net-Drones in the Three-Dimensional Space
The critical difference of net-drone handover from the conventional network is that net-drones are located in the three-dimensional space as shown in Figure 6, while the conventional network is in the two-dimensional area. As in Figure 6, the coverage of a net-drone can be calculated as follows:

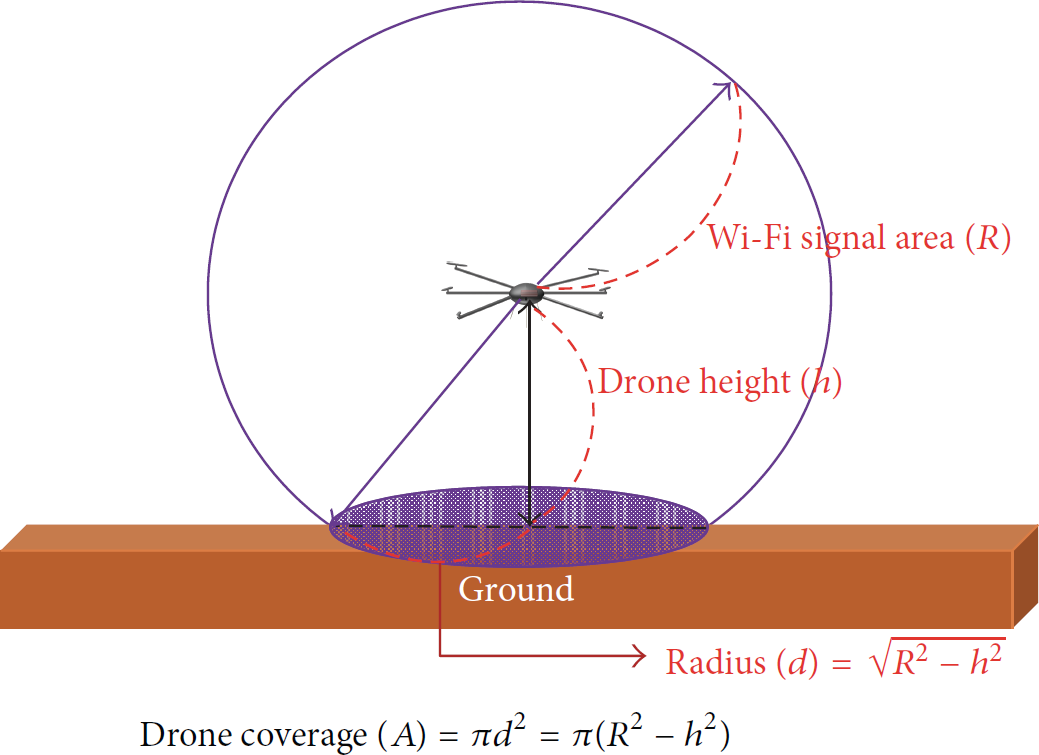
Drone coverage in the three-dimensional space.
There exist extensive studies on handover decision algorithms [9]. Among these algorithms, the optimal coverage decision algorithm is based on the received signal strength (RSS), which is calculated as follows:

In (2),

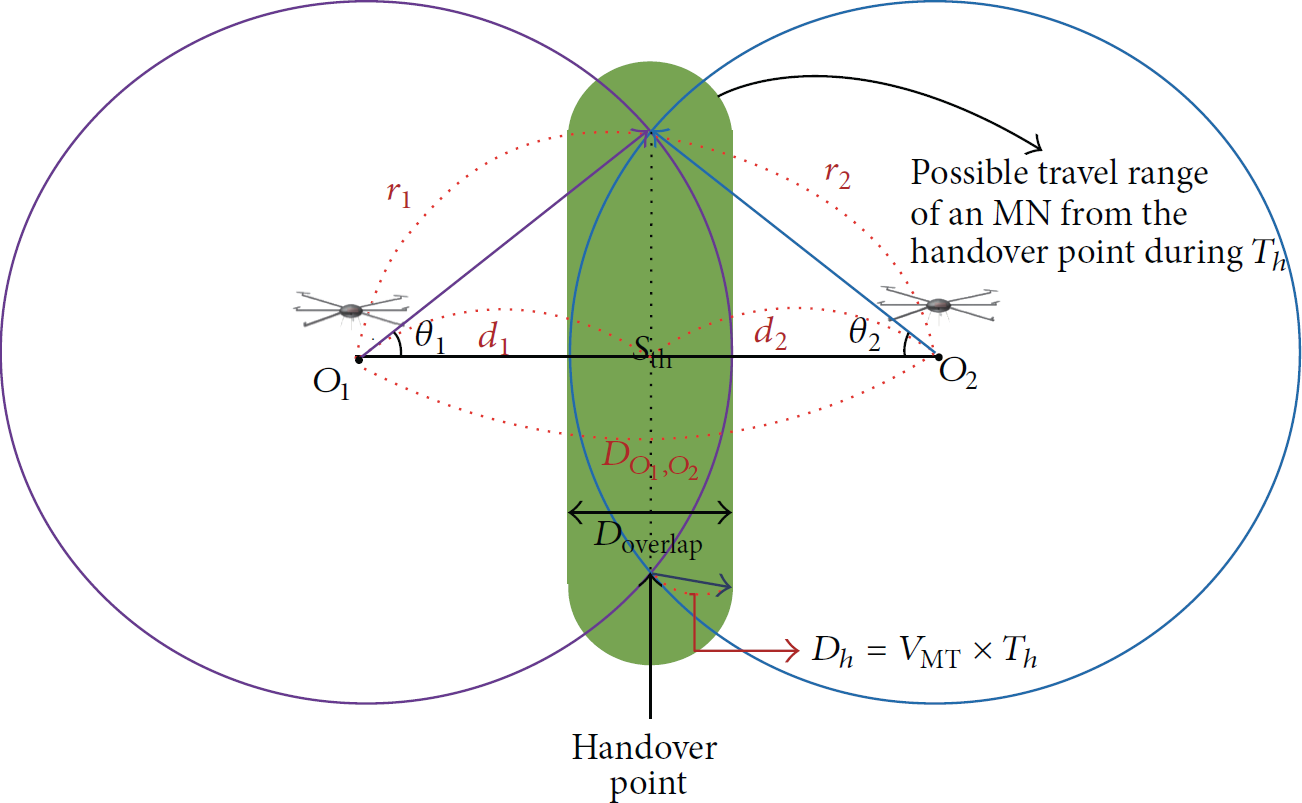
Distances in the handover procedure from Drone A to Drone B. The coverage of drones can vary as their height changes.
By using (1) and (2), the distance between the center of a coverage and the triggering point,

The traditional RSS based handover decision algorithm usually assumes that the coverage of every AP is the same. In this case,
Figure 8 shows the variation of

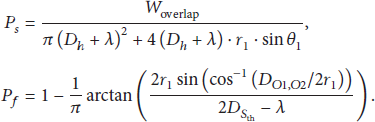
3.2. Seamless Handover Success Probability
Here, we introduce the seamless handover success probability
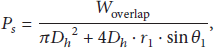
Calculation of the seamless handover success probability.
3.3. False Handover Initiation Probability
Now, we introduce the false handover initiation probability



Calculation of the false handover initiation probability.
4. The Proposed Coverage Decision Algorithm
In this section, we present a coverage decision algorithm which controls the coverage of each net-drone. Mainly, the algorithm controls the height of each drone. As the flight altitude of a net-drone lowers, its coverage will expand. Consequently, net-drones should be placed as low as possible under certain physical constraint.
In our algorithm, the key idea is to adjust the height of each net-drone in order to make the coverage of each drone the same. First, calculate the coverage of every drone at its lowest possible height. Then, select the drone with the smallest coverage denoted by
In addition, we need to consider the intercoverage distance. If the distance is short, the interference between net-drones will become significant. Also, the number of net-drones to cover a given area will be increased. On the contrary, if the intercoverage distance is long, the communication between drones may not work properly.
To resolve the intercoverage issue, we use the seamless handover success probability and the false handover initiation probability. First, from Figure 9, the optimal seamless handover probability is attained when

Flow chart of the proposed coverage decision algorithm.
Drone is aerial vehicle. Hence, it is deeply affected by climate environment or obstacle. In addition, net-drone is mostly desired disaster area. There are some unexpected obstacles such as broken building that is able to exist. In these cases, it is hard to keep optimal coverage. If drone can not move to lower altitude because of obstacle, the minimum altitude of drone should be changed. In other cases, if drone can not keep the present position by climate problems such as wind, the moved drones need to increase RSS to cover network service area to keep seamless handover. In this situation, optimal coverage temporarily can not exist before drone is back to the previous position. Unfortunately, if RSS is already the maximum power, there will be no immediate response, but drone will be able to cope with this problem by lowering the altitude. If drones are unable to reach the designated destination due to poor weather condition, the hardware performance needs to be upgraded or the mission needs to be aborted immediately.
5. Simulation Study
In this section, in order to show the effectiveness of the proposed scheme, we carry out simulation to show the change of
Parameters used in simulation.
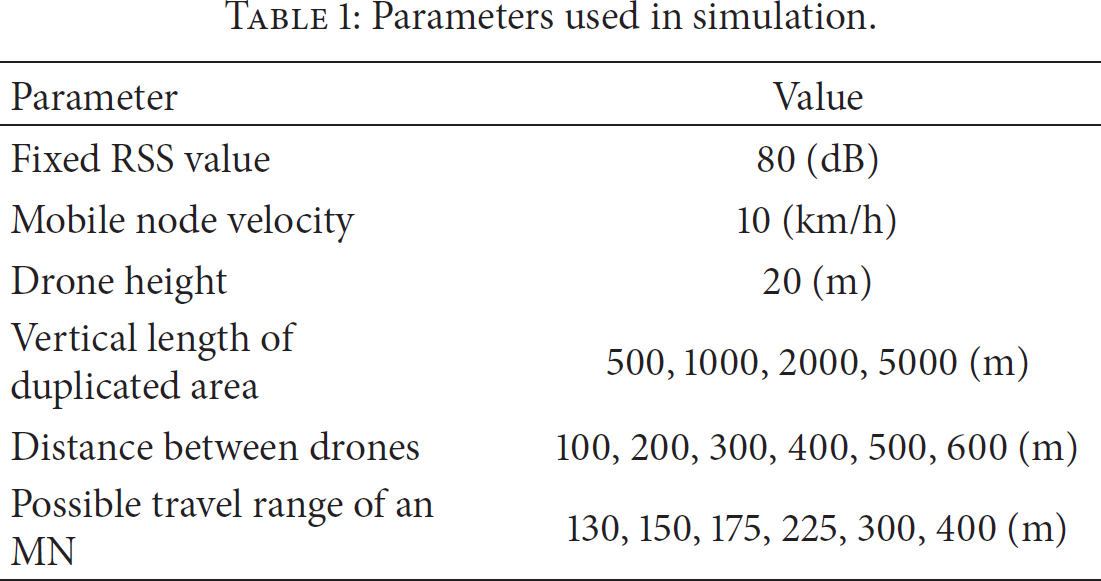
Figure 12 shows the relation between the false handover initiation probability

Relation between the false handover initiation probability and the vertical distance of the overlapped area.

Relation between the seamless handover success probability and the L3 handover necessity time.
We also perform simulation to show the relation of the RSS and the probabilities. Generally, RSS fluctuates due to the measurement error of the receiver and the attenuation by various noises in the wireless environment. Consequently, the mean value of the RSS during the RSS measurement time is used instead of the instantaneous value as follows:

In Figure 14, the seamless handover success probability decreases as the average RSS measurement increases. On the other hand, Figure 15 shows that the false handover initiation probability decreases as the average RSS measurement time increases because MT is getting closer to the point at which L3 handover is initiated.

Relation between average RSS measurement time and the seamless handover success probability.

Relation between average RSS measurement time and false handover initiation probability.
6. Conclusions
In this paper, we propose an efficient handover decision algorithm for aerial networks consisting of drones entitled net-drones. The proposed scheme can save the battery of drones by preventing frequent handover caused by the time-varying aerial environment. Unlike the conventional handover mechanisms which assume the same coverage of access points in the two-dimensional area, we consider that each drone can have different coverage according to its altitude in the three-dimensional space. Hence, we introduce a received signal strength (RSS) based coverage decision algorithm that can determine the coverage of each drone by controlling its height as well as the distance between drones. We also use the seamless success probability and the false handover initiation probability for finding the optimal overlapped coverage, which minimizes the interference between net-drones and makes RSS of every net-drone the same.
Footnotes
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
This work has been supported by Samsung Research Funding Center of Samsung Electronics under Project no. SRFCIT1401-09.