
Abstract
In cognitive radio (CR), cooperative spectrum sensing (CSS) has been extensively explored to be accounted for in a spectrum scanning method that permits secondary users (SUs) or cognitive radio users to utilize discovered spectrum holes caused by the absence of primary users (PUs). This paper focuses on optimality of analytical study on the common soft decision fusion (SDF) CSS based on different iterative algorithms which confirm low total probability of error and high probability of detection in detail. In fact, all steps of genetic algorithm (GA), particle swarm optimization (PSO), and imperialistic competitive algorithm (ICA) will be well mentioned in detail and investigated on cognitive radio cooperative spectrum sensing (CRCSS) method. Then, the performance of CRCSS employing GA-, PSO-, and ICA-based scheme is analysed in MATLAB simulation to show superiority of these schemes over other conventional schemes in terms of detection and error performance with very less complexity. In addition, the ICA-based scheme also reveals noticeable convergence and time running performance in comparison to other techniques.
1. Introduction
Radio spectrum is a precious resource and characterized by fixed allocation policy. However, most of allocated spectrum is underutilized by licensed users [1]. Conversely, the rapid development of ubiquitous wireless technologies increases the demand for radio spectrum. Federal Communications Commission (FCC) used the Static Spectrum Allocation (SSA) scheme to allocate spectrum bands to users exclusively since licensed users do not occupy radio spectrum or even at least whole of it all the time. As a solution to the spectrum inefficiency problem, cognitive radio (CR) is an exciting and emerging technology, which has attracted a great deal of attention in recent years to enhance the utilization of limited resources [1]. In CR network, licensed or primary users (PUs) coexisted with the unlicensed or secondary users (SUs) in the same frequency band to achieve better spectrum utilization [2]. Also, a key technology that can help mitigate the scarcity of spectrum is CR [3, 4]. In other words, SUs can opportunistically access the licensed spectrum without causing interference to the PUs. By using this access strategy, the spectrum resources can be assured to enhance the spectrum efficiency thus significantly increases the number of users using wireless services, which can greatly resolve spectrum scarcity problem. However, detection performance may be affected by shadowing effect and the hidden terminal problem and SU may not detect the activity of the PU within the short interval of sensing period [5]. Thus, to solve this issue, cooperative spectrum sensing (CSS) was proposed by [6, 7]; it is based on continuing to monitor the spectrum periodically to overcome hidden terminal and shadowing problems for minimizing interference. The well-established local sensing mechanism for spectrum sensing in CR networks is energy detection. It does not require the prior knowledge about the signal of PU. Also, it has short sensing time and represents a simple technique, low implementation cost, and compatibility with legacy primary systems. The energy detectors measure received signal's power to check the existence of PU with unknown power strength, waveform structure, and frequency location (with as less complexity as possible). The results that are collected from energy detectors will be forwarded to a fusion centre (FC), where the global decision on the existence of PU will be taken based on two methods, namely, soft decision fusion (SDF) and hard decision fusion (HDF) [8–11]. Also in [12], SDF-based linear CSS methods were applied to find the ideal weights. Different conventional approaches implemented at the FC to maximize probability of detection (
2. System Model
SDF-based CSS is applied to enhance reliability of detection done by SUs when local CSS is used, and, hence, local spectrum sensing can be accomplished via energy detection without any prior information of the PU signal [16]. Figure 1 demonstrates the centralized CSS SDF-based scenario, where M SUs (as relays) send their measurements on the activity of PU to FC to make decision on the presence of PU [10].

Block diagram of the cooperative spectrum sensing.
Figure 1 is modelled as channels starting from the PUs to FC which are assumed to be Rayleigh fading (different gains) and noise is AWGN with different variance in each path. During the entire frame duration, it is assumed that the PUs present in different time in channel; thus, the CSS process can be given as binary hypothesis testing:

Cognitive radio networks (CRNs) are mathematically modeled under two main criteria: Mini-Max [15] and Neyman-Pearson [14] criterion, which are individually defined as follows.
3. Neyman-Pearson Criteria
This criterion was introduced based on the problem of the most efficient tests of statistical hypotheses [17]. This section applied Neyman-Pearson criterion as opportunity of minimum interference that happened by SU to PU in active position:


4. Mini-Max Criteria
Mini-Max method is able to trade off between spectrum utilization and interference in PU [10, 13]. In other words, we plan to minimize

5. GA-Based Cooperative Spectrum Sensing
GA is one of the stochastic iterative search algorithms that follow natural evolution. It has been used for several engineering applications, such as solving complicated nondeterministic problems as well as machine learning. GA is a population-based method in which each individual in the population evolves to create new individuals that form new populations. This evolutionary procedure iteratively goes on until no improvement on the fitness score is achieved and then the optimal individual (fitness score) is achieved from the last updated population.
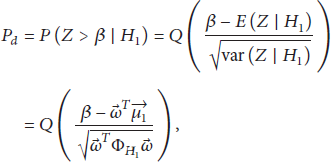
In this paper, GA-based technique has been proposed; an initial population of pops (possible alternatives) is produced randomly such that each individual is normalized to fulfill the limitations. Here, our main objective is to discover the best set of weighting coefficients to maximize detection reliability. When the maximum number of generations is reached (predefined level), GA process is ended and the weighted vector values that minimize the probability of error are obtained as the best solution. If we assume that there are M SUs and



GA crossover operation [13].
For parent 1 (




GA mutation representation [13].
6. Mini-Max Criteria for Genetic Algorithm
The GA-based optimization algorithm for SDF-based CSS can be outlined as follows.
Step 1.
Adjust
Step 2.
Every chromosome in the random population must be decoded into its analogous weighting vector, where the weighting coefficient vector
Step 3.
Normalize the weighting coefficient vector dividing by its 2-norm such that
Step 4.
Compute the fitness value of every normalized decoded weighting vector,
Step 5.
Update
Step 6.
Construct a new set of population pops by concatenating the newly
Step 7.
Decode and normalize the chromosomes of the new population pops as in Steps 2 and 3, respectively.
Step 8.
Evaluate the fitness value of each chromosome as in Step 4.
Step 9.
If it is equal to a predefined number of generations (iterations) ngener, then stop. Otherwise, go to Step 5.
7. Neyman-Pearson Criteria for Genetic Algorithm
Step 1.
It remains the same as Mini-Max criteria step.
Step 2.
It remains the same as Mini-Max criteria step, but the condition must satisfy the condition, which is used to maximize the detection probability.
Step 3.
It remains the same as Mini-Max criteria step.
Step 4.
It remains the same as Mini-Max criteria step.
Step 5.
It remains the same as Mini-Max criteria step.
Step 6.
It remains the same as Mini-Max criteria step but this time reproduced chromosomes with the best
Step 7.
It remains the same as Mini-Max criteria.
Step 8.
It remains the same as Mini-Max criteria.
Step 9.
It remains the same as Mini-Max criteria.
8. PSO-Based Cooperative Spectrum Sensing
PSO algorithm, invented by Kennedy and Eberhart in 1995 [16], is conceptualized from social performance of a group of fishes and birds. This amazing algorithm imitates the performance of these organizations.
9. Mini-Max Criteria for Particle Swarm Optimization Algorithm
In this section, the objective is to explain how to minimize the objective function
Step 1.
Start the algorithm with arbitrarily producing N numbers of particle position as
Step 2.
Compute the objective functions' values for each of the particle positions in Step 1 as
Step 3.
The objective functions' values achieved in Step 2 are compared in this step and their smallest value is chosen. Next, the particle position equivalent to the minimum value is considered as
Step 4.
The velocity of the sth particle at the jth iteration is updated based on the following equation:

Step 5.
Update the sth particle's new position as


Step 6.
The values of the objective functions obtained in Step 5 are compared and the particle position corresponding to minimum value of the objective function is defined as

Step 7.
Check the convergence of the algorithm. Whenever algorithm converges to a stable value, the procedure is ended. Otherwise, update the iteration number
10. Neyman-Pearson Criteria for Particle Swarm Optimization Algorithm
Step 1.
It remains the same as Mini-Max criteria step.
Step 2.
Evaluate the values of objective function corresponding to initial particle positions as
Step 3.
Find the maximum value of the objective function in Step 2 and set its corresponding particle position as
Step 4.
It is like Step 3 in Mini-Max criteria.
Step 5.
Update the ith particle position at the jth iteration using

Evaluate the values of objective function corresponding to new particle positions as
Step 6.
Find the maximum value of the objective function in Step 5 and set its corresponding particle position as
Step 7.
If the algorithm is converged to a stable value, stop the process. Otherwise, set the iteration number as
11. Imperialistic Competitive Algorithm
ICA is inspired from imperialistic competition and human's sociopolitical evolutions [19–21]. The optimization targets in this research are, respectively, maximizing probability detection and minimizing the probability of error in the Neyman-Pearson and Mini-Max criteria. ICA begins with an initial population consisting of countries that are considered as individuals in other iterative-based algorithms. This population is divided into two groups, a group with the finest (in Neyman-Pearson highest and in Mini-Max lowest) objective function values, power, which is chosen to be the imperialists, whereas the remaining group is their colonies. Then the colonies are distributed among the imperialists according to each imperialist power. Figure 4(a) depicts the initial colonies for each empire when superior empires have larger quantity of colonies, for example, imperialist 1. As an imperialist grows stronger, it will own more colonies. Empire is formed from an imperialist with its colonies in ICA language when each individual colony will try to discover better position to be named as imperialist of its empire. This method is fulfilled in ICA by moving the colonies towards their imperialist, named assimilation. It is possible that a colony turns out to be more powerful than its imperialist during assimilation, so the colony displaces the imperialist and the imperialist becomes one of its colonies. Moreover, it may be seen that, through imperialistic competition, the most powerful empires attempt to raise their power, while weaker ones are losing their power to break down. Both structures head the algorithm to steadily converge into a single empire, in which the imperialist and all the colonies have similar culture.

(a) Imperialists and colonies in each empire. (b) A colony's travel toward imperialist.
12. Neyman-Pearson Criteria for Imperialistic Competitive Algorithm
Step 1.
Start the algorithm with generating (
Step 2.
In this step, countries are divided into imperialists

Step 3.
This step is imperialistic competition such that each imperialist tries to extend its colonies. Figure 4(b) illustrates that all colonies travel to their related imperialist (x is unit of colony move). The new position of this colony is shown in darker blue. Amount of x is uniformly selected; that is,

Unavoidably, the colony is departed minus of consuming the classification of θ because these random values are not essentially identical. Stating a new vector in order to have the suitable exploration capability (search area) satisfies the utilization of θ.
Step 4.
Exchange the position of a colony and its imperialist if the colony in empire possesses lower cost than imperialist. It means that while colonies are moving toward imperialist, one colony is capable of getting a better position (get more power) than imperialist.
Step 5.
Calculate the total cost of all empires. Generally, imperialist cost affects the cost of each empire, but, to have an accurate view of an empire, the average cost of empire's colonies should not be eliminated. Below we have modeled this fact by stating the total cost of each empire:

Step 6.
Select the most vulnerable colony from weakest empire and deliver it to one of the most powerful empires.
Step 7.
When all colonies of an empire are delivered to other powerful empires, the only remaining country, that is, imperialist, automatically joins the best empires as a simple colony.
Step 8.
Stop the algorithm whenever one empire remains. Otherwise, go to Step 2. The result of the problem is the final imperialist.
13. Mini-Max Criteria for Modified Imperialistic Competitive Algorithm
Steps of ICA for Mini-Max are very close to Neyman-Pearson criteria. Since Mini-Max is always used for minimization, some steps are different as below while applied parameters remain the same.
Step 1.
The imperialists are usually the countries with the lowest objective function values. The amount of the objective function for each of the countries generated in this step is calculated as
Step 2.
The colonies will be distributed among the imperialists according to their power:

Step 3.
Colonies move towards imperialist states in different directions (assimilation) and x is transferred colony distance, where
Step 4.
If a colony in empire has a higher cost than imperialist the position of a colony and the imperialist will exchange.
Step 5.
The total cost of each empire is as follows:

14. Classified Results and Analysis
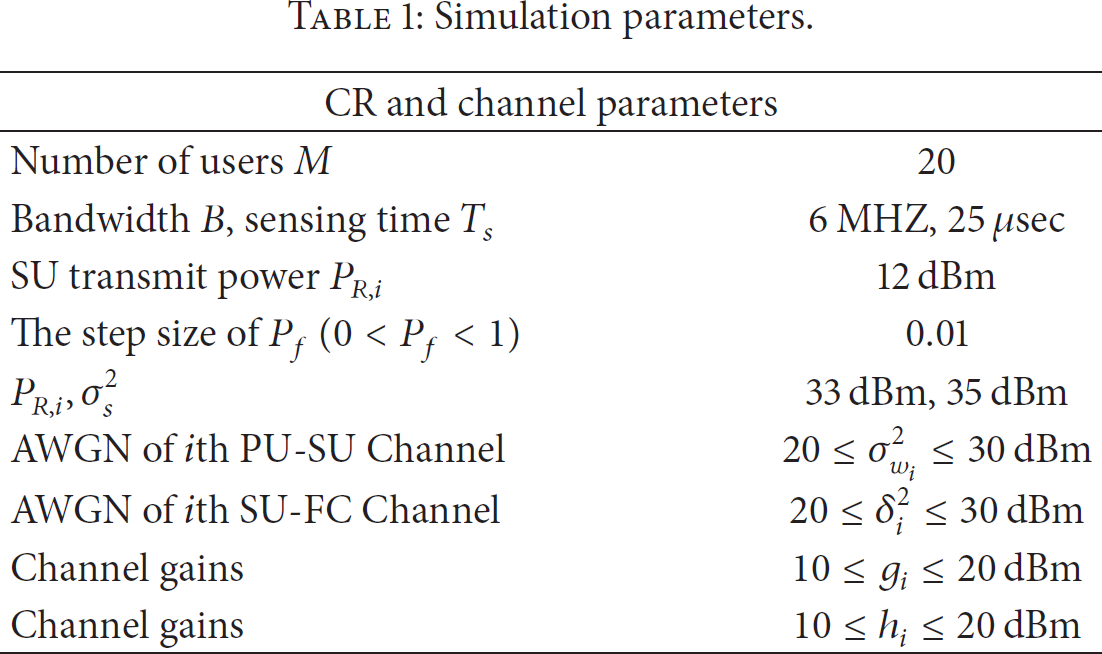
Table 1 illustrates the general simulation parameters applied to this paper. To fulfill the low SNR environments (SNR < −10 dB) at SU and FC levels, the quantities of
Simulation parameters.
Different parameter values used for testing.

Optimal parameter values.

15. Results and Analysis for Neyman-Pearson Criteria
Figure 5 shows the probability of detection of ICA-based system as well as all other methods with regard to the different false alarm probabilities. It is noticeable that ICA-assisted method outperforms all other schemes with a large difference, which confirms the strength of our proposed method. For example, for the fixed
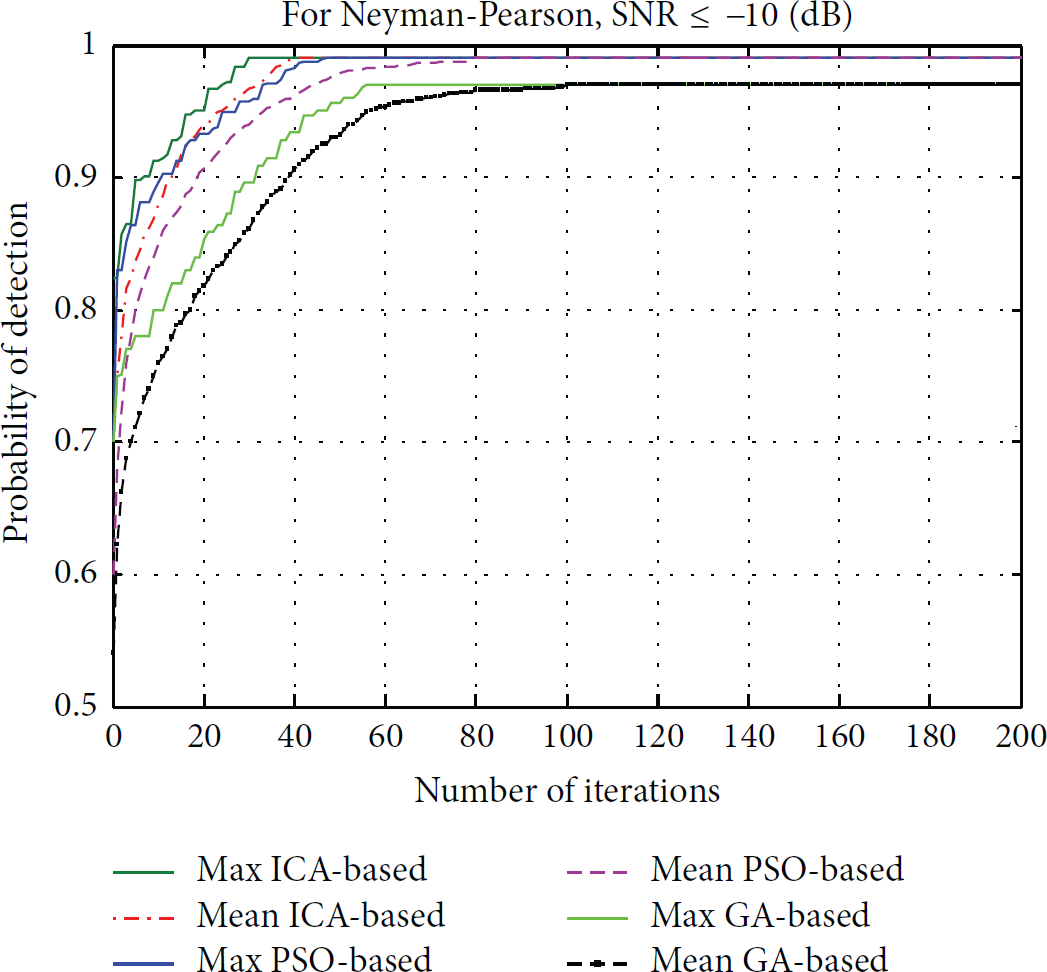
Comparison of probability of detection over 200 iterations for fixed
Figure 5 also reveals the comparison of convergence for ICA-, PSO-, and GA-assisted methods over 200 iterations per simulation for a given
Comparison of performance of ICA- and PSO-assisted methods for different number of population.

Table 4 compares the probability of detection for ICA- and PSO-assisted scheme in which the result of the number of the population is quite observable. Generally, performing time and computational complexity of these approaches will be increased with larger number of the population. On the other hand, choosing the number of countries and particles is problem dependent and depends on different factors, like number of iterations, learning coefficient, assimilation coefficient, deviation coefficient, and so on; for example, the performance of the ICA with 25 countries is the best among all, but, in comparison with larger numbers of countries, there is still a trade-off between very slight improvements, complexity and performing time, which is well explained in Table 4.
“Not” in Table 4 specifies that, in each simulation of ICA-based method, it is not able to converge during 200 iterations. In other words, ICA-assisted method needs more iterations and performing time to be converged for the number of 5 and 10 populations. Additionally, convergence time is computer dependent and varies from one to another.
16. Results and Analysis for Mini-Max Criteria
Figure 6 compares the convergence rate of ICA-assisted based scheme with other schemes. Here, the probability of error over 200 iterations is evaluated for iterative-based methods in both conditions of mean and max. The mean and max of each algorithm are achieved when the algorithms run for 100 times and the average of all results is called mean in our experiment and the best one among all these 100 simulations which results in minimum
Comparison of performance of ICA- and PSO-assisted methods for different number of population.


Comparison of probability of error over 200 iterations for ICA, PSO, and GA.
Additionally, when the number of SUs in the system increases, the cooperation with the system will be increased. As a result, separation between two hypotheses (
17. Conclusion
Cognitive radio cooperative spectrum sensing (CRCSS) is one of the most attractive techniques and well inspected to be acknowledged as a frequently monitoring mechanism which permits secondary users to utilize sensed spectrum holes caused by PU absence. A chief challenge encountering CSS in CR networks is to select the suitable weighting coefficient for each single SU in fusion center (FC). Subsequently, methods to adjust these coefficients are essentials for the overall detection performance of the system. This research presents best existing methods in CRCSS according to previously achieved results by other researches, namely, ICA-, PSO-, and GA-based methods in both criteria of Neyman-Pearson and Mini-Max criterion for the first time. The attained outcomes validated that the ICA-based method outperforms all other SDF-assisted techniques with its less complexity that makes this method very appropriate to real time applications.
Footnotes
Appendix
The particular structure involving CRCSS is actually shown in Figure 1, where M SUs inside the network send their particular local sensed statistics to FC. At each SU, the sensing job can be presented as two different binary hypotheses:
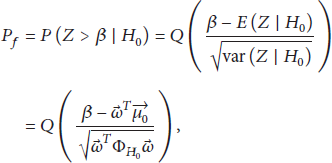
After some simplifications, we can obtain the optimal threshold β that will minimize the total probability of error:
Finally, the replaced value of β (which should be a scalar value) will then be substituted back into (A.4). Summing them up, we would have the total probability of error
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research work is supported by the FRGS Grant FRGS/1/2012/TK06/UPNM/01/01 and University of Malaya Research Grant (UMRG) scheme (RG286-14AFR).